
Initial commit
Showing
Too many changes to show.
To preserve performance only 370 of 370+ files are displayed.
images/fruit.jpg
0 → 100644
{kind=link}

46.8 KB
images/landscape.jpg
0 → 100644
{kind=link}

106 KB
images/mountain.jpeg
0 → 100644
{kind=link}

541 KB
images/owls.jpeg
0 → 100644
{kind=link}

155 KB
images/penguin.jpeg
0 → 100644
{kind=link}

131 KB
images/region_retrieval.png
0 → 100644
{kind=link}
1.65 MB
images/rose.webp
0 → 100644
{kind=link}

107 KB
images/street.jpg
0 → 100644
{kind=link}

204 KB
images/teaser_new.png
0 → 100644
{kind=link}
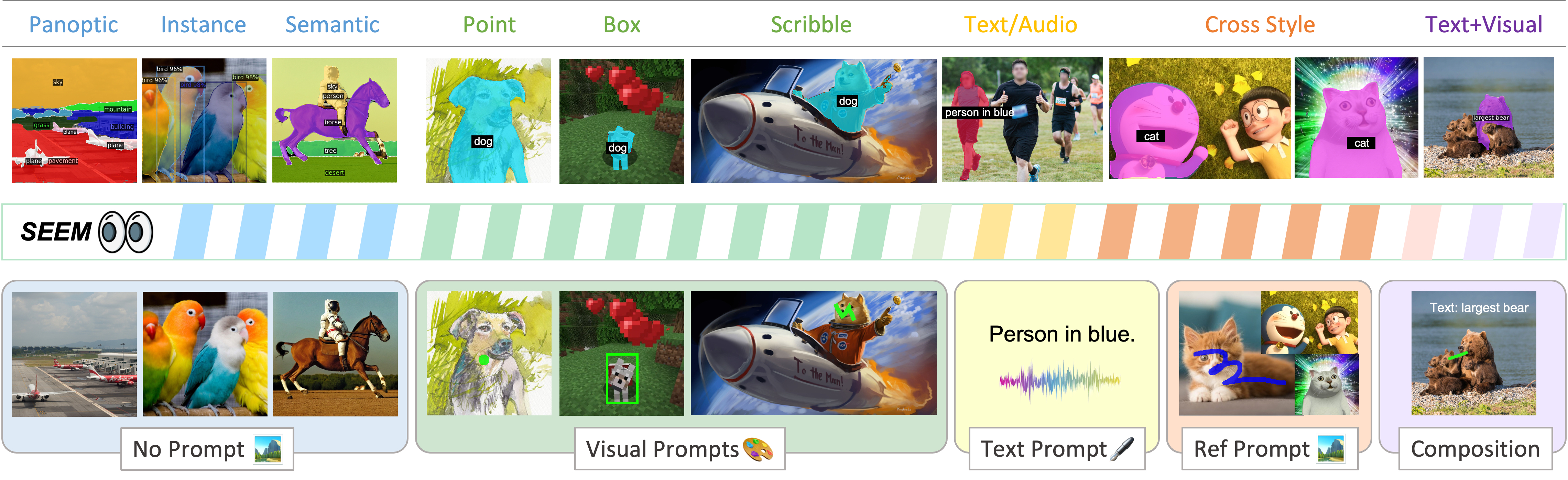
4.17 MB
mmdet/__init__.py
0 → 100644
mmdet/apis/__init__.py
0 → 100644
mmdet/apis/det_inferencer.py
0 → 100644
mmdet/apis/inference.py
0 → 100644