
TextMonkey (#75)
* textmonkey
* textmonkey code
* Delete README_cn.md
---------
Co-authored-by:  Yuliang Liu <34134635+Yuliang-Liu@users.noreply.github.com>
Yuliang Liu <34134635+Yuliang-Liu@users.noreply.github.com>
Showing
{kind=link}
384 KB
images/logo_vlr.png
deleted
100644 → 0
{kind=link}
13.8 KB
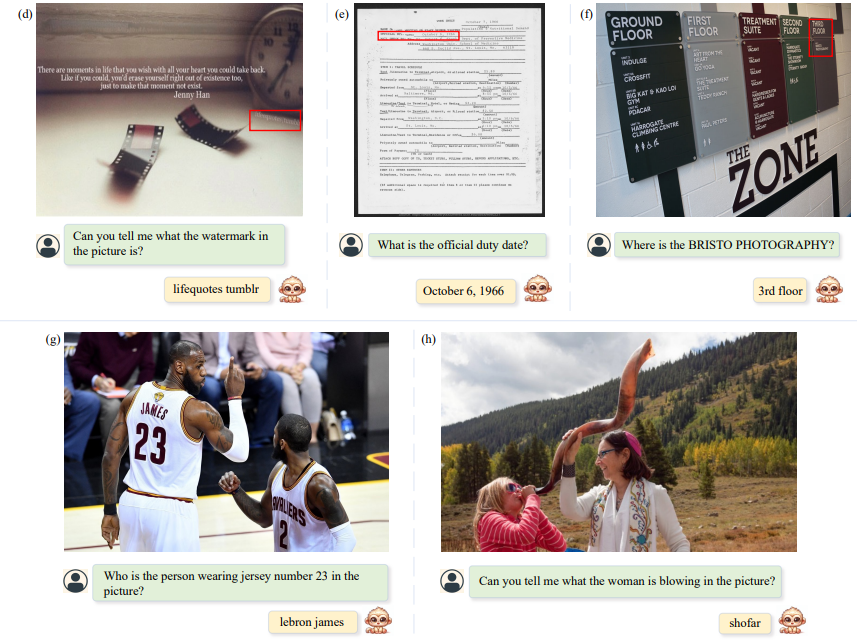
