
update
parents
Showing
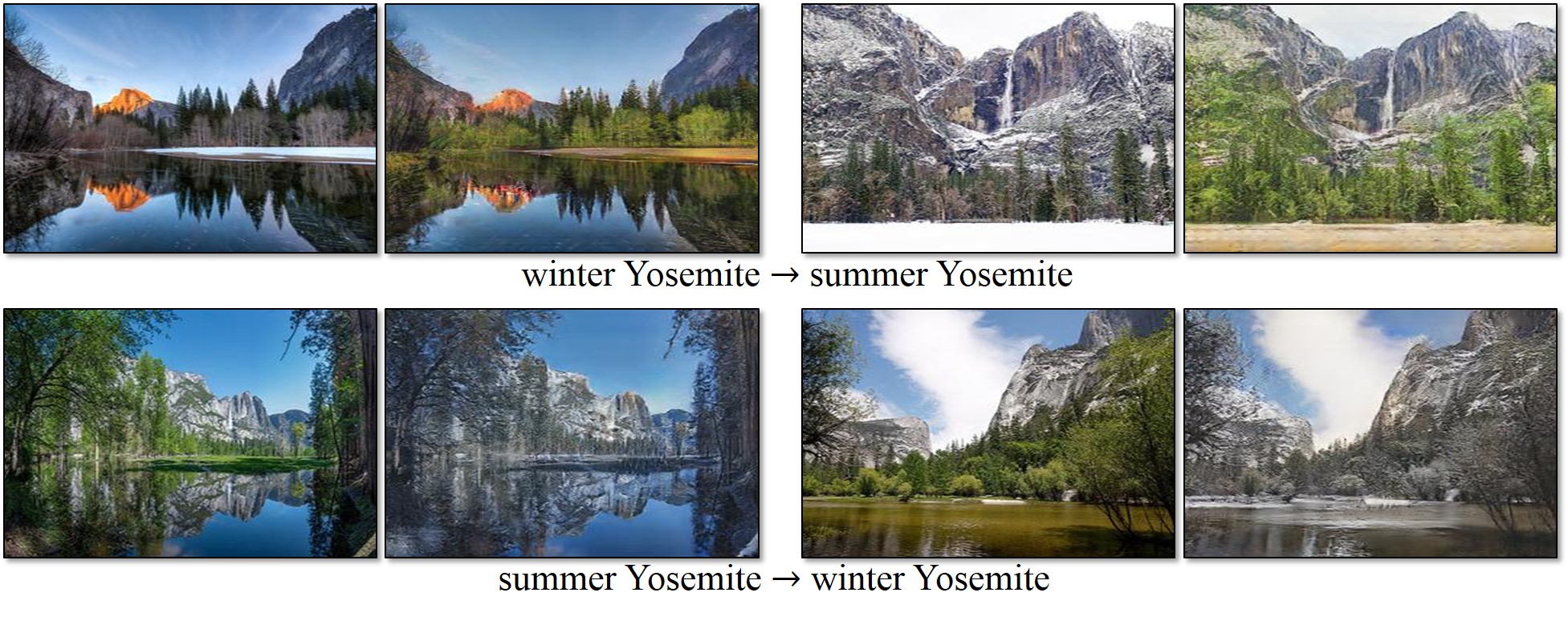
imgs/season.jpg
0 → 100644
{kind=link}
407 KB
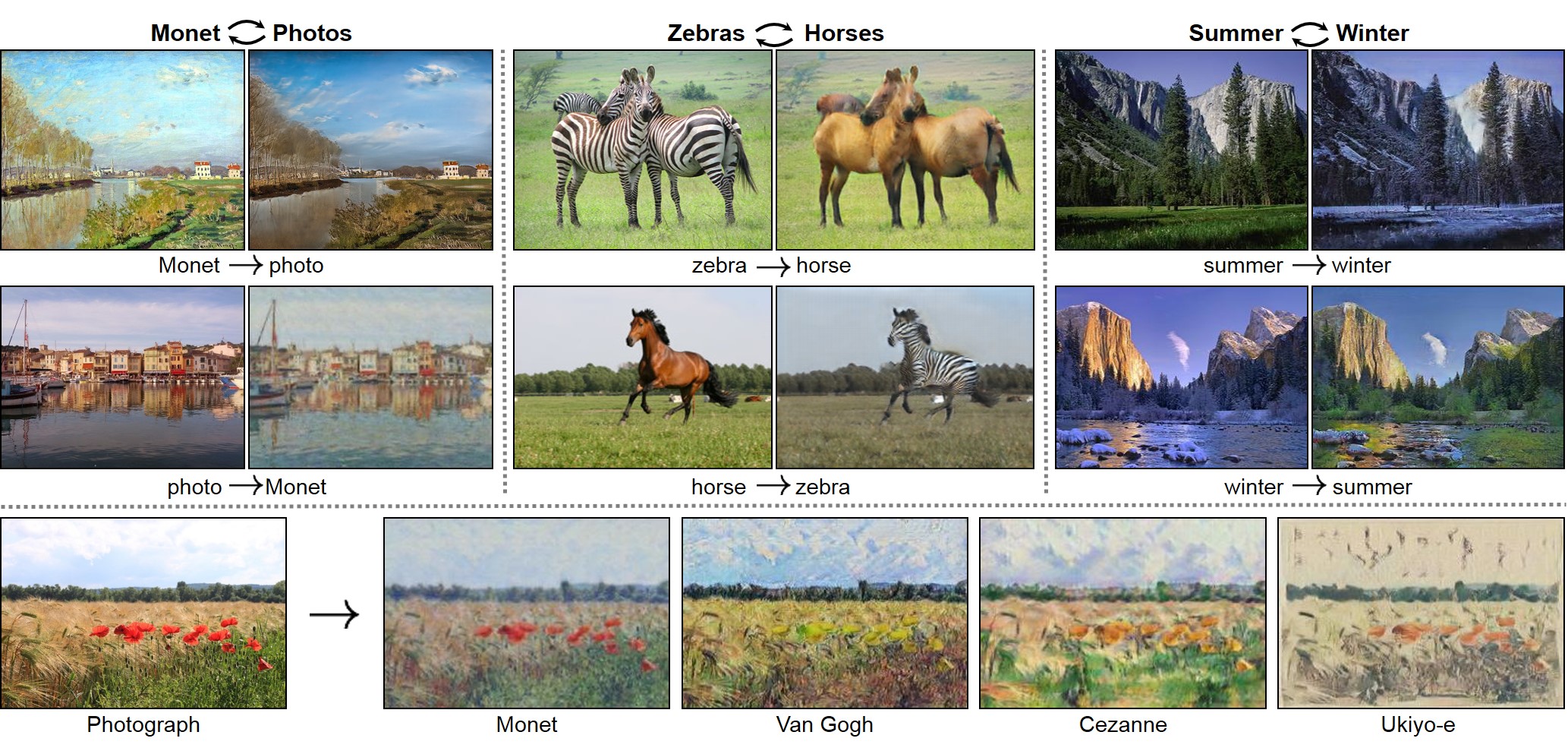
imgs/teaser.jpg
0 → 100644
{kind=link}
554 KB
model.properties
0 → 100644
models/architectures.lua
0 → 100644
models/base_model.lua
0 → 100644
models/bigan_model.lua
0 → 100644
models/content_gan_model.lua
0 → 100644
models/cycle_gan_model.lua
0 → 100644
models/pix2pix_model.lua
0 → 100644
options.lua
0 → 100644
test.lua
0 → 100644
train.lua
0 → 100644
util/VGG_preprocess.lua
0 → 100644
util/content_loss.lua
0 → 100644