# YOLOv3
## 论文
`YOLOv3: An Incremental Improvement`
- https://arxiv.org/abs/1804.02767
## 模型结构
YOLOV3是由Joseph Redmon和Ali Farhadi在2018年提出的单阶段目标检测模型,主要用于自然场景的目标检测。
 ## 算法原理
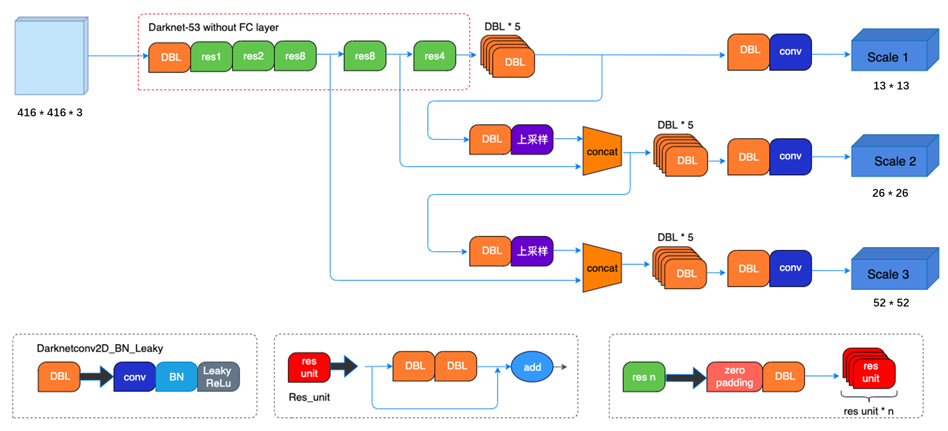
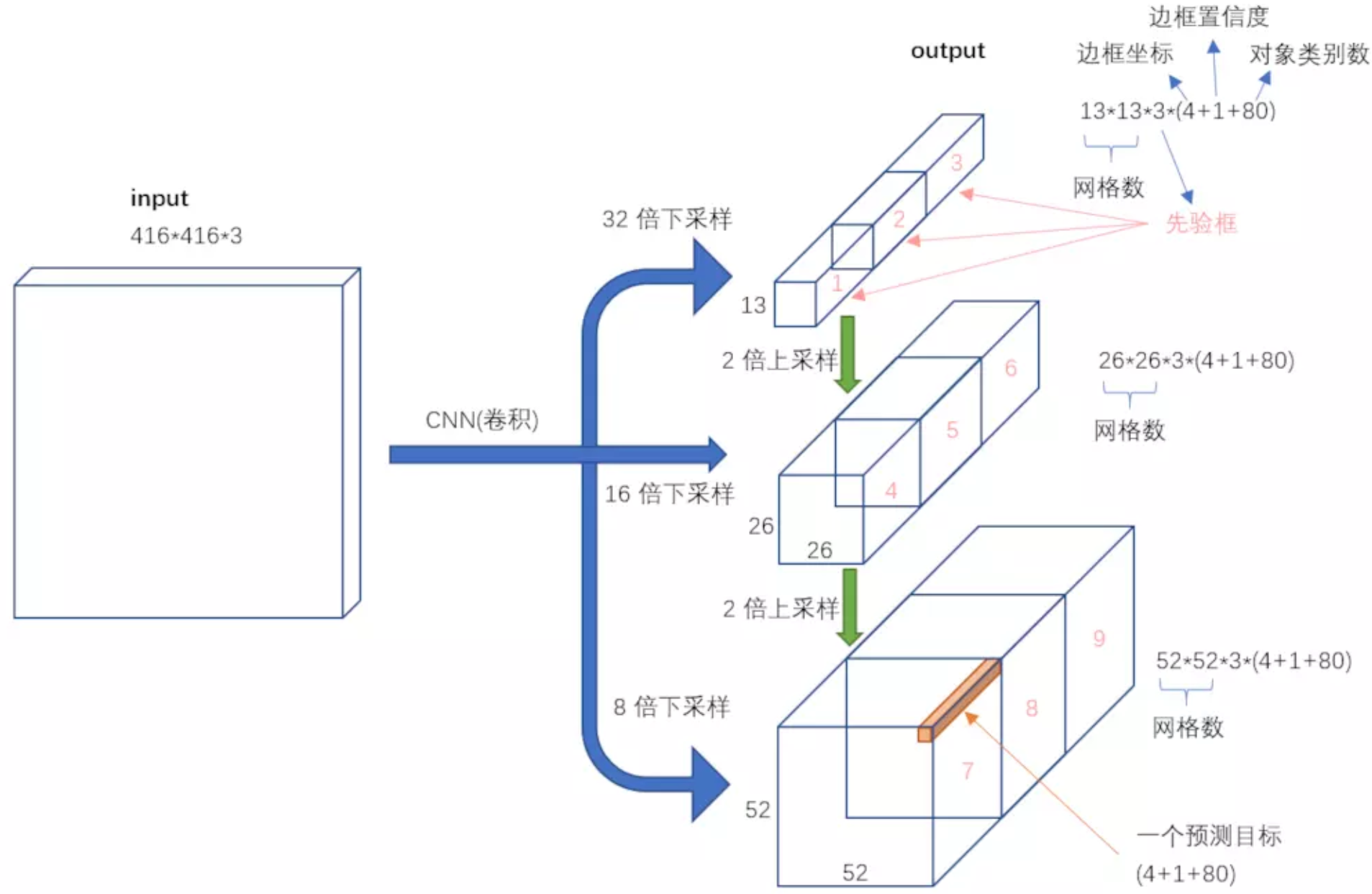
Yolov3算法的基本思想:首先通过特征提取网络对输入提取特征,backbone部分由YOLOV2时期的Darknet19进化至Darknet53加深了网络层数,引入了Resnet中的跨层加和操作;然后结合不同卷积层的特征实现多尺度训练,一共有13x13、26x26、52x52三种分辨率,分别用来预测大、中、小的物体;每种分辨率的特征图将输入图像分成不同数量的格子,每个格子预测B个bounding box,每个bounding box预测内容包括: Location(x, y, w, h)、Confidence Score和C个类别的概率,因此YOLOv3输出层的channel数为B*(5 + C)。YOLOv3的loss函数也有三部分组成:Location误差,Confidence误差和分类误差。
## 算法原理
Yolov3算法的基本思想:首先通过特征提取网络对输入提取特征,backbone部分由YOLOV2时期的Darknet19进化至Darknet53加深了网络层数,引入了Resnet中的跨层加和操作;然后结合不同卷积层的特征实现多尺度训练,一共有13x13、26x26、52x52三种分辨率,分别用来预测大、中、小的物体;每种分辨率的特征图将输入图像分成不同数量的格子,每个格子预测B个bounding box,每个bounding box预测内容包括: Location(x, y, w, h)、Confidence Score和C个类别的概率,因此YOLOv3输出层的channel数为B*(5 + C)。YOLOv3的loss函数也有三部分组成:Location误差,Confidence误差和分类误差。
 ## 环境配置
### Docker(方法一)
拉取镜像:
```plaintext
docker pull image.sourcefind.cn:5000/dcu/admin/base/migraphx:4.3.0-ubuntu20.04-dtk24.04.1-py3.10
```
创建并启动容器:
```plaintext
docker run --shm-size 16g --network=host --name=yolov3_migraphx --privileged --device=/dev/kfd --device=/dev/dri --group-add video --cap-add=SYS_PTRACE --security-opt seccomp=unconfined -v $PWD/yolov3_migraphx:/home/yolov3_migraphx -v /opt/hyhal:/opt/hyhal:ro -it /bin/bash
# 激活dtk
source /opt/dtk/env.sh
```
### Dockerfile(方法二)
```
cd ./docker
docker build --no-cache -t yolov3_migraphx:2.0 .
