
Update
Signed-off-by:  lijian <lijian6@sugon.com>
lijian <lijian6@sugon.com>
Showing
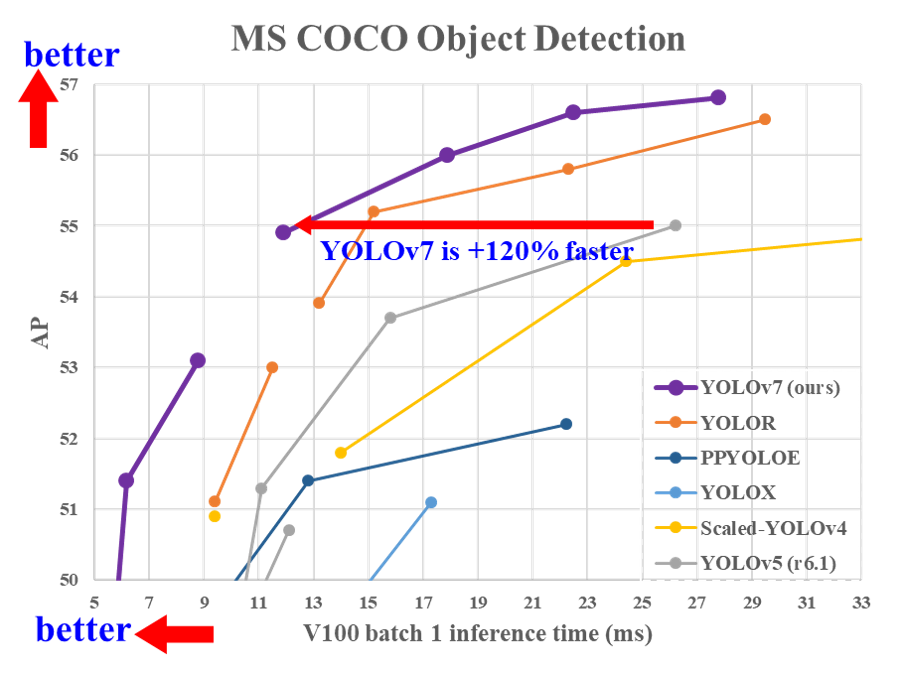
Doc/YOLOV7_01.png
0 → 100644
{kind=link}
165 KB
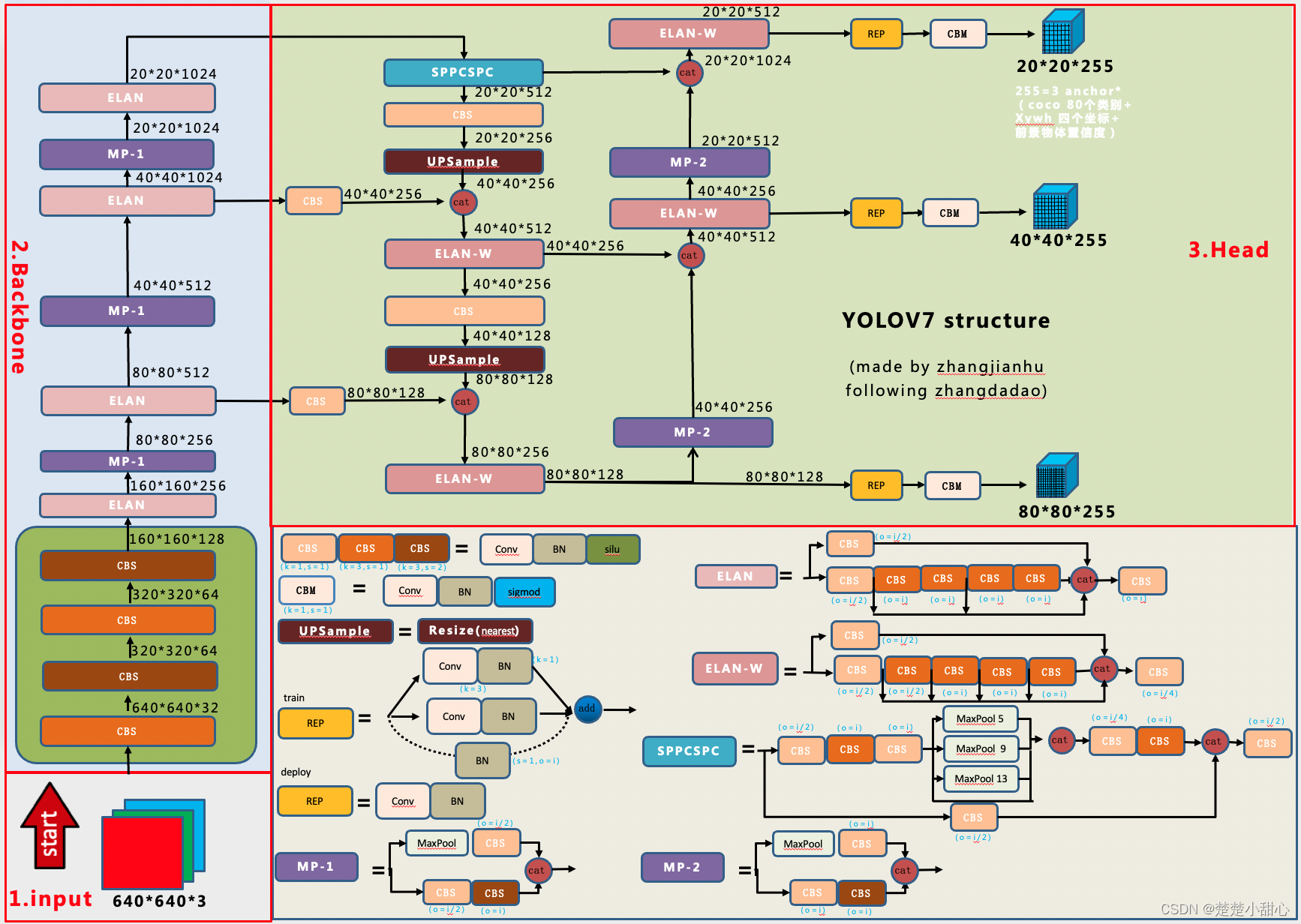
Doc/YoloV7_model.png
