"vscode:/vscode.git/clone" did not exist on "1b7c791d60629453030de1600e756a8ba555455e"

update readme & add run_img.py
Showing
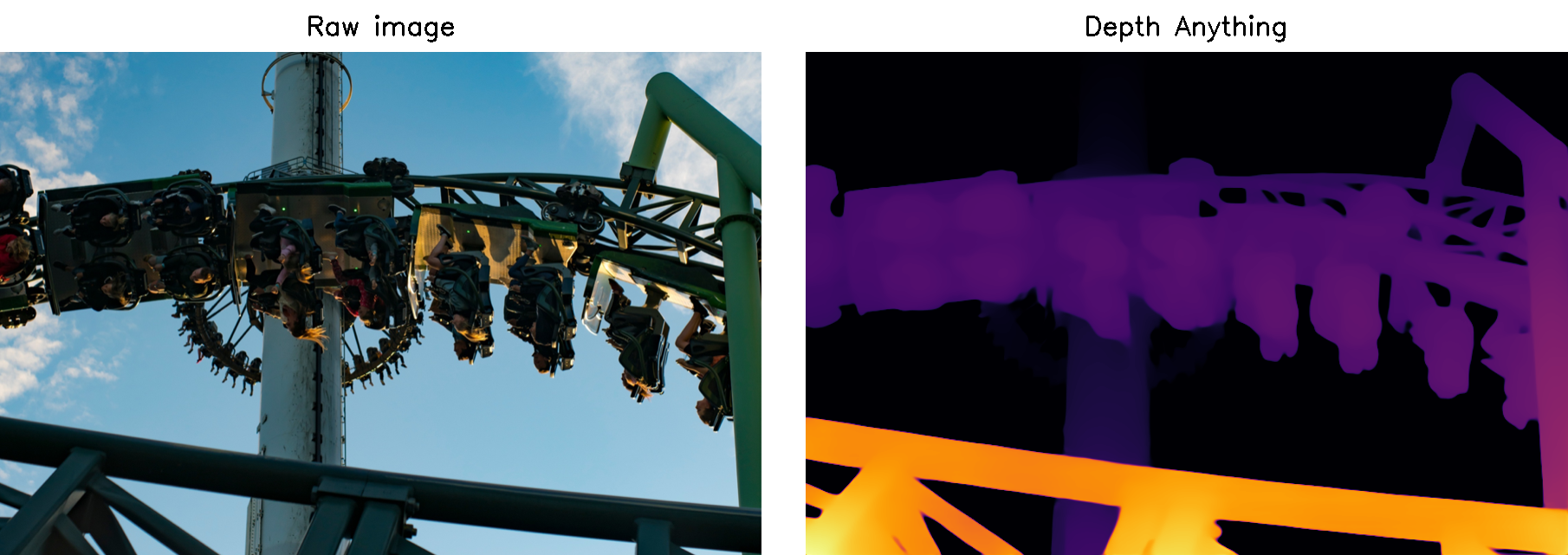
doc/demo1_img_depth.png
0 → 100644
{kind=link}
888 KB
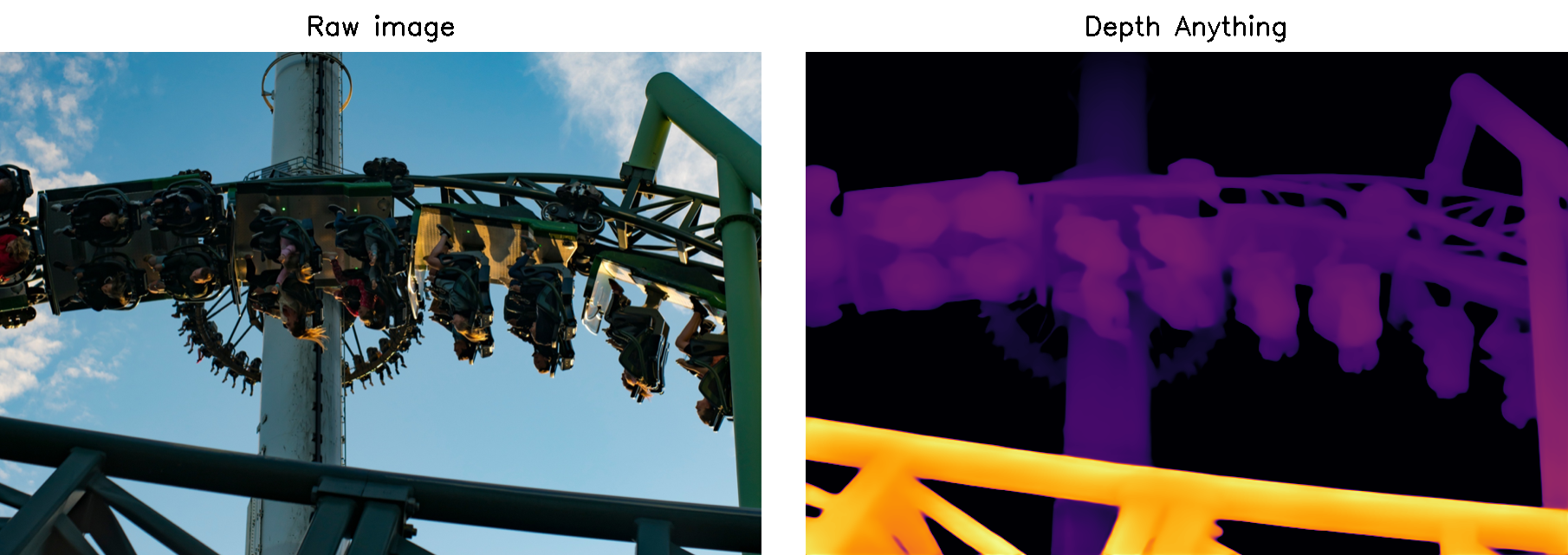
