
update code
Showing
Too many changes to show.
To preserve performance only 323 of 323+ files are displayed.
.gitignore
0 → 100644
.pre-commit-config.yaml
0 → 100644
.style.yapf
0 → 100644
.travis.yml
0 → 100644
LICENSE
0 → 100644
README_cn.md
0 → 100644
README_en.md
0 → 100644
{kind=link}
32.2 KB
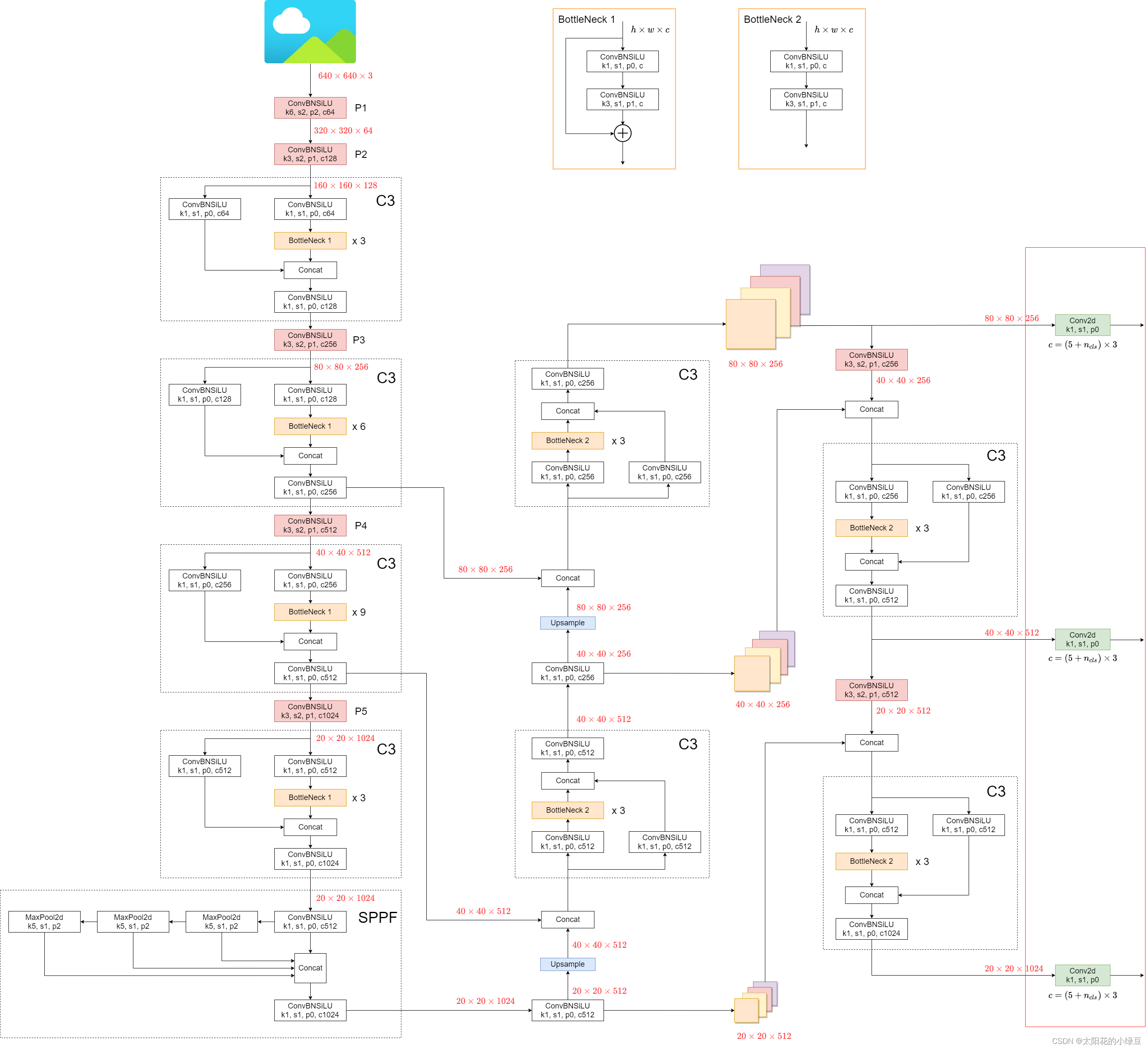
asserts/Backbone.png
0 → 100644
{kind=link}
379 KB
asserts/model.properties
0 → 100644
{kind=link}
273 KB
configs/datasets/voc.yml
0 → 100644
configs/runtime.yml
0 → 100644
configs/yolov5/README.md
0 → 100644