
init
parents
Showing
LICENSE
0 → 100644
README.md
0 → 100644
README_origin.md
0 → 100644
assets/MOT-BDD.png
0 → 100644
{kind=link}

63.5 KB
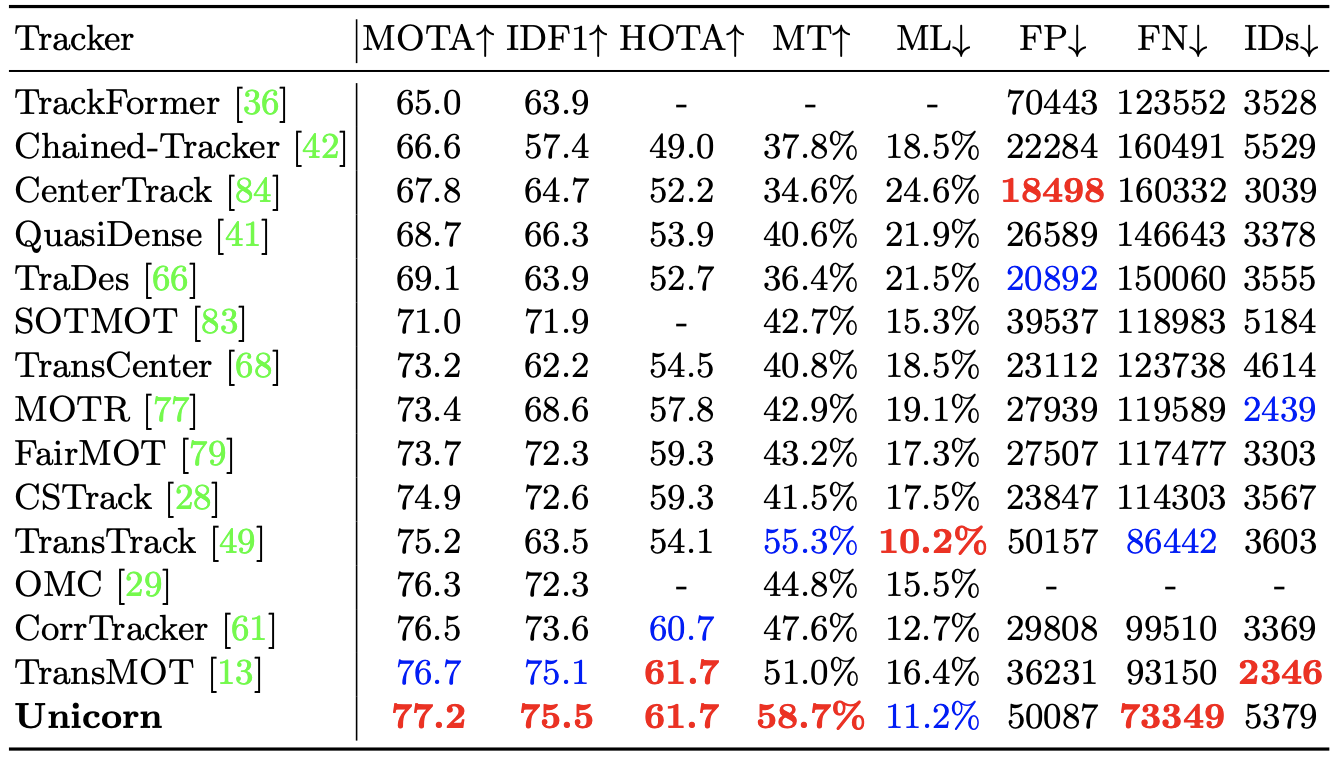
assets/MOT.png
0 → 100644
{kind=link}
236 KB
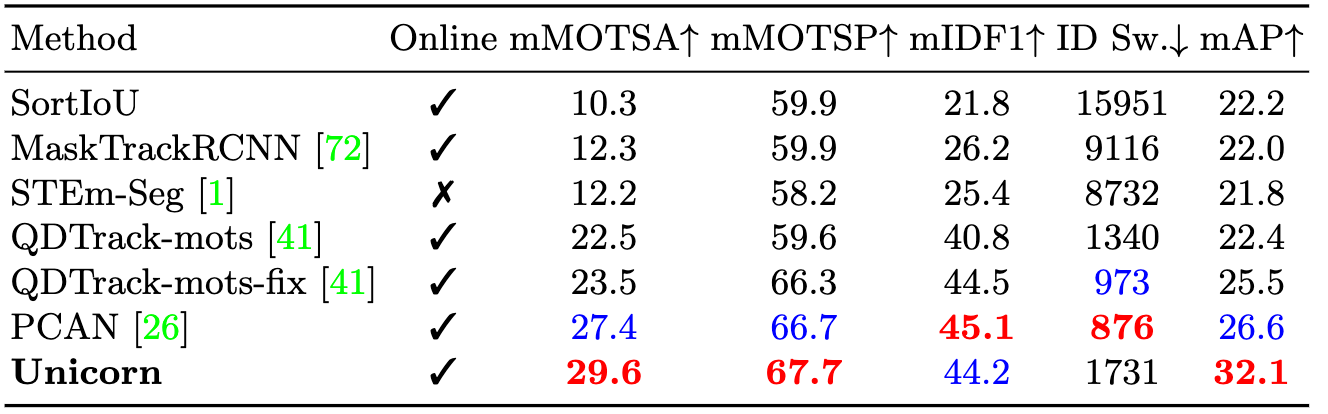
assets/MOTS-BDD.png
0 → 100644
{kind=link}
101 KB
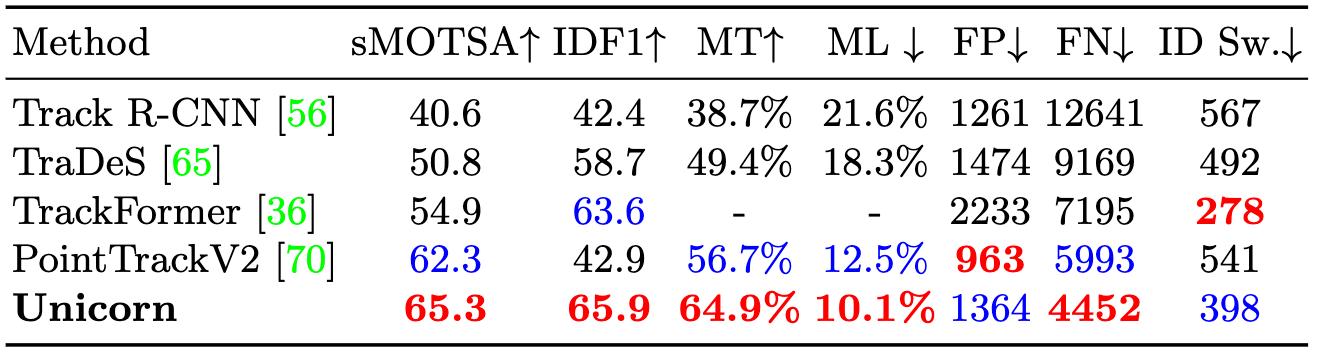
