# RoboBrain
## 论文
[RoboBrain: A Unified Brain Model for Robotic Manipulation from Abstract to Concrete](https://arxiv.org/abs/2502.21257)
## 模型结构
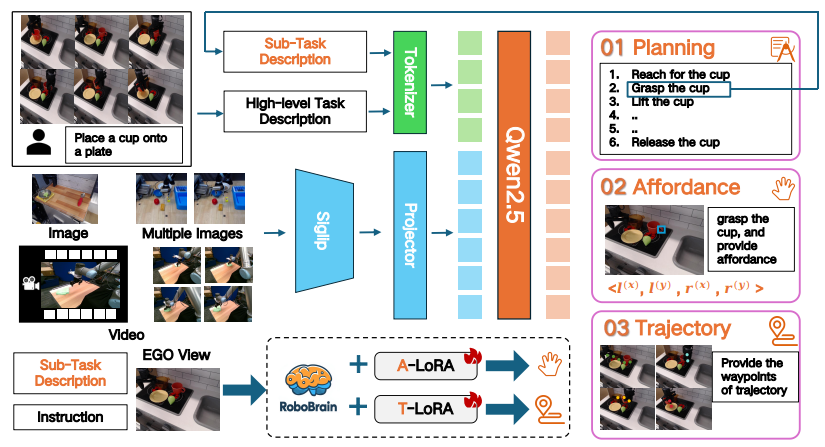
模型基于qwen2.5进行构建。
## 算法原理
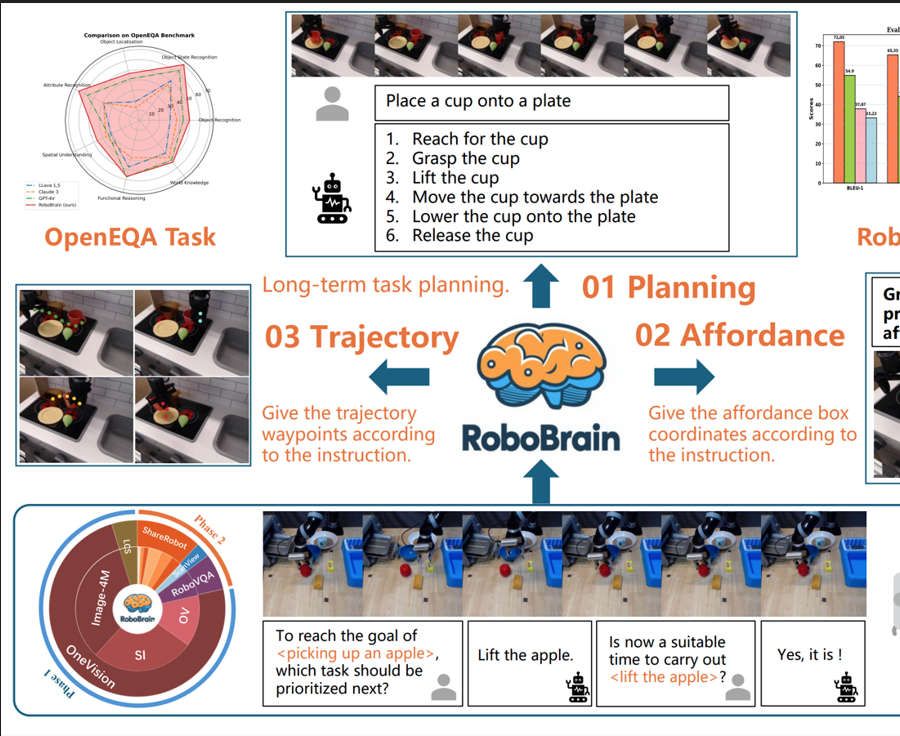
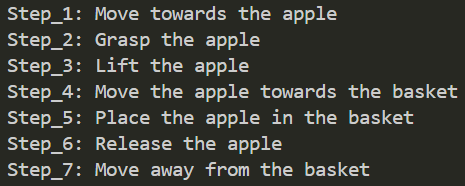
在实际应用中,该模型首先生成详细的计划,然后将其拆分为子任务描述以执行具体的机器人任务。
## 环境配置
### 硬件需求
DCU型号:K100_AI,节点数量:1台,卡数:2 张。
`-v 路径`、`docker_name`和`imageID`根据实际情况修改
### Docker(方法一)
```bash
docker pull image.sourcefind.cn:5000/dcu/admin/base/custom:vllm0.8.5-ubuntu22.04-dtk25.04-rc7-das1.5-py3.10-20250612-fixpy-rocblas0611-rc2
docker run -it --shm-size 200g --network=host --name {docker_name} --privileged --device=/dev/kfd --device=/dev/dri --device=/dev/mkfd --group-add video --cap-add=SYS_PTRACE --security-opt seccomp=unconfined -u root -v /path/your_code_data/:/path/your_code_data/ -v /opt/hyhal/:/opt/hyhal/:ro {imageID} bash
cd /your_code_path/robobrain_pytorch
```
### Dockerfile(方法二)
```bash
cd docker
docker build --no-cache -t robobrain:latest .
docker run -it --shm-size 200g --network=host --name {docker_name} --privileged --device=/dev/kfd --device=/dev/dri --device=/dev/mkfd --group-add video --cap-add=SYS_PTRACE --security-opt seccomp=unconfined -u root -v /path/your_code_data/:/path/your_code_data/ -v /opt/hyhal/:/opt/hyhal/:ro {imageID} bash
cd /your_code_path/robobrain_pytorch
```
### Anaconda(方法三)
关于本项目DCU显卡所需的特殊深度学习库可从[光合](https://developer.sourcefind.cn/tool/)开发者社区下载安装。
```bash
DTK: 25.04
python: 3.10
vllm: 0.8.5
torch: 2.4.1+das.opt2.dtk2504
deepspeed: 0.14.2+das.opt2.dtk2504
```
`Tips:以上dtk驱动、python、torch等DCU相关工具版本需要严格一一对应`
## 数据集
无
## 训练
暂无
## 推理
### vllm推理方法
#### server
server启动
```bash
vllm serve BAAI/RoboBrain --served-model-name robobrain --max_model_len 16384 -tp 2 --limit_mm_per_prompt image=2
```
client访问
```bash
python client.py
```
## result
### 精度
DCU与GPU精度一致,推理框架:vllm。
## 应用场景
### 算法类别
文本理解
### 热点应用行业
制造,广媒,家居,教育
## 预训练权重
- [BAAI/RoboBrain](https://huggingface.co/BAAI/RoboBrain)
## 源码仓库及问题反馈
- https://developer.sourcefind.cn/codes/modelzoo/robobrain_pytorch
## 参考资料
- https://github.com/FlagOpen/RoboBrain.git