
First commit
Showing
.gitignore
0 → 100644
LICENSE
0 → 100644
README.md
0 → 100644
d2/README.md
0 → 100644
d2/converter.py
0 → 100644
d2/detr/__init__.py
0 → 100644
d2/detr/config.py
0 → 100644
d2/detr/dataset_mapper.py
0 → 100644
d2/detr/detr.py
0 → 100644
d2/train_net.py
0 → 100644
datasets/__init__.py
0 → 100644
datasets/coco.py
0 → 100644
datasets/coco_eval.py
0 → 100644
datasets/coco_panoptic.py
0 → 100644
datasets/panoptic_eval.py
0 → 100644
datasets/transforms.py
0 → 100644
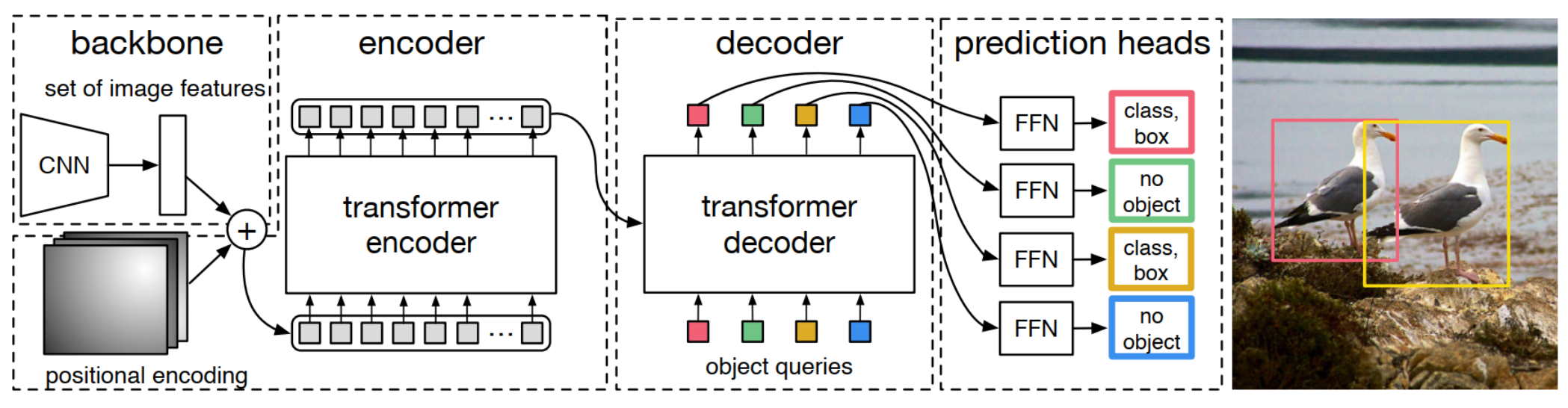
doc/DETR.png
0 → 100644
{kind=link}

172 KB
doc/models.png
0 → 100644
{kind=link}
661 KB