
yolov5-qat
Showing
models/hub/yolov5s6.yaml
0 → 100644
models/hub/yolov5x6.yaml
0 → 100644
models/tf.py
0 → 100644
models/yolo.py
0 → 100644
models/yolov5l.yaml
0 → 100644
models/yolov5m.yaml
0 → 100644
models/yolov5n.yaml
0 → 100644
models/yolov5s.yaml
0 → 100644
models/yolov5x.yaml
0 → 100644
pyproject.toml
0 → 100644
quantization/quantize.py
0 → 100644
quantization/rules.py
0 → 100644
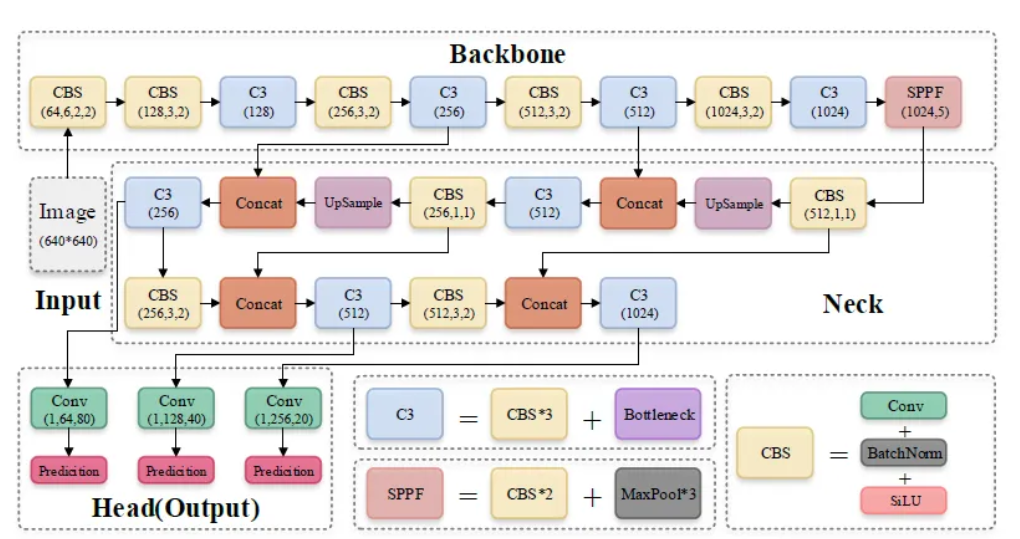
readme_imgs/image-1.png
0 → 100644
{kind=link}
491 KB