Skip to content
GitLab
Menu
Projects
Groups
Snippets
Loading...
Help
Help
Support
Community forum
Keyboard shortcuts
?
Submit feedback
Contribute to GitLab
Sign in / Register
Toggle navigation
Menu
Open sidebar
ModelZoo
yolov7_migraphx
Commits
b6dc9b65
Commit
b6dc9b65
authored
Oct 17, 2023
by
liucong
Browse files
修改yolov7工程格式
parent
ac61a351
Changes
3
Hide whitespace changes
Inline
Side-by-side
Showing
3 changed files
with
65 additions
and
34 deletions
+65
-34
Doc/YoloV7模型结构.png
Doc/YoloV7模型结构.png
+0
-0
README.md
README.md
+60
-31
model.properties
model.properties
+5
-3
No files found.
Doc/YoloV7模型结构.png
0 → 100644
View file @
b6dc9b65
2.17 MB
README.md
View file @
b6dc9b65
# YoloV7
# YoloV7
##
模型介绍
##
论文
YOLOV7是2022年最新出现的一种YOLO系列目标检测模型,在论文
[
YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors
](
https://arxiv.org/abs/2207.02696
)
中提出。
YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors
-
https://arxiv.org/pdf/2207.02696.pdf
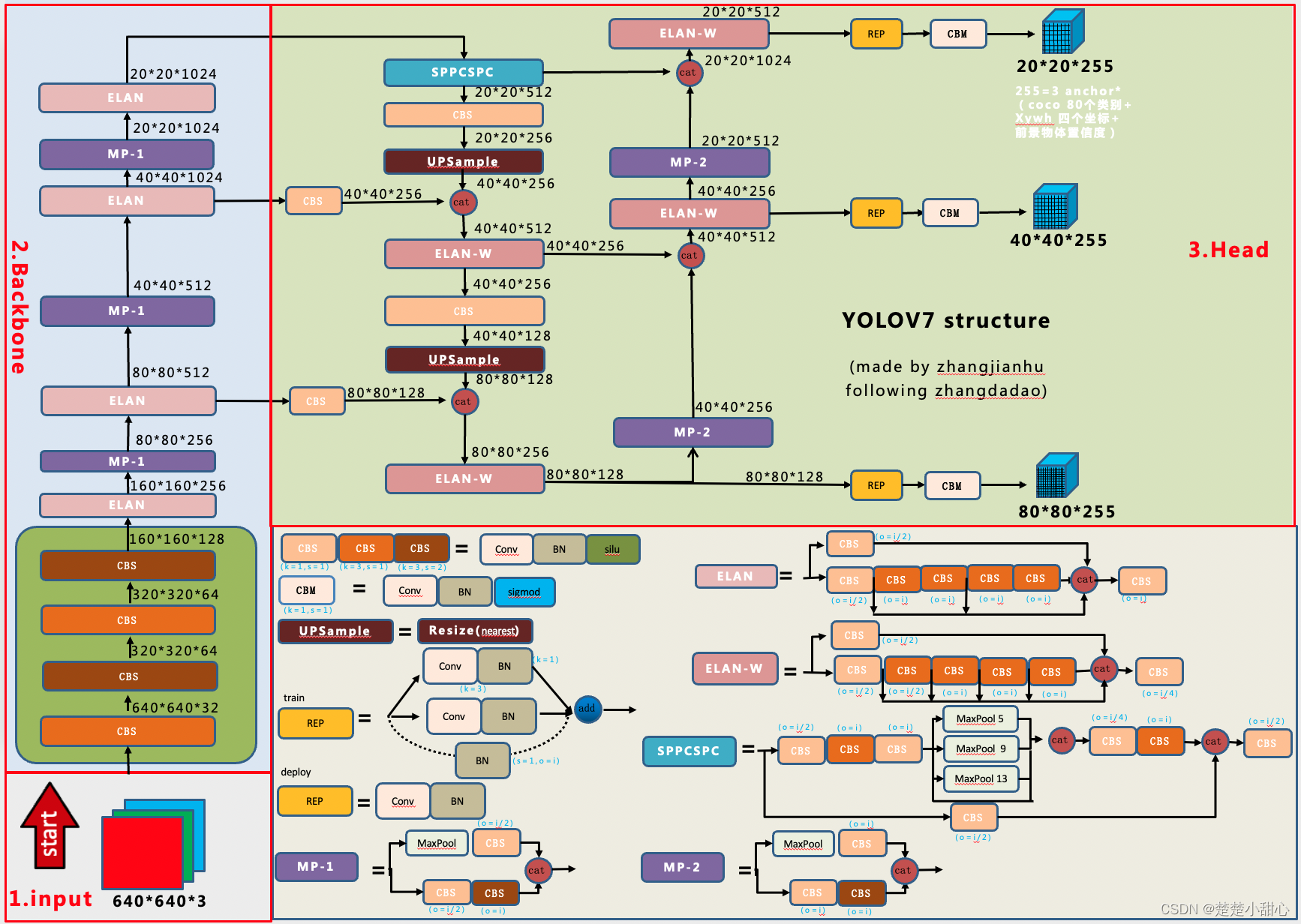
## 模型结构
## 模型结构
YOLOV7是2022年最新出现的一种YOLO系列目标检测模型,在论文
[
YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors
](
https://arxiv.org/abs/2207.02696
)
中提出。
<img
src=
"./Doc/YoloV7模型结构.png"
alt=
"YOLOV7_02"
style=
"zoom:67%;"
/>
## 算法原理
YoloV7模型的网络结构包括三个部分:input、backbone和head。与yolov5不同的是,将neck层与head层合称为head层,实际上的功能是一样的。各个部分的功能和yolov5相同,如backbone用于提取特征,head用于预测。yolov7依旧基于anchor based的方法,同时在网络架构上增加E-ELAN层,并将REP层也加入进来,方便后续部署,同时在训练时,在head时,新增Aux_detect用于辅助检测。
