
init
Showing
.gitignore
0 → 100644
100_epoch.py
0 → 100644
LICENSE
0 → 100644
check_soruce.py
0 → 100644
docs/can_bus.ipynb
0 → 100644
docs/getting_started.md
0 → 100644
docs/install.md
0 → 100644
docs/prepare_dataset.md
0 → 100644
figs/arch.png
0 → 100644
{kind=link}
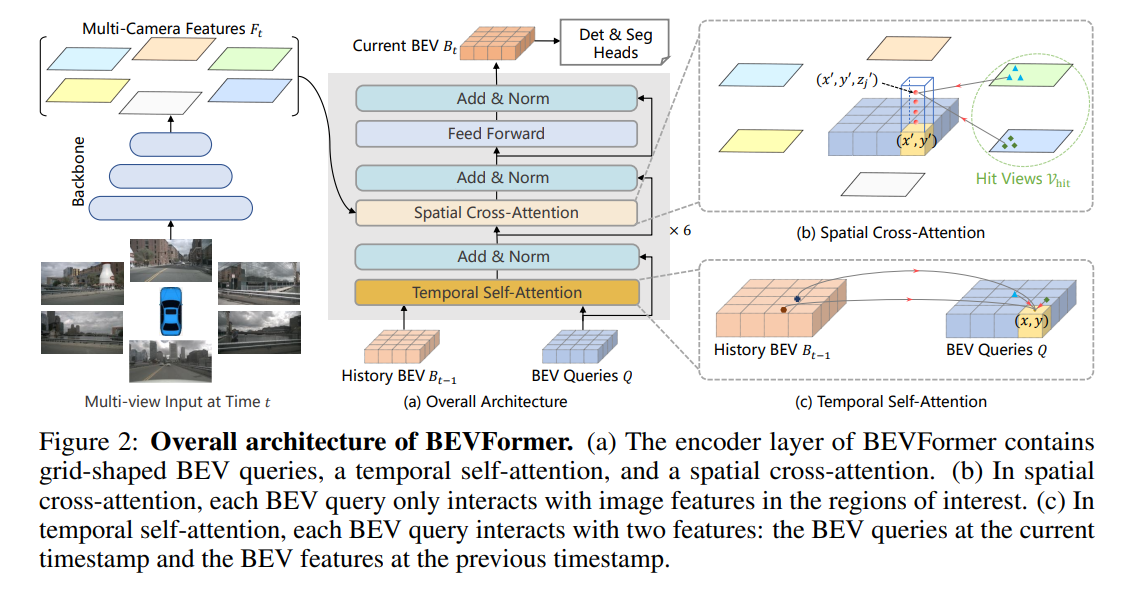
260 KB
figs/sota_results.png
0 → 100644
{kind=link}
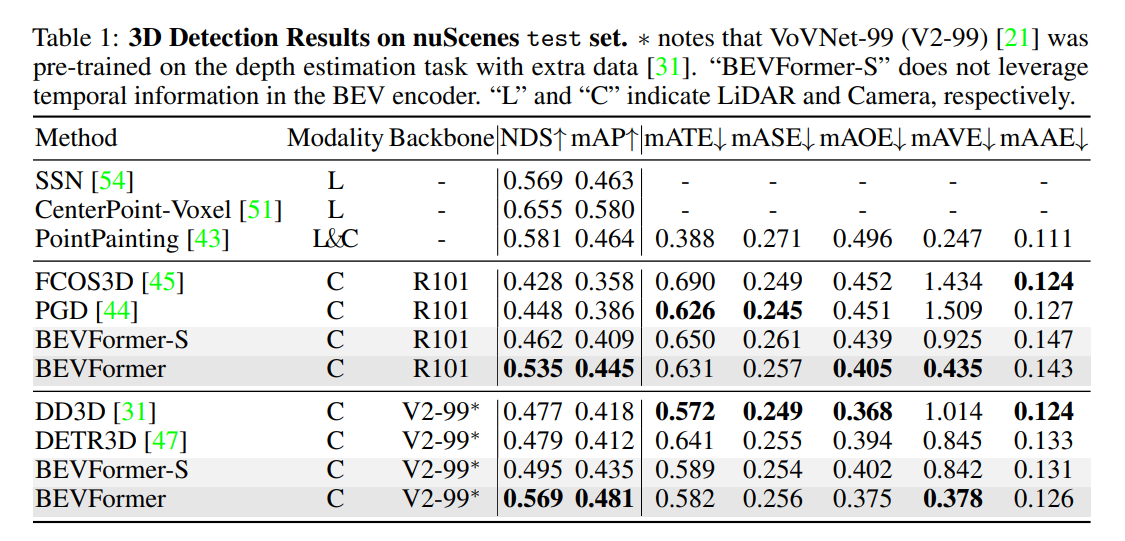
200 KB
projects/__init__.py
0 → 100644