diff --git a/CODE_OF_CONDUCT.md b/CODE_OF_CONDUCT.md
new file mode 100644
index 0000000000000000000000000000000000000000..2ec7ff4d2077868bd6a593d33c5a6bff5a8a55cd
--- /dev/null
+++ b/CODE_OF_CONDUCT.md
@@ -0,0 +1,79 @@
+# TensorFlow-models Code of Conduct
+
+In the interest of fostering an open and welcoming environment, we as
+contributors and maintainers pledge to make participation in our project and our
+community a harassment-free experience for everyone, regardless of age, body
+size, disability, ethnicity, gender identity and expression, level of
+experience, nationality, personal appearance, race, religion, or sexual identity
+and orientation.
+
+## Our Standards
+
+Examples of behavior that contributes to creating a positive environment include:
+
+* Using welcoming and inclusive language.
+* Being respectful of differing viewpoints and experiences.
+* Gracefully accepting constructive criticism.
+* Focusing on what is best for the community.
+* Showing empathy towards other community members.
+
+Examples of unacceptable behavior by participants include:
+
+* The use of sexualized language or imagery and unwelcome sexual attention or
+ advances.
+* Trolling, insulting/derogatory comments, and personal or political attacks.
+* Public or private harassment.
+* Publishing others' private information, such as a physical or electronic
+ address, without explicit permission.
+* Conduct which could reasonably be considered inappropriate for the forum in
+ which it occurs.
+
+All TensorFlow-models forums and spaces are meant for professional interactions, and any behavior which could reasonably be considered inappropriate in a professional setting is unacceptable.
+
+å
+## Our Responsibilities
+
+Project maintainers are responsible for clarifying the standards of acceptable behavior and are expected to take appropriate and fair corrective action in response to any instances of unacceptable behavior.
+
+Project maintainers have the right and responsibility to remove, edit, or reject comments, commits, code, wiki edits, issues, and other contributions that are not aligned to this Code of Conduct, or to ban temporarily or permanently any contributor for other behaviors that they deem inappropriate, threatening, offensive, or harmful.
+
+
+## Scope
+
+This Code of Conduct applies to all content on tensorflow.org, TensorFlow-models GitHub organization, or any other official TensorFlow-models web presence allowing for community interactions, as well as at all official TensorFlow-models events, whether offline or online.
+
+The Code of Conduct also applies within project spaces and in public spaces whenever an individual is representing TensorFlow-models or its community. Examples of representing a project or community include using an official project e-mail address, posting via an official social media account, or acting as an appointed or de facto representative at an online or offline event.
+
+
+## Conflict Resolution
+
+Conflicts in an open source project can take many forms, from someone having a bad day and using harsh and hurtful language in the issue queue, to more serious instances such as sexist/racist statements or threats of violence, and everything in between.
+
+If the behavior is threatening or harassing, or for other reasons requires immediate escalation, please see below.
+
+However, for the vast majority of issues, we aim to empower individuals to first resolve conflicts themselves, asking for help when needed, and only after that fails to escalate further. This approach gives people more control over the outcome of their dispute.
+
+If you are experiencing or witnessing conflict, we ask you to use the following escalation strategy to address the conflict:
+
+1. Address the perceived conflict directly with those involved, preferably in a
+ real-time medium.
+2. If this fails, get a third party (e.g. a mutual friend, and/or someone with
+ background on the issue, but not involved in the conflict) to intercede.
+3. If you are still unable to resolve the conflict, and you believe it rises to
+ harassment or another code of conduct violation, report it.
+
+## Reporting Violations
+
+Violations of the Code of Conduct can be reported to TensorFlow’s Project Stewards, Thea Lamkin (thealamkin@google.com) and Joana Carrasqueira (joanafilipa@google.com). The Project Steward will determine whether the Code of Conduct was violated, and will issue an appropriate sanction, possibly including a written warning or expulsion from the project, project sponsored spaces, or project forums. We ask that you make a good-faith effort to resolve your conflict via the conflict resolution policy before submitting a report.
+
+Violations of the Code of Conduct can occur in any setting, even those unrelated to the project. We will only consider complaints about conduct that has occurred within one year of the report.
+
+
+## Enforcement
+
+If the Project Stewards receive a report alleging a violation of the Code of Conduct, the Project Stewards will notify the accused of the report, and provide them an opportunity to discuss the report before a sanction is issued. The Project Stewards will do their utmost to keep the reporter anonymous. If the act is ongoing (such as someone engaging in harassment), or involves a threat to anyone's safety (e.g. threats of violence), the Project Stewards may issue sanctions without notice.
+
+
+## Attribution
+
+This Code of Conduct is adapted from the Contributor Covenant, version 1.4, available at https://contributor-covenant.org/version/1/4, and includes some aspects of the Geek Feminism Code of Conduct and the Drupal Code of Conduct.
diff --git a/README.md b/README.md
index a27d3e7bedb48be508c920c5177e22647c4cd616..e9c928a4e4f8c53be8d456a1bdfa88f49a8acdbc 100644
--- a/README.md
+++ b/README.md
@@ -1,4 +1,9 @@
-
+
+

+
+
+**tf-models-official** is the stable Model Garden package.
+pip will install all models and dependencies automatically.
+
+```shell
+pip3 install tf-models-official
+```
+
+If you are using nlp packages, please also install **tensorflow-text**:
+
+```shell
+pip3 install tensorflow-text
+```
+
+Please check out our [example](https://github.com/tensorflow/text/blob/master/docs/tutorials/fine_tune_bert.ipynb)
+to learn how to use a PIP package.
+
+Note that **tf-models-official** may not include the latest changes in this
+github repo. To include latest changes, you may install **tf-models-nightly**,
+which is the nightly Model Garden package created daily automatically.
+
+```shell
+pip3 install tf-models-nightly
+```
+
+If you are using `nlp` packages, please also install tensorflow-text-nightly
+
+```shell
+pip3 install tensorflow-text-nightly
+```
+
+
+
+#### Method 2: Clone the source
+
+
+
+1. Clone the GitHub repository:
+
+```shell
+git clone https://github.com/tensorflow/models.git
+```
+
+2. Add the top-level ***/models*** folder to the Python path.
+
+```shell
+export PYTHONPATH=$PYTHONPATH:/path/to/models
+```
+
+If you are using a Colab notebook, please set the Python path with os.environ.
+
+```python
+import os
+os.environ['PYTHONPATH'] += ":/path/to/models"
+```
+
+3. Install other dependencies
+
+```shell
+pip3 install --user -r official/requirements.txt
+```
+
+Finally, if you are using nlp packages, please also install
+**tensorflow-text-nightly**:
+
+```shell
+pip3 install tensorflow-text-nightly
+```
+
+
+
+
+## Announcements
+
+Please check [this page](https://github.com/tensorflow/models/wiki/Announcements) for recent announcements.
## Contributions
@@ -37,9 +123,8 @@ If you use TensorFlow Model Garden in your research, please cite this repository
```
@misc{tensorflowmodelgarden2020,
- author = {Hongkun Yu and Chen Chen and Xianzhi Du and Yeqing Li and
- Abdullah Rashwan and Le Hou and Pengchong Jin and Fan Yang and
- Frederick Liu and Jaeyoun Kim and Jing Li},
+ author = {Hongkun Yu, Chen Chen, Xianzhi Du, Yeqing Li, Abdullah Rashwan, Le Hou, Pengchong Jin, Fan Yang,
+ Frederick Liu, Jaeyoun Kim, and Jing Li},
title = {{TensorFlow Model Garden}},
howpublished = {\url{https://github.com/tensorflow/models}},
year = {2020}
diff --git a/SECURITY.md b/SECURITY.md
new file mode 100644
index 0000000000000000000000000000000000000000..4b71ec02b784097892f5c8c9e6c9aa7da0635829
--- /dev/null
+++ b/SECURITY.md
@@ -0,0 +1,251 @@
+# Using TensorFlow Securely
+
+This document discusses how to safely deal with untrusted programs (models or
+model parameters), and input data. Below, we also provide guidelines on how to
+report vulnerabilities in TensorFlow.
+
+## TensorFlow models are programs
+
+TensorFlow's runtime system interprets and executes programs. What machine
+learning practitioners term
+[**models**](https://developers.google.com/machine-learning/glossary/#model) are
+expressed as programs that TensorFlow executes. TensorFlow programs are encoded
+as computation
+[**graphs**](https://developers.google.com/machine-learning/glossary/#graph).
+The model's parameters are often stored separately in **checkpoints**.
+
+At runtime, TensorFlow executes the computation graph using the parameters
+provided. Note that the behavior of the computation graph may change
+depending on the parameters provided. TensorFlow itself is not a sandbox. When
+executing the computation graph, TensorFlow may read and write files, send and
+receive data over the network, and even spawn additional processes. All these
+tasks are performed with the permissions of the TensorFlow process. Allowing
+for this flexibility makes for a powerful machine learning platform,
+but it has implications for security.
+
+The computation graph may also accept **inputs**. Those inputs are the
+data you supply to TensorFlow to train a model, or to use a model to run
+inference on the data.
+
+**TensorFlow models are programs, and need to be treated as such from a security
+perspective.**
+
+## Running untrusted models
+
+As a general rule: **Always** execute untrusted models inside a sandbox (e.g.,
+[nsjail](https://github.com/google/nsjail)).
+
+There are several ways in which a model could become untrusted. Obviously, if an
+untrusted party supplies TensorFlow kernels, arbitrary code may be executed.
+The same is true if the untrusted party provides Python code, such as the
+Python code that generates TensorFlow graphs.
+
+Even if the untrusted party only supplies the serialized computation
+graph (in form of a `GraphDef`, `SavedModel`, or equivalent on-disk format), the
+set of computation primitives available to TensorFlow is powerful enough that
+you should assume that the TensorFlow process effectively executes arbitrary
+code. One common solution is to allow only a few safe Ops. While this is
+possible in theory, we still recommend you sandbox the execution.
+
+It depends on the computation graph whether a user provided checkpoint is safe.
+It is easily possible to create computation graphs in which malicious
+checkpoints can trigger unsafe behavior. For example, consider a graph that
+contains a `tf.cond` depending on the value of a `tf.Variable`. One branch of
+the `tf.cond` is harmless, but the other is unsafe. Since the `tf.Variable` is
+stored in the checkpoint, whoever provides the checkpoint now has the ability to
+trigger unsafe behavior, even though the graph is not under their control.
+
+In other words, graphs can contain vulnerabilities of their own. To allow users
+to provide checkpoints to a model you run on their behalf (e.g., in order to
+compare model quality for a fixed model architecture), you must carefully audit
+your model, and we recommend you run the TensorFlow process in a sandbox.
+
+## Accepting untrusted Inputs
+
+It is possible to write models that are secure in a sense that they can safely
+process untrusted inputs assuming there are no bugs. There are two main reasons
+to not rely on this: First, it is easy to write models which must not be exposed
+to untrusted inputs, and second, there are bugs in any software system of
+sufficient complexity. Letting users control inputs could allow them to trigger
+bugs either in TensorFlow or in dependent libraries.
+
+In general, it is good practice to isolate parts of any system which is exposed
+to untrusted (e.g., user-provided) inputs in a sandbox.
+
+A useful analogy to how any TensorFlow graph is executed is any interpreted
+programming language, such as Python. While it is possible to write secure
+Python code which can be exposed to user supplied inputs (by, e.g., carefully
+quoting and sanitizing input strings, size-checking input blobs, etc.), it is
+very easy to write Python programs which are insecure. Even secure Python code
+could be rendered insecure by a bug in the Python interpreter, or in a bug in a
+Python library used (e.g.,
+[this one](https://www.cvedetails.com/cve/CVE-2017-12852/)).
+
+## Running a TensorFlow server
+
+TensorFlow is a platform for distributed computing, and as such there is a
+TensorFlow server (`tf.train.Server`). **The TensorFlow server is meant for
+internal communication only. It is not built for use in an untrusted network.**
+
+For performance reasons, the default TensorFlow server does not include any
+authorization protocol and sends messages unencrypted. It accepts connections
+from anywhere, and executes the graphs it is sent without performing any checks.
+Therefore, if you run a `tf.train.Server` in your network, anybody with
+access to the network can execute what you should consider arbitrary code with
+the privileges of the process running the `tf.train.Server`.
+
+When running distributed TensorFlow, you must isolate the network in which the
+cluster lives. Cloud providers provide instructions for setting up isolated
+networks, which are sometimes branded as "virtual private cloud." Refer to the
+instructions for
+[GCP](https://cloud.google.com/compute/docs/networks-and-firewalls) and
+[AWS](https://aws.amazon.com/vpc/)) for details.
+
+Note that `tf.train.Server` is different from the server created by
+`tensorflow/serving` (the default binary for which is called `ModelServer`).
+By default, `ModelServer` also has no built-in mechanism for authentication.
+Connecting it to an untrusted network allows anyone on this network to run the
+graphs known to the `ModelServer`. This means that an attacker may run
+graphs using untrusted inputs as described above, but they would not be able to
+execute arbitrary graphs. It is possible to safely expose a `ModelServer`
+directly to an untrusted network, **but only if the graphs it is configured to
+use have been carefully audited to be safe**.
+
+Similar to best practices for other servers, we recommend running any
+`ModelServer` with appropriate privileges (i.e., using a separate user with
+reduced permissions). In the spirit of defense in depth, we recommend
+authenticating requests to any TensorFlow server connected to an untrusted
+network, as well as sandboxing the server to minimize the adverse effects of
+any breach.
+
+## Vulnerabilities in TensorFlow
+
+TensorFlow is a large and complex system. It also depends on a large set of
+third party libraries (e.g., `numpy`, `libjpeg-turbo`, PNG parsers, `protobuf`).
+It is possible that TensorFlow or its dependent libraries contain
+vulnerabilities that would allow triggering unexpected or dangerous behavior
+with specially crafted inputs.
+
+### What is a vulnerability?
+
+Given TensorFlow's flexibility, it is possible to specify computation graphs
+which exhibit unexpected or unwanted behavior. The fact that TensorFlow models
+can perform arbitrary computations means that they may read and write files,
+communicate via the network, produce deadlocks and infinite loops, or run out
+of memory. It is only when these behaviors are outside the specifications of the
+operations involved that such behavior is a vulnerability.
+
+A `FileWriter` writing a file is not unexpected behavior and therefore is not a
+vulnerability in TensorFlow. A `MatMul` allowing arbitrary binary code execution
+**is** a vulnerability.
+
+This is more subtle from a system perspective. For example, it is easy to cause
+a TensorFlow process to try to allocate more memory than available by specifying
+a computation graph containing an ill-considered `tf.tile` operation. TensorFlow
+should exit cleanly in this case (it would raise an exception in Python, or
+return an error `Status` in C++). However, if the surrounding system is not
+expecting the possibility, such behavior could be used in a denial of service
+attack (or worse). Because TensorFlow behaves correctly, this is not a
+vulnerability in TensorFlow (although it would be a vulnerability of this
+hypothetical system).
+
+As a general rule, it is incorrect behavior for TensorFlow to access memory it
+does not own, or to terminate in an unclean way. Bugs in TensorFlow that lead to
+such behaviors constitute a vulnerability.
+
+One of the most critical parts of any system is input handling. If malicious
+input can trigger side effects or incorrect behavior, this is a bug, and likely
+a vulnerability.
+
+### Reporting vulnerabilities
+
+Please email reports about any security related issues you find to
+`security@tensorflow.org`. This mail is delivered to a small security team. Your
+email will be acknowledged within one business day, and you'll receive a more
+detailed response to your email within 7 days indicating the next steps in
+handling your report. For critical problems, you may encrypt your report (see
+below).
+
+Please use a descriptive subject line for your report email. After the initial
+reply to your report, the security team will endeavor to keep you informed of
+the progress being made towards a fix and announcement.
+
+In addition, please include the following information along with your report:
+
+* Your name and affiliation (if any).
+* A description of the technical details of the vulnerabilities. It is very
+ important to let us know how we can reproduce your findings.
+* An explanation who can exploit this vulnerability, and what they gain when
+ doing so -- write an attack scenario. This will help us evaluate your report
+ quickly, especially if the issue is complex.
+* Whether this vulnerability public or known to third parties. If it is, please
+ provide details.
+
+If you believe that an existing (public) issue is security-related, please send
+an email to `security@tensorflow.org`. The email should include the issue ID and
+a short description of why it should be handled according to this security
+policy.
+
+Once an issue is reported, TensorFlow uses the following disclosure process:
+
+* When a report is received, we confirm the issue and determine its severity.
+* If we know of specific third-party services or software based on TensorFlow
+ that require mitigation before publication, those projects will be notified.
+* An advisory is prepared (but not published) which details the problem and
+ steps for mitigation.
+* The vulnerability is fixed and potential workarounds are identified.
+* Wherever possible, the fix is also prepared for the branches corresponding to
+ all releases of TensorFlow at most one year old. We will attempt to commit
+ these fixes as soon as possible, and as close together as possible.
+* Patch releases are published for all fixed released versions, a
+ notification is sent to discuss@tensorflow.org, and the advisory is published.
+
+Note that we mostly do patch releases for security reasons and each version of
+TensorFlow is supported for only 1 year after the release.
+
+Past security advisories are listed below. We credit reporters for identifying
+security issues, although we keep your name confidential if you request it.
+
+#### Encryption key for `security@tensorflow.org`
+
+If your disclosure is extremely sensitive, you may choose to encrypt your
+report using the key below. Please only use this for critical security
+reports.
