"""Overwrite model.train with this function to make sure train/eval mode
does not change anymore."""
returnself
defget_string_from_tuple(s):
try:
# Check if the string starts and ends with parentheses
ifs[0]=="("ands[-1]==")":
# Convert the string to a tuple
t=eval(s)
# Check if the type of t is tuple
iftype(t)==tuple:
returnt[0]
else:
pass
except:
pass
returns
defis_power_of_two(n):
"""
chat.openai.com/chat
Return True if n is a power of 2, otherwise return False.
The function is_power_of_two takes an integer n as input and returns True if n is a power of 2, otherwise it returns False.
The function works by first checking if n is less than or equal to 0. If n is less than or equal to 0, it can't be a power of 2, so the function returns False.
If n is greater than 0, the function checks whether n is a power of 2 by using a bitwise AND operation between n and n-1. If n is a power of 2, then it will have only one bit set to 1 in its binary representation. When we subtract 1 from a power of 2, all the bits to the right of that bit become 1, and the bit itself becomes 0. So, when we perform a bitwise AND between n and n-1, we get 0 if n is a power of 2, and a non-zero value otherwise.
Thus, if the result of the bitwise AND operation is 0, then n is a power of 2 and the function returns True. Otherwise, the function returns False.
"""Overwrite model.train with this function to make sure train/eval mode
does not change anymore."""
returnself
defget_string_from_tuple(s):
try:
# Check if the string starts and ends with parentheses
ifs[0]=="("ands[-1]==")":
# Convert the string to a tuple
t=eval(s)
# Check if the type of t is tuple
iftype(t)==tuple:
returnt[0]
else:
pass
except:
pass
returns
defis_power_of_two(n):
"""
chat.openai.com/chat
Return True if n is a power of 2, otherwise return False.
The function is_power_of_two takes an integer n as input and returns True if n is a power of 2, otherwise it returns False.
The function works by first checking if n is less than or equal to 0. If n is less than or equal to 0, it can't be a power of 2, so the function returns False.
If n is greater than 0, the function checks whether n is a power of 2 by using a bitwise AND operation between n and n-1. If n is a power of 2, then it will have only one bit set to 1 in its binary representation. When we subtract 1 from a power of 2, all the bits to the right of that bit become 1, and the bit itself becomes 0. So, when we perform a bitwise AND between n and n-1, we get 0 if n is a power of 2, and a non-zero value otherwise.
Thus, if the result of the bitwise AND operation is 0, then n is a power of 2 and the function returns True. Otherwise, the function returns False.
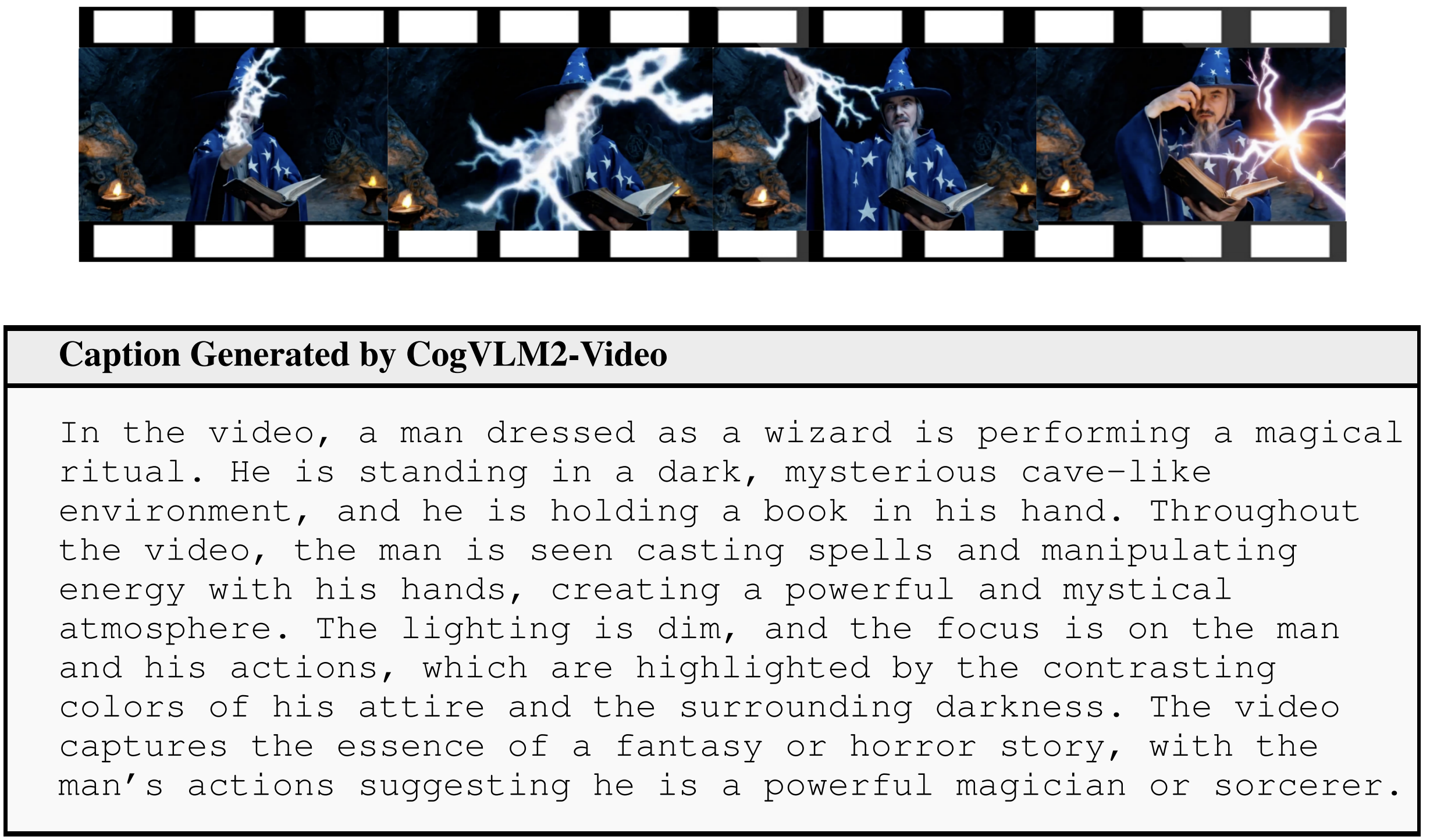
Users can use the provided [code](https://github.com/THUDM/CogVLM2/tree/main/video_demo) to load the model or configure a RESTful API to generate video captions.

{kind=link}