doc/demo1_img_depth_dcu.png
0 → 100644
{kind=link}
955 KB
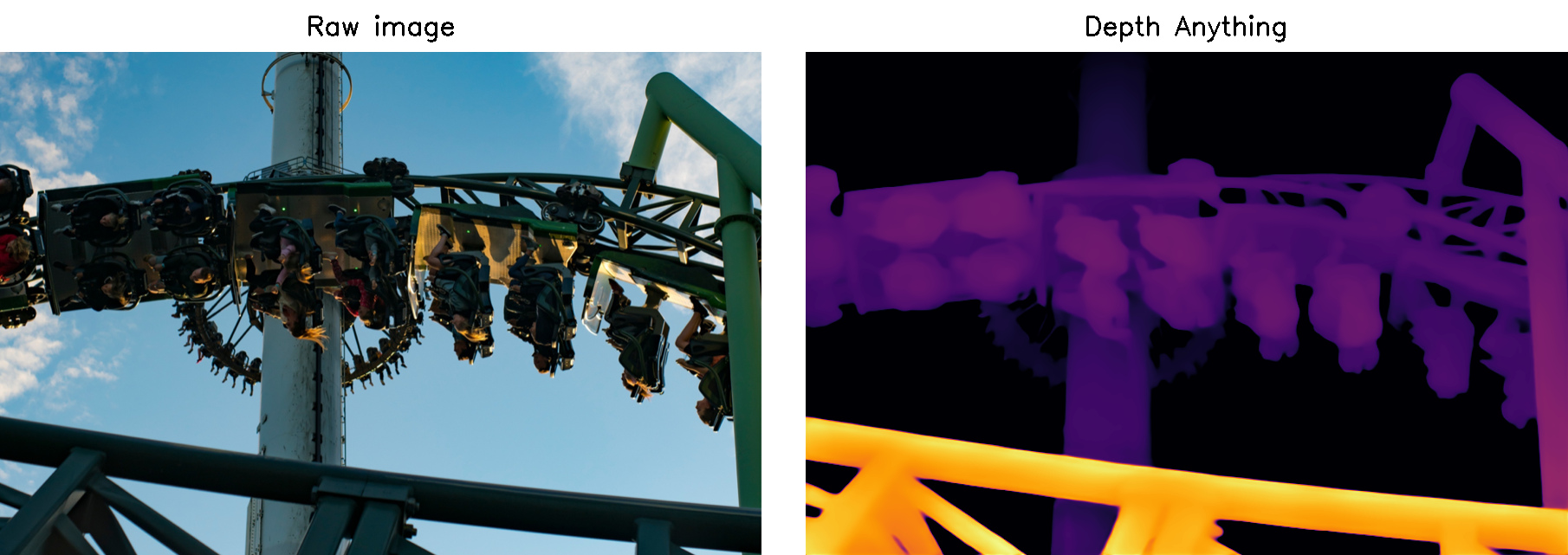
doc/demo1_img_depth_gpu.png
0 → 100644
{kind=link}
953 KB
doc/test1.png
deleted
100644 → 0
{kind=link}
547 KB
run_img.py
0 → 100644