init
parents
Showing
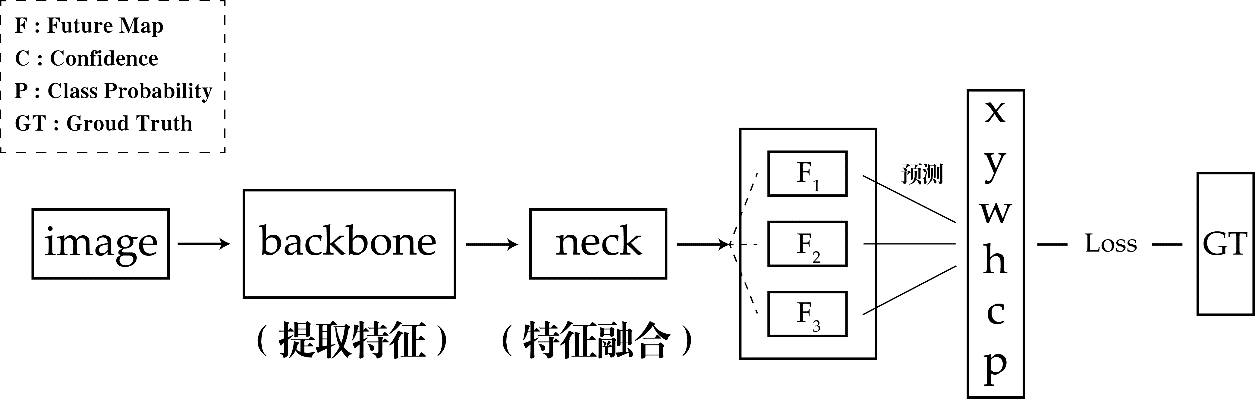
Algorithm_principle.png
0 → 100644
{kind=link}
32.2 KB
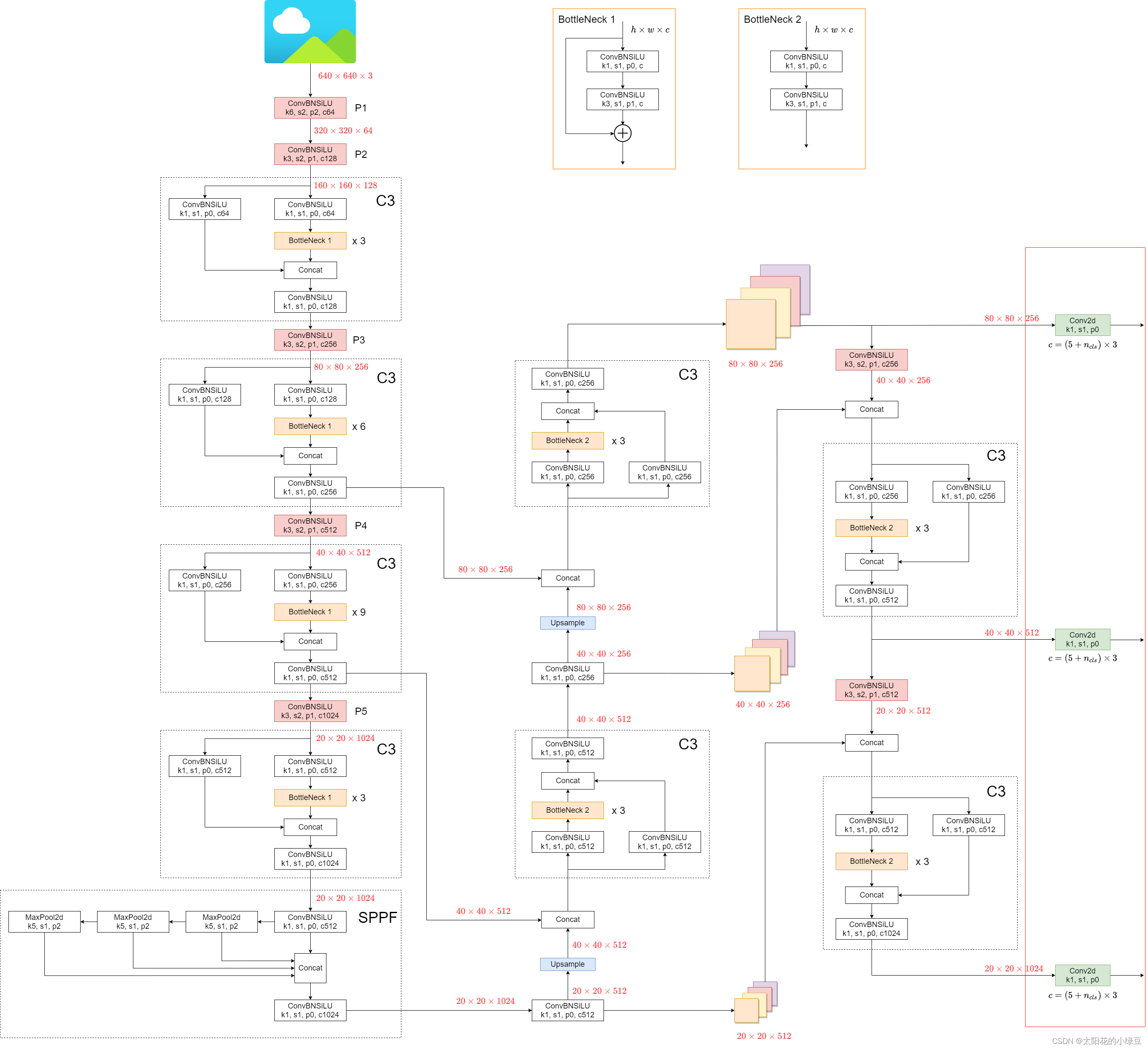
Backbone.png
0 → 100644
{kind=link}
379 KB
CMakeLists.txt
0 → 100644
README.md
0 → 100644
Resource/Images/bear.jpg
0 → 100644
{kind=link}

