
init
parents
Showing
CMakeLists.txt
0 → 100644
README.md
0 → 100644
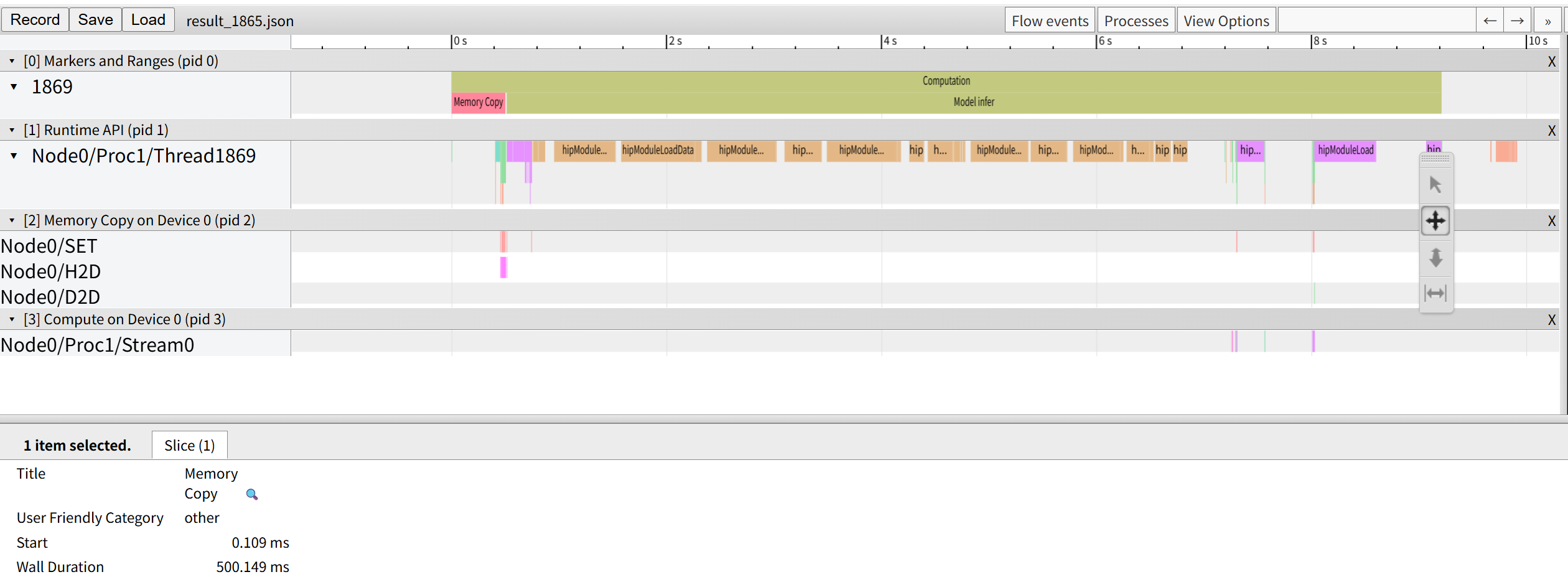
images/profiling.png
0 → 100644
{kind=link}
174 KB
include/roctracer_wrapper.h
0 → 100644
python/roctracer_pybind.cpp
0 → 100644
setup.py
0 → 100644
src/roctracer_wrapper.cpp
0 → 100644
tests/clean-hipprof-cache.sh
0 → 100644
tests/hiptx-demo.cpp
0 → 100644
File added
File added
File added
File added
tests/test_roctracer.py
0 → 100644