
提交yolov5推理示例
Showing
README.md
0 → 100644
YoloV5_infer_migraphx.py
0 → 100644
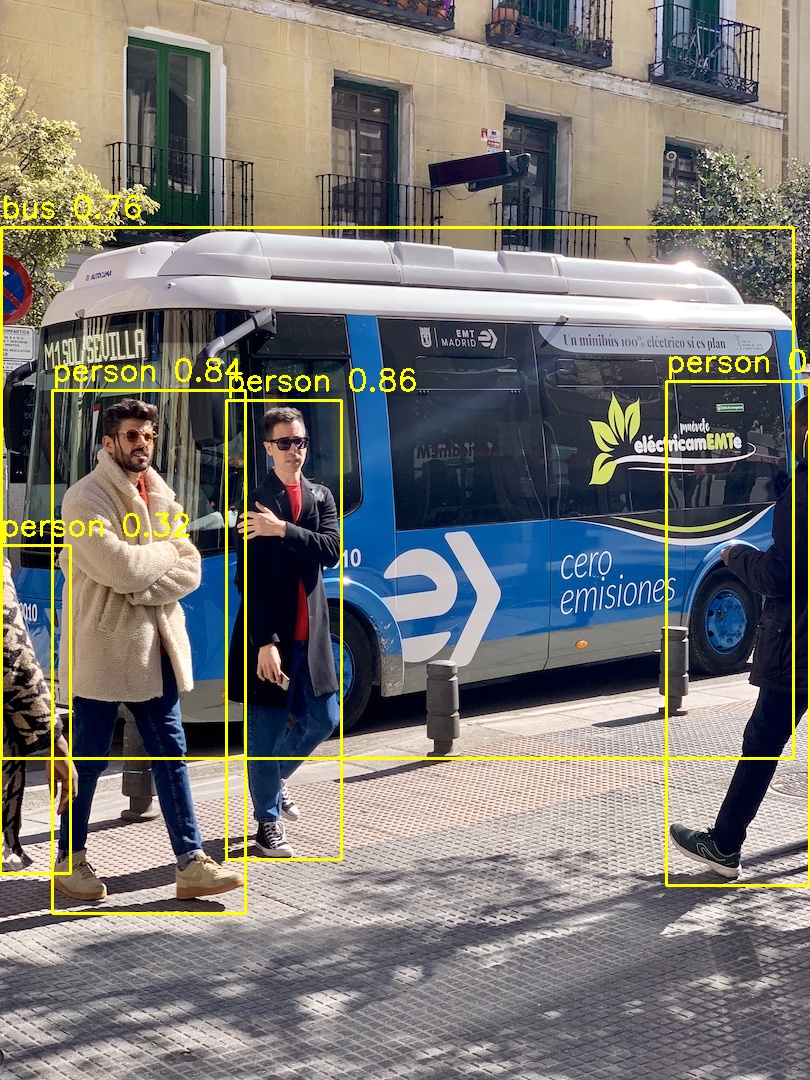
images/Result.jpg
0 → 100644
{kind=link}
487 KB
images/bus.jpg
0 → 100644
{kind=link}

476 KB
requirements.txt
0 → 100644
| opencv-contrib-python | ||
| numpy | ||
| os | ||
| argparse | ||
| time | ||
| \ No newline at end of file |
weights/coco.names
0 → 100644
weights/yolov5s.onnx
0 → 100644
File added