
Initial commit
Showing
export_to_onnx.py
0 → 100644
export_to_torchscript.py
0 → 100644
figs/.DS_Store
0 → 100644
File added
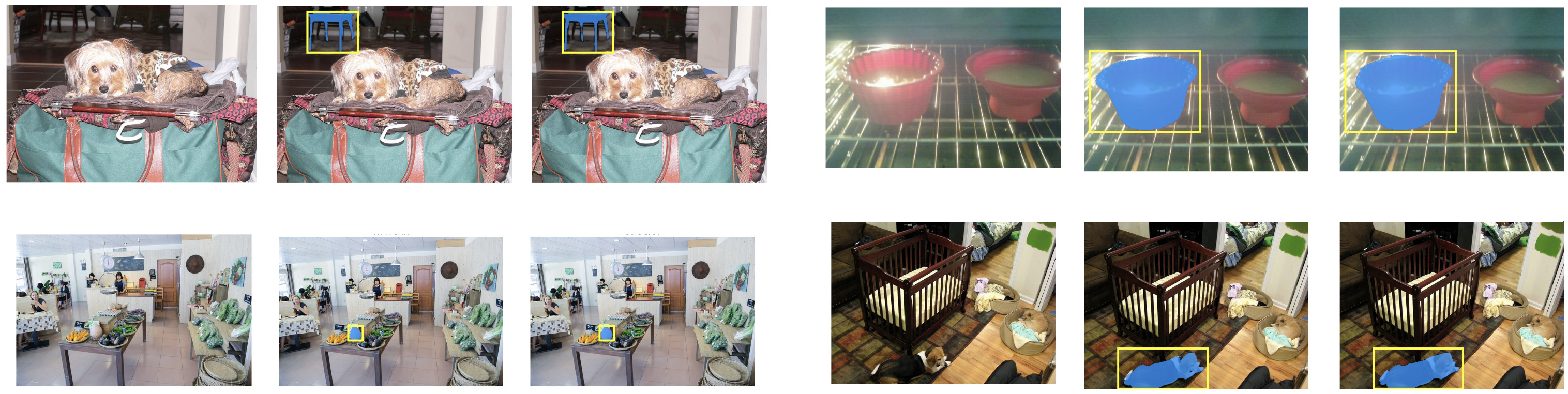
figs/examples/demo_box.png
0 → 100644
{kind=link}
3.41 MB
{kind=link}

2.93 MB
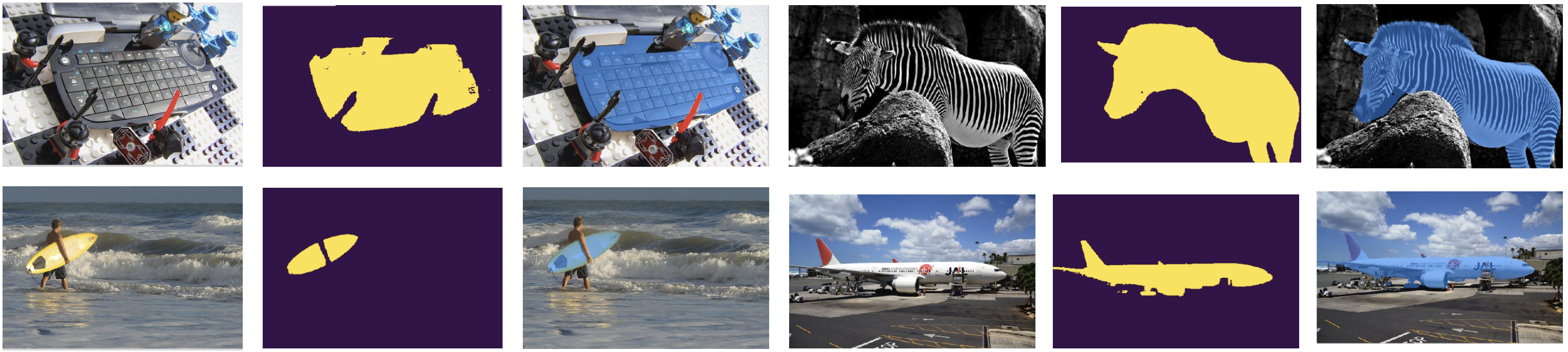
figs/examples/demo_point.png
0 → 100644
{kind=link}

4.81 MB
{kind=link}
2.43 MB
figs/examples/dogs.jpg
0 → 100644
{kind=link}

438 KB
{kind=link}

175 KB
{kind=link}

178 KB
{kind=link}

175 KB
{kind=link}

178 KB
{kind=link}

177 KB
inference_box_prompt.py
0 → 100644
inference_point_prompt.py
0 → 100644
linter.sh
0 → 100644
model.properties
0 → 100644
This diff is collapsed.