
modify readme
Showing
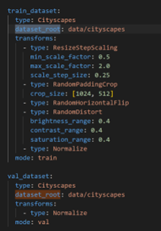
data.png
0 → 100644
{kind=link}
30.3 KB
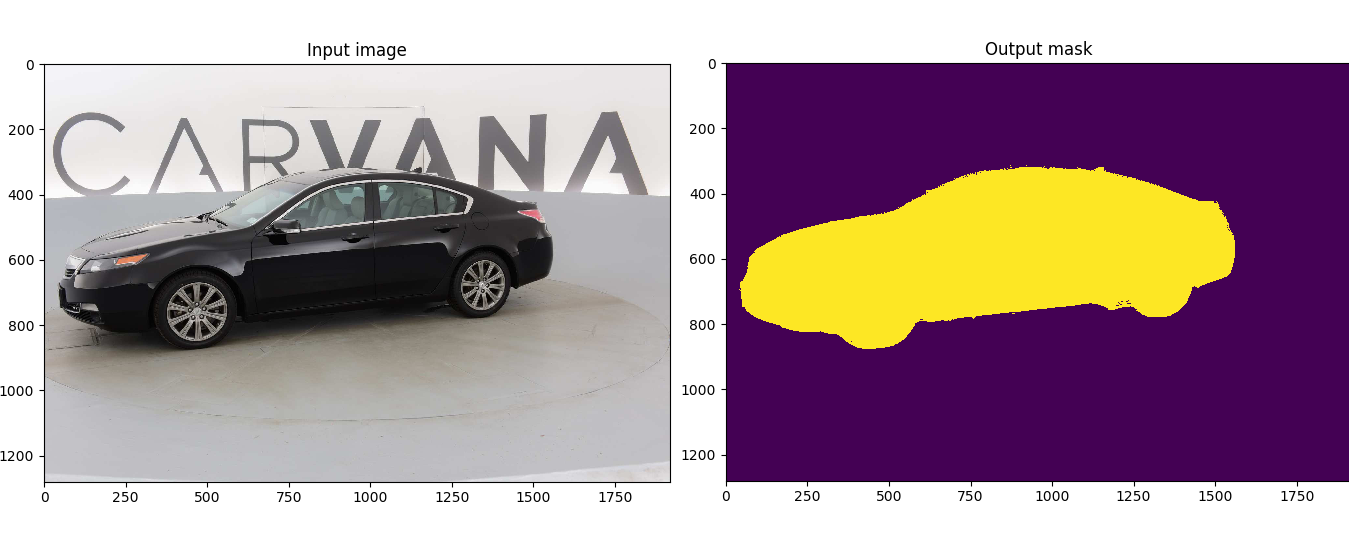
result.png
0 → 100644
{kind=link}
185 KB