YoloV7模型的网络结构包括三个部分:input、backbone和head。与yolov5不同的是,将neck层与head层合称为head层,实际上的功能是一样的。各个部分的功能和yolov5相同,如backbone用于提取特征,head用于预测。yolov7依旧基于anchor based的方法,同时在网络架构上增加E-ELAN层,并将REP层也加入进来,方便后续部署,同时在训练时,在head时,新增Aux_detect用于辅助检测。
##
Python版本推理
##
环境配置
下面介绍如何运行Python代码示例,Python示例的详细说明见Doc目录下的Tutorial_Python.md。
拉取镜像:
```
plaintext
docker pull image.sourcefind.cn:5000/dcu/admin/base/migraphx:4.0.0-centos7.6-dtk23.04.1-py38-latest
```
### 下载镜像
创建并启动容器:
下载MIGraphX镜像:
```
plaintext
docker run --shm-size 16g --network=host --name=yolov7_migraphx --privileged --device=/dev/kfd --device=/dev/dri --group-add video --cap-add=SYS_PTRACE --security-opt seccomp=unconfined -v $PWD/yolov7_migraphx:/home/yolov7_migraphx -it <Your Image ID> /bin/bash
```
python
# 激活dtk
docker
pull
sugonhub
/
migraphx
:
3.2
.
1
-
centos7
.
6
-
dtk
-
23.04
.
1
-
py38
source /opt/dtk/env.sh
```
```
### 设置Python环境变量
## 数据集
根据提供的样本数据,进行目标检测。
## 推理
### Python版本推理
下面介绍如何运行Python代码示例,Python示例的详细说明见Doc目录下的Tutorial_Python.md。
#### 设置环境变量
```
```
export PYTHONPATH=/opt/dtk/lib:$PYTHONPATH
export PYTHONPATH=/opt/dtk/lib:$PYTHONPATH
```
```
### 安装依赖
###
#
安装依赖
```
```
# 进入python示例目录
# 进入python示例目录
cd <path_to_yolov7_migraphx>/Python
cd <path_to_yolov7_migraphx>/Python
# 安装依赖
# 安装依赖
pip install -r requirements.txt
pip install -r requirements.txt
-i https://pypi.tuna.tsinghua.edu.cn/simple
```
```
### 运行示例
###
#
运行示例
YoloV7模型的推理示例程序是YoloV7_infer_migraphx.py,在Python目录下使用如下命令运行该推理示例:
YoloV7模型的推理示例程序是YoloV7_infer_migraphx.py,在Python目录下使用如下命令运行该推理示例:
...
