
Initial commit
Showing
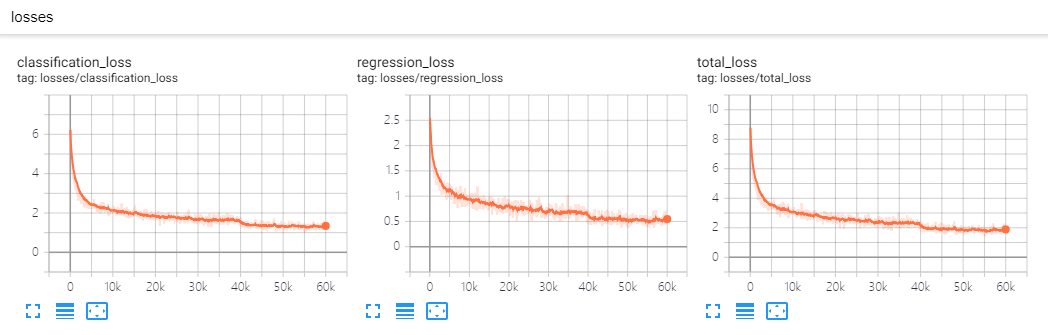
figures/losses.png
0 → 100644
{kind=link}
39.1 KB
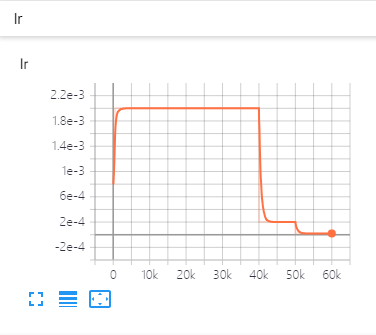
figures/lr.png
0 → 100644
{kind=link}
13.2 KB
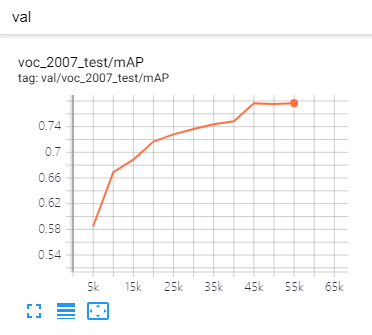
figures/metrics.png
0 → 100644
{kind=link}
16.2 KB
outputs/.gitignore
0 → 100644
requirements.txt
0 → 100644
| torch>=1.3 | ||
| torchvision>=0.3 | ||
| yacs | ||
| tqdm | ||
| opencv-python | ||
| vizer | ||
| \ No newline at end of file |
setup.py
0 → 100644
ssd/__init__.py
0 → 100644
ssd/config/__init__.py
0 → 100644
ssd/config/defaults.py
0 → 100644
ssd/config/path_catlog.py
0 → 100644
ssd/data/__init__.py
0 → 100644
ssd/data/build.py
0 → 100644
ssd/data/datasets/coco.py
0 → 100644
ssd/data/datasets/voc.py
0 → 100644