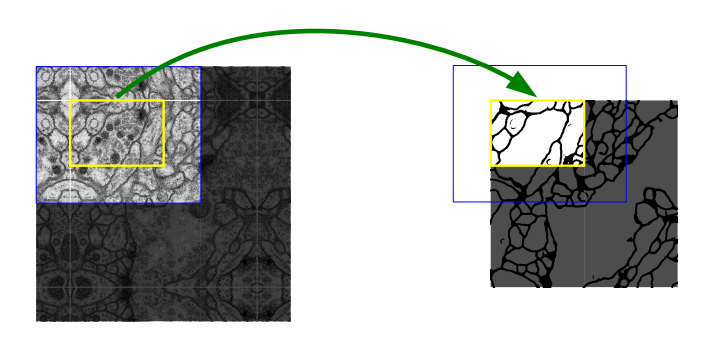
unet.png
0 → 100644
{kind=link}
146 KB
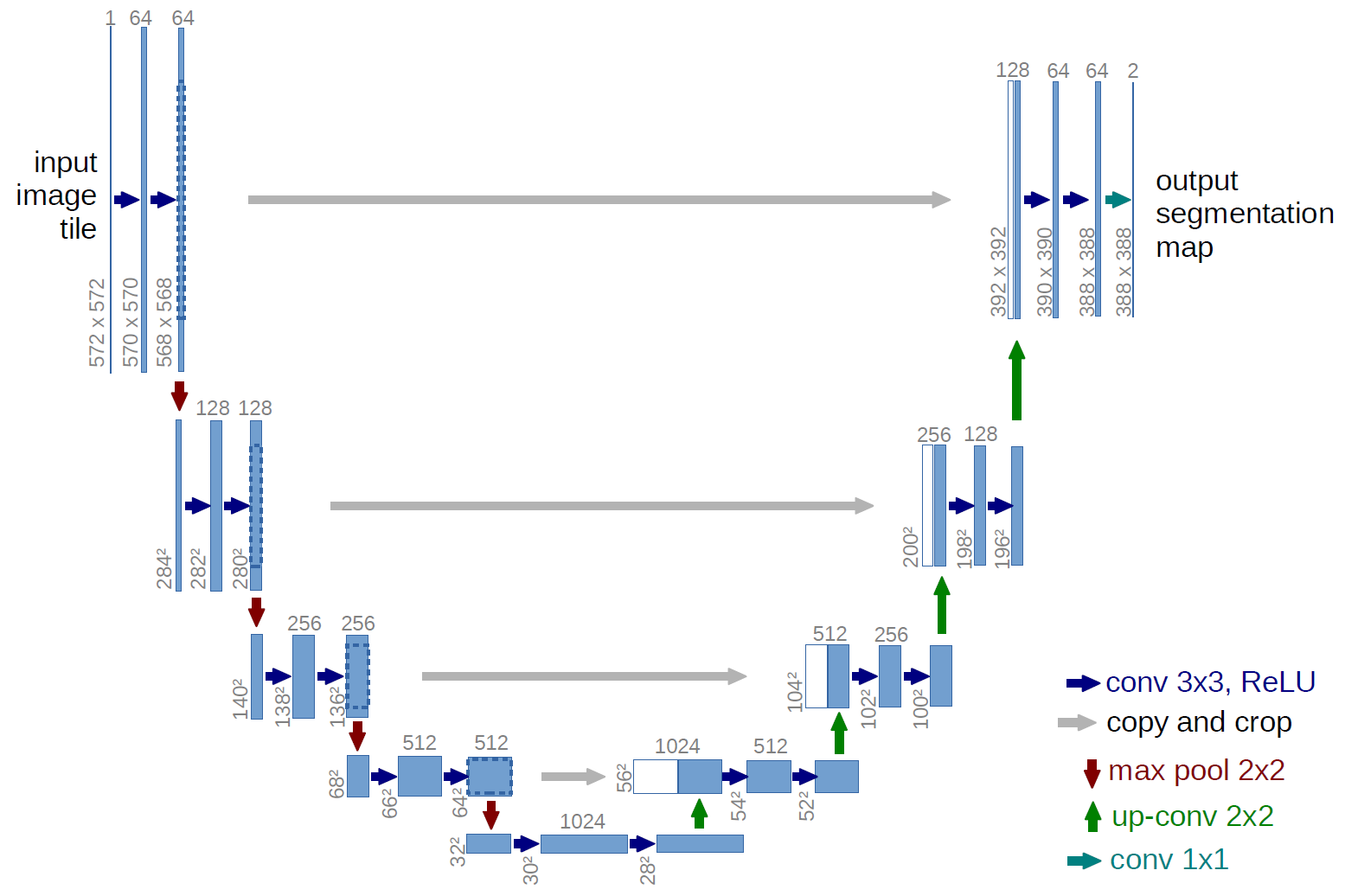
unet_architecture.png
0 → 100644
{kind=link}
101 KB
30.3 KB
185 KB
146 KB
101 KB