# YOLOv8
## 论文
无
## 模型结构
YOLOv8是一种单阶段目标检测算法,该算法在YOLOV5的基础上添加了一些新的改进思路,使其速度与精度都得到了极大的性能提升。
 ## 算法原理
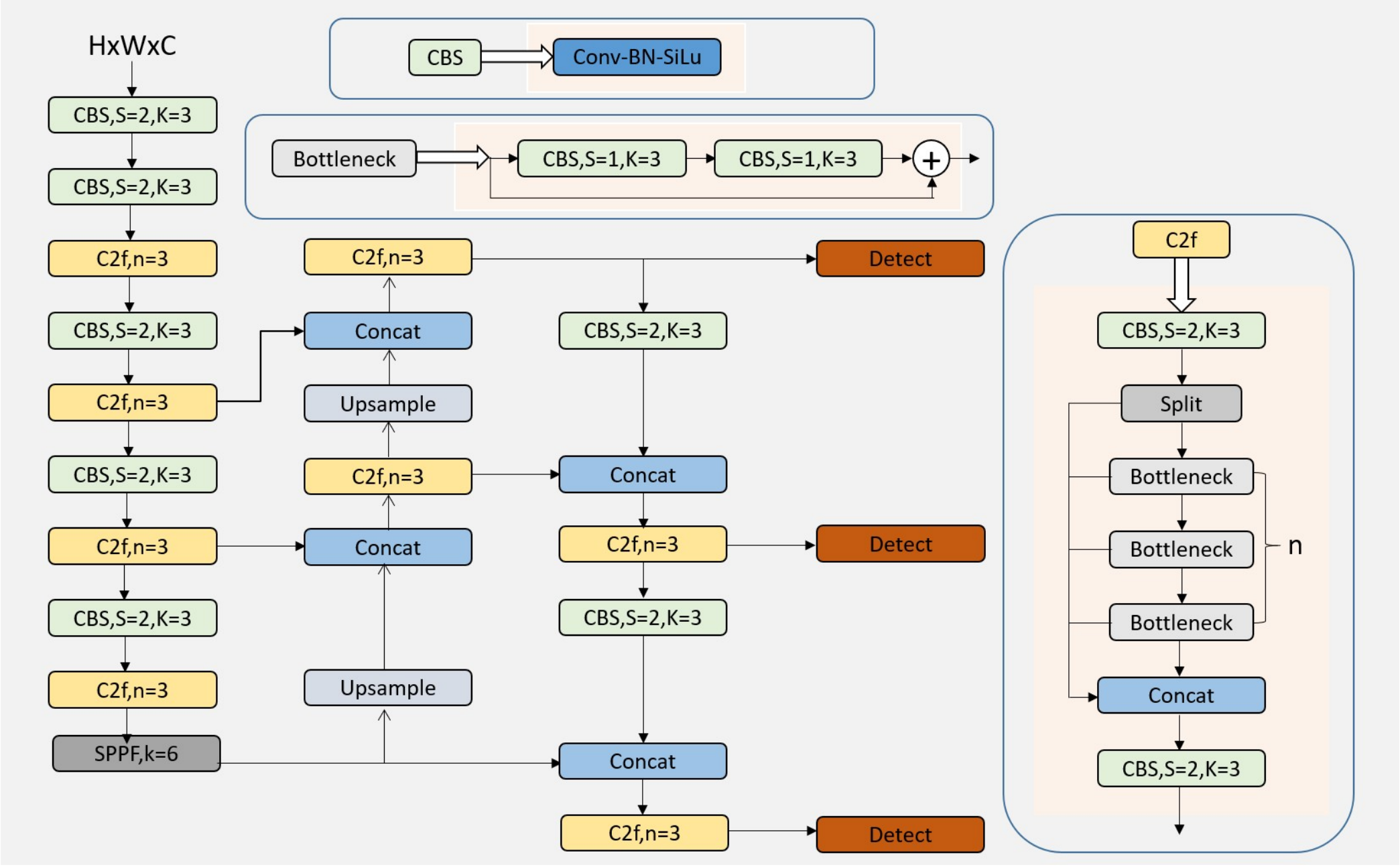
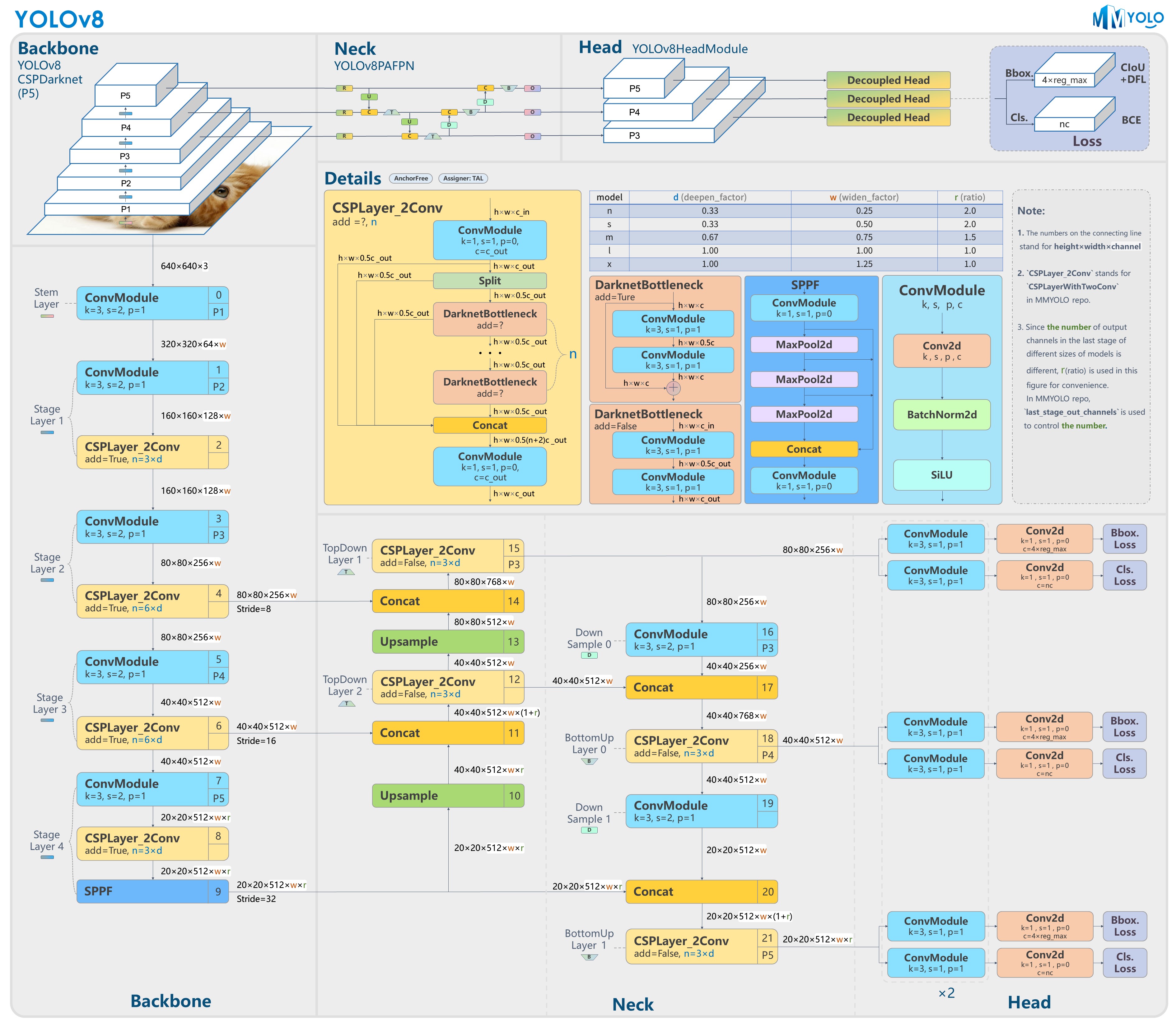
YOLOv8算法通过将图像划分为不同大小的网格,预测每个网格中的目标类别和边界框,利用特征金字塔结构和自适应的模型缩放来实现高效准确的实时目标检测。
- 骨干网络和 Neck 部分将 YOLOv5 的 C3 结构换成了梯度流更丰富的 C2f 结构,并对不同尺度模型调整了不同的通道数,大幅提升了模型性能。
- Head 部分相比 YOLOv5 改动较大,换成了目前主流的解耦头结构,将分类和检测头分离,同时也从 Anchor-Based 换成了 Anchor-Free.