images/qa_1.png
deleted
100644 → 0
{kind=link}
742 KB
{kind=link}
8.65 MB
images/radar.pdf
deleted
100644 → 0
File deleted
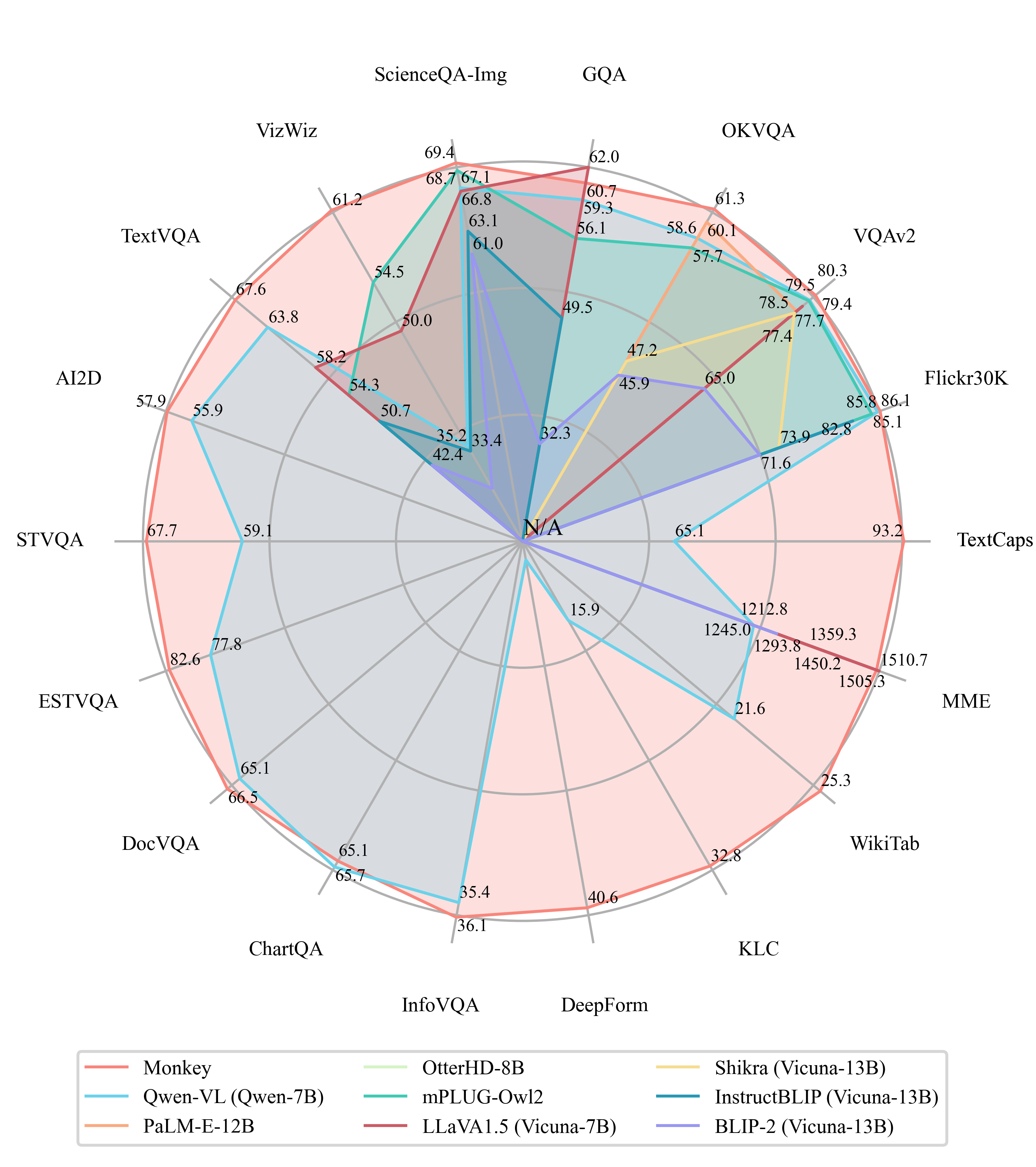
images/radar.png
deleted
100644 → 0
{kind=link}
205 KB
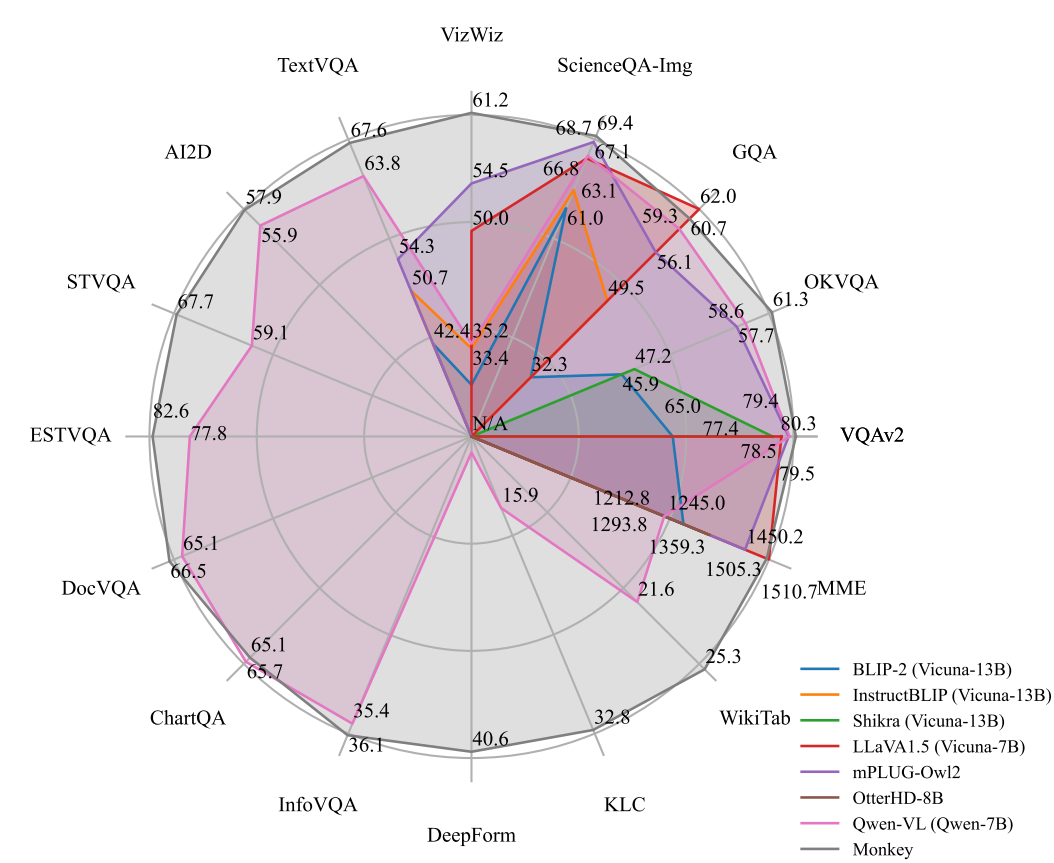
images/radar_1.png
deleted
100644 → 0
{kind=link}
1.01 MB
inference.py
0 → 100644