+
+```
+-----BEGIN PGP PUBLIC KEY BLOCK-----
+
+mQENBFpqdzwBCADTeAHLNEe9Vm77AxhmGP+CdjlY84O6DouOCDSq00zFYdIU/7aI
+LjYwhEmDEvLnRCYeFGdIHVtW9YrVktqYE9HXVQC7nULU6U6cvkQbwHCdrjaDaylP
+aJUXkNrrxibhx9YYdy465CfusAaZ0aM+T9DpcZg98SmsSml/HAiiY4mbg/yNVdPs
+SEp/Ui4zdIBNNs6at2gGZrd4qWhdM0MqGJlehqdeUKRICE/mdedXwsWLM8AfEA0e
+OeTVhZ+EtYCypiF4fVl/NsqJ/zhBJpCx/1FBI1Uf/lu2TE4eOS1FgmIqb2j4T+jY
+e+4C8kGB405PAC0n50YpOrOs6k7fiQDjYmbNABEBAAG0LVRlbnNvckZsb3cgU2Vj
+dXJpdHkgPHNlY3VyaXR5QHRlbnNvcmZsb3cub3JnPokBTgQTAQgAOBYhBEkvXzHm
+gOJBnwP4Wxnef3wVoM2yBQJaanc8AhsDBQsJCAcCBhUKCQgLAgQWAgMBAh4BAheA
+AAoJEBnef3wVoM2yNlkIAICqetv33MD9W6mPAXH3eon+KJoeHQHYOuwWfYkUF6CC
+o+X2dlPqBSqMG3bFuTrrcwjr9w1V8HkNuzzOJvCm1CJVKaxMzPuXhBq5+DeT67+a
+T/wK1L2R1bF0gs7Pp40W3np8iAFEh8sgqtxXvLGJLGDZ1Lnfdprg3HciqaVAiTum
+HBFwszszZZ1wAnKJs5KVteFN7GSSng3qBcj0E0ql2nPGEqCVh+6RG/TU5C8gEsEf
+3DX768M4okmFDKTzLNBm+l08kkBFt+P43rNK8dyC4PXk7yJa93SmS/dlK6DZ16Yw
+2FS1StiZSVqygTW59rM5XNwdhKVXy2mf/RtNSr84gSi5AQ0EWmp3PAEIALInfBLR
+N6fAUGPFj+K3za3PeD0fWDijlC9f4Ety/icwWPkOBdYVBn0atzI21thPRbfuUxfe
+zr76xNNrtRRlbDSAChA1J5T86EflowcQor8dNC6fS+oHFCGeUjfEAm16P6mGTo0p
+osdG2XnnTHOOEFbEUeWOwR/zT0QRaGGknoy2pc4doWcJptqJIdTl1K8xyBieik/b
+nSoClqQdZJa4XA3H9G+F4NmoZGEguC5GGb2P9NHYAJ3MLHBHywZip8g9oojIwda+
+OCLL4UPEZ89cl0EyhXM0nIAmGn3Chdjfu3ebF0SeuToGN8E1goUs3qSE77ZdzIsR
+BzZSDFrgmZH+uP0AEQEAAYkBNgQYAQgAIBYhBEkvXzHmgOJBnwP4Wxnef3wVoM2y
+BQJaanc8AhsMAAoJEBnef3wVoM2yX4wIALcYZbQhSEzCsTl56UHofze6C3QuFQIH
+J4MIKrkTfwiHlCujv7GASGU2Vtis5YEyOoMidUVLlwnebE388MmaJYRm0fhYq6lP
+A3vnOCcczy1tbo846bRdv012zdUA+wY+mOITdOoUjAhYulUR0kiA2UdLSfYzbWwy
+7Obq96Jb/cPRxk8jKUu2rqC/KDrkFDtAtjdIHh6nbbQhFuaRuWntISZgpIJxd8Bt
+Gwi0imUVd9m9wZGuTbDGi6YTNk0GPpX5OMF5hjtM/objzTihSw9UN+65Y/oSQM81
+v//Fw6ZeY+HmRDFdirjD7wXtIuER4vqCryIqR6Xe9X8oJXz9L/Jhslc=
+=CDME
+-----END PGP PUBLIC KEY BLOCK-----
+```
+
+### Known Vulnerabilities
+
+At this time there are no known vulnerability with TensorFlow-models. For a list of known vulnerabilities and security advisories for TensorFlow,
+[click here](https://github.com/tensorflow/tensorflow/blob/master/tensorflow/security/README.md).
diff --git a/official/README.md b/official/README.md
index 001d48ff87305734a627dc61de496ca6fca2b5a7..b84109e2fade548d1891e1e243e4777a1e2e5aec 100644
--- a/official/README.md
+++ b/official/README.md
@@ -1,4 +1,6 @@
-
+
+
+
+
+* Models are trained from scratch with batch size 4096 and 1.6 initial learning
+ rate.
+* Linear warmup is applied for the first 5 epochs.
+* Models trained with l2 weight regularization and ReLU activation.
+
+| Model | Resolution | Epochs | Top-1 | Top-5 | Download |
+| ------------ |:-------------:|--------:|--------:|--------:|---------:|
+| ResNet-50 | 224x224 | 90 | 76.1 | 92.9 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/image_classification/imagenet_resnet50_tpu.yaml) |
+| ResNet-50 | 224x224 | 200 | 77.1 | 93.5 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/image_classification/imagenet_resnet50_tpu.yaml) |
+| ResNet-101 | 224x224 | 200 | 78.3 | 94.2 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/image_classification/imagenet_resnet101_tpu.yaml) |
+| ResNet-152 | 224x224 | 200 | 78.7 | 94.3 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/image_classification/imagenet_resnet152_tpu.yaml) |
+
+
+
+### ResNet-RS models trained with various settings
+
+
+
+We support state-of-the-art [ResNet-RS](https://arxiv.org/abs/2103.07579) image
+classification models with features:
+
+* ResNet-RS architectural changes and Swish activation. (Note that ResNet-RS
+ adopts ReLU activation in the paper.)
+* Regularization methods including Random Augment, 4e-5 weight decay, stochastic
+depth, label smoothing and dropout.
+* New training methods including a 350-epoch schedule, cosine learning rate and
+ EMA.
+* Configs are in this [directory](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/image_classification).
+
+| Model | Resolution | Params (M) | Top-1 | Top-5 | Download |
+| --------- | :--------: | ---------: | ----: | ----: | --------:|
+| ResNet-RS-50 | 160x160 | 35.7 | 79.1 | 94.5 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/image_classification/imagenet_resnetrs50_i160.yaml) \| [ckpt](https://storage.cloud.google.com/tf_model_garden/vision/resnet-rs/resnet-rs-50-i160.tar.gz) |
+| ResNet-RS-101 | 160x160 | 63.7 | 80.2 | 94.9 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/image_classification/imagenet_resnetrs101_i160.yaml) \| [ckpt](https://storage.cloud.google.com/tf_model_garden/vision/resnet-rs/resnet-rs-101-i160.tar.gz) |
+| ResNet-RS-101 | 192x192 | 63.7 | 81.3 | 95.6 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/image_classification/imagenet_resnetrs101_i192.yaml) \| [ckpt](https://storage.cloud.google.com/tf_model_garden/vision/resnet-rs/resnet-rs-101-i192.tar.gz) |
+| ResNet-RS-152 | 192x192 | 86.8 | 81.9 | 95.8 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/image_classification/imagenet_resnetrs152_i192.yaml) \| [ckpt](https://storage.cloud.google.com/tf_model_garden/vision/resnet-rs/resnet-rs-152-i192.tar.gz) |
+| ResNet-RS-152 | 224x224 | 86.8 | 82.5 | 96.1 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/image_classification/imagenet_resnetrs152_i224.yaml) \| [ckpt](https://storage.cloud.google.com/tf_model_garden/vision/resnet-rs/resnet-rs-152-i224.tar.gz) |
+| ResNet-RS-152 | 256x256 | 86.8 | 83.1 | 96.3 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/image_classification/imagenet_resnetrs152_i256.yaml) \| [ckpt](https://storage.cloud.google.com/tf_model_garden/vision/resnet-rs/resnet-rs-152-i256.tar.gz) |
+| ResNet-RS-200 | 256x256 | 93.4 | 83.5 | 96.6 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/image_classification/imagenet_resnetrs200_i256.yaml) \| [ckpt](https://storage.cloud.google.com/tf_model_garden/vision/resnet-rs/resnet-rs-200-i256.tar.gz) |
+| ResNet-RS-270 | 256x256 | 130.1 | 83.6 | 96.6 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/image_classification/imagenet_resnetrs270_i256.yaml) \| [ckpt](https://storage.cloud.google.com/tf_model_garden/vision/resnet-rs/resnet-rs-270-i256.tar.gz) |
+| ResNet-RS-350 | 256x256 | 164.3 | 83.7 | 96.7 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/image_classification/imagenet_resnetrs350_i256.yaml) \| [ckpt](https://storage.cloud.google.com/tf_model_garden/vision/resnet-rs/resnet-rs-350-i256.tar.gz) |
+| ResNet-RS-350 | 320x320 | 164.3 | 84.2 | 96.9 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/image_classification/imagenet_resnetrs420_i256.yaml) \| [ckpt](https://storage.cloud.google.com/tf_model_garden/vision/resnet-rs/resnet-rs-350-i320.tar.gz) |
+
+
+
+### Vision Transformer (ViT)
+
+
+
+We support [ViT](https://arxiv.org/abs/2010.11929) and [DEIT](https://arxiv.org/abs/2012.12877) implementations in a TF
+Vision
+[project](https://github.com/tensorflow/models/tree/master/official/projects/vit). ViT models trained under the DEIT settings:
+
+model | resolution | Top-1 | Top-5 |
+--------- | :--------: | ----: | ----: |
+ViT-s16 | 224x224 | 79.4 | 94.7 |
+ViT-b16 | 224x224 | 81.8 | 95.8 |
+ViT-l16 | 224x224 | 82.2 | 95.8 |
+
+
+
+## Object Detection and Instance Segmentation
+
+### Common Settings and Notes
+
+
+
+* We provide models adopting [ResNet-FPN](https://arxiv.org/abs/1612.03144)
+ and [SpineNet](https://arxiv.org/abs/1912.05027) backbones based on
+ detection frameworks:
+ * [RetinaNet](https://arxiv.org/abs/1708.02002) and
+ [RetinaNet-RS](https://arxiv.org/abs/2107.00057)
+ * [Mask R-CNN](https://arxiv.org/abs/1703.06870)
+ * [Cascade RCNN](https://arxiv.org/abs/1712.00726) and
+ [Cascade RCNN-RS](https://arxiv.org/abs/2107.00057)
+* Models are all trained on [COCO](https://cocodataset.org/) train2017 and
+ evaluated on [COCO](https://cocodataset.org/) val2017.
+* Training details:
+ * Models finetuned from [ImageNet](https://www.image-net.org/) pretrained
+ checkpoints adopt the 12 or 36 epochs schedule. Models trained from
+ scratch adopt the 350 epochs schedule.
+ * The default training data augmentation implements horizontal flipping
+ and scale jittering with a random scale between [0.5, 2.0].
+ * Unless noted, all models are trained with l2 weight regularization and
+ ReLU activation.
+ * We use batch size 256 and stepwise learning rate that decays at the last
+ 30 and 10 epoch.
+ * We use square image as input by resizing the long side of an image to
+ the target size then padding the short side with zeros.
+
+
+
+## COCO Object Detection Baselines
+
+### RetinaNet (ImageNet pretrained)
+
+
+
+| Backbone | Resolution | Epochs | FLOPs (B) | Params (M) | Box AP | Download |
+| ------------ |:-------------:| -------:|--------------:|-----------:|-------:|---------:|
+| R50-FPN | 640x640 | 12 | 97.0 | 34.0 | 34.3 | config|
+| R50-FPN | 640x640 | 72 | 97.0 | 34.0 | 36.8 | config \| [ckpt](https://storage.cloud.google.com/tf_model_garden/vision/retinanet/retinanet-resnet50fpn.tar.gz) |
+
+
+
+### RetinaNet (Trained from scratch)
+
+
+
+training features including:
+* Stochastic depth with drop rate 0.2.
+* Swish activation.
+
+| Backbone | Resolution | Epochs | FLOPs (B) | Params (M) | Box AP | Download |
+| ------------ |:-------------:| -------:|--------------:|-----------:|--------:|---------:|
+| SpineNet-49 | 640x640 | 500 | 85.4| 28.5 | 44.2 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/retinanet/coco_spinenet49_tpu.yaml) \| [TB.dev](https://tensorboard.dev/experiment/n2UN83TkTdyKZn3slCWulg/#scalars&_smoothingWeight=0)|
+| SpineNet-96 | 1024x1024 | 500 | 265.4 | 43.0 | 48.5 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/retinanet/coco_spinenet96_tpu.yaml) \| [TB.dev](https://tensorboard.dev/experiment/n2UN83TkTdyKZn3slCWulg/#scalars&_smoothingWeight=0)|
+| SpineNet-143 | 1280x1280 | 500 | 524.0 | 67.0 | 50.0 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/retinanet/coco_spinenet143_tpu.yaml) \| [TB.dev](https://tensorboard.dev/experiment/n2UN83TkTdyKZn3slCWulg/#scalars&_smoothingWeight=0)|
+
+
+
+### Mobile-size RetinaNet (Trained from scratch):
+
+
+
+| Backbone | Resolution | Epochs | FLOPs (B) | Params (M) | Box AP | Download |
+| ----------- | :--------: | -----: | --------: | ---------: | -----: | --------:|
+| MobileNetv2 | 256x256 | 600 | - | 2.27 | 23.5 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/retinanet/coco_mobilenetv2_tpu.yaml) |
+| Mobile SpineNet-49 | 384x384 | 600 | 1.0 | 2.32 | 28.1 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/retinanet/coco_spinenet49_mobile_tpu.yaml) \| [ckpt](https://storage.cloud.google.com/tf_model_garden/vision/retinanet/spinenet49mobile.tar.gz) |
+
+
+
+## Instance Segmentation Baselines
+
+### Mask R-CNN (Trained from scratch)
+
+
+
+| Backbone | Resolution | Epochs | FLOPs (B) | Params (M) | Box AP | Mask AP | Download |
+| ------------ |:-------------:| -------:|-----------:|-----------:|-------:|--------:|---------:|
+| ResNet50-FPN | 640x640 | 350 | 227.7 | 46.3 | 42.3 | 37.6 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/maskrcnn/r50fpn_640_coco_scratch_tpu4x4.yaml) |
+| SpineNet-49 | 640x640 | 350 | 215.7 | 40.8 | 42.6 | 37.9 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/maskrcnn/coco_spinenet49_mrcnn_tpu.yaml) |
+| SpineNet-96 | 1024x1024 | 500 | 315.0 | 55.2 | 48.1 | 42.4 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/maskrcnn/coco_spinenet96_mrcnn_tpu.yaml) |
+| SpineNet-143 | 1280x1280 | 500 | 498.8 | 79.2 | 49.3 | 43.4 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/maskrcnn/coco_spinenet143_mrcnn_tpu.yaml) |
+
+
+
+### Cascade RCNN-RS (Trained from scratch)
+
+
+
+| Backbone | Resolution | Epochs | Params (M) | Box AP | Mask AP | Download
+------------ | :--------: | -----: | ---------: | -----: | ------: | -------:
+| SpineNet-49 | 640x640 | 500 | 56.4 | 46.4 | 40.0 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/maskrcnn/coco_spinenet49_cascadercnn_tpu.yaml)|
+| SpineNet-96 | 1024x1024 | 500 | 70.8 | 50.9 | 43.8 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/maskrcnn/coco_spinenet96_cascadercnn_tpu.yaml)|
+| SpineNet-143 | 1280x1280 | 500 | 94.9 | 51.9 | 45.0 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/maskrcnn/coco_spinenet143_cascadercnn_tpu.yaml)|
+
+
+
+## Semantic Segmentation
+
+* We support [DeepLabV3](https://arxiv.org/pdf/1706.05587.pdf) and
+ [DeepLabV3+](https://arxiv.org/pdf/1802.02611.pdf) architectures, with
+ Dilated ResNet backbones.
+* Backbones are pre-trained on ImageNet.
+
+### PASCAL-VOC
+
+
+
+| Model | Backbone | Resolution | Steps | mIoU | Download |
+| ---------- | :----------------: | :--------: | ----: | ---: | --------:|
+| DeepLabV3 | Dilated Resnet-101 | 512x512 | 30k | 78.7 | |
+| DeepLabV3+ | Dilated Resnet-101 | 512x512 | 30k | 79.2 | |
+
+
+
+### CITYSCAPES
+
+
+
+| Model | Backbone | Resolution | Steps | mIoU | Download |
+| ---------- | :----------------: | :--------: | ----: | ----: | --------:|
+| DeepLabV3+ | Dilated Resnet-101 | 1024x2048 | 90k | 78.79 | |
+
+
+
+## Video Classification
+
+### Common Settings and Notes
+
+
+
+* We provide models for video classification with backbones:
+ * SlowOnly in
+ [SlowFast Networks for Video Recognition](https://arxiv.org/abs/1812.03982).
+ * ResNet-3D (R3D) in
+ [Spatiotemporal Contrastive Video Representation Learning](https://arxiv.org/abs/2008.03800).
+ * ResNet-3D-RS (R3D-RS) in
+ [Revisiting 3D ResNets for Video Recognition](https://arxiv.org/pdf/2109.01696.pdf).
+ * Mobile Video Networks (MoViNets) in
+ [MoViNets: Mobile Video Networks for Efficient Video Recognition](https://arxiv.org/abs/2103.11511).
+
+* Training and evaluation details (SlowFast and ResNet):
+ * All models are trained from scratch with vision modality (RGB) for 200
+ epochs.
+ * We use batch size of 1024 and cosine learning rate decay with linear warmup
+ in first 5 epochs.
+ * We follow [SlowFast](https://arxiv.org/abs/1812.03982) to perform 30-view
+ evaluation.
+
+
+
+### Kinetics-400 Action Recognition Baselines
+
+
+
+| Model | Input (frame x stride) | Top-1 | Top-5 | Download |
+| -------- |:----------------------:|--------:|--------:|---------:|
+| SlowOnly | 8 x 8 | 74.1 | 91.4 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/video_classification/k400_slowonly8x8_tpu.yaml) |
+| SlowOnly | 16 x 4 | 75.6 | 92.1 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/video_classification/k400_slowonly16x4_tpu.yaml) |
+| R3D-50 | 32 x 2 | 77.0 | 93.0 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/video_classification/k400_3d-resnet50_tpu.yaml) |
+| R3D-RS-50 | 32 x 2 | 78.2 | 93.7 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/video_classification/k400_resnet3drs_50_tpu.yaml) |
+| R3D-RS-101 | 32 x 2 | 79.5 | 94.2 | -
+| R3D-RS-152 | 32 x 2 | 79.9 | 94.3 | -
+| R3D-RS-200 | 32 x 2 | 80.4 | 94.4 | -
+| R3D-RS-200 | 48 x 2 | 81.0 | - | -
+| MoViNet-A0-Base | 50 x 5 | 69.40 | 89.18 | -
+| MoViNet-A1-Base | 50 x 5 | 74.57 | 92.03 | -
+| MoViNet-A2-Base | 50 x 5 | 75.91 | 92.63 | -
+| MoViNet-A3-Base | 120 x 2 | 79.34 | 94.52 | -
+| MoViNet-A4-Base | 80 x 3 | 80.64 | 94.93 | -
+| MoViNet-A5-Base | 120 x 2 | 81.39 | 95.06 | -
+
+
+
+### Kinetics-600 Action Recognition Baselines
+
+
+
+| Model | Input (frame x stride) | Top-1 | Top-5 | Download |
+| -------- |:----------------------:|--------:|--------:|---------:|
+| SlowOnly | 8 x 8 | 77.3 | 93.6 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/video_classification/k600_slowonly8x8_tpu.yaml) |
+| R3D-50 | 32 x 2 | 79.5 | 94.8 | [config](https://github.com/tensorflow/models/blob/master/official/vision/configs/experiments/video_classification/k600_3d-resnet50_tpu.yaml) |
+| R3D-RS-200 | 32 x 2 | 83.1 | - | -
+| R3D-RS-200 | 48 x 2 | 83.8 | - | -
+| MoViNet-A0-Base | 50 x 5 | 72.05 | 90.92 | [config](https://github.com/tensorflow/models/blob/master/official/projects/movinet/configs/yaml/movinet_a0_k600_8x8.yaml) |
+| MoViNet-A1-Base | 50 x 5 | 76.69 | 93.40 | [config](https://github.com/tensorflow/models/blob/master/official/projects/movinet/configs/yaml/movinet_a1_k600_8x8.yaml) |
+| MoViNet-A2-Base | 50 x 5 | 78.62 | 94.17 | [config](https://github.com/tensorflow/models/blob/master/official/projects/movinet/configs/yaml/movinet_a2_k600_8x8.yaml) |
+| MoViNet-A3-Base | 120 x 2 | 81.79 | 95.67 | [config](https://github.com/tensorflow/models/blob/master/official/projects/movinet/configs/yaml/movinet_a3_k600_8x8.yaml) |
+| MoViNet-A4-Base | 80 x 3 | 83.48 | 96.16 | [config](https://github.com/tensorflow/models/blob/master/official/projects/movinet/configs/yaml/movinet_a4_k600_8x8.yaml) |
+| MoViNet-A5-Base | 120 x 2 | 84.27 | 96.39 | [config](https://github.com/tensorflow/models/blob/master/official/projects/movinet/configs/yaml/movinet_a5_k600_8x8.yaml) |
+
diff --git a/official/vision/beta/README.md b/official/vision/beta/README.md
deleted file mode 100644
index 065323b844c30c1e01b803694ec010dbae077380..0000000000000000000000000000000000000000
--- a/official/vision/beta/README.md
+++ /dev/null
@@ -1 +0,0 @@
-This directory contains the new design of TF model garden vision framework.
diff --git a/official/vision/beta/__init__.py b/official/vision/beta/__init__.py
deleted file mode 100644
index 16339134fd7f5c0a5d52a16401c085b3db2662bf..0000000000000000000000000000000000000000
--- a/official/vision/beta/__init__.py
+++ /dev/null
@@ -1,19 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Vision package definition."""