- Loss 计算方面采用了 TaskAlignedAssigner 正样本分配策略,并引入了 Distribution Focal Loss.
- 训练的数据增强部分引入了 YOLOX 中的最后 10 epoch 关闭 Mosiac 增强的操作,可以有效地提升精度
## 算法原理
YOLOv8算法通过将图像划分为不同大小的网格,预测每个网格中的目标类别和边界框,利用特征金字塔结构和自适应的模型缩放来实现高效准确的实时目标检测。
- 骨干网络和 Neck 部分将 YOLOv5 的 C3 结构换成了梯度流更丰富的 C2f 结构,并对不同尺度模型调整了不同的通道数,大幅提升了模型性能。
- Head 部分相比 YOLOv5 改动较大,换成了目前主流的解耦头结构,将分类和检测头分离,同时也从 Anchor-Based 换成了 Anchor-Free.
- Loss 计算方面采用了 TaskAlignedAssigner 正样本分配策略,并引入了 Distribution Focal Loss.
- 训练的数据增强部分引入了 YOLOX 中的最后 10 epoch 关闭 Mosiac 增强的操作,可以有效地提升精度
 ## 环境配置
### Docker(方法一)
拉取镜像:
```shell
docker pull image.sourcefind.cn:5000/dcu/admin/base/migraphx:4.3.0-ubuntu20.04-dtk24.04.1-py3.10
```
创建并启动容器:
```shell
docker run --shm-size 16g --network=host --name=yolov8_migraphx --privileged --device=/dev/kfd --device=/dev/dri --group-add video --cap-add=SYS_PTRACE --security-opt seccomp=unconfined -v /opt/hyhal:/opt/hyhal:ro -v $PWD/yolov8_migraphx:/home/yolov8_migraphx -it /bin/bash
# 激活dtk
source /opt/dtk/env.sh
```
### Dockerfile(方法二)
```shell
cd ./docker
docker build --no-cache -t yolov8_migraphx:2.0 .
docker run --shm-size 16g --network=host --name=yolov8_migraphx --privileged --device=/dev/kfd --device=/dev/dri --group-add video --cap-add=SYS_PTRACE --security-opt seccomp=unconfined -v /opt/hyhal:/opt/hyhal:ro -v $PWD/yolov8_migraphx:/home/yolov8_migraphx -it /bin/bash
# 激活dtk
source /opt/dtk/env.sh
```
## 数据集
根据提供的样本数据,进行目标检测。