assets/MOTS.png
0 → 100644
{kind=link}
101 KB
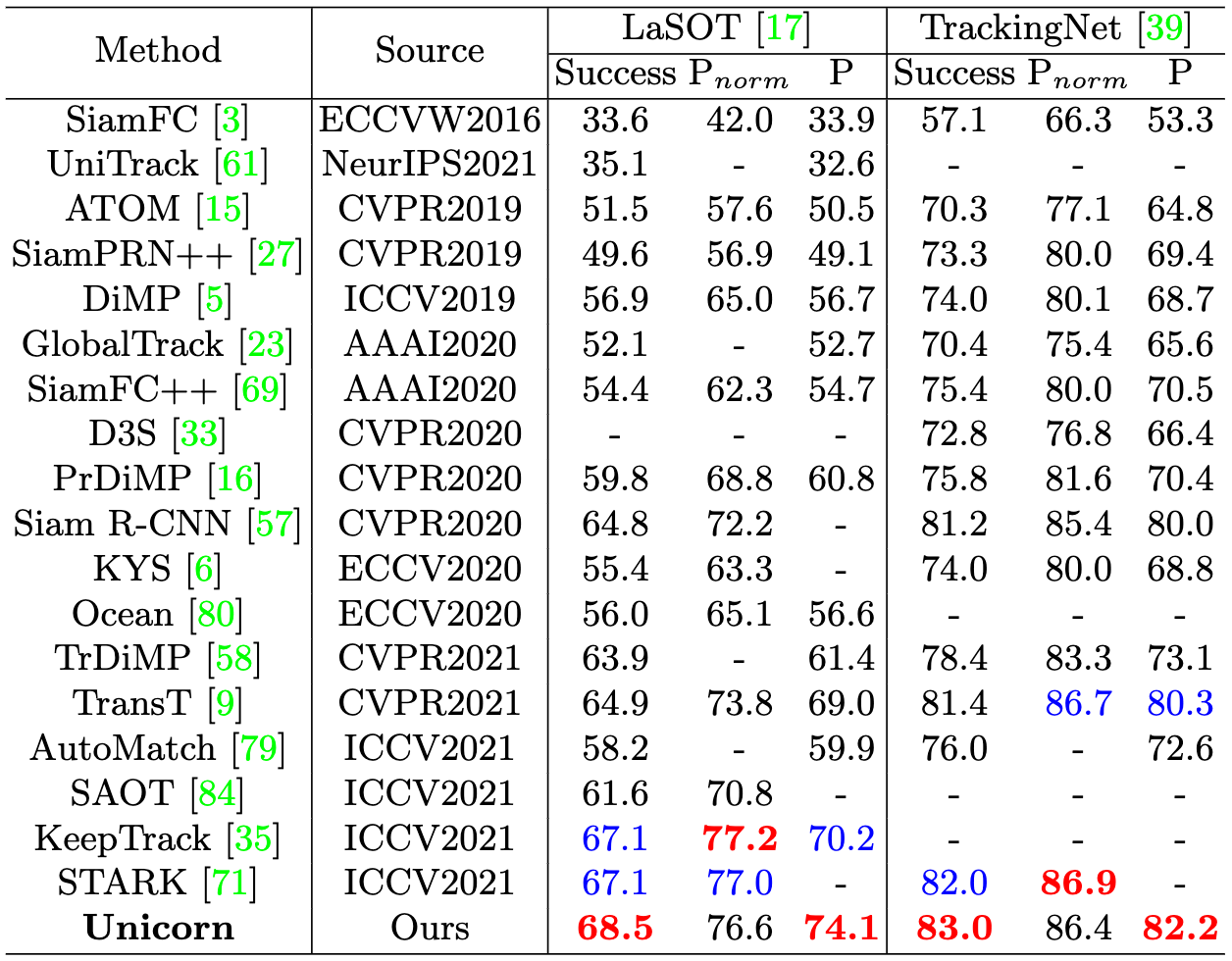
assets/SOT.png
0 → 100644
{kind=link}
294 KB
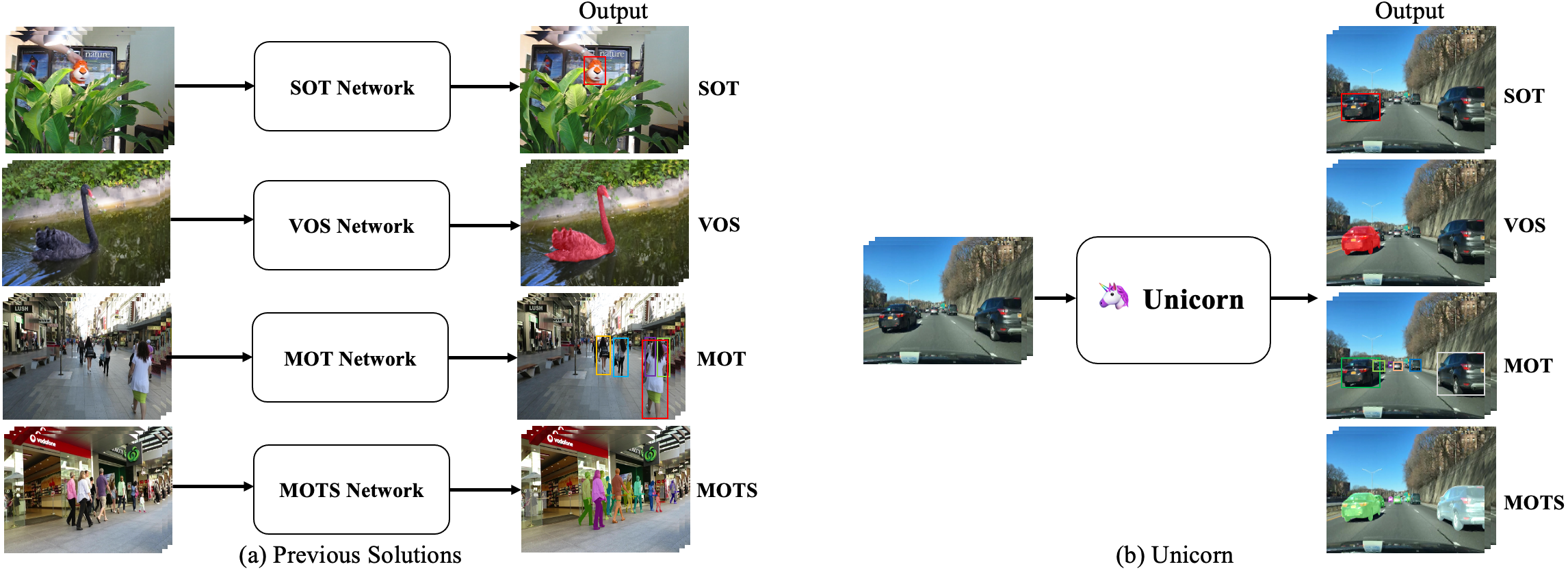
assets/Unicorn.png
0 → 100644
{kind=link}
1.47 MB
assets/VOS.png
0 → 100644
{kind=link}
209 KB
assets/data.md
0 → 100644
assets/install.md
0 → 100644
assets/model_zoo.md
0 → 100644
assets/test.md
0 → 100644
assets/train.md
0 → 100644
assets/video_demo.gif
0 → 100644
{kind=link}
This image diff could not be displayed because it is too large. You can view the blob instead.
datasets/GOT10K
0 → 120000
This diff is collapsed.
datasets/data_path/eth.train
0 → 100644
This diff is collapsed.
doc/Unicorn_components.png
0 → 100644
{kind=link}

164 KB