-# Lint as: python3
-# pylint: disable=unused-import
-from official.vision.beta import configs
-from official.vision.beta import tasks
diff --git a/official/vision/beta/configs/__init__.py b/official/vision/beta/configs/__init__.py
deleted file mode 100644
index 0a55922c7069b61bb94a9a600b66613b04002b40..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/__init__.py
+++ /dev/null
@@ -1,22 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Configs package definition."""
-
-from official.vision.beta.configs import image_classification
-from official.vision.beta.configs import maskrcnn
-from official.vision.beta.configs import retinanet
-from official.vision.beta.configs import semantic_segmentation
-from official.vision.beta.configs import video_classification
diff --git a/official/vision/beta/configs/backbones.py b/official/vision/beta/configs/backbones.py
deleted file mode 100644
index a782ec707d79ff4187caa9bdde28ccac4505a51a..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/backbones.py
+++ /dev/null
@@ -1,132 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Backbones configurations."""
-import dataclasses
-from typing import Optional, List
-
-# Import libraries
-
-from official.modeling import hyperparams
-
-
-@dataclasses.dataclass
-class ResNet(hyperparams.Config):
- """ResNet config."""
- model_id: int = 50
- depth_multiplier: float = 1.0
- stem_type: str = 'v0'
- se_ratio: float = 0.0
- stochastic_depth_drop_rate: float = 0.0
- scale_stem: bool = True
- resnetd_shortcut: bool = False
- replace_stem_max_pool: bool = False
- bn_trainable: bool = True
-
-
-@dataclasses.dataclass
-class DilatedResNet(hyperparams.Config):
- """DilatedResNet config."""
- model_id: int = 50
- output_stride: int = 16
- multigrid: Optional[List[int]] = None
- stem_type: str = 'v0'
- last_stage_repeats: int = 1
- se_ratio: float = 0.0
- stochastic_depth_drop_rate: float = 0.0
-
-
-@dataclasses.dataclass
-class EfficientNet(hyperparams.Config):
- """EfficientNet config."""
- model_id: str = 'b0'
- se_ratio: float = 0.0
- stochastic_depth_drop_rate: float = 0.0
-
-
-@dataclasses.dataclass
-class MobileNet(hyperparams.Config):
- """Mobilenet config."""
- model_id: str = 'MobileNetV2'
- filter_size_scale: float = 1.0
- stochastic_depth_drop_rate: float = 0.0
- output_stride: Optional[int] = None
- output_intermediate_endpoints: bool = False
-
-
-@dataclasses.dataclass
-class SpineNet(hyperparams.Config):
- """SpineNet config."""
- model_id: str = '49'
- stochastic_depth_drop_rate: float = 0.0
- min_level: int = 3
- max_level: int = 7
-
-
-@dataclasses.dataclass
-class SpineNetMobile(hyperparams.Config):
- """SpineNet config."""
- model_id: str = '49'
- stochastic_depth_drop_rate: float = 0.0
- se_ratio: float = 0.2
- expand_ratio: int = 6
- min_level: int = 3
- max_level: int = 7
- # If use_keras_upsampling_2d is True, model uses UpSampling2D keras layer
- # instead of optimized custom TF op. It makes model be more keras style. We
- # set this flag to True when we apply QAT from model optimization toolkit
- # that requires the model should use keras layers.
- use_keras_upsampling_2d: bool = False
-
-
-@dataclasses.dataclass
-class RevNet(hyperparams.Config):
- """RevNet config."""
- # Specifies the depth of RevNet.
- model_id: int = 56
-
-
-@dataclasses.dataclass
-class MobileDet(hyperparams.Config):
- """Mobiledet config."""
- model_id: str = 'MobileDetCPU'
- filter_size_scale: float = 1.0
-
-
-@dataclasses.dataclass
-class Backbone(hyperparams.OneOfConfig):
- """Configuration for backbones.
-
- Attributes:
- type: 'str', type of backbone be used, one of the fields below.
- resnet: resnet backbone config.
- dilated_resnet: dilated resnet backbone for semantic segmentation config.
- revnet: revnet backbone config.
- efficientnet: efficientnet backbone config.
- spinenet: spinenet backbone config.
- spinenet_mobile: mobile spinenet backbone config.
- mobilenet: mobilenet backbone config.
- mobiledet: mobiledet backbone config.
- """
- type: Optional[str] = None
- resnet: ResNet = ResNet()
- dilated_resnet: DilatedResNet = DilatedResNet()
- revnet: RevNet = RevNet()
- efficientnet: EfficientNet = EfficientNet()
- spinenet: SpineNet = SpineNet()
- spinenet_mobile: SpineNetMobile = SpineNetMobile()
- mobilenet: MobileNet = MobileNet()
- mobiledet: MobileDet = MobileDet()
-
diff --git a/official/vision/beta/configs/backbones_3d.py b/official/vision/beta/configs/backbones_3d.py
deleted file mode 100644
index 3f6a0020ab984a6fc662f6d3923986082215f93e..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/backbones_3d.py
+++ /dev/null
@@ -1,107 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""3D Backbones configurations."""
-from typing import Optional, Tuple
-
-# Import libraries
-import dataclasses
-
-from official.modeling import hyperparams
-
-
-@dataclasses.dataclass
-class ResNet3DBlock(hyperparams.Config):
- """Configuration of a ResNet 3D block."""
- temporal_strides: int = 1
- temporal_kernel_sizes: Tuple[int, ...] = ()
- use_self_gating: bool = False
-
-
-@dataclasses.dataclass
-class ResNet3D(hyperparams.Config):
- """ResNet config."""
- model_id: int = 50
- stem_type: str = 'v0'
- stem_conv_temporal_kernel_size: int = 5
- stem_conv_temporal_stride: int = 2
- stem_pool_temporal_stride: int = 2
- block_specs: Tuple[ResNet3DBlock, ...] = ()
- stochastic_depth_drop_rate: float = 0.0
- se_ratio: float = 0.0
-
-
-@dataclasses.dataclass
-class ResNet3D50(ResNet3D):
- """Block specifications of the Resnet50 (3D) model."""
- model_id: int = 50
- block_specs: Tuple[
- ResNet3DBlock, ResNet3DBlock, ResNet3DBlock, ResNet3DBlock] = (
- ResNet3DBlock(temporal_strides=1,
- temporal_kernel_sizes=(3, 3, 3),
- use_self_gating=True),
- ResNet3DBlock(temporal_strides=1,
- temporal_kernel_sizes=(3, 1, 3, 1),
- use_self_gating=True),
- ResNet3DBlock(temporal_strides=1,
- temporal_kernel_sizes=(3, 1, 3, 1, 3, 1),
- use_self_gating=True),
- ResNet3DBlock(temporal_strides=1,
- temporal_kernel_sizes=(1, 3, 1),
- use_self_gating=True))
-
-
-@dataclasses.dataclass
-class ResNet3DRS(ResNet3D):
- """Block specifications of the ResNet-RS (3D) model."""
- model_id: int = 50
- stem_type: str = 'v1'
- stem_conv_temporal_kernel_size: int = 5
- stem_conv_temporal_stride: int = 2
- stem_pool_temporal_stride: int = 2
- stochastic_depth_drop_rate: float = 0.1
- se_ratio: float = 0.2
- block_specs: Tuple[
- ResNet3DBlock, ResNet3DBlock, ResNet3DBlock, ResNet3DBlock] = (
- ResNet3DBlock(temporal_strides=1,
- temporal_kernel_sizes=(1,),
- use_self_gating=True),
- ResNet3DBlock(temporal_strides=1,
- temporal_kernel_sizes=(1,),
- use_self_gating=True),
- ResNet3DBlock(temporal_strides=1,
- temporal_kernel_sizes=(3,),
- use_self_gating=True),
- ResNet3DBlock(temporal_strides=1,
- temporal_kernel_sizes=(3,),
- use_self_gating=True))
-
-
-_RESNET3D50_DEFAULT_CFG = ResNet3D50()
-_RESNET3DRS_DEFAULT_CFG = ResNet3DRS()
-
-
-@dataclasses.dataclass
-class Backbone3D(hyperparams.OneOfConfig):
- """Configuration for backbones.
-
- Attributes:
- type: 'str', type of backbone be used, one of the fields below.
- resnet_3d: resnet3d backbone config.
- resnet_3d_rs: resnet3d-rs backbone config.
- """
- type: Optional[str] = None
- resnet_3d: ResNet3D = _RESNET3D50_DEFAULT_CFG
- resnet_3d_rs: ResNet3D = _RESNET3DRS_DEFAULT_CFG
diff --git a/official/vision/beta/configs/common.py b/official/vision/beta/configs/common.py
deleted file mode 100644
index 550969e9cd9c88811db1bc6d67c7dde7c5818da3..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/common.py
+++ /dev/null
@@ -1,137 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Common configurations."""
-
-import dataclasses
-from typing import List, Optional
-
-# Import libraries
-
-from official.core import config_definitions as cfg
-from official.modeling import hyperparams
-
-
-@dataclasses.dataclass
-class TfExampleDecoder(hyperparams.Config):
- """A simple TF Example decoder config."""
- regenerate_source_id: bool = False
- mask_binarize_threshold: Optional[float] = None
-
-
-@dataclasses.dataclass
-class TfExampleDecoderLabelMap(hyperparams.Config):
- """TF Example decoder with label map config."""
- regenerate_source_id: bool = False
- mask_binarize_threshold: Optional[float] = None
- label_map: str = ''
-
-
-@dataclasses.dataclass
-class DataDecoder(hyperparams.OneOfConfig):
- """Data decoder config.
-
- Attributes:
- type: 'str', type of data decoder be used, one of the fields below.
- simple_decoder: simple TF Example decoder config.
- label_map_decoder: TF Example decoder with label map config.
- """
- type: Optional[str] = 'simple_decoder'
- simple_decoder: TfExampleDecoder = TfExampleDecoder()
- label_map_decoder: TfExampleDecoderLabelMap = TfExampleDecoderLabelMap()
-
-
-@dataclasses.dataclass
-class RandAugment(hyperparams.Config):
- """Configuration for RandAugment."""
- num_layers: int = 2
- magnitude: float = 10
- cutout_const: float = 40
- translate_const: float = 10
- magnitude_std: float = 0.0
- prob_to_apply: Optional[float] = None
- exclude_ops: List[str] = dataclasses.field(default_factory=list)
-
-
-@dataclasses.dataclass
-class AutoAugment(hyperparams.Config):
- """Configuration for AutoAugment."""
- augmentation_name: str = 'v0'
- cutout_const: float = 100
- translate_const: float = 250
-
-
-@dataclasses.dataclass
-class RandomErasing(hyperparams.Config):
- """Configuration for RandomErasing."""
- probability: float = 0.25
- min_area: float = 0.02
- max_area: float = 1 / 3
- min_aspect: float = 0.3
- max_aspect = None
- min_count = 1
- max_count = 1
- trials = 10
-
-
-@dataclasses.dataclass
-class MixupAndCutmix(hyperparams.Config):
- """Configuration for MixupAndCutmix."""
- mixup_alpha: float = .8
- cutmix_alpha: float = 1.
- prob: float = 1.0
- switch_prob: float = 0.5
- label_smoothing: float = 0.1
-
-
-@dataclasses.dataclass
-class Augmentation(hyperparams.OneOfConfig):
- """Configuration for input data augmentation.
-
- Attributes:
- type: 'str', type of augmentation be used, one of the fields below.
- randaug: RandAugment config.
- autoaug: AutoAugment config.
- """
- type: Optional[str] = None
- randaug: RandAugment = RandAugment()
- autoaug: AutoAugment = AutoAugment()
-
-
-@dataclasses.dataclass
-class NormActivation(hyperparams.Config):
- activation: str = 'relu'
- use_sync_bn: bool = True
- norm_momentum: float = 0.99
- norm_epsilon: float = 0.001
-
-
-@dataclasses.dataclass
-class PseudoLabelDataConfig(cfg.DataConfig):
- """Psuedo Label input config for training."""
- input_path: str = ''
- data_ratio: float = 1.0 # Per-batch ratio of pseudo-labeled to labeled data.
- is_training: bool = True
- dtype: str = 'float32'
- shuffle_buffer_size: int = 10000
- cycle_length: int = 10
- aug_rand_hflip: bool = True
- aug_type: Optional[
- Augmentation] = None # Choose from AutoAugment and RandAugment.
- file_type: str = 'tfrecord'
-
- # Keep for backward compatibility.
- aug_policy: Optional[str] = None # None, 'autoaug', or 'randaug'.
- randaug_magnitude: Optional[int] = 10
diff --git a/official/vision/beta/configs/decoders.py b/official/vision/beta/configs/decoders.py
deleted file mode 100644
index 23733a277f78c0afefe6040d62400cd32314b460..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/decoders.py
+++ /dev/null
@@ -1,72 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Decoders configurations."""
-import dataclasses
-from typing import List, Optional
-
-# Import libraries
-
-from official.modeling import hyperparams
-
-
-@dataclasses.dataclass
-class Identity(hyperparams.Config):
- """Identity config."""
- pass
-
-
-@dataclasses.dataclass
-class FPN(hyperparams.Config):
- """FPN config."""
- num_filters: int = 256
- fusion_type: str = 'sum'
- use_separable_conv: bool = False
-
-
-@dataclasses.dataclass
-class NASFPN(hyperparams.Config):
- """NASFPN config."""
- num_filters: int = 256
- num_repeats: int = 5
- use_separable_conv: bool = False
-
-
-@dataclasses.dataclass
-class ASPP(hyperparams.Config):
- """ASPP config."""
- level: int = 4
- dilation_rates: List[int] = dataclasses.field(default_factory=list)
- dropout_rate: float = 0.0
- num_filters: int = 256
- use_depthwise_convolution: bool = False
- pool_kernel_size: Optional[List[int]] = None # Use global average pooling.
- spp_layer_version: str = 'v1'
- output_tensor: bool = False
-
-
-@dataclasses.dataclass
-class Decoder(hyperparams.OneOfConfig):
- """Configuration for decoders.
-
- Attributes:
- type: 'str', type of decoder be used, one of the fields below.
- fpn: fpn config.
- """
- type: Optional[str] = None
- fpn: FPN = FPN()
- nasfpn: NASFPN = NASFPN()
- identity: Identity = Identity()
- aspp: ASPP = ASPP()
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_mobilenetv2_gpu.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_mobilenetv2_gpu.yaml
deleted file mode 100644
index ff1a0719e6f179c98674ba7723bd1695aaa90241..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_mobilenetv2_gpu.yaml
+++ /dev/null
@@ -1,49 +0,0 @@
-# MobileNetV2_1.0 ImageNet classification. 71.0% top-1 and 90.0% top-5 accuracy.
-runtime:
- distribution_strategy: 'mirrored'
- mixed_precision_dtype: 'float16'
- loss_scale: 'dynamic'
-task:
- model:
- num_classes: 1001
- input_size: [224, 224, 3]
- backbone:
- type: 'mobilenet'
- mobilenet:
- model_id: 'MobileNetV2'
- filter_size_scale: 1.0
- dropout_rate: 0.2
- losses:
- l2_weight_decay: 0.00001
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 1024 # 128 * 8
- dtype: 'float16'
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 1024 # 128 * 8
- dtype: 'float16'
- drop_remainder: false
-trainer:
- train_steps: 625500 # 500 epochs
- validation_steps: 49
- validation_interval: 1251
- steps_per_loop: 1251 # NUM_EXAMPLES (1281167) // global_batch_size
- summary_interval: 1251
- checkpoint_interval: 1251
- optimizer_config:
- learning_rate:
- type: 'exponential'
- exponential:
- initial_learning_rate: 0.064 # 0.008 * batch_size / 128
- decay_steps: 3127 # 2.5 * steps_per_epoch
- decay_rate: 0.96
- staircase: true
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 6255
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_mobilenetv2_tpu.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_mobilenetv2_tpu.yaml
deleted file mode 100644
index b5df9d6e74a44617b91625042f5821fe8c967d9f..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_mobilenetv2_tpu.yaml
+++ /dev/null
@@ -1,48 +0,0 @@
-# MobileNetV2_1.0 ImageNet classification. 72.72% top-1 and 91.05% top-5 accuracy.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [224, 224, 3]
- backbone:
- type: 'mobilenet'
- mobilenet:
- model_id: 'MobileNetV2'
- filter_size_scale: 1.0
- dropout_rate: 0.2
- losses:
- l2_weight_decay: 0.00001
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- train_steps: 156000 # 500 epochs
- validation_steps: 13
- validation_interval: 312
- steps_per_loop: 312 # NUM_EXAMPLES (1281167) // global_batch_size
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- learning_rate:
- type: 'exponential'
- exponential:
- initial_learning_rate: 0.256 # 0.008 * batch_size / 128
- decay_steps: 780 # 2.5 * steps_per_epoch
- decay_rate: 0.96
- staircase: true
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 1560
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_mobilenetv3large_tpu.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_mobilenetv3large_tpu.yaml
deleted file mode 100644
index a8fb0c95d55f7eec2b45f076881e9beb6ee559dc..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_mobilenetv3large_tpu.yaml
+++ /dev/null
@@ -1,53 +0,0 @@
-# MobileNetV3-large_1.0 ImageNet classification: 74.96% top-1.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [224, 224, 3]
- backbone:
- type: 'mobilenet'
- mobilenet:
- model_id: 'MobileNetV3Large'
- filter_size_scale: 1.0
- dropout_rate: 0.2
- losses:
- l2_weight_decay: 0.00001
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- # Enables Inception-style pre-processing.
- decode_jpeg_only: false
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
- # Enables Inception-style pre-processing.
