
yolov9_pytorch
Showing
LICENSE.md
0 → 100644
README.md
0 → 100644
benchmarks.py
0 → 100644
classify/predict.py
0 → 100644
classify/train.py
0 → 100644
classify/val.py
0 → 100644
data/coco.yaml
0 → 100644
data/images/horses.jpg
0 → 100644
{kind=link}

130 KB
detect.py
0 → 100644
detect_dual.py
0 → 100644
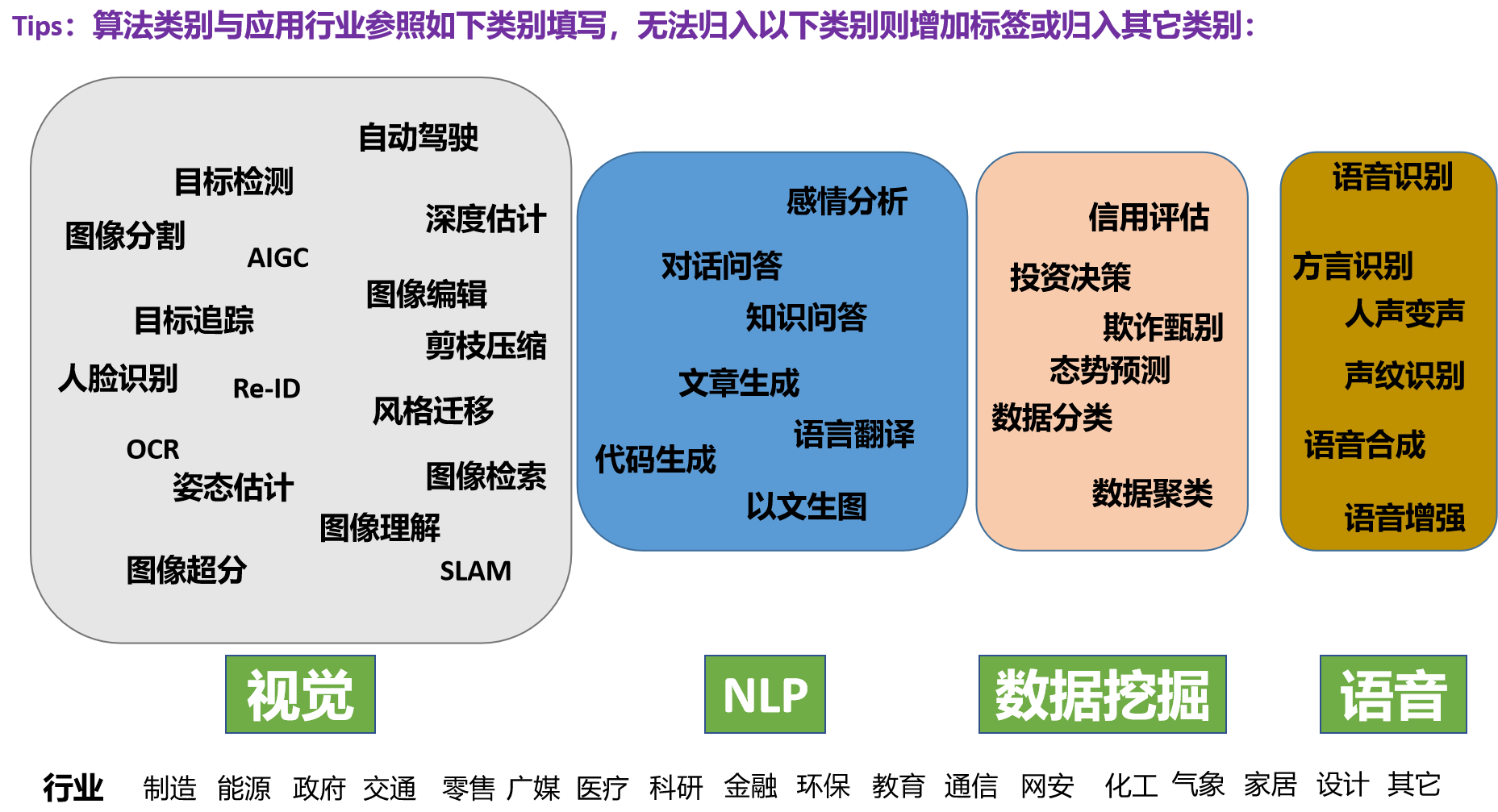
doc/classes.png
0 → 100644
{kind=link}
199 KB
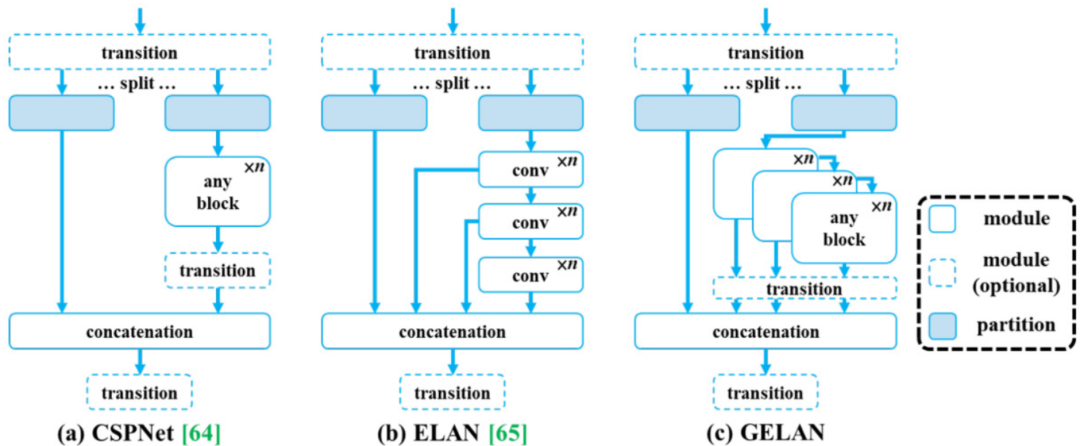
doc/gelan.png
0 → 100644
{kind=link}
213 KB
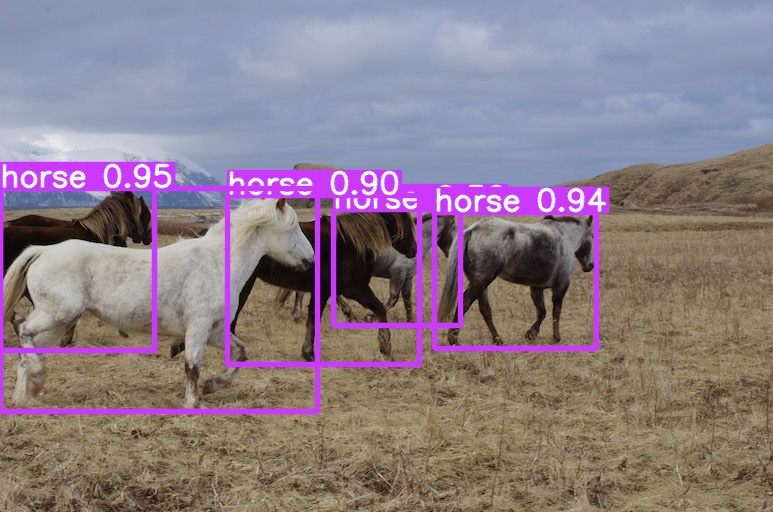
doc/horses_prediction.jpg
0 → 100644
{kind=link}
154 KB
doc/icon.png