@@ -49,30 +72,18 @@ python YoloV7_infer_migraphx.py \
...
@@ -49,30 +72,18 @@ python YoloV7_infer_migraphx.py \
--nmsThreshold nms阈值,默认0.5 \
--nmsThreshold nms阈值,默认0.5 \
```
```
程序运行结束会在当前目录生成YoloV7检测结果图像。
### C++版本推理
<img
src=
"./Resource/Images/Result.jpg"
alt=
"Result_2"
style=
"zoom: 50%;"
/>
## C++版本推理
下面介绍如何运行C++代码示例,C++示例的详细说明见Doc目录下的Tutorial_Cpp.md。
下面介绍如何运行C++代码示例,C++示例的详细说明见Doc目录下的Tutorial_Cpp.md。
### 下载镜像
下载MIGraphX镜像:
```
docker pull sugonhub/migraphx:3.2.1-centos7.6-dtk-23.04.1-py38
```
#### 构建工程
### 构建工程
```
```
rbuild build -d depend
rbuild build -d depend
```
```
### 设置环境变量
###
#
设置环境变量
将依赖库依赖加入环境变量LD_LIBRARY_PATH,在~/.bashrc中添加如下语句:
将依赖库依赖加入环境变量LD_LIBRARY_PATH,在~/.bashrc中添加如下语句:
...
@@ -86,7 +97,7 @@ export LD_LIBRARY_PATH=<path_to_yolov7_migraphx>/depend/lib64/:$LD_LIBRARY_PATH
...
@@ -86,7 +97,7 @@ export LD_LIBRARY_PATH=<path_to_yolov7_migraphx>/depend/lib64/:$LD_LIBRARY_PATH
source ~/.bashrc
source ~/.bashrc
```
```
### 运行示例
###
#
运行示例
成功编译YoloV7工程后,执行如下命令运行该示例:
成功编译YoloV7工程后,执行如下命令运行该示例:
...
@@ -101,16 +112,34 @@ cd ./build/
...
@@ -101,16 +112,34 @@ cd ./build/
./YOLOV7
./YOLOV7
```
```
程序运行结束会在build目录生成YoloV7检测结果图像。
## result
### Python版本
python程序运行结束后,会在当前目录生成目标检测图像。
<img
src=
"./Resource/Images/Result.jpg"
alt=
"Result_2"
style=
"zoom: 50%;"
/>
### C++版本
C++程序运行结束后,会在build目录生成目标检测图像。
<img
src=
"./Resource/Images/Result.jpg"
alt=
"Result"
style=
"zoom:50%;"
/>
<img
src=
"./Resource/Images/Result.jpg"
alt=
"Result"
style=
"zoom:50%;"
/>
## 应用场景
### 算法类别
`目标检测`
### 热点应用行业
`交通`
,
`教育`
,
`化工`
## 源码仓库及问题反馈
## 源码仓库及问题反馈
https://developer.hpccube.com/codes/modelzoo/yolov7_migraphx
https://developer.hpccube.com/codes/modelzoo/yolov7_migraphx
## 参考
## 参考
https://github.com/WongKinYiu/yolov7
https://github.com/WongKinYiu/yolov7
model.properties
View file @
b6dc9b65
#模型唯一标识
modelCode
=
217
#模型名称
#模型名称
modelName
=
Y
olo
V
7_
MIG
raph
X
modelName
=
y
olo
v
7_
mig
raph
x
#模型描述
#模型描述
modelDescription
=
YOLOV7是2022年最新出现的一种YOLO系列目标检测模型。
modelDescription
=
YOLOV7是2022年最新出现的一种YOLO系列目标检测模型。
#应用场景
#应用场景
appScenario
=
推理,
cv
,目标检测
appScenario
=
推理,
CV
,目标检测
#框架类型
#框架类型
frameType
=
MIGraphX
frameType
=
migraphx
\ No newline at end of file
\ No newline at end of file
Write
Preview
Markdown
is supported
0%
Try again
or
attach a new file
.
Attach a file
Cancel
You are about to add
0
people
to the discussion. Proceed with caution.
Finish editing this message first!
Cancel
Please
register
or
sign in
to comment

{kind=link}