- decode_jpeg_only: false
-trainer:
- train_steps: 156000 # 500 epochs
- validation_steps: 13
- validation_interval: 312
- steps_per_loop: 312 # NUM_EXAMPLES (1281167) // global_batch_size
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- learning_rate:
- type: 'cosine'
- cosine:
- alpha: 0.0
- decay_steps: 156000
- initial_learning_rate: 0.5
- name: CosineDecay
- offset: 0
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 5000
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_mobilenetv3small_tpu.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_mobilenetv3small_tpu.yaml
deleted file mode 100644
index 57466795214da5fbb96eb9c3d9f486a1ba0fa09b..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_mobilenetv3small_tpu.yaml
+++ /dev/null
@@ -1,63 +0,0 @@
-# MobileNetV3Small ImageNet classification. 67.5% top-1 and 87.6% top-5 accuracy.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [224, 224, 3]
- backbone:
- type: 'mobilenet'
- mobilenet:
- model_id: 'MobileNetV3Small'
- filter_size_scale: 1.0
- norm_activation:
- activation: 'relu'
- norm_momentum: 0.997
- norm_epsilon: 0.001
- use_sync_bn: false
- dropout_rate: 0.2
- losses:
- l2_weight_decay: 0.00001
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- train_steps: 312000 # 1000 epochs
- validation_steps: 12
- validation_interval: 312
- steps_per_loop: 312 # NUM_EXAMPLES (1281167) // global_batch_size
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- optimizer:
- type: 'rmsprop'
- rmsprop:
- rho: 0.9
- momentum: 0.9
- epsilon: 0.002
- learning_rate:
- type: 'exponential'
- exponential:
- initial_learning_rate: 0.01
- decay_steps: 936 # 3 * steps_per_epoch
- decay_rate: 0.99
- staircase: true
- ema:
- average_decay: 0.9999
- trainable_weights_only: false
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 1560
- warmup_learning_rate: 0.001
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_resnet101_deeplab_tpu.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_resnet101_deeplab_tpu.yaml
deleted file mode 100644
index 5d7d295963752ff64ee39e6d159eb99831da3306..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_resnet101_deeplab_tpu.yaml
+++ /dev/null
@@ -1,57 +0,0 @@
-# Top-1 accuracy 81.6% on ImageNet
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [224, 224, 3]
- backbone:
- type: 'dilated_resnet'
- dilated_resnet:
- model_id: 101
- output_stride: 16
- stem_type: 'v1'
- se_ratio: 0.25
- stochastic_depth_drop_rate: 0.2
- multigrid: [1, 2, 4]
- last_stage_repeats: 1
- norm_activation:
- activation: 'swish'
- losses:
- l2_weight_decay: 0.00004
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- aug_policy: 'randaug'
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- train_steps: 109200
- validation_steps: 13
- validation_interval: 312
- steps_per_loop: 312
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- optimizer:
- type: 'sgd'
- sgd:
- momentum: 0.9
- learning_rate:
- type: 'cosine'
- cosine:
- initial_learning_rate: 1.6
- decay_steps: 109200
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 1560
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_resnet101_tpu.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_resnet101_tpu.yaml
deleted file mode 100644
index 2600f58faa595d2100bc0325c7c4fdc83c9517c1..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_resnet101_tpu.yaml
+++ /dev/null
@@ -1,50 +0,0 @@
-# ResNet-101 ImageNet classification. 79.1% top-1 and 94.5% top-5 accuracy.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [224, 224, 3]
- backbone:
- type: 'resnet'
- resnet:
- model_id: 101
- norm_activation:
- activation: 'swish'
- losses:
- l2_weight_decay: 0.0001
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- train_steps: 62400
- validation_steps: 13
- validation_interval: 312
- steps_per_loop: 312
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- optimizer:
- type: 'sgd'
- sgd:
- momentum: 0.9
- learning_rate:
- type: 'cosine'
- cosine:
- initial_learning_rate: 1.6
- decay_steps: 62400
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 1560
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_resnet152_tpu.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_resnet152_tpu.yaml
deleted file mode 100644
index 1c81953e2f6c06eb1d67a619d3106c7195da4e20..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_resnet152_tpu.yaml
+++ /dev/null
@@ -1,50 +0,0 @@
-# ResNet-152 ImageNet classification. 79.4% top-1 and 94.7% top-5 accuracy.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [224, 224, 3]
- backbone:
- type: 'resnet'
- resnet:
- model_id: 152
- norm_activation:
- activation: 'swish'
- losses:
- l2_weight_decay: 0.0001
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- train_steps: 62400
- validation_steps: 13
- validation_interval: 312
- steps_per_loop: 312
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- optimizer:
- type: 'sgd'
- sgd:
- momentum: 0.9
- learning_rate:
- type: 'cosine'
- cosine:
- initial_learning_rate: 1.6
- decay_steps: 62400
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 1560
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_resnet50_deeplab_tpu.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_resnet50_deeplab_tpu.yaml
deleted file mode 100644
index 11bdafbc35d4c6f63625b5990de0167a78a7e6b0..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_resnet50_deeplab_tpu.yaml
+++ /dev/null
@@ -1,50 +0,0 @@
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [224, 224, 3]
- backbone:
- type: 'dilated_resnet'
- dilated_resnet:
- model_id: 50
- output_stride: 16
- norm_activation:
- activation: 'swish'
- losses:
- l2_weight_decay: 0.0001
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- train_steps: 62400
- validation_steps: 13
- validation_interval: 312
- steps_per_loop: 312
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- optimizer:
- type: 'sgd'
- sgd:
- momentum: 0.9
- learning_rate:
- type: 'cosine'
- cosine:
- initial_learning_rate: 1.6
- decay_steps: 62400
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 1560
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_resnet50_gpu.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_resnet50_gpu.yaml
deleted file mode 100644
index dd6a4dc1618bfa4dbcd30410966ee365284b7cf8..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_resnet50_gpu.yaml
+++ /dev/null
@@ -1,48 +0,0 @@
-runtime:
- distribution_strategy: 'mirrored'
- mixed_precision_dtype: 'float16'
- loss_scale: 'dynamic'
-task:
- model:
- num_classes: 1001
- input_size: [224, 224, 3]
- backbone:
- type: 'resnet'
- resnet:
- model_id: 50
- losses:
- l2_weight_decay: 0.0001
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 2048
- dtype: 'float16'
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 2048
- dtype: 'float16'
- drop_remainder: false
-trainer:
- train_steps: 56160
- validation_steps: 25
- validation_interval: 625
- steps_per_loop: 625
- summary_interval: 625
- checkpoint_interval: 625
- optimizer_config:
- optimizer:
- type: 'sgd'
- sgd:
- momentum: 0.9
- learning_rate:
- type: 'stepwise'
- stepwise:
- boundaries: [18750, 37500, 50000]
- values: [0.8, 0.08, 0.008, 0.0008]
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 3125
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_resnet50_tfds_tpu.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_resnet50_tfds_tpu.yaml
deleted file mode 100644
index 1506b48f903b0966e52e309b4be9f8cfc1faca6a..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_resnet50_tfds_tpu.yaml
+++ /dev/null
@@ -1,56 +0,0 @@
-# ResNet-50 ImageNet classification. 78.1% top-1 and 93.9% top-5 accuracy.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [224, 224, 3]
- backbone:
- type: 'resnet'
- resnet:
- model_id: 50
- norm_activation:
- activation: 'swish'
- losses:
- l2_weight_decay: 0.0001
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: ''
- tfds_name: 'imagenet2012'
- tfds_split: 'train'
- sharding: true
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- validation_data:
- input_path: ''
- tfds_name: 'imagenet2012'
- tfds_split: 'validation'
- sharding: true
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- train_steps: 62400
- validation_steps: 13
- validation_interval: 312
- steps_per_loop: 312
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- optimizer:
- type: 'sgd'
- sgd:
- momentum: 0.9
- learning_rate:
- type: 'cosine'
- cosine:
- initial_learning_rate: 1.6
- decay_steps: 62400
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 1560
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_resnet50_tpu.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_resnet50_tpu.yaml
deleted file mode 100644
index 358cafb6df9f083d7cfe8f89040dad2360393d13..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_resnet50_tpu.yaml
+++ /dev/null
@@ -1,47 +0,0 @@
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [224, 224, 3]
- backbone:
- type: 'resnet'
- resnet:
- model_id: 50
- losses:
- l2_weight_decay: 0.0001
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- train_steps: 28080
- validation_steps: 13
- validation_interval: 312
- steps_per_loop: 312
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- optimizer:
- type: 'sgd'
- sgd:
- momentum: 0.9
- learning_rate:
- type: 'stepwise'
- stepwise:
- boundaries: [9360, 18720, 24960]
- values: [1.6, 0.16, 0.016, 0.0016]
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 1560
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs101_i160.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs101_i160.yaml
deleted file mode 100644
index 7c9e7b80a02386093981e584440c8b29ce395b83..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs101_i160.yaml
+++ /dev/null
@@ -1,64 +0,0 @@
-# ResNet-RS-101 ImageNet classification. 80.2% top-1 accuracy.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [160, 160, 3]
- backbone:
- type: 'resnet'
- resnet:
- model_id: 101
- replace_stem_max_pool: true
- resnetd_shortcut: true
- se_ratio: 0.25
- stem_type: 'v1'
- stochastic_depth_drop_rate: 0.0
- norm_activation:
- activation: 'swish'
- norm_momentum: 0.0
- use_sync_bn: false
- dropout_rate: 0.25
- losses:
- l2_weight_decay: 0.00004
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- aug_type:
- type: 'randaug'
- randaug:
- magnitude: 15
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- train_steps: 109200
- validation_steps: 13
- validation_interval: 312
- steps_per_loop: 312
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- ema:
- average_decay: 0.9999
- optimizer:
- type: 'sgd'
- sgd:
- momentum: 0.9
- learning_rate:
- type: 'cosine'
- cosine:
- initial_learning_rate: 1.6
- decay_steps: 109200
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 1560
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs101_i192.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs101_i192.yaml
deleted file mode 100644
index 576c48625055d0e61d948d732cc16d4e5020c131..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs101_i192.yaml
+++ /dev/null
@@ -1,64 +0,0 @@
-# ResNet-RS-101 ImageNet classification. 81.3% top-1 accuracy.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [192, 192, 3]
- backbone:
- type: 'resnet'
- resnet:
- model_id: 101
- replace_stem_max_pool: true
- resnetd_shortcut: true
- se_ratio: 0.25
- stem_type: 'v1'
- stochastic_depth_drop_rate: 0.0
- norm_activation:
- activation: 'swish'
- norm_momentum: 0.0
- use_sync_bn: false
- dropout_rate: 0.25
- losses:
- l2_weight_decay: 0.00004
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- aug_type:
- type: 'randaug'
- randaug:
- magnitude: 15
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- train_steps: 109200
- validation_steps: 13
- validation_interval: 312
- steps_per_loop: 312
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- ema:
- average_decay: 0.9999
- optimizer:
- type: 'sgd'
- sgd:
- momentum: 0.9
- learning_rate:
- type: 'cosine'
- cosine:
- initial_learning_rate: 1.6
- decay_steps: 109200
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 1560
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs152_i192.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs152_i192.yaml
deleted file mode 100644
index b1c8edc463f8ce3150f4414f90d88df28abd77e9..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs152_i192.yaml
+++ /dev/null
@@ -1,64 +0,0 @@
-# ResNet-RS-152 ImageNet classification. 81.9% top-1 accuracy.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [192, 192, 3]
- backbone:
- type: 'resnet'
- resnet:
- model_id: 152
- replace_stem_max_pool: true
- resnetd_shortcut: true
- se_ratio: 0.25
- stem_type: 'v1'
- stochastic_depth_drop_rate: 0.0
- norm_activation:
- activation: 'swish'
- norm_momentum: 0.0
- use_sync_bn: false
- dropout_rate: 0.25
- losses:
- l2_weight_decay: 0.00004
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- aug_type:
- type: 'randaug'
- randaug:
- magnitude: 15
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- train_steps: 109200
- validation_steps: 13
- validation_interval: 312
- steps_per_loop: 312
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- ema:
- average_decay: 0.9999
- optimizer:
- type: 'sgd'
- sgd:
- momentum: 0.9
- learning_rate:
- type: 'cosine'
- cosine:
- initial_learning_rate: 1.6
- decay_steps: 109200
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 1560
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs152_i224.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs152_i224.yaml
deleted file mode 100644
index 2ec14bae5ab2f20867498ff7ba46af855d61f73c..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs152_i224.yaml
+++ /dev/null
@@ -1,64 +0,0 @@
-# ResNet-RS-152 ImageNet classification. 82.5% top-1 accuracy.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [224, 224, 3]
- backbone:
- type: 'resnet'
- resnet:
- model_id: 152
- replace_stem_max_pool: true
- resnetd_shortcut: true
- se_ratio: 0.25
- stem_type: 'v1'
- stochastic_depth_drop_rate: 0.0
- norm_activation:
- activation: 'swish'
- norm_momentum: 0.0
- use_sync_bn: false
- dropout_rate: 0.25
- losses:
- l2_weight_decay: 0.00004
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- aug_type:
- type: 'randaug'
- randaug:
- magnitude: 15
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- train_steps: 109200
- validation_steps: 13
- validation_interval: 312
- steps_per_loop: 312
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- ema:
- average_decay: 0.9999
- optimizer:
- type: 'sgd'
- sgd:
- momentum: 0.9
- learning_rate:
- type: 'cosine'
- cosine:
- initial_learning_rate: 1.6
- decay_steps: 109200
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 1560
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs152_i256.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs152_i256.yaml
deleted file mode 100644
index 91b53d6217f7579b6764ddaf58795f0ee14f58dc..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs152_i256.yaml
+++ /dev/null
@@ -1,64 +0,0 @@
-# ResNet-RS-152 ImageNet classification. 83.1% top-1 accuracy.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [256, 256, 3]
- backbone:
- type: 'resnet'
- resnet:
- model_id: 152
- replace_stem_max_pool: true
- resnetd_shortcut: true
- se_ratio: 0.25
- stem_type: 'v1'
- stochastic_depth_drop_rate: 0.0
- norm_activation:
- activation: 'swish'
- norm_momentum: 0.0
- use_sync_bn: false
- dropout_rate: 0.25
- losses:
- l2_weight_decay: 0.00004
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- aug_type:
- type: 'randaug'
- randaug:
- magnitude: 15
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- train_steps: 109200
- validation_steps: 13
- validation_interval: 312
- steps_per_loop: 312
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- ema:
- average_decay: 0.9999
- optimizer:
- type: 'sgd'
- sgd:
- momentum: 0.9
- learning_rate:
- type: 'cosine'
- cosine:
- initial_learning_rate: 1.6
- decay_steps: 109200
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 1560
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs200_i256.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs200_i256.yaml
deleted file mode 100644
index 9d76c010170070426745607aa2690799136c0665..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs200_i256.yaml
+++ /dev/null
@@ -1,64 +0,0 @@
-# ResNet-RS-200 ImageNet classification. 83.5% top-1 accuracy.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [256, 256, 3]
- backbone:
- type: 'resnet'
- resnet:
- model_id: 200
- replace_stem_max_pool: true
- resnetd_shortcut: true
- se_ratio: 0.25
- stem_type: 'v1'
- stochastic_depth_drop_rate: 0.1
- norm_activation:
- activation: 'swish'
- norm_momentum: 0.0
- use_sync_bn: false
- dropout_rate: 0.25
- losses:
- l2_weight_decay: 0.00004
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- aug_type:
- type: 'randaug'
- randaug:
- magnitude: 15
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- train_steps: 109200
- validation_steps: 13
- validation_interval: 312
- steps_per_loop: 312
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- ema:
- average_decay: 0.9999
- optimizer:
- type: 'sgd'
- sgd:
- momentum: 0.9
- learning_rate:
- type: 'cosine'
- cosine:
- initial_learning_rate: 1.6
- decay_steps: 109200
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 1560
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs270_i256.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs270_i256.yaml
deleted file mode 100644
index b7c6a644e2cbb784c18b008d26a2986eacbf98e6..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs270_i256.yaml
+++ /dev/null
@@ -1,64 +0,0 @@
-# ResNet-RS-270 ImageNet classification. 83.6% top-1 accuracy.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [256, 256, 3]
- backbone:
- type: 'resnet'
- resnet:
- model_id: 270
- replace_stem_max_pool: true
- resnetd_shortcut: true
- se_ratio: 0.25
- stem_type: 'v1'
- stochastic_depth_drop_rate: 0.1
- norm_activation:
- activation: 'swish'
- norm_momentum: 0.0
- use_sync_bn: false
- dropout_rate: 0.25
- losses:
