
精简代码
Showing
Doc/Tutorial_Cpp.md
0 → 100644
Doc/Tutorial_Python.md
0 → 100644
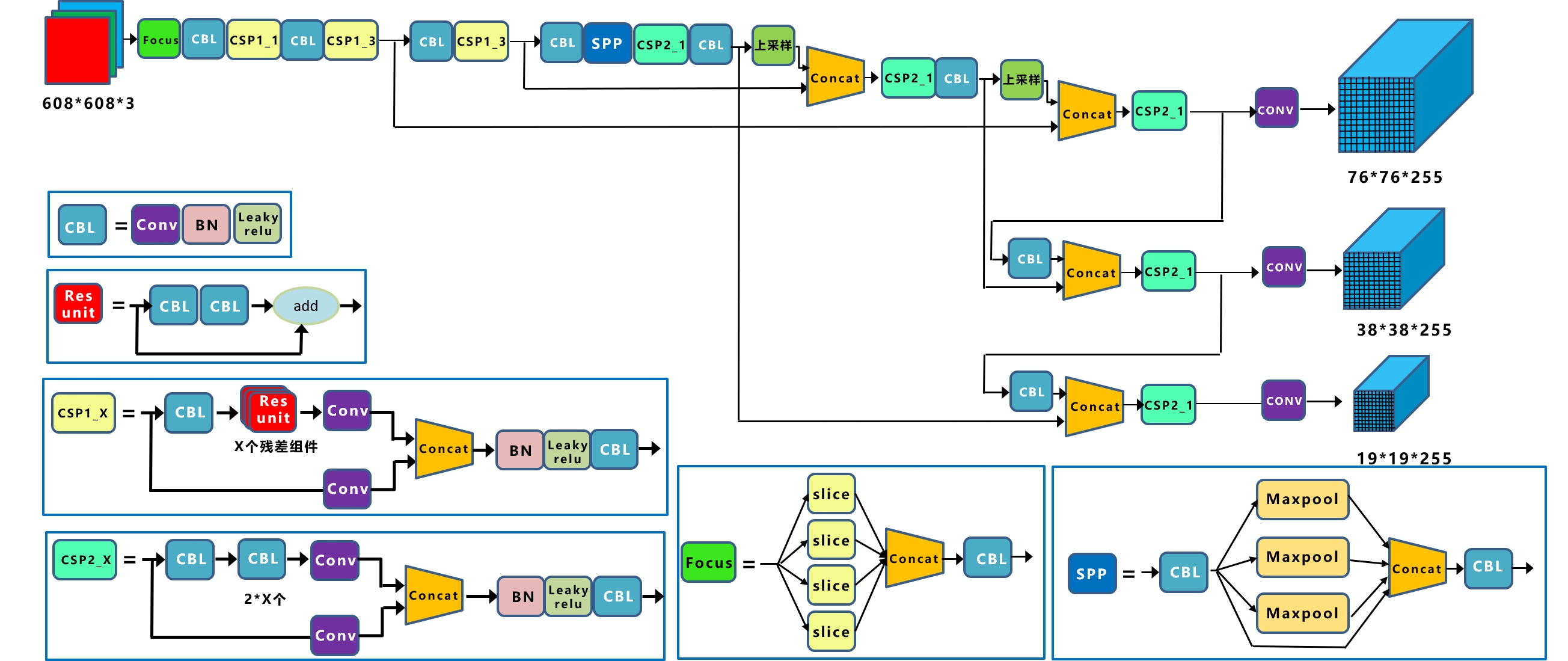
Doc/YOLOV5_01.jpg
0 → 100644
{kind=link}
571 KB
File moved
File moved
Src/Sample.cpp
deleted
100644 → 0
Src/Sample.h
deleted
100644 → 0