0 → 100644
{kind=link}
2.17 MB
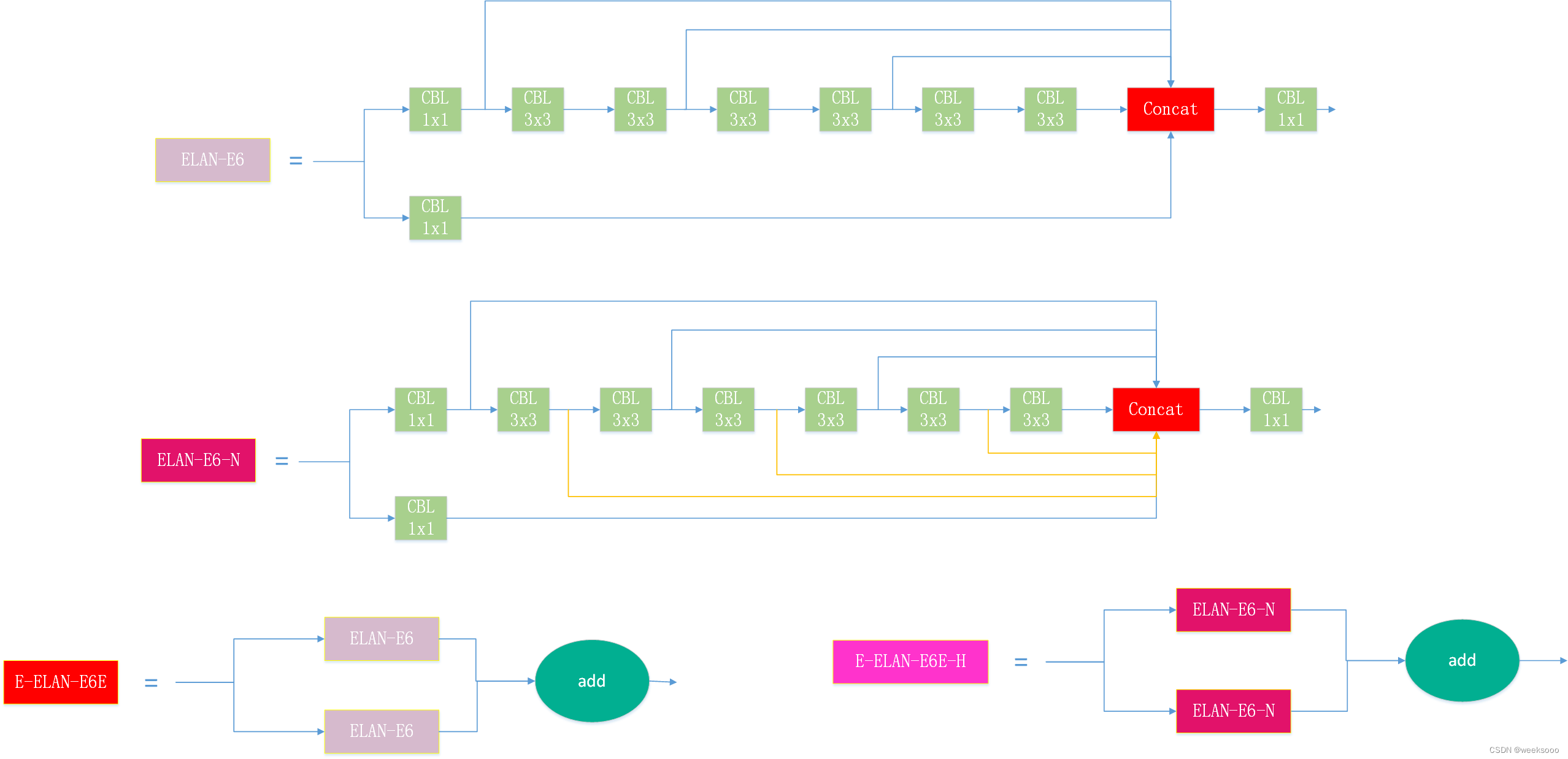
Doc/YoloV7_suanfa.png
0 → 100644
{kind=link}
90.6 KB
Doc/image.gif
0 → 100644
{kind=link}

7.66 MB
README.md
100755 → 100644
docker/Dockerfile
0 → 100644