- l2_weight_decay: 0.00004
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- aug_type:
- type: 'randaug'
- randaug:
- magnitude: 15
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- train_steps: 109200
- validation_steps: 13
- validation_interval: 312
- steps_per_loop: 312
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- ema:
- average_decay: 0.9999
- optimizer:
- type: 'sgd'
- sgd:
- momentum: 0.9
- learning_rate:
- type: 'cosine'
- cosine:
- initial_learning_rate: 1.6
- decay_steps: 109200
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 1560
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs350_i256.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs350_i256.yaml
deleted file mode 100644
index 3b2d3fe261c21bb789096677e57f2a49d2b75d57..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs350_i256.yaml
+++ /dev/null
@@ -1,64 +0,0 @@
-# ResNet-RS-350 ImageNet classification. 83.7% top-1 accuracy.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [256, 256, 3]
- backbone:
- type: 'resnet'
- resnet:
- model_id: 350
- replace_stem_max_pool: true
- resnetd_shortcut: true
- se_ratio: 0.25
- stem_type: 'v1'
- stochastic_depth_drop_rate: 0.1
- norm_activation:
- activation: 'swish'
- norm_momentum: 0.0
- use_sync_bn: false
- dropout_rate: 0.25
- losses:
- l2_weight_decay: 0.00004
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- aug_type:
- type: 'randaug'
- randaug:
- magnitude: 15
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- train_steps: 109200
- validation_steps: 13
- validation_interval: 312
- steps_per_loop: 312
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- ema:
- average_decay: 0.9999
- optimizer:
- type: 'sgd'
- sgd:
- momentum: 0.9
- learning_rate:
- type: 'cosine'
- cosine:
- initial_learning_rate: 1.6
- decay_steps: 109200
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 1560
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs350_i320.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs350_i320.yaml
deleted file mode 100644
index 36cdba7bb43cd0d41b46e5c87eead2a657afe651..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs350_i320.yaml
+++ /dev/null
@@ -1,64 +0,0 @@
-# ResNet-RS-350 ImageNet classification. 84.2% top-1 accuracy.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [320, 320, 3]
- backbone:
- type: 'resnet'
- resnet:
- model_id: 350
- replace_stem_max_pool: true
- resnetd_shortcut: true
- se_ratio: 0.25
- stem_type: 'v1'
- stochastic_depth_drop_rate: 0.1
- norm_activation:
- activation: 'swish'
- norm_momentum: 0.0
- use_sync_bn: false
- dropout_rate: 0.4
- losses:
- l2_weight_decay: 0.00004
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- aug_type:
- type: 'randaug'
- randaug:
- magnitude: 15
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- train_steps: 109200
- validation_steps: 13
- validation_interval: 312
- steps_per_loop: 312
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- ema:
- average_decay: 0.9999
- optimizer:
- type: 'sgd'
- sgd:
- momentum: 0.9
- learning_rate:
- type: 'cosine'
- cosine:
- initial_learning_rate: 1.6
- decay_steps: 109200
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 1560
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs420_i320.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs420_i320.yaml
deleted file mode 100644
index 9b02b7e006a8239fe86b3d036fbfb484dc0b0995..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs420_i320.yaml
+++ /dev/null
@@ -1,63 +0,0 @@
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [320, 320, 3]
- backbone:
- type: 'resnet'
- resnet:
- model_id: 420
- replace_stem_max_pool: true
- resnetd_shortcut: true
- se_ratio: 0.25
- stem_type: 'v1'
- stochastic_depth_drop_rate: 0.1
- norm_activation:
- activation: 'swish'
- norm_momentum: 0.0
- use_sync_bn: false
- dropout_rate: 0.4
- losses:
- l2_weight_decay: 0.00004
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- aug_type:
- type: 'randaug'
- randaug:
- magnitude: 15
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- train_steps: 109200
- validation_steps: 13
- validation_interval: 312
- steps_per_loop: 312
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- ema:
- average_decay: 0.9999
- optimizer:
- type: 'sgd'
- sgd:
- momentum: 0.9
- learning_rate:
- type: 'cosine'
- cosine:
- initial_learning_rate: 1.6
- decay_steps: 109200
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 1560
diff --git a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs50_i160.yaml b/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs50_i160.yaml
deleted file mode 100644
index a57f41f3908c51fb2a4249e80afe8ef8fff48c88..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/image_classification/imagenet_resnetrs50_i160.yaml
+++ /dev/null
@@ -1,64 +0,0 @@
-# ResNet-RS-50 ImageNet classification. 79.1% top-1 accuracy.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- num_classes: 1001
- input_size: [160, 160, 3]
- backbone:
- type: 'resnet'
- resnet:
- model_id: 50
- replace_stem_max_pool: true
- resnetd_shortcut: true
- se_ratio: 0.25
- stem_type: 'v1'
- stochastic_depth_drop_rate: 0.0
- norm_activation:
- activation: 'swish'
- norm_momentum: 0.0
- use_sync_bn: false
- dropout_rate: 0.25
- losses:
- l2_weight_decay: 0.00004
- one_hot: true
- label_smoothing: 0.1
- train_data:
- input_path: 'imagenet-2012-tfrecord/train*'
- is_training: true
- global_batch_size: 4096
- dtype: 'bfloat16'
- aug_type:
- type: 'randaug'
- randaug:
- magnitude: 10
- validation_data:
- input_path: 'imagenet-2012-tfrecord/valid*'
- is_training: false
- global_batch_size: 4096
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- train_steps: 109200
- validation_steps: 13
- validation_interval: 312
- steps_per_loop: 312
- summary_interval: 312
- checkpoint_interval: 312
- optimizer_config:
- ema:
- average_decay: 0.9999
- optimizer:
- type: 'sgd'
- sgd:
- momentum: 0.9
- learning_rate:
- type: 'cosine'
- cosine:
- initial_learning_rate: 1.6
- decay_steps: 109200
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 1560
diff --git a/official/vision/beta/configs/experiments/maskrcnn/coco_spinenet143_cascadercnn_tpu.yaml b/official/vision/beta/configs/experiments/maskrcnn/coco_spinenet143_cascadercnn_tpu.yaml
deleted file mode 100644
index 1f8b245da76413b5063a347632ef26847c63c36f..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/maskrcnn/coco_spinenet143_cascadercnn_tpu.yaml
+++ /dev/null
@@ -1,58 +0,0 @@
-# --experiment_type=cascadercnn_spinenet_coco
-# Expect to reach: box mAP: 51.9%, mask mAP: 45.0% on COCO
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- init_checkpoint: null
- train_data:
- global_batch_size: 256
- parser:
- aug_rand_hflip: true
- aug_scale_min: 0.1
- aug_scale_max: 2.5
- losses:
- l2_weight_decay: 0.00004
- model:
- anchor:
- anchor_size: 4.0
- num_scales: 3
- min_level: 3
- max_level: 7
- input_size: [1280, 1280, 3]
- backbone:
- spinenet:
- stochastic_depth_drop_rate: 0.2
- model_id: '143'
- type: 'spinenet'
- decoder:
- type: 'identity'
- detection_head:
- cascade_class_ensemble: true
- class_agnostic_bbox_pred: true
- rpn_head:
- num_convs: 2
- num_filters: 256
- roi_sampler:
- cascade_iou_thresholds: [0.7]
- foreground_iou_threshold: 0.6
- norm_activation:
- norm_epsilon: 0.001
- norm_momentum: 0.99
- use_sync_bn: true
- activation: 'swish'
- detection_generator:
- pre_nms_top_k: 1000
-trainer:
- train_steps: 231000
- optimizer_config:
- learning_rate:
- type: 'stepwise'
- stepwise:
- boundaries: [219450, 226380]
- values: [0.32, 0.032, 0.0032]
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 2000
- warmup_learning_rate: 0.0067
diff --git a/official/vision/beta/configs/experiments/maskrcnn/coco_spinenet143_mrcnn_tpu.yaml b/official/vision/beta/configs/experiments/maskrcnn/coco_spinenet143_mrcnn_tpu.yaml
deleted file mode 100644
index 4d5ec8ae4819f337c8ef035558467726e7f8925b..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/maskrcnn/coco_spinenet143_mrcnn_tpu.yaml
+++ /dev/null
@@ -1,47 +0,0 @@
-# Expect to reach: box mAP: 49.3%, mask mAP: 43.4% on COCO
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- init_checkpoint: null
- train_data:
- global_batch_size: 256
- parser:
- aug_rand_hflip: true
- aug_scale_min: 0.1
- aug_scale_max: 2.0
- losses:
- l2_weight_decay: 0.00004
- model:
- anchor:
- anchor_size: 4.0
- num_scales: 3
- min_level: 3
- max_level: 7
- input_size: [1280, 1280, 3]
- backbone:
- spinenet:
- stochastic_depth_drop_rate: 0.2
- model_id: '143'
- type: 'spinenet'
- decoder:
- type: 'identity'
- norm_activation:
- norm_epsilon: 0.001
- norm_momentum: 0.99
- use_sync_bn: true
- detection_generator:
- pre_nms_top_k: 1000
-trainer:
- train_steps: 231000
- optimizer_config:
- learning_rate:
- type: 'stepwise'
- stepwise:
- boundaries: [219450, 226380]
- values: [0.32, 0.032, 0.0032]
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 2000
- warmup_learning_rate: 0.0067
diff --git a/official/vision/beta/configs/experiments/maskrcnn/coco_spinenet49_cascadercnn_tpu.yaml b/official/vision/beta/configs/experiments/maskrcnn/coco_spinenet49_cascadercnn_tpu.yaml
deleted file mode 100644
index a28dd4bb0fcec8264cc13fa949a533e40fa3289b..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/maskrcnn/coco_spinenet49_cascadercnn_tpu.yaml
+++ /dev/null
@@ -1,58 +0,0 @@
-# --experiment_type=cascadercnn_spinenet_coco
-# Expect to reach: box mAP: 46.4%, mask mAP: 40.0% on COCO
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- init_checkpoint: null
- train_data:
- global_batch_size: 256
- parser:
- aug_rand_hflip: true
- aug_scale_min: 0.1
- aug_scale_max: 2.0
- losses:
- l2_weight_decay: 0.00004
- model:
- anchor:
- anchor_size: 3.0
- num_scales: 3
- min_level: 3
- max_level: 7
- input_size: [640, 640, 3]
- backbone:
- spinenet:
- stochastic_depth_drop_rate: 0.2
- model_id: '49'
- type: 'spinenet'
- decoder:
- type: 'identity'
- detection_head:
- cascade_class_ensemble: true
- class_agnostic_bbox_pred: true
- rpn_head:
- num_convs: 2
- num_filters: 256
- roi_sampler:
- cascade_iou_thresholds: [0.7]
- foreground_iou_threshold: 0.6
- norm_activation:
- norm_epsilon: 0.001
- norm_momentum: 0.99
- use_sync_bn: true
- activation: 'swish'
- detection_generator:
- pre_nms_top_k: 1000
-trainer:
- train_steps: 231000
- optimizer_config:
- learning_rate:
- type: 'stepwise'
- stepwise:
- boundaries: [219450, 226380]
- values: [0.32, 0.032, 0.0032]
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 2000
- warmup_learning_rate: 0.0067
diff --git a/official/vision/beta/configs/experiments/maskrcnn/coco_spinenet49_mrcnn_tpu.yaml b/official/vision/beta/configs/experiments/maskrcnn/coco_spinenet49_mrcnn_tpu.yaml
deleted file mode 100644
index 4ac1ae428bf8806f1ebb60a4e07f0163d3b49854..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/maskrcnn/coco_spinenet49_mrcnn_tpu.yaml
+++ /dev/null
@@ -1,47 +0,0 @@
-# Expect to reach: box mAP: 43.2%, mask mAP: 38.3% on COCO
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- init_checkpoint: null
- train_data:
- global_batch_size: 256
- parser:
- aug_rand_hflip: true
- aug_scale_min: 0.1
- aug_scale_max: 2.0
- losses:
- l2_weight_decay: 0.00004
- model:
- anchor:
- anchor_size: 3.0
- num_scales: 3
- min_level: 3
- max_level: 7
- input_size: [640, 640, 3]
- backbone:
- spinenet:
- stochastic_depth_drop_rate: 0.2
- model_id: '49'
- type: 'spinenet'
- decoder:
- type: 'identity'
- norm_activation:
- norm_epsilon: 0.001
- norm_momentum: 0.99
- use_sync_bn: true
- detection_generator:
- pre_nms_top_k: 1000
-trainer:
- train_steps: 231000
- optimizer_config:
- learning_rate:
- type: 'stepwise'
- stepwise:
- boundaries: [219450, 226380]
- values: [0.32, 0.032, 0.0032]
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 2000
- warmup_learning_rate: 0.0067
diff --git a/official/vision/beta/configs/experiments/maskrcnn/coco_spinenet96_cascadercnn_tpu.yaml b/official/vision/beta/configs/experiments/maskrcnn/coco_spinenet96_cascadercnn_tpu.yaml
deleted file mode 100644
index b8dd2fb9d72cbb6a91000a6ba63b26e97f9d7dee..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/maskrcnn/coco_spinenet96_cascadercnn_tpu.yaml
+++ /dev/null
@@ -1,58 +0,0 @@
-# --experiment_type=cascadercnn_spinenet_coco
-# Expect to reach: box mAP: 51.9%, mask mAP: 45.0% on COCO
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- init_checkpoint: null
- train_data:
- global_batch_size: 256
- parser:
- aug_rand_hflip: true
- aug_scale_min: 0.1
- aug_scale_max: 2.5
- losses:
- l2_weight_decay: 0.00004
- model:
- anchor:
- anchor_size: 4.0
- num_scales: 3
- min_level: 3
- max_level: 7
- input_size: [1024, 1024, 3]
- backbone:
- spinenet:
- stochastic_depth_drop_rate: 0.2
- model_id: '96'
- type: 'spinenet'
- decoder:
- type: 'identity'
- detection_head:
- cascade_class_ensemble: true
- class_agnostic_bbox_pred: true
- rpn_head:
- num_convs: 2
- num_filters: 256
- roi_sampler:
- cascade_iou_thresholds: [0.7]
- foreground_iou_threshold: 0.6
- norm_activation:
- norm_epsilon: 0.001
- norm_momentum: 0.99
- use_sync_bn: true
- activation: 'swish'
- detection_generator:
- pre_nms_top_k: 1000
-trainer:
- train_steps: 231000
- optimizer_config:
- learning_rate:
- type: 'stepwise'
- stepwise:
- boundaries: [219450, 226380]
- values: [0.32, 0.032, 0.0032]
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 2000
- warmup_learning_rate: 0.0067
diff --git a/official/vision/beta/configs/experiments/maskrcnn/coco_spinenet96_mrcnn_tpu.yaml b/official/vision/beta/configs/experiments/maskrcnn/coco_spinenet96_mrcnn_tpu.yaml
deleted file mode 100644
index 9609b7eee34d0c0dadba209c7dda173bd7a32562..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/maskrcnn/coco_spinenet96_mrcnn_tpu.yaml
+++ /dev/null
@@ -1,47 +0,0 @@
-# Expect to reach: box mAP: 48.1%, mask mAP: 42.4% on COCO
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- init_checkpoint: null
- train_data:
- global_batch_size: 256
- parser:
- aug_rand_hflip: true
- aug_scale_min: 0.1
- aug_scale_max: 2.0
- losses:
- l2_weight_decay: 0.00004
- model:
- anchor:
- anchor_size: 3.0
- num_scales: 3
- min_level: 3
- max_level: 7
- input_size: [1024, 1024, 3]
- backbone:
- spinenet:
- stochastic_depth_drop_rate: 0.2
- model_id: '96'
- type: 'spinenet'
- decoder:
- type: 'identity'
- norm_activation:
- norm_epsilon: 0.001
- norm_momentum: 0.99
- use_sync_bn: true
- detection_generator:
- pre_nms_top_k: 1000
-trainer:
- train_steps: 231000
- optimizer_config:
- learning_rate:
- type: 'stepwise'
- stepwise:
- boundaries: [219450, 226380]
- values: [0.32, 0.032, 0.0032]
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 2000
- warmup_learning_rate: 0.0067
diff --git a/official/vision/beta/configs/experiments/maskrcnn/r50fpn_640_coco_scratch_tpu4x4.yaml b/official/vision/beta/configs/experiments/maskrcnn/r50fpn_640_coco_scratch_tpu4x4.yaml
deleted file mode 100644
index 218f045105860a76069128b410aa92aa5abc4053..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/maskrcnn/r50fpn_640_coco_scratch_tpu4x4.yaml
+++ /dev/null
@@ -1,36 +0,0 @@
-# Expect to reach: box mAP: 42.3%, mask mAP: 37.6% on COCO
-task:
- init_checkpoint: null
- train_data:
- global_batch_size: 256
- parser:
- aug_rand_hflip: true
- aug_scale_min: 0.5
- aug_scale_max: 2.0
- losses:
- l2_weight_decay: 0.00008
- model:
- anchor:
- anchor_size: 3.0
- min_level: 3
- max_level: 7
- input_size: [640, 640, 3]
- norm_activation:
- norm_epsilon: 0.001
- norm_momentum: 0.99
- use_sync_bn: true
- detection_generator:
- pre_nms_top_k: 1000
-trainer:
- train_steps: 162050
- optimizer_config:
- learning_rate:
- type: 'stepwise'
- stepwise:
- boundaries: [148160, 157420]
- values: [0.32, 0.032, 0.0032]
- warmup:
- type: 'linear'
- linear:
- warmup_steps: 2000
- warmup_learning_rate: 0.0067
diff --git a/official/vision/beta/configs/experiments/retinanet/coco_mobiledetcpu_tpu.yaml b/official/vision/beta/configs/experiments/retinanet/coco_mobiledetcpu_tpu.yaml
deleted file mode 100644
index 80608cc1f715542659b480f8d5dee11c2921d6d9..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/retinanet/coco_mobiledetcpu_tpu.yaml
+++ /dev/null
@@ -1,62 +0,0 @@
-# --experiment_type=retinanet_mobile_coco
-# COCO AP 27.0%
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- losses:
- l2_weight_decay: 3.0e-05
- model:
- anchor:
- anchor_size: 3
- aspect_ratios: [0.5, 1.0, 2.0]
- num_scales: 3
- backbone:
- mobilenet:
- model_id: 'MobileDetCPU'
- filter_size_scale: 1.0
- type: 'mobiledet'
- decoder:
- type: 'fpn'
- fpn:
- num_filters: 128
- use_separable_conv: true
- head:
- num_convs: 4
- num_filters: 128
- use_separable_conv: true
- input_size: [320 320, 3]
- max_level: 6
- min_level: 3
- norm_activation:
- activation: 'relu6'
- norm_epsilon: 0.001
- norm_momentum: 0.99
- use_sync_bn: true
- train_data:
- dtype: 'bfloat16'
- global_batch_size: 256
- is_training: true
- parser:
- aug_rand_hflip: true
- aug_scale_max: 2.0
- aug_scale_min: 0.5
- validation_data:
- dtype: 'bfloat16'
- global_batch_size: 8
- is_training: false
-trainer:
- optimizer_config:
- learning_rate:
- stepwise:
- boundaries: [263340, 272580]
- values: [0.32, 0.032, 0.0032]
- type: 'stepwise'
- warmup:
- linear:
- warmup_learning_rate: 0.0067
- warmup_steps: 2000
- steps_per_loop: 462
- train_steps: 277200
- validation_interval: 462
- validation_steps: 625
diff --git a/official/vision/beta/configs/experiments/retinanet/coco_mobilenetv2_tpu.yaml b/official/vision/beta/configs/experiments/retinanet/coco_mobilenetv2_tpu.yaml
deleted file mode 100644
index 9e27bfe8c7201e2490760bbd2d2eeabc5092952a..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/retinanet/coco_mobilenetv2_tpu.yaml
+++ /dev/null
@@ -1,62 +0,0 @@
-# --experiment_type=retinanet_mobile_coco
-# COCO AP 23.5%
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- losses:
- l2_weight_decay: 3.0e-05
- model:
- anchor:
- anchor_size: 3
- aspect_ratios: [0.5, 1.0, 2.0]
- num_scales: 3
- backbone:
- mobilenet:
- model_id: 'MobileNetV2'