0 → 100644
{kind=link}
2.27 KB
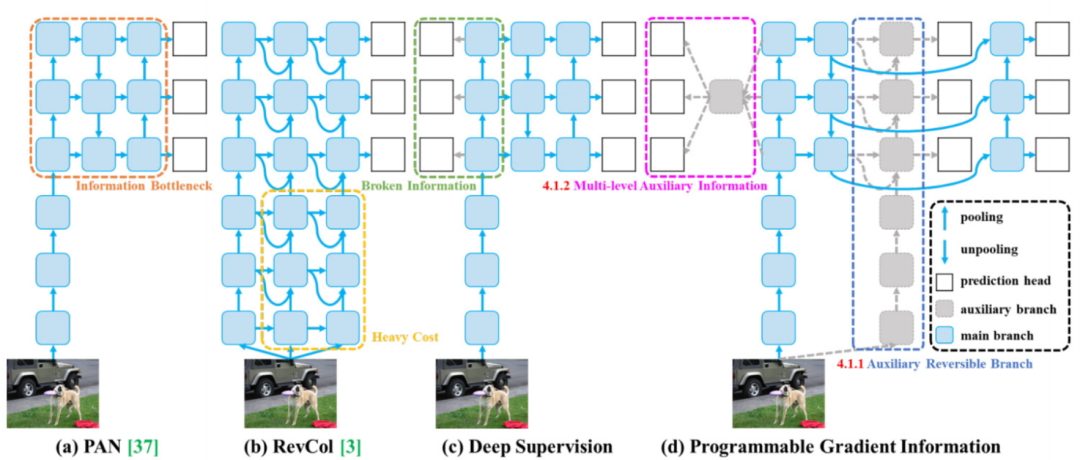
doc/pgi.png
0 → 100644
{kind=link}
326 KB
doc/readme.png
0 → 100644
{kind=link}
230 KB
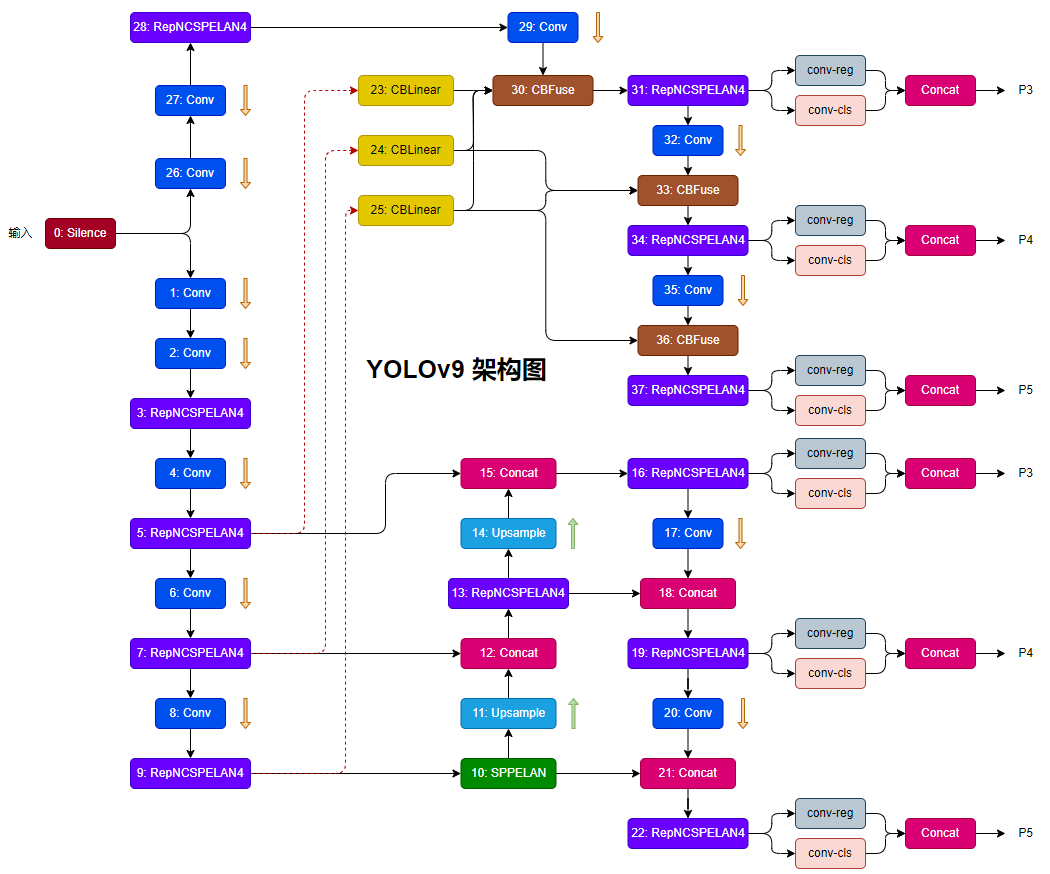
doc/yolov9-model.png
0 → 100644
{kind=link}
96.9 KB
docker/Dockerfile
0 → 100644
export.py
0 → 100644