## 推理
### Python版本推理
下面介绍如何运行Python代码示例,Python示例的详细说明见Doc目录下的Tutorial_Python.md。
#### 设置环境变量
```shell
export PYTHONPATH=/opt/dtk/lib:$PYTHONPATH
```
#### 安装依赖
```shell
# 进入python示例目录
cd /Python
# 安装依赖
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
```
#### 运行示例
YoloV8模型的推理示例程序是YoloV8_infer_migraphx.py,使用如下命令运行该推理示例:
1. 静态推理
```shell
python YoloV8_infer_migraphx.py --staticInfer
```
2. 动态推理
```shell
python YoloV8_infer_migraphx.py --dynamicInfer
```
### C++版本推理
注意:当使用操作系统不一样时,CMakeList需要做相应的修改:
```
# ubuntu操作系统
${CMAKE_CURRENT_SOURCE_DIR}/depend/lib64/ 修改为 ${CMAKE_CURRENT_SOURCE_DIR}/depend/lib/
# centos操作系统
${CMAKE_CURRENT_SOURCE_DIR}/depend/lib/ 修改为 ${CMAKE_CURRENT_SOURCE_DIR}/depend/lib64/
```
下面介绍如何运行C++代码示例,C++示例的详细说明见Doc目录下的Tutorial_Cpp.md。
#### 构建工程
```shell
rbuild build -d depend
```
#### 设置环境变量
将依赖库依赖加入环境变量LD_LIBRARY_PATH,在~/.bashrc中添加如下语句:
当操作系统是ubuntu系统时:
```shell
export LD_LIBRARY_PATH=/depend/lib/:$LD_LIBRARY_PATH
```
当操作系统是centos系统时:
```shell
export LD_LIBRARY_PATH=/depend/lib64/:$LD_LIBRARY_PATH
```
然后执行:
```shell
source ~/.bashrc
```
#### 运行示例
YoloV8示例程序编译成功后,执行如下指令运行该示例:
```shell
# 进入yolov8 migraphx工程根目录
cd
# 进入build目录
cd build/
```
1. 静态推理
```shell
./YOLOV8 0
```
2. 动态推理
```shell
./YOLOV8 1
```
## result
### Python版本
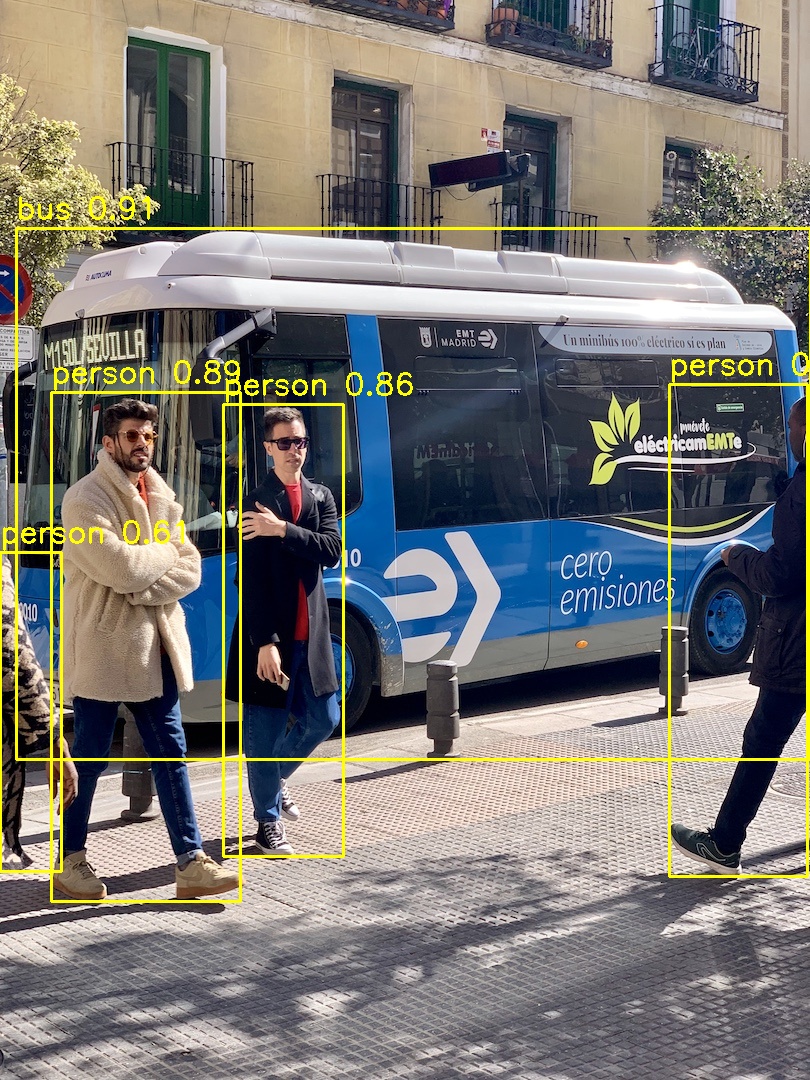
静态推理:
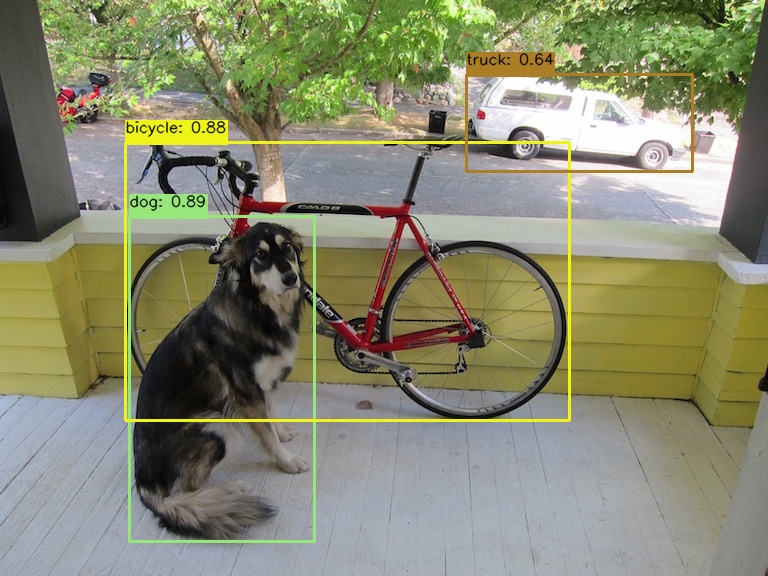
python程序运行结束后,会在当前目录生成YOLOV8静态推理检测结果可视化图像。
## 环境配置
### Docker(方法一)
拉取镜像:
```shell