- filter_size_scale: 1.0
- type: 'mobilenet'
- decoder:
- type: 'fpn'
- fpn:
- num_filters: 128
- use_separable_conv: true
- head:
- num_convs: 4
- num_filters: 128
- use_separable_conv: true
- input_size: [256, 256, 3]
- max_level: 7
- min_level: 3
- norm_activation:
- activation: 'relu6'
- norm_epsilon: 0.001
- norm_momentum: 0.99
- use_sync_bn: true
- train_data:
- dtype: 'bfloat16'
- global_batch_size: 256
- is_training: true
- parser:
- aug_rand_hflip: true
- aug_scale_max: 2.0
- aug_scale_min: 0.5
- validation_data:
- dtype: 'bfloat16'
- global_batch_size: 8
- is_training: false
-trainer:
- optimizer_config:
- learning_rate:
- stepwise:
- boundaries: [263340, 272580]
- values: [0.32, 0.032, 0.0032]
- type: 'stepwise'
- warmup:
- linear:
- warmup_learning_rate: 0.0067
- warmup_steps: 2000
- steps_per_loop: 462
- train_steps: 277200
- validation_interval: 462
- validation_steps: 625
diff --git a/official/vision/beta/configs/experiments/retinanet/coco_spinenet143_tpu.yaml b/official/vision/beta/configs/experiments/retinanet/coco_spinenet143_tpu.yaml
deleted file mode 100644
index 438fe031a8bdb9e1daaadcc6b977aa1d8319586f..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/retinanet/coco_spinenet143_tpu.yaml
+++ /dev/null
@@ -1,58 +0,0 @@
-# SpineNet-143 COCO detection with protocal C config. Expecting 50.0% AP.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- losses:
- l2_weight_decay: 4.0e-05
- model:
- anchor:
- anchor_size: 4
- aspect_ratios: [0.5, 1.0, 2.0]
- num_scales: 3
- backbone:
- spinenet:
- stochastic_depth_drop_rate: 0.2
- model_id: '143'
- type: 'spinenet'
- decoder:
- type: 'identity'
- head:
- num_convs: 4
- num_filters: 256
- input_size: [1280, 1280, 3]
- max_level: 7
- min_level: 3
- norm_activation:
- activation: 'swish'
- norm_epsilon: 0.001
- norm_momentum: 0.99
- use_sync_bn: true
- train_data:
- dtype: 'bfloat16'
- global_batch_size: 256
- is_training: true
- parser:
- aug_rand_hflip: true
- aug_scale_max: 2.0
- aug_scale_min: 0.1
- validation_data:
- dtype: 'bfloat16'
- global_batch_size: 8
- is_training: false
-trainer:
- checkpoint_interval: 462
- optimizer_config:
- learning_rate:
- stepwise:
- boundaries: [219450, 226380]
- values: [0.32, 0.032, 0.0032]
- type: 'stepwise'
- warmup:
- linear:
- warmup_learning_rate: 0.0067
- warmup_steps: 2000
- steps_per_loop: 462
- train_steps: 231000
- validation_interval: 462
- validation_steps: 625
diff --git a/official/vision/beta/configs/experiments/retinanet/coco_spinenet190_tpu.yaml b/official/vision/beta/configs/experiments/retinanet/coco_spinenet190_tpu.yaml
deleted file mode 100644
index bc0ea1f94ec47baf80bde094e193ad8d1349e551..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/retinanet/coco_spinenet190_tpu.yaml
+++ /dev/null
@@ -1,57 +0,0 @@
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- losses:
- l2_weight_decay: 4.0e-05
- model:
- anchor:
- anchor_size: 4
- aspect_ratios: [0.5, 1.0, 2.0]
- num_scales: 3
- backbone:
- spinenet:
- stochastic_depth_drop_rate: 0.2
- model_id: '190'
- type: 'spinenet'
- decoder:
- type: 'identity'
- head:
- num_convs: 7
- num_filters: 512
- input_size: [1280, 1280, 3]
- max_level: 7
- min_level: 3
- norm_activation:
- activation: 'swish'
- norm_epsilon: 0.001
- norm_momentum: 0.99
- use_sync_bn: true
- train_data:
- dtype: 'bfloat16'
- global_batch_size: 256
- is_training: true
- parser:
- aug_rand_hflip: true
- aug_scale_max: 2.0
- aug_scale_min: 0.1
- validation_data:
- dtype: 'bfloat16'
- global_batch_size: 8
- is_training: false
-trainer:
- checkpoint_interval: 462
- optimizer_config:
- learning_rate:
- stepwise:
- boundaries: [219450, 226380]
- values: [0.32, 0.032, 0.0032]
- type: 'stepwise'
- warmup:
- linear:
- warmup_learning_rate: 0.0067
- warmup_steps: 2000
- steps_per_loop: 462
- train_steps: 231000
- validation_interval: 462
- validation_steps: 625
diff --git a/official/vision/beta/configs/experiments/retinanet/coco_spinenet49_mobile_tpu.yaml b/official/vision/beta/configs/experiments/retinanet/coco_spinenet49_mobile_tpu.yaml
deleted file mode 100644
index e1e14b321f0d118eec89aed08578ee88bdae7ba2..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/retinanet/coco_spinenet49_mobile_tpu.yaml
+++ /dev/null
@@ -1,60 +0,0 @@
-# --experiment_type=retinanet_mobile_coco
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- losses:
- l2_weight_decay: 3.0e-05
- model:
- anchor:
- anchor_size: 3
- aspect_ratios: [0.5, 1.0, 2.0]
- num_scales: 3
- backbone:
- spinenet_mobile:
- stochastic_depth_drop_rate: 0.2
- model_id: '49'
- se_ratio: 0.2
- type: 'spinenet_mobile'
- decoder:
- type: 'identity'
- head:
- num_convs: 4
- num_filters: 48
- use_separable_conv: true
- input_size: [384, 384, 3]
- max_level: 7
- min_level: 3
- norm_activation:
- activation: 'swish'
- norm_epsilon: 0.001
- norm_momentum: 0.99
- use_sync_bn: true
- train_data:
- dtype: 'bfloat16'
- global_batch_size: 256
- is_training: true
- parser:
- aug_rand_hflip: true
- aug_scale_max: 2.0
- aug_scale_min: 0.5
- validation_data:
- dtype: 'bfloat16'
- global_batch_size: 8
- is_training: false
-trainer:
- checkpoint_interval: 462
- optimizer_config:
- learning_rate:
- stepwise:
- boundaries: [263340, 272580]
- values: [0.32, 0.032, 0.0032]
- type: 'stepwise'
- warmup:
- linear:
- warmup_learning_rate: 0.0067
- warmup_steps: 2000
- steps_per_loop: 462
- train_steps: 277200
- validation_interval: 462
- validation_steps: 625
diff --git a/official/vision/beta/configs/experiments/retinanet/coco_spinenet49_tpu.yaml b/official/vision/beta/configs/experiments/retinanet/coco_spinenet49_tpu.yaml
deleted file mode 100644
index 725e1fc9b84fa4516d5ef431f2dd335eb8d65bc1..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/retinanet/coco_spinenet49_tpu.yaml
+++ /dev/null
@@ -1,58 +0,0 @@
-# SpineNet-49 COCO detection with protocal C config. Expecting 44.2% AP.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- losses:
- l2_weight_decay: 4.0e-05
- model:
- anchor:
- anchor_size: 3
- aspect_ratios: [0.5, 1.0, 2.0]
- num_scales: 3
- backbone:
- spinenet:
- stochastic_depth_drop_rate: 0.2
- model_id: '49'
- type: 'spinenet'
- decoder:
- type: 'identity'
- head:
- num_convs: 4
- num_filters: 256
- input_size: [640, 640, 3]
- max_level: 7
- min_level: 3
- norm_activation:
- activation: 'swish'
- norm_epsilon: 0.001
- norm_momentum: 0.99
- use_sync_bn: true
- train_data:
- dtype: 'bfloat16'
- global_batch_size: 256
- is_training: true
- parser:
- aug_rand_hflip: true
- aug_scale_max: 2.0
- aug_scale_min: 0.1
- validation_data:
- dtype: 'bfloat16'
- global_batch_size: 8
- is_training: false
-trainer:
- checkpoint_interval: 462
- optimizer_config:
- learning_rate:
- stepwise:
- boundaries: [219450, 226380]
- values: [0.32, 0.032, 0.0032]
- type: 'stepwise'
- warmup:
- linear:
- warmup_learning_rate: 0.0067
- warmup_steps: 2000
- steps_per_loop: 462
- train_steps: 231000
- validation_interval: 462
- validation_steps: 625
diff --git a/official/vision/beta/configs/experiments/retinanet/coco_spinenet49s_mobile_tpu.yaml b/official/vision/beta/configs/experiments/retinanet/coco_spinenet49s_mobile_tpu.yaml
deleted file mode 100644
index 9f854ccf44c53d385b81ce69fa69fc94d7d92bd5..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/retinanet/coco_spinenet49s_mobile_tpu.yaml
+++ /dev/null
@@ -1,60 +0,0 @@
-# --experiment_type=retinanet_mobile_coco
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- losses:
- l2_weight_decay: 3.0e-05
- model:
- anchor:
- anchor_size: 3
- aspect_ratios: [0.5, 1.0, 2.0]
- num_scales: 3
- backbone:
- spinenet_mobile:
- stochastic_depth_drop_rate: 0.2
- model_id: '49S'
- se_ratio: 0.2
- type: 'spinenet_mobile'
- decoder:
- type: 'identity'
- head:
- num_convs: 4
- num_filters: 40
- use_separable_conv: true
- input_size: [384, 384, 3]
- max_level: 7
- min_level: 3
- norm_activation:
- activation: 'swish'
- norm_epsilon: 0.001
- norm_momentum: 0.99
- use_sync_bn: true
- train_data:
- dtype: 'bfloat16'
- global_batch_size: 256
- is_training: true
- parser:
- aug_rand_hflip: true
- aug_scale_max: 2.0
- aug_scale_min: 0.5
- validation_data:
- dtype: 'bfloat16'
- global_batch_size: 8
- is_training: false
-trainer:
- checkpoint_interval: 462
- optimizer_config:
- learning_rate:
- stepwise:
- boundaries: [263340, 272580]
- values: [0.32, 0.032, 0.0032]
- type: 'stepwise'
- warmup:
- linear:
- warmup_learning_rate: 0.0067
- warmup_steps: 2000
- steps_per_loop: 462
- train_steps: 277200
- validation_interval: 462
- validation_steps: 625
diff --git a/official/vision/beta/configs/experiments/retinanet/coco_spinenet49xs_mobile_tpu.yaml b/official/vision/beta/configs/experiments/retinanet/coco_spinenet49xs_mobile_tpu.yaml
deleted file mode 100644
index 926bd62097ae885374bfceb40089de1646d6fe3d..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/retinanet/coco_spinenet49xs_mobile_tpu.yaml
+++ /dev/null
@@ -1,60 +0,0 @@
-# --experiment_type=retinanet_mobile_coco
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- losses:
- l2_weight_decay: 3.0e-05
- model:
- anchor:
- anchor_size: 3
- aspect_ratios: [0.5, 1.0, 2.0]
- num_scales: 3
- backbone:
- spinenet_mobile:
- stochastic_depth_drop_rate: 0.2
- model_id: '49XS'
- se_ratio: 0.2
- type: 'spinenet_mobile'
- decoder:
- type: 'identity'
- head:
- num_convs: 4
- num_filters: 24
- use_separable_conv: true
- input_size: [256, 256, 3]
- max_level: 7
- min_level: 3
- norm_activation:
- activation: 'swish'
- norm_epsilon: 0.001
- norm_momentum: 0.99
- use_sync_bn: true
- train_data:
- dtype: 'bfloat16'
- global_batch_size: 256
- is_training: true
- parser:
- aug_rand_hflip: true
- aug_scale_max: 2.0
- aug_scale_min: 0.5
- validation_data:
- dtype: 'bfloat16'
- global_batch_size: 8
- is_training: false
-trainer:
- checkpoint_interval: 462
- optimizer_config:
- learning_rate:
- stepwise:
- boundaries: [263340, 272580]
- values: [0.32, 0.032, 0.0032]
- type: 'stepwise'
- warmup:
- linear:
- warmup_learning_rate: 0.0067
- warmup_steps: 2000
- steps_per_loop: 462
- train_steps: 277200
- validation_interval: 462
- validation_steps: 625
diff --git a/official/vision/beta/configs/experiments/retinanet/coco_spinenet96_tpu.yaml b/official/vision/beta/configs/experiments/retinanet/coco_spinenet96_tpu.yaml
deleted file mode 100644
index c75d667753fa859cfd585235f70c136ce349a488..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/retinanet/coco_spinenet96_tpu.yaml
+++ /dev/null
@@ -1,58 +0,0 @@
-# SpineNet-96 COCO detection with protocol C config. Expecting 48.5% AP.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- losses:
- l2_weight_decay: 4.0e-05
- model:
- anchor:
- anchor_size: 3
- aspect_ratios: [0.5, 1.0, 2.0]
- num_scales: 3
- backbone:
- spinenet:
- stochastic_depth_drop_rate: 0.2
- model_id: '96'
- type: 'spinenet'
- decoder:
- type: 'identity'
- head:
- num_convs: 4
- num_filters: 256
- input_size: [1024, 1024, 3]
- max_level: 7
- min_level: 3
- norm_activation:
- activation: 'swish'
- norm_epsilon: 0.001
- norm_momentum: 0.99
- use_sync_bn: true
- train_data:
- dtype: 'bfloat16'
- global_batch_size: 256
- is_training: true
- parser:
- aug_rand_hflip: true
- aug_scale_max: 2.0
- aug_scale_min: 0.1
- validation_data:
- dtype: 'bfloat16'
- global_batch_size: 8
- is_training: false
-trainer:
- checkpoint_interval: 462
- optimizer_config:
- learning_rate:
- stepwise:
- boundaries: [219450, 226380]
- values: [0.32, 0.032, 0.0032]
- type: 'stepwise'
- warmup:
- linear:
- warmup_learning_rate: 0.0067
- warmup_steps: 2000
- steps_per_loop: 462
- train_steps: 231000
- validation_interval: 462
- validation_steps: 625
diff --git a/official/vision/beta/configs/experiments/retinanet/resnet50fpn_coco_tfds_tpu.yaml b/official/vision/beta/configs/experiments/retinanet/resnet50fpn_coco_tfds_tpu.yaml
deleted file mode 100644
index 0f9a30a34438042eb164631284ff0efe5279f8c3..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/retinanet/resnet50fpn_coco_tfds_tpu.yaml
+++ /dev/null
@@ -1,34 +0,0 @@
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- annotation_file: '' # Can't use annotation file when tfds is used.
- losses:
- l2_weight_decay: 0.0001
- model:
- num_classes: 91
- max_level: 7
- min_level: 3
- input_size: [640, 640, 3]
- norm_activation:
- activation: relu
- norm_epsilon: 0.001
- norm_momentum: 0.99
- use_sync_bn: true
- train_data:
- tfds_name: 'coco/2017'
- tfds_split: 'train'
- drop_remainder: true
- dtype: bfloat16
- global_batch_size: 256
- input_path: ''
- is_training: true
- shuffle_buffer_size: 1000
- validation_data:
- tfds_name: 'coco/2017'
- tfds_split: 'validation'
- drop_remainder: true
- dtype: bfloat16
- global_batch_size: 8
- input_path: ''
- is_training: false
diff --git a/official/vision/beta/configs/experiments/retinanet/resnet50fpn_coco_tpu4x4_benchmark.yaml b/official/vision/beta/configs/experiments/retinanet/resnet50fpn_coco_tpu4x4_benchmark.yaml
deleted file mode 100644
index 46b1f3cad7c298984ab1b398c1bf4669415b6890..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/retinanet/resnet50fpn_coco_tpu4x4_benchmark.yaml
+++ /dev/null
@@ -1,7 +0,0 @@
-# Benchmarks runs on same instnace, change eval batch size to fit on 4x4 tpu
-task:
- validation_data:
- global_batch_size: 32
-trainer:
- validation_interval: 1560
- validation_steps: 156
diff --git a/official/vision/beta/configs/experiments/semantic_segmentation/deeplabv3plus_resnet101_cityscapes_tfds_tpu.yaml b/official/vision/beta/configs/experiments/semantic_segmentation/deeplabv3plus_resnet101_cityscapes_tfds_tpu.yaml
deleted file mode 100644
index 4ffc7689d2f2b3741e065664cb63d265544e7d2d..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/semantic_segmentation/deeplabv3plus_resnet101_cityscapes_tfds_tpu.yaml
+++ /dev/null
@@ -1,78 +0,0 @@
-# Use your own cityscapes preprocessed dataset. 79% meanIoU.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'float32'
-task:
- model:
- num_classes: 19
- input_size: [null, null, 3]
- backbone:
- type: 'dilated_resnet'
- dilated_resnet:
- model_id: 101
- output_stride: 16
- stem_type: 'v1'
- se_ratio: 0.25
- stochastic_depth_drop_rate: 0.2
- multigrid: [1, 2, 4]
- last_stage_repeats: 1
- decoder:
- aspp:
- pool_kernel_size: [512, 1024]
- head:
- feature_fusion: 'deeplabv3plus'
- low_level: 2
- low_level_num_filters: 48
- norm_activation:
- activation: 'swish'
- norm_epsilon: 0.001
- norm_momentum: 0.99
- use_sync_bn: true
- losses:
- top_k_percent_pixels: 1.0 # only backpropagate loss for the topk 100% pixels.
- train_data:
- output_size: [1024, 2048]
- crop_size: [512, 1024]
- input_path: ''
- tfds_name: 'cityscapes/semantic_segmentation'
- tfds_split: 'train'
- is_training: true
- global_batch_size: 16
- dtype: 'float32'
- aug_rand_hflip: true
- aug_scale_max: 2.0
- aug_scale_min: 0.5
- validation_data:
- output_size: [1024, 2048]
- input_path: ''
- tfds_name: 'cityscapes/semantic_segmentation'
- tfds_split: 'validation'
- is_training: false
- global_batch_size: 16
- dtype: 'float32'
- drop_remainder: false
- resize_eval_groundtruth: true
-trainer:
- optimizer_config:
- learning_rate:
- polynomial:
- decay_steps: 90000
- initial_learning_rate: 0.01
- power: 0.9
- type: polynomial
- optimizer:
- sgd:
- momentum: 0.9
- type: sgd
- warmup:
- linear:
- name: linear
- warmup_learning_rate: 0
- warmup_steps: 925
- type: linear
- steps_per_loop: 185
- summary_interval: 185
- train_steps: 90000
- validation_interval: 185
- validation_steps: 31
- checkpoint_interval: 185
diff --git a/official/vision/beta/configs/experiments/video_classification/k400_3d-resnet50_tpu.yaml b/official/vision/beta/configs/experiments/video_classification/k400_3d-resnet50_tpu.yaml
deleted file mode 100644
index d9158c2bd179b7d7284f063efaf2e97a26c50edf..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/video_classification/k400_3d-resnet50_tpu.yaml
+++ /dev/null
@@ -1,88 +0,0 @@
-# 3D ResNet-50 video classification on Kinetics-400.
-#
-# --experiment_type=video_classification_kinetics400
-# Expected accuracy: 77.0% top-1, 93.0% top-5.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- dropout_rate: 0.5
- norm_activation:
- use_sync_bn: false
- backbone:
- resnet_3d:
- block_specs: !!python/tuple
- - temporal_kernel_sizes: !!python/tuple
- - 1
- - 1
- - 1
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 1
- - 1
- - 1
- - 1
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 3
- - 3
- - 3
- - 3
- - 3
- - 3
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 3
- - 3
- - 3
- temporal_strides: 1
- use_self_gating: false
- model_id: 50
- stem_conv_temporal_kernel_size: 5
- stem_conv_temporal_stride: 2
- stem_pool_temporal_stride: 1
- train_data:
- name: kinetics400
- feature_shape: !!python/tuple
- - 32
- - 224
- - 224
- - 3
- temporal_stride: 2
- global_batch_size: 1024
- dtype: 'bfloat16'
- shuffle_buffer_size: 1024
- aug_max_area_ratio: 1.0
- aug_max_aspect_ratio: 2.0
- aug_min_area_ratio: 0.08
- aug_min_aspect_ratio: 0.5
- validation_data:
- name: kinetics400
- feature_shape: !!python/tuple
- - 32
- - 256
- - 256
- - 3
- temporal_stride: 2
- num_test_clips: 10
- num_test_crops: 3
- global_batch_size: 64
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- optimizer_config:
- learning_rate:
- cosine:
- initial_learning_rate: 0.8
- decay_steps: 42104
- warmup:
- linear:
- warmup_steps: 1053
- train_steps: 42104
- steps_per_loop: 500
- summary_interval: 500
- validation_interval: 500
diff --git a/official/vision/beta/configs/experiments/video_classification/k400_resnet3drs_50_tpu.yaml b/official/vision/beta/configs/experiments/video_classification/k400_resnet3drs_50_tpu.yaml
deleted file mode 100644
index 83875d1273a6f96df05a10fa46e101bf32498c73..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/video_classification/k400_resnet3drs_50_tpu.yaml
+++ /dev/null
@@ -1,99 +0,0 @@
-# 3D ResNet-RS-50 video classification on Kinetics-400.
-#
-# --experiment_type=video_classification_kinetics400
-# Expected accuracy: 78.2% top-1 accuracy.
