"docker/vscode:/vscode.git/clone" did not exist on "5ddd6799aaa11fa7fc83dc003bafccb75d3e2565"

Initial commit
Showing
3rdParty/InstallRBuild.sh
0 → 100644
File added
File added
File added
File added
File added
File added
CMakeLists.txt
0 → 100644
Doc/Tutorial_Cpp.md
0 → 100644
Doc/Tutorial_Python.md
0 → 100644
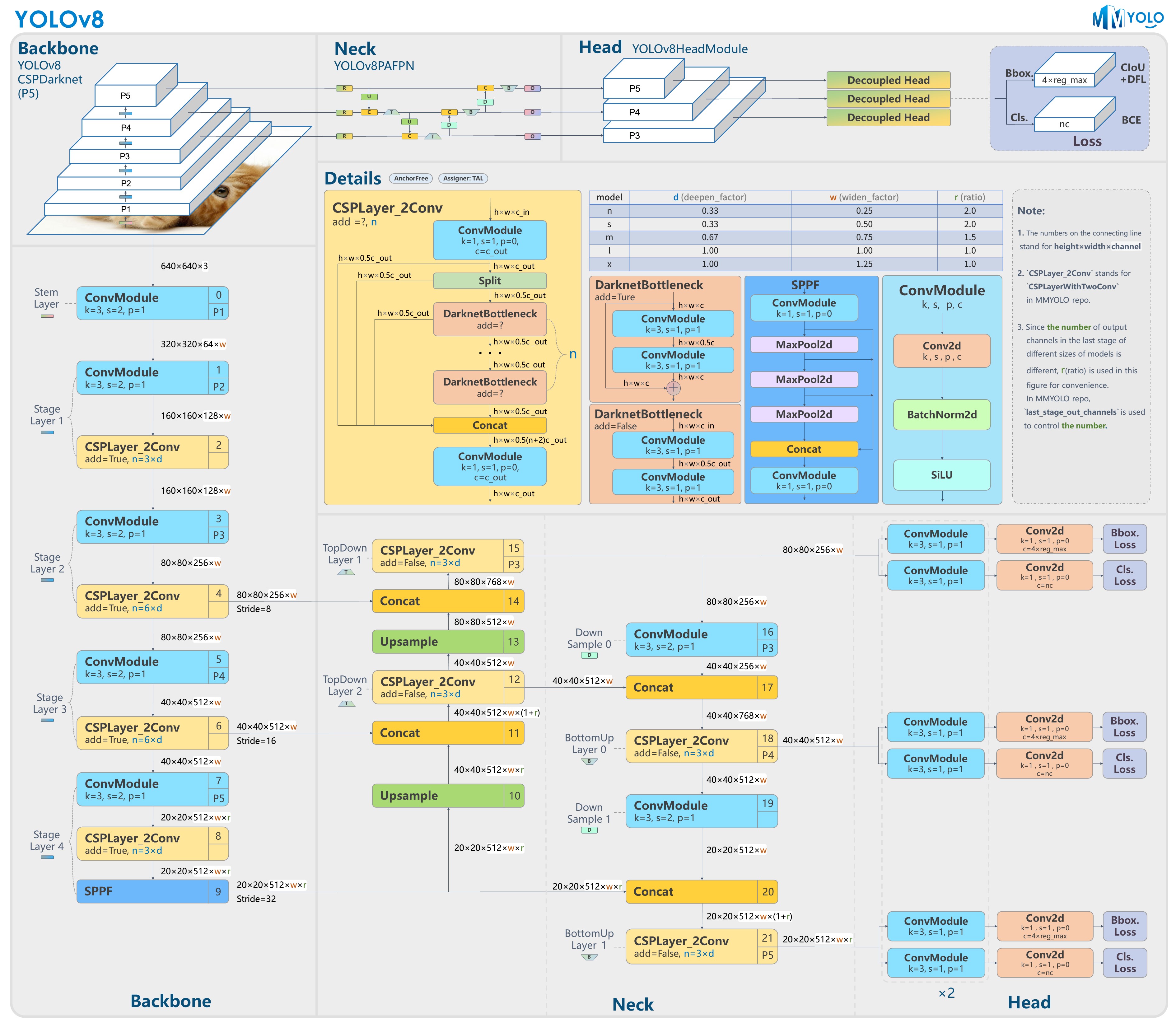
Doc/yolov8_model.jpg
0 → 100644
{kind=link}
1.35 MB
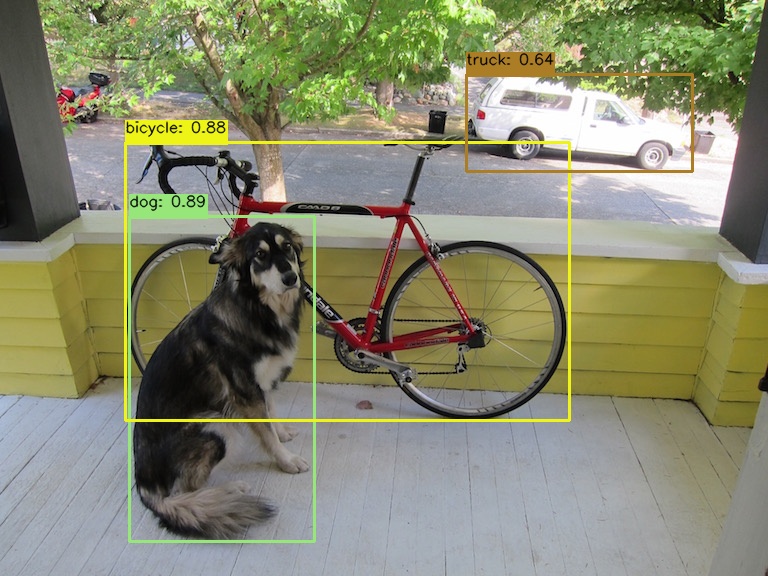
Python/Result.jpg
0 → 100644
{kind=link}

121 KB
Python/Result0.jpg
0 → 100644
{kind=link}
178 KB
Python/Result1.jpg
0 → 100644
{kind=link}

478 KB
README.md
0 → 100644
Resource/Configuration.xml
0 → 100644
{kind=link}

160 KB
{kind=link}

476 KB