368 KB
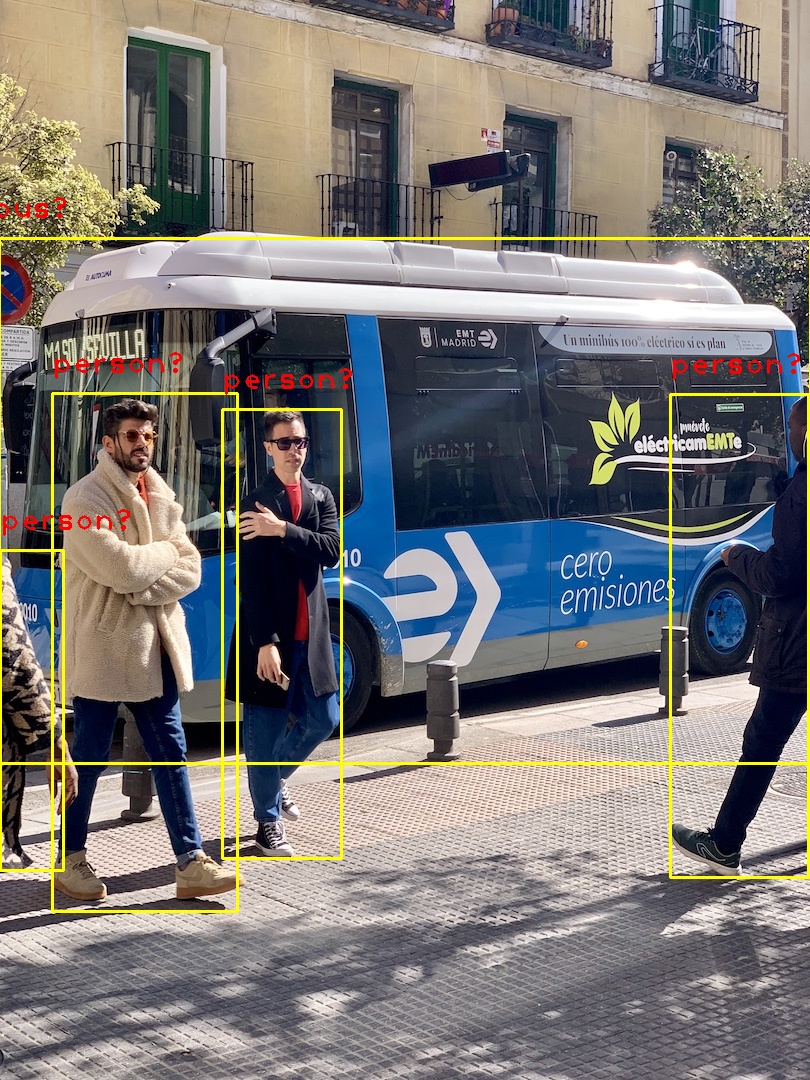
Resource/Images/bus.jpg
0 → 100644
{kind=link}

476 KB
Resource/Images/cat.jpg
0 → 100644
{kind=link}

137 KB
Resource/Images/dog.jpg
0 → 100644
{kind=link}

217 KB
File added
bus.jpg
0 → 100644
{kind=link}
481 KB
icon.png
0 → 100644
{kind=link}
77.3 KB
include/CommonUtils.h
0 → 100644
include/DetectorYOLOV5.h
0 → 100644
include/main.h
0 → 100644
lib/libQueue.so
0 → 100644
File added
lib/libdecode.so
0 → 100644
File added
model.properties
0 → 100644
src/CommonUtils.cpp
0 → 100644
src/DetectorYOLOV5.cpp
0 → 100644