
Initial commit
Showing
.gitignore
0 → 100644
LICENSE
0 → 100644
README.md
0 → 100644
README_orgin.md
0 → 100644
api/call_remote_server.py
0 → 100644
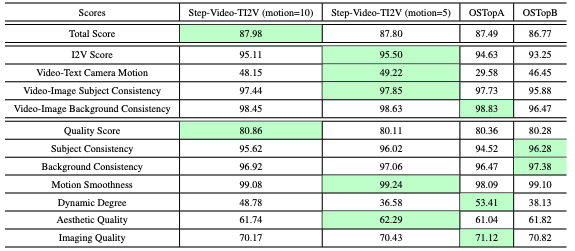
assets/compare_1.png
0 → 100644
{kind=link}
43.7 KB
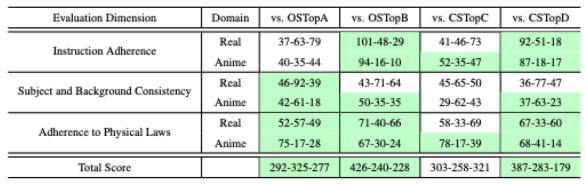
assets/compare_2.png
0 → 100644
{kind=link}
53.6 KB
assets/demo.png
0 → 100644
{kind=link}

4.71 MB
assets/logo.png
0 → 100644
{kind=link}
6.71 KB