docker pull image.sourcefind.cn:5000/dcu/admin/base/migraphx:4.3.0-ubuntu20.04-dtk24.04.1-py3.10
```
创建并启动容器:
```shell
docker run --shm-size 16g --network=host --name=yolov8_migraphx --privileged --device=/dev/kfd --device=/dev/dri --group-add video --cap-add=SYS_PTRACE --security-opt seccomp=unconfined -v /opt/hyhal:/opt/hyhal:ro -v $PWD/yolov8_migraphx:/home/yolov8_migraphx -it /bin/bash
# 激活dtk
source /opt/dtk/env.sh
```
### Dockerfile(方法二)
```shell
cd ./docker
docker build --no-cache -t yolov8_migraphx:2.0 .
docker run --shm-size 16g --network=host --name=yolov8_migraphx --privileged --device=/dev/kfd --device=/dev/dri --group-add video --cap-add=SYS_PTRACE --security-opt seccomp=unconfined -v /opt/hyhal:/opt/hyhal:ro -v $PWD/yolov8_migraphx:/home/yolov8_migraphx -it /bin/bash
# 激活dtk
source /opt/dtk/env.sh
```
## 数据集
根据提供的样本数据,进行目标检测。
## 推理
### Python版本推理
下面介绍如何运行Python代码示例,Python示例的详细说明见Doc目录下的Tutorial_Python.md。
#### 设置环境变量
```shell
export PYTHONPATH=/opt/dtk/lib:$PYTHONPATH
```
#### 安装依赖
```shell
# 进入python示例目录
cd /Python
# 安装依赖
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
```
#### 运行示例
YoloV8模型的推理示例程序是YoloV8_infer_migraphx.py,使用如下命令运行该推理示例:
1. 静态推理
```shell
python YoloV8_infer_migraphx.py --staticInfer
```
2. 动态推理
```shell
python YoloV8_infer_migraphx.py --dynamicInfer
```
### C++版本推理
注意:当使用操作系统不一样时,CMakeList需要做相应的修改:
```
# ubuntu操作系统
${CMAKE_CURRENT_SOURCE_DIR}/depend/lib64/ 修改为 ${CMAKE_CURRENT_SOURCE_DIR}/depend/lib/