docker run --shm-size 16g --network=host --name=yolov3_migraphx --privileged --device=/dev/kfd --device=/dev/dri --group-add video --cap-add=SYS_PTRACE --security-opt seccomp=unconfined -v $PWD/yolov3_migraphx:/home/yolov3_migraphx -v /opt/hyhal:/opt/hyhal:ro -it /bin/bash
# 激活dtk
source /opt/dtk/env.sh
```
## 数据集
根据提供的样本数据,进行目标检测。
## 推理
### Python版本推理
下面介绍如何运行Python代码示例,Python示例的详细说明见Doc目录下的Tutorial_Python.md。
#### 设置环境变量
```
export PYTHONPATH=/opt/dtk/lib:$PYTHONPATH
```
#### 安装依赖
```
# 进入python示例目录
cd /Python
# 安装依赖
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
```
#### 运行示例
YoloV3模型的推理示例程序是YoloV3_infer_migraphx.py,在Python目录下使用如下命令运行该推理示例:
```
python YoloV3_infer_migraphx.py \
--imgpath 测试图像路径 \
--modelpath onnx模型路径 \
--objectThreshold 判断是否有物体阈值,默认0.4 \
--confThreshold 置信度阈值,默认0.2 \
--nmsThreshold nms阈值,默认0.4 \
```
### C++版本推理
注意:当使用操作系统不一样时,CMakeList需要做相应的修改:
```
# ubuntu操作系统
${CMAKE_CURRENT_SOURCE_DIR}/depend/lib64/ 修改为 ${CMAKE_CURRENT_SOURCE_DIR}/depend/lib/
# centos操作系统
${CMAKE_CURRENT_SOURCE_DIR}/depend/lib/ 修改为 ${CMAKE_CURRENT_SOURCE_DIR}/depend/lib64/
```
下面介绍如何运行C++代码示例,C++示例的详细说明见Doc目录下的Tutorial_Cpp.md。
#### 构建工程
```
rbuild build -d depend
```
#### 设置环境变量
将依赖库依赖加入环境变量LD_LIBRARY_PATH,在~/.bashrc中添加如下语句:
当操作系统是ubuntu系统时:
```
export LD_LIBRARY_PATH=/depend/lib/:$LD_LIBRARY_PATH
```
当操作系统是centos系统时:
```
export LD_LIBRARY_PATH=/depend/lib64/:$LD_LIBRARY_PATH
```
然后执行:
```
source ~/.bashrc
```
#### 运行示例
成功编译YoloV3工程后,执行如下命令运行该示例:
```
# 进入yolov3 migraphx工程根目录
cd
# 进入build目录
cd ./build/
# 执行示例程序
./YOLOV3
```
## result
### Python版本
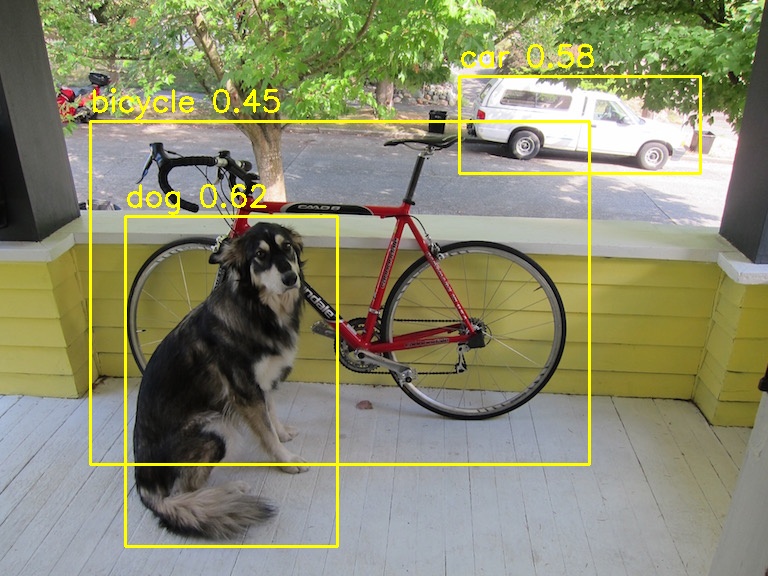
python程序运行结束后,会在当前目录生成目标检测图像。
## 环境配置
### Docker(方法一)
拉取镜像:
```plaintext
docker pull image.sourcefind.cn:5000/dcu/admin/base/migraphx:4.3.0-ubuntu20.04-dtk24.04.1-py3.10
```
创建并启动容器:
```plaintext
docker run --shm-size 16g --network=host --name=yolov3_migraphx --privileged --device=/dev/kfd --device=/dev/dri --group-add video --cap-add=SYS_PTRACE --security-opt seccomp=unconfined -v $PWD/yolov3_migraphx:/home/yolov3_migraphx -v /opt/hyhal:/opt/hyhal:ro -it /bin/bash
# 激活dtk
source /opt/dtk/env.sh
```
### Dockerfile(方法二)
```
cd ./docker
docker build --no-cache -t yolov3_migraphx:2.0 .