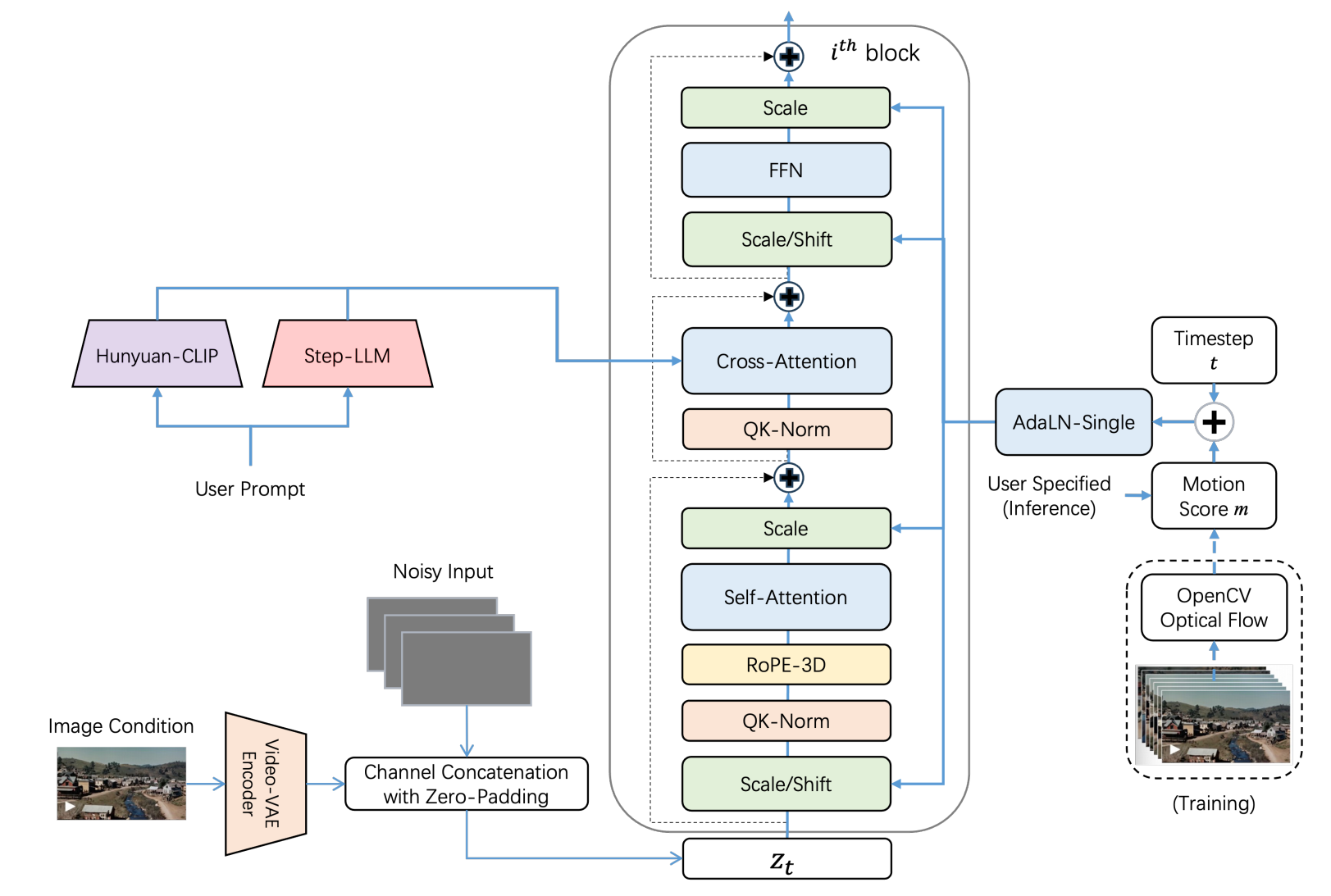
assets/model.png
0 → 100644
{kind=link}
266 KB
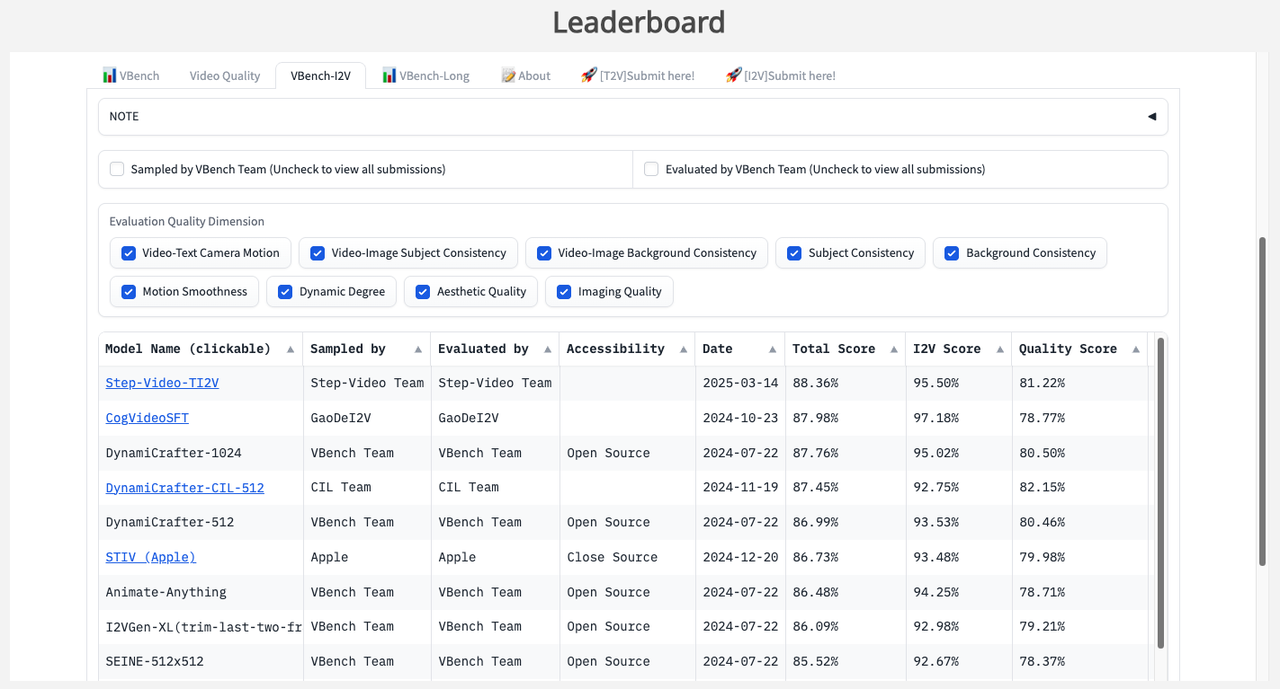
assets/vbench.png
0 → 100644
{kind=link}
258 KB
assets/笑起来-2025-05-13.mp4
0 → 100644
File added
docker/Dockerfile
0 → 100644
fix.sh
0 → 100644
icon.png
0 → 100644
{kind=link}
70.5 KB
model.properties
0 → 100644
modified/config.py
0 → 100644
modified/envs.py
0 → 100644
run.sh
0 → 100644
run_parallel.py
0 → 100644