# centos操作系统
${CMAKE_CURRENT_SOURCE_DIR}/depend/lib/ 修改为 ${CMAKE_CURRENT_SOURCE_DIR}/depend/lib64/
```
下面介绍如何运行C++代码示例,C++示例的详细说明见Doc目录下的Tutorial_Cpp.md。
#### 构建工程
```shell
rbuild build -d depend
```
#### 设置环境变量
将依赖库依赖加入环境变量LD_LIBRARY_PATH,在~/.bashrc中添加如下语句:
当操作系统是ubuntu系统时:
```shell
export LD_LIBRARY_PATH=/depend/lib/:$LD_LIBRARY_PATH
```
当操作系统是centos系统时:
```shell
export LD_LIBRARY_PATH=/depend/lib64/:$LD_LIBRARY_PATH
```
然后执行:
```shell
source ~/.bashrc
```
#### 运行示例
YoloV8示例程序编译成功后,执行如下指令运行该示例:
```shell
# 进入yolov8 migraphx工程根目录
cd
# 进入build目录
cd build/
```
1. 静态推理
```shell
./YOLOV8 0
```
2. 动态推理
```shell
./YOLOV8 1
```
## result
### Python版本
静态推理:
python程序运行结束后,会在当前目录生成YOLOV8静态推理检测结果可视化图像。
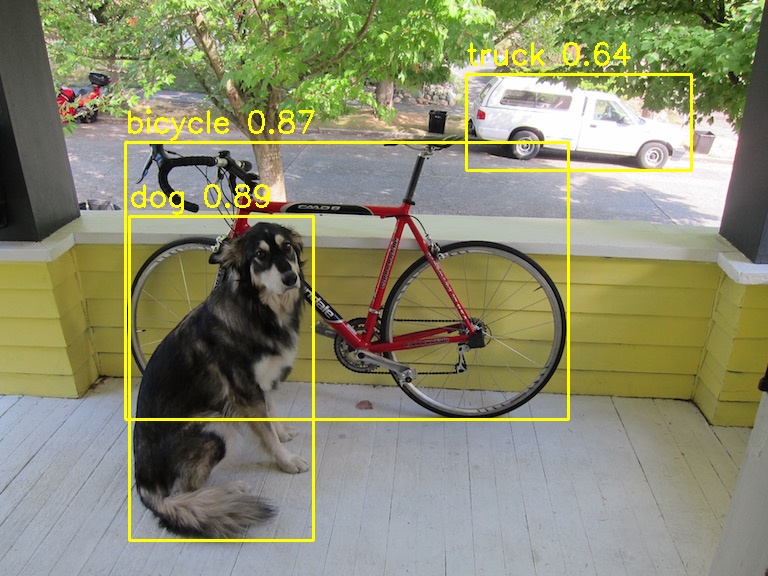
 动态推理:
python程序运行结束后,会在当前目录生成YoloV8动态推理检测结果可视化图像。
动态推理:
python程序运行结束后,会在当前目录生成YoloV8动态推理检测结果可视化图像。
 ### C++版本
静态推理:
C++程序运行结束后,会在build目录生成YOLOV8静态推理检测结果可视化图像。
### C++版本
静态推理:
C++程序运行结束后,会在build目录生成YOLOV8静态推理检测结果可视化图像。
 动态推理:
C++程序运行结束后,会在build目录生成YoloV8动态shape推理检测结果可视化图像。
动态推理:
C++程序运行结束后,会在build目录生成YoloV8动态shape推理检测结果可视化图像。
 ### 精度
无
## 应用场景
### 算法类别
`目标检测`
### 热点应用行业
`交通`,`教育`,`化工`
## 源码仓库及问题反馈
https://developer.sourcefind.cn/codes/modelzoo/yolov8_migraphx
## 参考资料
https://github.com/ultralytics/ultralytics
### 精度
无
## 应用场景
### 算法类别
`目标检测`
### 热点应用行业
`交通`,`教育`,`化工`
## 源码仓库及问题反馈
https://developer.sourcefind.cn/codes/modelzoo/yolov8_migraphx
## 参考资料
https://github.com/ultralytics/ultralytics