first init
Showing
model/yolov8n.pt
0 → 100644
File added
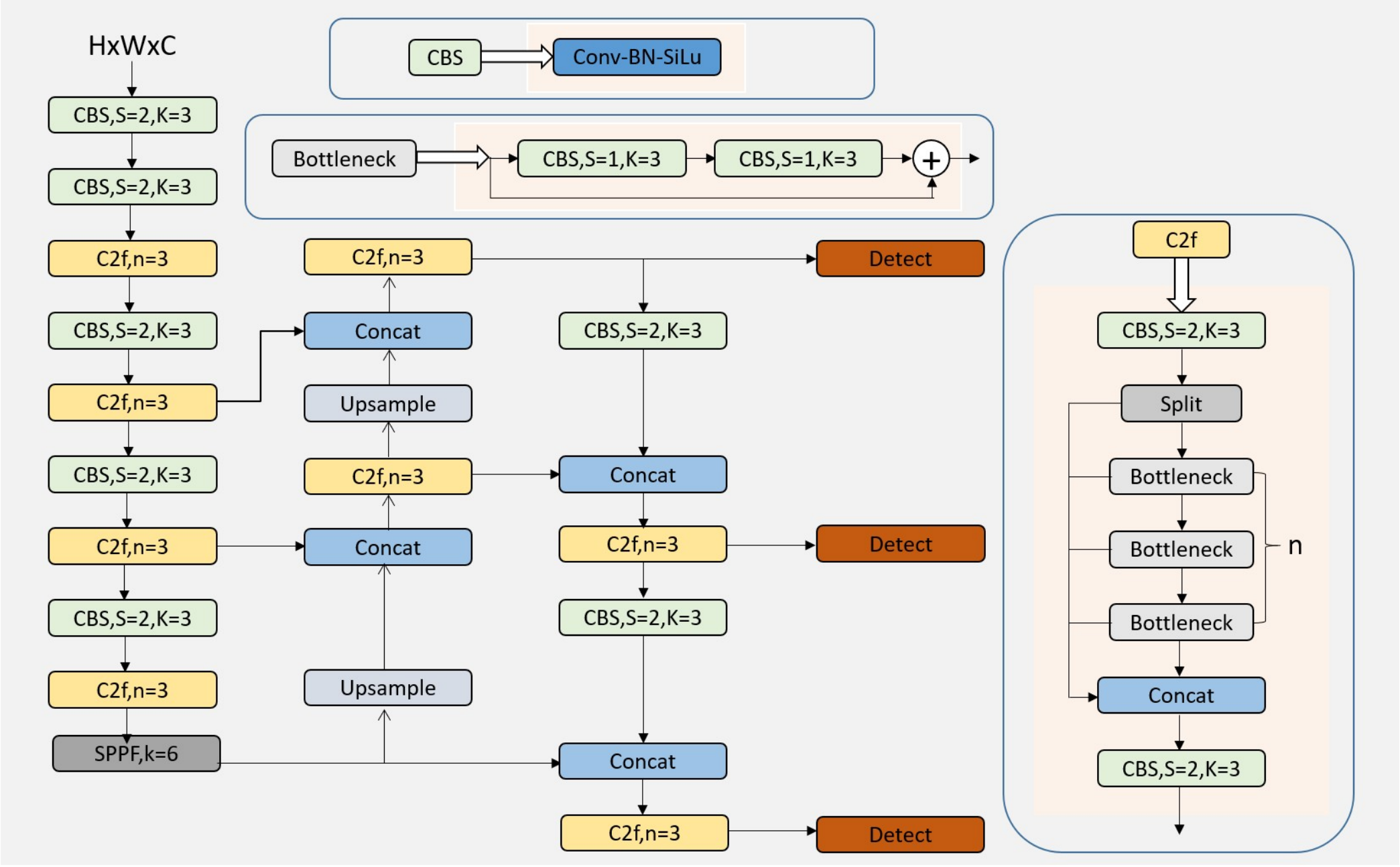
model_framework.png
0 → 100644
{kind=link}
883 KB
src/main.cpp
0 → 100644
src/utils.cpp
0 → 100644
src/yolov8Predictor.cpp
0 → 100644