docker run --shm-size 16g --network=host --name=yolov3_migraphx --privileged --device=/dev/kfd --device=/dev/dri --group-add video --cap-add=SYS_PTRACE --security-opt seccomp=unconfined -v $PWD/yolov3_migraphx:/home/yolov3_migraphx -v /opt/hyhal:/opt/hyhal:ro -it /bin/bash
# 激活dtk
source /opt/dtk/env.sh
```
## 数据集
根据提供的样本数据,进行目标检测。
## 推理
### Python版本推理
下面介绍如何运行Python代码示例,Python示例的详细说明见Doc目录下的Tutorial_Python.md。
#### 设置环境变量
```
export PYTHONPATH=/opt/dtk/lib:$PYTHONPATH
```
#### 安装依赖
```
# 进入python示例目录
cd /Python
# 安装依赖
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
```
#### 运行示例
YoloV3模型的推理示例程序是YoloV3_infer_migraphx.py,在Python目录下使用如下命令运行该推理示例:
```
python YoloV3_infer_migraphx.py \
--imgpath 测试图像路径 \
--modelpath onnx模型路径 \
--objectThreshold 判断是否有物体阈值,默认0.4 \
--confThreshold 置信度阈值,默认0.2 \
--nmsThreshold nms阈值,默认0.4 \
```
### C++版本推理
注意:当使用操作系统不一样时,CMakeList需要做相应的修改:
```
# ubuntu操作系统
${CMAKE_CURRENT_SOURCE_DIR}/depend/lib64/ 修改为 ${CMAKE_CURRENT_SOURCE_DIR}/depend/lib/
# centos操作系统
${CMAKE_CURRENT_SOURCE_DIR}/depend/lib/ 修改为 ${CMAKE_CURRENT_SOURCE_DIR}/depend/lib64/
```
下面介绍如何运行C++代码示例,C++示例的详细说明见Doc目录下的Tutorial_Cpp.md。
#### 构建工程
```
rbuild build -d depend
```
#### 设置环境变量
将依赖库依赖加入环境变量LD_LIBRARY_PATH,在~/.bashrc中添加如下语句:
当操作系统是ubuntu系统时:
```
export LD_LIBRARY_PATH=/depend/lib/:$LD_LIBRARY_PATH
```
当操作系统是centos系统时:
```
export LD_LIBRARY_PATH=/depend/lib64/:$LD_LIBRARY_PATH
```
然后执行:
```
source ~/.bashrc
```
#### 运行示例
成功编译YoloV3工程后,执行如下命令运行该示例:
```
# 进入yolov3 migraphx工程根目录
cd
# 进入build目录
cd ./build/
# 执行示例程序
./YOLOV3
```
## result
### Python版本
python程序运行结束后,会在当前目录生成目标检测图像。
 ### C++版本
C++程序运行结束后,会在build目录生成目标检测图像。
### 精度
无
## 应用场景
### 算法类别
目标检测
### 热点应用行业
交通,教育,化工
## 源码仓库及问题反馈
- https://developer.sourcefind.cn/codes/modelzoo/yolov3_migraphx
## 参考资料
- https://github.com/ultralytics/yolov3
### C++版本
C++程序运行结束后,会在build目录生成目标检测图像。
### 精度
无
## 应用场景
### 算法类别
目标检测
### 热点应用行业
交通,教育,化工
## 源码仓库及问题反馈
- https://developer.sourcefind.cn/codes/modelzoo/yolov3_migraphx
## 参考资料
- https://github.com/ultralytics/yolov3