# YoloV3
## 模型介绍
YOLOV3是由Joseph Redmon和Ali Farhadi在2018年提出的单阶段目标检测模型,主要用于自然场景的目标检测。
## 模型结构
算法基本思想首先通过特征提取网络对输入提取特征,backbone部分由YOLOV2时期的Darknet19进化至Darknet53加深了网络层数,引入了Resnet中的跨层加和操作;然后结合不同卷积层的特征实现多尺度训练,一共有13x13、26x26、52x52三种分辨率,分别用来预测大、中、小的物体;每种分辨率的特征图将输入图像分成不同数量的格子,每个格子预测B个bounding box,每个bounding box预测内容包括: Location(x, y, w, h)、Confidence Score和C个类别的概率,因此YOLOv3输出层的channel数为B*(5 + C)。YOLOv3的loss函数也有三部分组成:Location误差,Confidence误差和分类误差。参考论文地址:https://arxiv.org/abs/1804.02767
## python版本推理
下面介绍如何运行python代码示例,具体推理代码解析,在Doc/Tutorial_Python.md中有详细说明。
### 拉取镜像
在光源可拉取推理的docker镜像,YoloV3工程推荐的镜像如下:
```python
docker pull image.sourcefind.cn:5000/dcu/admin/base/custom:ort1.14.0_migraphx3.0.0-dtk22.10.1
```
### 推理示例
YoloV3模型的推理示例程序是YoloV3_infer_migraphx.py,使用如下命令运行该推理示例:
```
# 进入python示例目录
cd ./Python
# 安装依赖
pip install -r requirements.txt
# 运行程序
python YoloV3_infer_migraphx.py \
--imgpath 测试图像路径 \
--modelpath onnx模型路径 \
--objectThreshold 判断是否有物体阈值,默认0.4 \
--confThreshold 置信度阈值,默认0.2 \
--nmsThreshold nms阈值,默认0.4 \
```
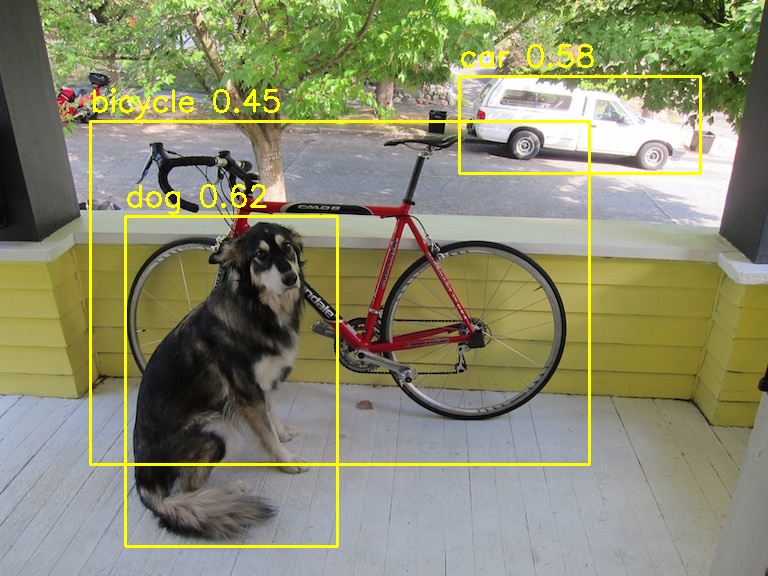
程序运行结束会在当前目录生成YoloV3检测结果图像。
 ## C++版本推理
下面介绍如何运行C++代码示例,具体推理代码解析,在Doc/Tutorial_Cpp.md目录中有详细说明。
参考Python版本推理中的构建安装,在光源中拉取推理的docker镜像。
### 安装Opencv依赖
```python
cd
sh ./3rdParty/InstallOpenCVDependences.sh
```
### 修改CMakeLists.txt
- 如果使用ubuntu系统,需要修改CMakeLists.txt中依赖库路径:
将"${CMAKE_CURRENT_SOURCE_DIR}/depend/lib64/"修改为"${CMAKE_CURRENT_SOURCE_DIR}/depend/lib/"
- **MIGraphX2.3.0及以上版本需要c++17**
### 安装OpenCV并构建工程
```
rbuild build -d depend
```
### 设置环境变量
将依赖库依赖加入环境变量LD_LIBRARY_PATH,在~/.bashrc中添加如下语句:
**Centos**:
```
export LD_LIBRARY_PATH=/depend/lib64/:$LD_LIBRARY_PATH
```
**Ubuntu**:
```
export LD_LIBRARY_PATH=/depend/lib/:$LD_LIBRARY_PATH
```
然后执行:
```
source ~/.bashrc
```
### 推理示例
成功编译YoloV3工程后,执行如下命令运行该示例:
```
# 进入migraphx samples工程根目录
cd
# 进入build目录
cd ./build/
# 执行示例程序
./YOLOV3
```
程序运行结束会在build目录生成YoloV3检测结果图像。
## 历史版本
https://developer.hpccube.com/codes/modelzoo/yolov3_migraphx
## 参考
https://github.com/ultralytics/yolov3
## C++版本推理
下面介绍如何运行C++代码示例,具体推理代码解析,在Doc/Tutorial_Cpp.md目录中有详细说明。
参考Python版本推理中的构建安装,在光源中拉取推理的docker镜像。
### 安装Opencv依赖
```python
cd
sh ./3rdParty/InstallOpenCVDependences.sh
```
### 修改CMakeLists.txt
- 如果使用ubuntu系统,需要修改CMakeLists.txt中依赖库路径:
将"${CMAKE_CURRENT_SOURCE_DIR}/depend/lib64/"修改为"${CMAKE_CURRENT_SOURCE_DIR}/depend/lib/"
- **MIGraphX2.3.0及以上版本需要c++17**
### 安装OpenCV并构建工程
```
rbuild build -d depend
```
### 设置环境变量
将依赖库依赖加入环境变量LD_LIBRARY_PATH,在~/.bashrc中添加如下语句:
**Centos**:
```
export LD_LIBRARY_PATH=/depend/lib64/:$LD_LIBRARY_PATH
```
**Ubuntu**:
```
export LD_LIBRARY_PATH=/depend/lib/:$LD_LIBRARY_PATH
```
然后执行:
```
source ~/.bashrc
```
### 推理示例
成功编译YoloV3工程后,执行如下命令运行该示例:
```
# 进入migraphx samples工程根目录
cd
# 进入build目录
cd ./build/
# 执行示例程序
./YOLOV3
```
程序运行结束会在build目录生成YoloV3检测结果图像。
## 历史版本
https://developer.hpccube.com/codes/modelzoo/yolov3_migraphx
## 参考
https://github.com/ultralytics/yolov3