
提交yolov3 C++示例
Showing
.gitignore
0 → 100644
3rdParty/InstallRBuild.sh
0 → 100644
File added
File added
File added
File added
File added
File added
CMakeLists.txt
0 → 100644
Python/requirements.txt
0 → 100644
Resource/Configuration.xml
0 → 100644
{kind=link}
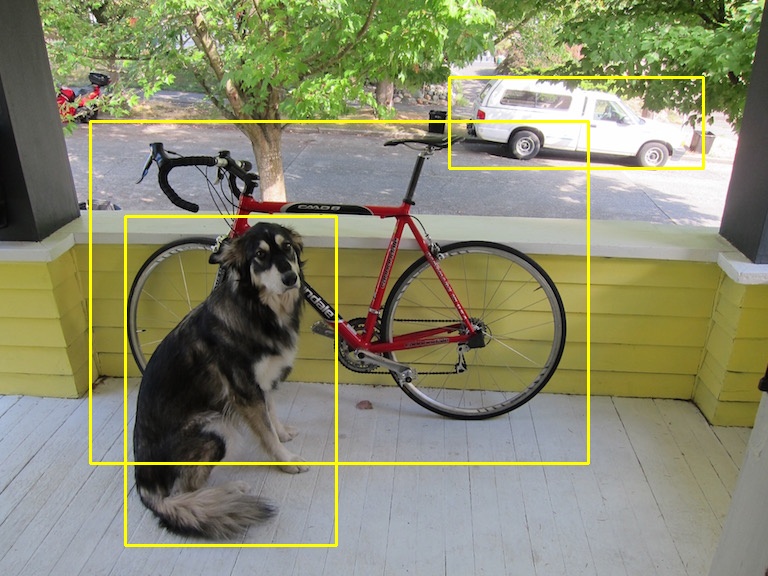
Resource/Images/Result_2.jpg
0 → 100644
{kind=link}
181 KB
{kind=link}
File moved