
提交ViT代码
Showing
.gitignore
0 → 100644
LICENSE
0 → 100644
README.md
0 → 100644
Vit-README.md
0 → 100644
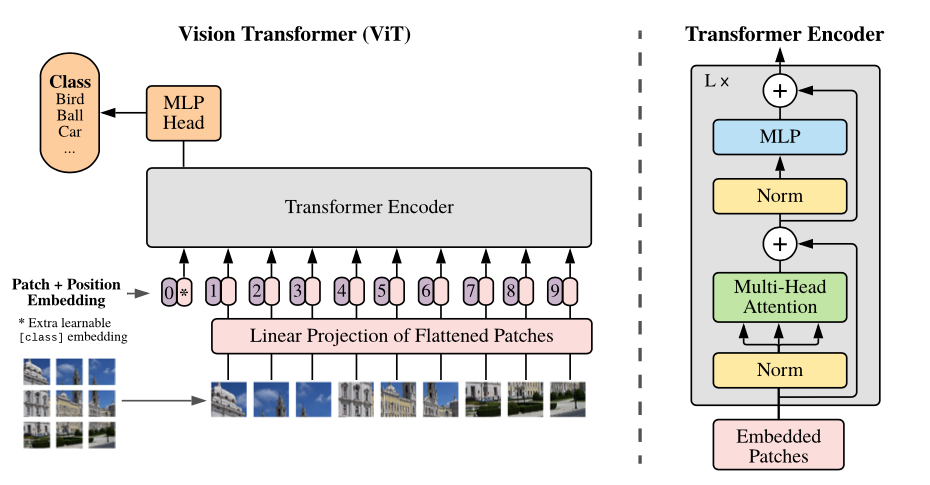
img/figure1.png
0 → 100644
{kind=link}
127 KB
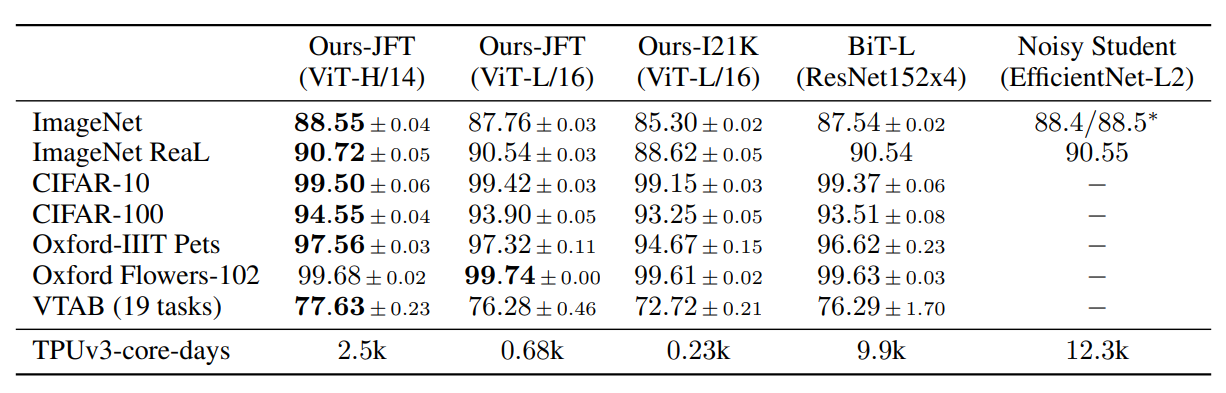
img/figure2.png
0 → 100644
{kind=link}
137 KB
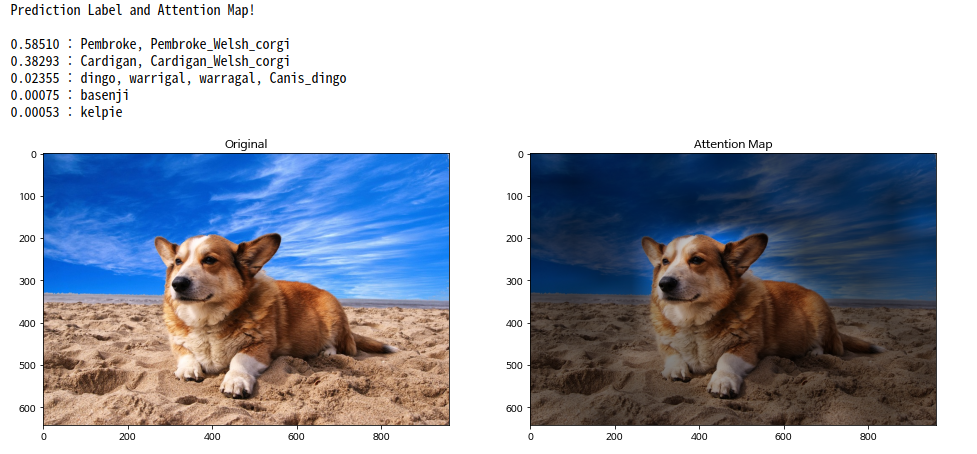
img/figure3.png
0 → 100644
{kind=link}
430 KB
logs-z100.txt
0 → 100644
File added
File added
File added
File added
File added
File added
File added
File added
File added
File added
File added
File added