-runtime:
- mixed_precision_dtype: bfloat16
-task:
- losses:
- l2_weight_decay: 0.00004
- label_smoothing: 0.1
- one_hot: true
- model:
- aggregate_endpoints: false
- backbone:
- resnet_3d_rs:
- model_id: 50
- stem_type: 'v1'
- stem_conv_temporal_kernel_size: 5
- stem_conv_temporal_stride: 2
- stem_pool_temporal_stride: 1
- stochastic_depth_drop_rate: 0.1
- se_ratio: 0.25
- type: resnet_3d_rs
- dropout_rate: 0.5
- model_type: video_classification
- norm_activation:
- activation: relu
- norm_epsilon: 1.0e-05
- norm_momentum: 0.0
- use_sync_bn: false
- train_data:
- data_format: channels_last
- drop_remainder: true
- dtype: bfloat16
- feature_shape: !!python/tuple
- - 32
- - 224
- - 224
- - 3
- file_type: sstable
- global_batch_size: 1024
- is_training: true
- min_image_size: 256
- name: kinetics400
- num_channels: 3
- num_classes: 400
- num_examples: 215570
- num_test_clips: 1
- num_test_crops: 1
- one_hot: true
- temporal_stride: 2
- aug_max_area_ratio: 1.0
- aug_max_aspect_ratio: 2.0
- aug_min_area_ratio: 0.08
- aug_min_aspect_ratio: 0.5
- validation_data:
- data_format: channels_last
- drop_remainder: false
- dtype: bfloat16
- feature_shape: !!python/tuple
- - 32
- - 256
- - 256
- - 3
- file_type: sstable
- global_batch_size: 64
- is_training: false
- min_image_size: 256
- name: kinetics400
- num_channels: 3
- num_classes: 400
- num_examples: 17706
- num_test_clips: 10
- num_test_crops: 3
- one_hot: true
- temporal_stride: 2
-trainer:
- checkpoint_interval: 210
- max_to_keep: 3
- optimizer_config:
- ema:
- average_decay: 0.9999
- trainable_weights_only: false
- learning_rate:
- cosine:
- decay_steps: 73682
- initial_learning_rate: 0.8
- name: CosineDecay
- type: cosine
- warmup:
- linear:
- name: linear
- warmup_learning_rate: 0
- warmup_steps: 1050
- type: linear
- train_steps: 73682
- steps_per_loop: 500
- summary_interval: 500
- validation_interval: 500
diff --git a/official/vision/beta/configs/experiments/video_classification/k400_slowonly16x4_tpu.yaml b/official/vision/beta/configs/experiments/video_classification/k400_slowonly16x4_tpu.yaml
deleted file mode 100644
index 8e6793a374e02743395ba86705d971f3e1204dc2..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/video_classification/k400_slowonly16x4_tpu.yaml
+++ /dev/null
@@ -1,88 +0,0 @@
-# SlowOnly 16x4 video classification on Kinetics-400.
-#
-# --experiment_type=video_classification_kinetics400
-# Expected accuracy: 75.6% top-1, 92.1% top-5.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- dropout_rate: 0.5
- norm_activation:
- use_sync_bn: false
- backbone:
- resnet_3d:
- block_specs: !!python/tuple
- - temporal_kernel_sizes: !!python/tuple
- - 1
- - 1
- - 1
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 1
- - 1
- - 1
- - 1
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 3
- - 3
- - 3
- - 3
- - 3
- - 3
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 3
- - 3
- - 3
- temporal_strides: 1
- use_self_gating: false
- model_id: 50
- stem_conv_temporal_kernel_size: 1
- stem_conv_temporal_stride: 1
- stem_pool_temporal_stride: 1
- train_data:
- name: kinetics400
- feature_shape: !!python/tuple
- - 16
- - 224
- - 224
- - 3
- temporal_stride: 4
- global_batch_size: 1024
- dtype: 'bfloat16'
- shuffle_buffer_size: 1024
- aug_max_area_ratio: 1.0
- aug_max_aspect_ratio: 2.0
- aug_min_area_ratio: 0.08
- aug_min_aspect_ratio: 0.5
- validation_data:
- name: kinetics400
- feature_shape: !!python/tuple
- - 16
- - 256
- - 256
- - 3
- temporal_stride: 4
- num_test_clips: 10
- num_test_crops: 3
- global_batch_size: 64
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- optimizer_config:
- learning_rate:
- cosine:
- initial_learning_rate: 0.8
- decay_steps: 42104
- warmup:
- linear:
- warmup_steps: 1053
- train_steps: 42104
- steps_per_loop: 500
- summary_interval: 500
- validation_interval: 500
diff --git a/official/vision/beta/configs/experiments/video_classification/k400_slowonly8x8_tpu.yaml b/official/vision/beta/configs/experiments/video_classification/k400_slowonly8x8_tpu.yaml
deleted file mode 100644
index c0bcd881ef37d55c4275cf2d5bd32eb09a6772a3..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/video_classification/k400_slowonly8x8_tpu.yaml
+++ /dev/null
@@ -1,88 +0,0 @@
-# SlowOnly 8x8 video classification on Kinetics-400.
-#
-# --experiment_type=video_classification_kinetics400
-# Expected accuracy: 74.1% top-1, 91.4% top-5.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- dropout_rate: 0.5
- norm_activation:
- use_sync_bn: false
- backbone:
- resnet_3d:
- block_specs: !!python/tuple
- - temporal_kernel_sizes: !!python/tuple
- - 1
- - 1
- - 1
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 1
- - 1
- - 1
- - 1
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 3
- - 3
- - 3
- - 3
- - 3
- - 3
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 3
- - 3
- - 3
- temporal_strides: 1
- use_self_gating: false
- model_id: 50
- stem_conv_temporal_kernel_size: 1
- stem_conv_temporal_stride: 1
- stem_pool_temporal_stride: 1
- train_data:
- name: kinetics400
- feature_shape: !!python/tuple
- - 8
- - 224
- - 224
- - 3
- temporal_stride: 8
- global_batch_size: 1024
- dtype: 'bfloat16'
- shuffle_buffer_size: 1024
- aug_max_area_ratio: 1.0
- aug_max_aspect_ratio: 2.0
- aug_min_area_ratio: 0.08
- aug_min_aspect_ratio: 0.5
- validation_data:
- name: kinetics400
- feature_shape: !!python/tuple
- - 8
- - 256
- - 256
- - 3
- temporal_stride: 8
- num_test_clips: 10
- num_test_crops: 3
- global_batch_size: 64
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- optimizer_config:
- learning_rate:
- cosine:
- initial_learning_rate: 0.8
- decay_steps: 42104
- warmup:
- linear:
- warmup_steps: 1053
- train_steps: 42104
- steps_per_loop: 500
- summary_interval: 500
- validation_interval: 500
diff --git a/official/vision/beta/configs/experiments/video_classification/k600_3d-resnet50_tpu.yaml b/official/vision/beta/configs/experiments/video_classification/k600_3d-resnet50_tpu.yaml
deleted file mode 100644
index ceb38608d6da92b674ce8864f41c646f63ea4f1e..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/video_classification/k600_3d-resnet50_tpu.yaml
+++ /dev/null
@@ -1,88 +0,0 @@
-# 3D ResNet-50 video classification on Kinetics-600.
-#
-# --experiment_type=video_classification_kinetics600
-# Expected accuracy: 79.5% top-1, 94.8% top-5.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- dropout_rate: 0.5
- norm_activation:
- use_sync_bn: false
- backbone:
- resnet_3d:
- block_specs: !!python/tuple
- - temporal_kernel_sizes: !!python/tuple
- - 1
- - 1
- - 1
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 1
- - 1
- - 1
- - 1
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 3
- - 3
- - 3
- - 3
- - 3
- - 3
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 3
- - 3
- - 3
- temporal_strides: 1
- use_self_gating: false
- model_id: 50
- stem_conv_temporal_kernel_size: 5
- stem_conv_temporal_stride: 2
- stem_pool_temporal_stride: 1
- train_data:
- name: kinetics600
- feature_shape: !!python/tuple
- - 32
- - 224
- - 224
- - 3
- temporal_stride: 2
- global_batch_size: 1024
- dtype: 'bfloat16'
- shuffle_buffer_size: 1024
- aug_max_area_ratio: 1.0
- aug_max_aspect_ratio: 2.0
- aug_min_area_ratio: 0.08
- aug_min_aspect_ratio: 0.5
- validation_data:
- name: kinetics600
- feature_shape: !!python/tuple
- - 32
- - 256
- - 256
- - 3
- temporal_stride: 2
- num_test_clips: 10
- num_test_crops: 3
- global_batch_size: 64
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- optimizer_config:
- learning_rate:
- cosine:
- initial_learning_rate: 0.8
- decay_steps: 71488
- warmup:
- linear:
- warmup_steps: 1787
- train_steps: 71488
- steps_per_loop: 500
- summary_interval: 500
- validation_interval: 500
diff --git a/official/vision/beta/configs/experiments/video_classification/k600_3d-resnet50g_tpu.yaml b/official/vision/beta/configs/experiments/video_classification/k600_3d-resnet50g_tpu.yaml
deleted file mode 100644
index 3ae54c41564f7fefd3a35db8eb66302102995345..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/video_classification/k600_3d-resnet50g_tpu.yaml
+++ /dev/null
@@ -1,112 +0,0 @@
-# 3D ResNet-50g video classification on Kinetics-600.
-#
-# --experiment_type=video_classification_kinetics600
-# Expected accuracy: 78.7% accuracy, 93.6% top-5.
-# Train on TPU: v3-128, eval on TPU: v3-32
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- init_checkpoint: null
- init_checkpoint_modules: all
- losses:
- l2_weight_decay: 0.0001
- label_smoothing: 0.0
- model:
- aggregate_endpoints: false
- backbone:
- resnet_3d:
- block_specs: !!python/tuple
- - temporal_kernel_sizes: !!python/tuple
- - 3
- - 3
- - 3
- temporal_strides: 1
- use_self_gating: true
- - temporal_kernel_sizes: !!python/tuple
- - 3
- - 1
- - 3
- - 1
- temporal_strides: 1
- use_self_gating: true
- - temporal_kernel_sizes: !!python/tuple
- - 3
- - 1
- - 3
- - 1
- - 3
- - 1
- temporal_strides: 1
- use_self_gating: true
- - temporal_kernel_sizes: !!python/tuple
- - 1
- - 3
- - 1
- temporal_strides: 1
- use_self_gating: true
- model_id: 50
- stem_conv_temporal_kernel_size: 5
- stem_conv_temporal_stride: 2
- stem_pool_temporal_stride: 2
- stem_type: v0
- stochastic_depth_drop_rate: 0.0
- type: resnet_3d
- dropout_rate: 0.2
- model_type: video_classification
- norm_activation:
- activation: relu
- norm_epsilon: 1.0e-05
- norm_momentum: 0.9
- use_sync_bn: false
- train_data:
- aug_max_area_ratio: 1.0
- aug_max_aspect_ratio: 2.0
- aug_min_area_ratio: 0.49
- aug_min_aspect_ratio: 0.5
- drop_remainder: true
- dtype: 'bfloat16'
- feature_shape: !!python/tuple
- - 64
- - 224
- - 224
- - 3
- global_batch_size: 1024
- min_image_size: 256
- name: kinetics600
- num_classes: 600
- split: train
- validation_data:
- dtype: 'bfloat16'
- feature_shape: !!python/tuple
- - 250
- - 224
- - 224
- - 3
- global_batch_size: 64
- min_image_size: 256
- name: kinetics600
- num_classes: 600
- num_examples: 27780
- num_test_clips: 1
- num_test_crops: 1
- one_hot: true
-trainer:
- optimizer_config:
- learning_rate:
- cosine:
- alpha: 0.0
- decay_steps: 71400
- initial_learning_rate: 1.6
- name: CosineDecay
- type: cosine
- warmup:
- linear:
- name: linear
- warmup_learning_rate: 0
- warmup_steps: 1785
- type: linear
- train_steps: 71400
- steps_per_loop: 500
- summary_interval: 500
- validation_interval: 500
diff --git a/official/vision/beta/configs/experiments/video_classification/k600_slowonly8x8_tpu.yaml b/official/vision/beta/configs/experiments/video_classification/k600_slowonly8x8_tpu.yaml
deleted file mode 100644
index 43f656ce3f0f501c3e49460c39e564ce5411618a..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/experiments/video_classification/k600_slowonly8x8_tpu.yaml
+++ /dev/null
@@ -1,88 +0,0 @@
-# SlowOnly 8x8 video classification on Kinetics-600.
-#
-# --experiment_type=video_classification_kinetics600
-# Expected accuracy: 77.3% top-1, 93.6% top-5.
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- dropout_rate: 0.5
- norm_activation:
- use_sync_bn: false
- backbone:
- resnet_3d:
- block_specs: !!python/tuple
- - temporal_kernel_sizes: !!python/tuple
- - 1
- - 1
- - 1
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 1
- - 1
- - 1
- - 1
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 3
- - 3
- - 3
- - 3
- - 3
- - 3
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 3
- - 3
- - 3
- temporal_strides: 1
- use_self_gating: false
- model_id: 50
- stem_conv_temporal_kernel_size: 1
- stem_conv_temporal_stride: 1
- stem_pool_temporal_stride: 1
- train_data:
- name: kinetics600
- feature_shape: !!python/tuple
- - 8
- - 224
- - 224
- - 3
- temporal_stride: 8
- global_batch_size: 1024
- dtype: 'bfloat16'
- shuffle_buffer_size: 1024
- aug_max_area_ratio: 1.0
- aug_max_aspect_ratio: 2.0
- aug_min_area_ratio: 0.08
- aug_min_aspect_ratio: 0.5
- validation_data:
- name: kinetics600
- feature_shape: !!python/tuple
- - 8
- - 256
- - 256
- - 3
- temporal_stride: 8
- num_test_clips: 10
- num_test_crops: 3
- global_batch_size: 64
- dtype: 'bfloat16'
- drop_remainder: false
-trainer:
- optimizer_config:
- learning_rate:
- cosine:
- initial_learning_rate: 0.8
- decay_steps: 71488
- warmup:
- linear:
- warmup_steps: 1787
- train_steps: 71488
- steps_per_loop: 500
- summary_interval: 500
- validation_interval: 500
diff --git a/official/vision/beta/configs/image_classification.py b/official/vision/beta/configs/image_classification.py
deleted file mode 100644
index 20ea0c887aafbd0c5dad2433b4543116ec8c628f..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/image_classification.py
+++ /dev/null
@@ -1,398 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Image classification configuration definition."""
-import dataclasses
-import os
-from typing import List, Optional
-
-from official.core import config_definitions as cfg
-from official.core import exp_factory
-from official.modeling import hyperparams
-from official.modeling import optimization
-from official.vision.beta.configs import common
-from official.vision.beta.configs import backbones
-
-
-@dataclasses.dataclass
-class DataConfig(cfg.DataConfig):
- """Input config for training."""
- input_path: str = ''
- global_batch_size: int = 0
- is_training: bool = True
- dtype: str = 'float32'
- shuffle_buffer_size: int = 10000
- cycle_length: int = 10
- is_multilabel: bool = False
- aug_rand_hflip: bool = True
- aug_type: Optional[
- common.Augmentation] = None # Choose from AutoAugment and RandAugment.
- color_jitter: float = 0.
- random_erasing: Optional[common.RandomErasing] = None
- file_type: str = 'tfrecord'
- image_field_key: str = 'image/encoded'
- label_field_key: str = 'image/class/label'
- decode_jpeg_only: bool = True
- mixup_and_cutmix: Optional[common.MixupAndCutmix] = None
- decoder: Optional[common.DataDecoder] = common.DataDecoder()
-
- # Keep for backward compatibility.
- aug_policy: Optional[str] = None # None, 'autoaug', or 'randaug'.
- randaug_magnitude: Optional[int] = 10
-
-
-@dataclasses.dataclass
-class ImageClassificationModel(hyperparams.Config):
- """The model config."""
- num_classes: int = 0
- input_size: List[int] = dataclasses.field(default_factory=list)
- backbone: backbones.Backbone = backbones.Backbone(
- type='resnet', resnet=backbones.ResNet())
- dropout_rate: float = 0.0
- norm_activation: common.NormActivation = common.NormActivation(
- use_sync_bn=False)
- # Adds a BatchNormalization layer pre-GlobalAveragePooling in classification
- add_head_batch_norm: bool = False
- kernel_initializer: str = 'random_uniform'
-
-
-@dataclasses.dataclass
-class Losses(hyperparams.Config):
- loss_weight: float = 1.0
- one_hot: bool = True
- label_smoothing: float = 0.0
- l2_weight_decay: float = 0.0
- soft_labels: bool = False
-
-
-@dataclasses.dataclass
-class Evaluation(hyperparams.Config):
- top_k: int = 5
-
-
-@dataclasses.dataclass
-class ImageClassificationTask(cfg.TaskConfig):
- """The task config."""
- model: ImageClassificationModel = ImageClassificationModel()
- train_data: DataConfig = DataConfig(is_training=True)
- validation_data: DataConfig = DataConfig(is_training=False)
- losses: Losses = Losses()
- evaluation: Evaluation = Evaluation()
- init_checkpoint: Optional[str] = None
- init_checkpoint_modules: str = 'all' # all or backbone
- model_output_keys: Optional[List[int]] = dataclasses.field(
- default_factory=list)
-
-
-@exp_factory.register_config_factory('image_classification')
-def image_classification() -> cfg.ExperimentConfig:
- """Image classification general."""
- return cfg.ExperimentConfig(
- task=ImageClassificationTask(),
- trainer=cfg.TrainerConfig(),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None'
- ])
-
-
-IMAGENET_TRAIN_EXAMPLES = 1281167
-IMAGENET_VAL_EXAMPLES = 50000
-IMAGENET_INPUT_PATH_BASE = 'imagenet-2012-tfrecord'
-
-
-@exp_factory.register_config_factory('resnet_imagenet')
-def image_classification_imagenet() -> cfg.ExperimentConfig:
- """Image classification on imagenet with resnet."""
- train_batch_size = 4096
- eval_batch_size = 4096
- steps_per_epoch = IMAGENET_TRAIN_EXAMPLES // train_batch_size
- config = cfg.ExperimentConfig(
- runtime=cfg.RuntimeConfig(enable_xla=True),
- task=ImageClassificationTask(
- model=ImageClassificationModel(
- num_classes=1001,
- input_size=[224, 224, 3],
- backbone=backbones.Backbone(
- type='resnet', resnet=backbones.ResNet(model_id=50)),
- norm_activation=common.NormActivation(
- norm_momentum=0.9, norm_epsilon=1e-5, use_sync_bn=False)),
- losses=Losses(l2_weight_decay=1e-4),
- train_data=DataConfig(
- input_path=os.path.join(IMAGENET_INPUT_PATH_BASE, 'train*'),
- is_training=True,
- global_batch_size=train_batch_size),
- validation_data=DataConfig(
- input_path=os.path.join(IMAGENET_INPUT_PATH_BASE, 'valid*'),
- is_training=False,
- global_batch_size=eval_batch_size)),
- trainer=cfg.TrainerConfig(
- steps_per_loop=steps_per_epoch,
- summary_interval=steps_per_epoch,
- checkpoint_interval=steps_per_epoch,
- train_steps=90 * steps_per_epoch,
- validation_steps=IMAGENET_VAL_EXAMPLES // eval_batch_size,
- validation_interval=steps_per_epoch,
- optimizer_config=optimization.OptimizationConfig({
- 'optimizer': {
- 'type': 'sgd',
- 'sgd': {
- 'momentum': 0.9
- }
- },
- 'learning_rate': {
- 'type': 'stepwise',
- 'stepwise': {
- 'boundaries': [
- 30 * steps_per_epoch, 60 * steps_per_epoch,
- 80 * steps_per_epoch
- ],
- 'values': [
- 0.1 * train_batch_size / 256,
- 0.01 * train_batch_size / 256,
- 0.001 * train_batch_size / 256,
- 0.0001 * train_batch_size / 256,
- ]
- }
- },
- 'warmup': {
- 'type': 'linear',
- 'linear': {
- 'warmup_steps': 5 * steps_per_epoch,
- 'warmup_learning_rate': 0
- }
- }
- })),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None'
- ])
-
- return config
-
-
-@exp_factory.register_config_factory('resnet_rs_imagenet')
-def image_classification_imagenet_resnetrs() -> cfg.ExperimentConfig:
- """Image classification on imagenet with resnet-rs."""
- train_batch_size = 4096
- eval_batch_size = 4096
- steps_per_epoch = IMAGENET_TRAIN_EXAMPLES // train_batch_size
- config = cfg.ExperimentConfig(
- task=ImageClassificationTask(
- model=ImageClassificationModel(
- num_classes=1001,
- input_size=[160, 160, 3],
- backbone=backbones.Backbone(
- type='resnet',
- resnet=backbones.ResNet(
- model_id=50,
- stem_type='v1',
- resnetd_shortcut=True,
- replace_stem_max_pool=True,
- se_ratio=0.25,
- stochastic_depth_drop_rate=0.0)),
- dropout_rate=0.25,
- norm_activation=common.NormActivation(
- norm_momentum=0.0,
- norm_epsilon=1e-5,
- use_sync_bn=False,
- activation='swish')),
- losses=Losses(l2_weight_decay=4e-5, label_smoothing=0.1),
- train_data=DataConfig(
- input_path=os.path.join(IMAGENET_INPUT_PATH_BASE, 'train*'),
- is_training=True,
- global_batch_size=train_batch_size,
- aug_type=common.Augmentation(
- type='randaug', randaug=common.RandAugment(magnitude=10))),
- validation_data=DataConfig(
- input_path=os.path.join(IMAGENET_INPUT_PATH_BASE, 'valid*'),
- is_training=False,
- global_batch_size=eval_batch_size)),
- trainer=cfg.TrainerConfig(
- steps_per_loop=steps_per_epoch,
- summary_interval=steps_per_epoch,
- checkpoint_interval=steps_per_epoch,
- train_steps=350 * steps_per_epoch,
- validation_steps=IMAGENET_VAL_EXAMPLES // eval_batch_size,
- validation_interval=steps_per_epoch,
- optimizer_config=optimization.OptimizationConfig({
- 'optimizer': {
- 'type': 'sgd',
- 'sgd': {
- 'momentum': 0.9
- }
- },
- 'ema': {
- 'average_decay': 0.9999,
- 'trainable_weights_only': False,
- },
- 'learning_rate': {
- 'type': 'cosine',
- 'cosine': {
- 'initial_learning_rate': 1.6,
- 'decay_steps': 350 * steps_per_epoch
- }
- },
- 'warmup': {
- 'type': 'linear',
- 'linear': {
- 'warmup_steps': 5 * steps_per_epoch,
- 'warmup_learning_rate': 0
- }
- }
- })),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None'
- ])
- return config
-
-
-@exp_factory.register_config_factory('revnet_imagenet')
-def image_classification_imagenet_revnet() -> cfg.ExperimentConfig:
- """Returns a revnet config for image classification on imagenet."""
- train_batch_size = 4096
- eval_batch_size = 4096
- steps_per_epoch = IMAGENET_TRAIN_EXAMPLES // train_batch_size
-
- config = cfg.ExperimentConfig(
- task=ImageClassificationTask(
- model=ImageClassificationModel(
- num_classes=1001,
- input_size=[224, 224, 3],
- backbone=backbones.Backbone(
- type='revnet', revnet=backbones.RevNet(model_id=56)),
- norm_activation=common.NormActivation(
- norm_momentum=0.9, norm_epsilon=1e-5, use_sync_bn=False),
- add_head_batch_norm=True),
- losses=Losses(l2_weight_decay=1e-4),
- train_data=DataConfig(
- input_path=os.path.join(IMAGENET_INPUT_PATH_BASE, 'train*'),
- is_training=True,
- global_batch_size=train_batch_size),
- validation_data=DataConfig(
- input_path=os.path.join(IMAGENET_INPUT_PATH_BASE, 'valid*'),
- is_training=False,
- global_batch_size=eval_batch_size)),
- trainer=cfg.TrainerConfig(
- steps_per_loop=steps_per_epoch,
- summary_interval=steps_per_epoch,
- checkpoint_interval=steps_per_epoch,
- train_steps=90 * steps_per_epoch,
- validation_steps=IMAGENET_VAL_EXAMPLES // eval_batch_size,
- validation_interval=steps_per_epoch,
- optimizer_config=optimization.OptimizationConfig({
- 'optimizer': {
- 'type': 'sgd',
- 'sgd': {
- 'momentum': 0.9
- }
- },
- 'learning_rate': {
- 'type': 'stepwise',
- 'stepwise': {
- 'boundaries': [
- 30 * steps_per_epoch, 60 * steps_per_epoch,
- 80 * steps_per_epoch
- ],
- 'values': [0.8, 0.08, 0.008, 0.0008]
- }
- },
- 'warmup': {
- 'type': 'linear',
- 'linear': {
- 'warmup_steps': 5 * steps_per_epoch,
- 'warmup_learning_rate': 0
- }
- }
- })),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None'
- ])
-
- return config
-
-
-@exp_factory.register_config_factory('mobilenet_imagenet')
-def image_classification_imagenet_mobilenet() -> cfg.ExperimentConfig:
- """Image classification on imagenet with mobilenet."""
- train_batch_size = 4096
- eval_batch_size = 4096
- steps_per_epoch = IMAGENET_TRAIN_EXAMPLES // train_batch_size
- config = cfg.ExperimentConfig(
- task=ImageClassificationTask(
- model=ImageClassificationModel(
- num_classes=1001,
- dropout_rate=0.2,
- input_size=[224, 224, 3],
- backbone=backbones.Backbone(
- type='mobilenet',
- mobilenet=backbones.MobileNet(
- model_id='MobileNetV2', filter_size_scale=1.0)),
- norm_activation=common.NormActivation(
- norm_momentum=0.997, norm_epsilon=1e-3, use_sync_bn=False)),
- losses=Losses(l2_weight_decay=1e-5, label_smoothing=0.1),
- train_data=DataConfig(
- input_path=os.path.join(IMAGENET_INPUT_PATH_BASE, 'train*'),
- is_training=True,
- global_batch_size=train_batch_size),
- validation_data=DataConfig(
- input_path=os.path.join(IMAGENET_INPUT_PATH_BASE, 'valid*'),
- is_training=False,
- global_batch_size=eval_batch_size)),
- trainer=cfg.TrainerConfig(
- steps_per_loop=steps_per_epoch,
- summary_interval=steps_per_epoch,
- checkpoint_interval=steps_per_epoch,
- train_steps=500 * steps_per_epoch,
- validation_steps=IMAGENET_VAL_EXAMPLES // eval_batch_size,
- validation_interval=steps_per_epoch,
- optimizer_config=optimization.OptimizationConfig({
- 'optimizer': {
- 'type': 'rmsprop',
- 'rmsprop': {
- 'rho': 0.9,
- 'momentum': 0.9,
- 'epsilon': 0.002,
- }
- },
- 'learning_rate': {
- 'type': 'exponential',
- 'exponential': {
- 'initial_learning_rate':
- 0.008 * (train_batch_size // 128),
- 'decay_steps':
- int(2.5 * steps_per_epoch),
- 'decay_rate':
- 0.98,
- 'staircase':
- True
- }
- },
- 'warmup': {
- 'type': 'linear',
- 'linear': {
- 'warmup_steps': 5 * steps_per_epoch,
- 'warmup_learning_rate': 0
- }
- },
- })),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None'
- ])
-
- return config
diff --git a/official/vision/beta/configs/image_classification_test.py b/official/vision/beta/configs/image_classification_test.py
deleted file mode 100644
index 0be7e66b6a9de9f8330ac1195e0f974bf7c73ad2..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/image_classification_test.py
+++ /dev/null
@@ -1,49 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for image_classification."""
-# pylint: disable=unused-import
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.core import config_definitions as cfg
-from official.core import exp_factory
-from official.vision import beta
-from official.vision.beta.configs import image_classification as exp_cfg
-
-
-class ImageClassificationConfigTest(tf.test.TestCase, parameterized.TestCase):
-
- @parameterized.parameters(
- ('resnet_imagenet',),
- ('resnet_rs_imagenet',),
- ('revnet_imagenet',),
- ('mobilenet_imagenet'),
- )
- def test_image_classification_configs(self, config_name):
- config = exp_factory.get_exp_config(config_name)
- self.assertIsInstance(config, cfg.ExperimentConfig)
- self.assertIsInstance(config.task, exp_cfg.ImageClassificationTask)
- self.assertIsInstance(config.task.model,
- exp_cfg.ImageClassificationModel)
- self.assertIsInstance(config.task.train_data, exp_cfg.DataConfig)
- config.validate()
- config.task.train_data.is_training = None
- with self.assertRaises(KeyError):
- config.validate()
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/configs/maskrcnn.py b/official/vision/beta/configs/maskrcnn.py
deleted file mode 100644
index 944ad1c4e0fa7953390624ab28c7ad2e7c255516..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/maskrcnn.py
+++ /dev/null
@@ -1,523 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""R-CNN(-RS) configuration definition."""
-
-import dataclasses
-import os
-from typing import List, Optional, Union
-
-from official.core import config_definitions as cfg
-from official.core import exp_factory
-from official.modeling import hyperparams
-from official.modeling import optimization
-from official.vision.beta.configs import common
-from official.vision.beta.configs import decoders
-from official.vision.beta.configs import backbones
-
-
-# pylint: disable=missing-class-docstring
-@dataclasses.dataclass
-class Parser(hyperparams.Config):
- num_channels: int = 3
- match_threshold: float = 0.5
- unmatched_threshold: float = 0.5
- aug_rand_hflip: bool = False
- aug_scale_min: float = 1.0
- aug_scale_max: float = 1.0
- skip_crowd_during_training: bool = True
- max_num_instances: int = 100
- rpn_match_threshold: float = 0.7
- rpn_unmatched_threshold: float = 0.3
- rpn_batch_size_per_im: int = 256
- rpn_fg_fraction: float = 0.5
- mask_crop_size: int = 112
-
-
-@dataclasses.dataclass
-class DataConfig(cfg.DataConfig):
- """Input config for training."""
- input_path: str = ''
- global_batch_size: int = 0
- is_training: bool = False
- dtype: str = 'bfloat16'
- decoder: common.DataDecoder = common.DataDecoder()
- parser: Parser = Parser()
- shuffle_buffer_size: int = 10000
- file_type: str = 'tfrecord'
- drop_remainder: bool = True
- # Number of examples in the data set, it's used to create the annotation file.
- num_examples: int = -1
-
-
-@dataclasses.dataclass
-class Anchor(hyperparams.Config):
- num_scales: int = 1
- aspect_ratios: List[float] = dataclasses.field(
- default_factory=lambda: [0.5, 1.0, 2.0])
- anchor_size: float = 8.0
-
-
-@dataclasses.dataclass
-class RPNHead(hyperparams.Config):
- num_convs: int = 1
- num_filters: int = 256
- use_separable_conv: bool = False
-
-
-@dataclasses.dataclass
-class DetectionHead(hyperparams.Config):
- num_convs: int = 4
- num_filters: int = 256
- use_separable_conv: bool = False
- num_fcs: int = 1
- fc_dims: int = 1024
- class_agnostic_bbox_pred: bool = False # Has to be True for Cascade RCNN.
- # If additional IoUs are passed in 'cascade_iou_thresholds'
- # then ensemble the class probabilities from all heads.
- cascade_class_ensemble: bool = False
-
-
-@dataclasses.dataclass
-class ROIGenerator(hyperparams.Config):
- pre_nms_top_k: int = 2000
- pre_nms_score_threshold: float = 0.0
- pre_nms_min_size_threshold: float = 0.0
- nms_iou_threshold: float = 0.7
- num_proposals: int = 1000
- test_pre_nms_top_k: int = 1000
- test_pre_nms_score_threshold: float = 0.0
- test_pre_nms_min_size_threshold: float = 0.0
- test_nms_iou_threshold: float = 0.7
- test_num_proposals: int = 1000
- use_batched_nms: bool = False
-
-
-@dataclasses.dataclass
-class ROISampler(hyperparams.Config):
- mix_gt_boxes: bool = True
- num_sampled_rois: int = 512
- foreground_fraction: float = 0.25
- foreground_iou_threshold: float = 0.5
- background_iou_high_threshold: float = 0.5
- background_iou_low_threshold: float = 0.0
- # IoU thresholds for additional FRCNN heads in Cascade mode.
- # `foreground_iou_threshold` is the first threshold.
- cascade_iou_thresholds: Optional[List[float]] = None
-
-
-@dataclasses.dataclass
-class ROIAligner(hyperparams.Config):
- crop_size: int = 7
- sample_offset: float = 0.5
-
-
-@dataclasses.dataclass
-class DetectionGenerator(hyperparams.Config):
- apply_nms: bool = True
- pre_nms_top_k: int = 5000
- pre_nms_score_threshold: float = 0.05
- nms_iou_threshold: float = 0.5
- max_num_detections: int = 100
- nms_version: str = 'v2' # `v2`, `v1`, `batched`
- use_cpu_nms: bool = False
- soft_nms_sigma: Optional[float] = None # Only works when nms_version='v1'.
-
-
-@dataclasses.dataclass
-class MaskHead(hyperparams.Config):
- upsample_factor: int = 2
- num_convs: int = 4
- num_filters: int = 256
- use_separable_conv: bool = False
- class_agnostic: bool = False
-
-
-@dataclasses.dataclass
-class MaskSampler(hyperparams.Config):
- num_sampled_masks: int = 128
-
-
-@dataclasses.dataclass
-class MaskROIAligner(hyperparams.Config):
- crop_size: int = 14
- sample_offset: float = 0.5
-
-
-@dataclasses.dataclass
-class MaskRCNN(hyperparams.Config):
- num_classes: int = 0
- input_size: List[int] = dataclasses.field(default_factory=list)
- min_level: int = 2
- max_level: int = 6
- anchor: Anchor = Anchor()
- include_mask: bool = True
- backbone: backbones.Backbone = backbones.Backbone(
- type='resnet', resnet=backbones.ResNet())
- decoder: decoders.Decoder = decoders.Decoder(
- type='fpn', fpn=decoders.FPN())
- rpn_head: RPNHead = RPNHead()
- detection_head: DetectionHead = DetectionHead()
- roi_generator: ROIGenerator = ROIGenerator()
- roi_sampler: ROISampler = ROISampler()
- roi_aligner: ROIAligner = ROIAligner()
- detection_generator: DetectionGenerator = DetectionGenerator()
- mask_head: Optional[MaskHead] = MaskHead()
- mask_sampler: Optional[MaskSampler] = MaskSampler()
- mask_roi_aligner: Optional[MaskROIAligner] = MaskROIAligner()
- norm_activation: common.NormActivation = common.NormActivation(
- norm_momentum=0.997,
- norm_epsilon=0.0001,
- use_sync_bn=True)
-
-
-@dataclasses.dataclass
-class Losses(hyperparams.Config):
- loss_weight: float = 1.0
- rpn_huber_loss_delta: float = 1. / 9.
- frcnn_huber_loss_delta: float = 1.
- l2_weight_decay: float = 0.0
- rpn_score_weight: float = 1.0
- rpn_box_weight: float = 1.0
- frcnn_class_weight: float = 1.0
- frcnn_box_weight: float = 1.0
- mask_weight: float = 1.0
-
-
-@dataclasses.dataclass
-class MaskRCNNTask(cfg.TaskConfig):
- model: MaskRCNN = MaskRCNN()
- train_data: DataConfig = DataConfig(is_training=True)
- validation_data: DataConfig = DataConfig(is_training=False,
- drop_remainder=False)
- losses: Losses = Losses()
- init_checkpoint: Optional[str] = None
- init_checkpoint_modules: Union[
- str, List[str]] = 'all' # all, backbone, and/or decoder
- annotation_file: Optional[str] = None
- per_category_metrics: bool = False
- # If set, we only use masks for the specified class IDs.
- allowed_mask_class_ids: Optional[List[int]] = None
- # If set, the COCO metrics will be computed.
- use_coco_metrics: bool = True
- # If set, the Waymo Open Dataset evaluator would be used.
- use_wod_metrics: bool = False
-
-
-COCO_INPUT_PATH_BASE = 'coco'
-
-
-@exp_factory.register_config_factory('fasterrcnn_resnetfpn_coco')
-def fasterrcnn_resnetfpn_coco() -> cfg.ExperimentConfig:
- """COCO object detection with Faster R-CNN."""
- steps_per_epoch = 500
- coco_val_samples = 5000
- train_batch_size = 64
- eval_batch_size = 8
-
- config = cfg.ExperimentConfig(
- runtime=cfg.RuntimeConfig(mixed_precision_dtype='bfloat16'),
- task=MaskRCNNTask(
- init_checkpoint='gs://cloud-tpu-checkpoints/vision-2.0/resnet50_imagenet/ckpt-28080',
- init_checkpoint_modules='backbone',
- annotation_file=os.path.join(COCO_INPUT_PATH_BASE,
- 'instances_val2017.json'),
- model=MaskRCNN(
- num_classes=91,
- input_size=[1024, 1024, 3],
- include_mask=False,
- mask_head=None,
- mask_sampler=None,
- mask_roi_aligner=None),
- losses=Losses(l2_weight_decay=0.00004),
- train_data=DataConfig(
- input_path=os.path.join(COCO_INPUT_PATH_BASE, 'train*'),
- is_training=True,
- global_batch_size=train_batch_size,
- parser=Parser(
- aug_rand_hflip=True, aug_scale_min=0.8, aug_scale_max=1.25)),
- validation_data=DataConfig(
- input_path=os.path.join(COCO_INPUT_PATH_BASE, 'val*'),
- is_training=False,
- global_batch_size=eval_batch_size,
- drop_remainder=False)),
- trainer=cfg.TrainerConfig(
- train_steps=22500,
- validation_steps=coco_val_samples // eval_batch_size,
- validation_interval=steps_per_epoch,
- steps_per_loop=steps_per_epoch,
- summary_interval=steps_per_epoch,
- checkpoint_interval=steps_per_epoch,
- optimizer_config=optimization.OptimizationConfig({
- 'optimizer': {
- 'type': 'sgd',
- 'sgd': {
- 'momentum': 0.9
- }
- },
- 'learning_rate': {
- 'type': 'stepwise',
- 'stepwise': {
- 'boundaries': [15000, 20000],
- 'values': [0.12, 0.012, 0.0012],
- }
- },
- 'warmup': {
- 'type': 'linear',
- 'linear': {
- 'warmup_steps': 500,
- 'warmup_learning_rate': 0.0067
- }
- }
- })),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None'
- ])
- return config
-
-
-@exp_factory.register_config_factory('maskrcnn_resnetfpn_coco')
-def maskrcnn_resnetfpn_coco() -> cfg.ExperimentConfig:
- """COCO object detection with Mask R-CNN."""
- steps_per_epoch = 500
- coco_val_samples = 5000
- train_batch_size = 64
- eval_batch_size = 8
-
- config = cfg.ExperimentConfig(
- runtime=cfg.RuntimeConfig(
- mixed_precision_dtype='bfloat16', enable_xla=True),
- task=MaskRCNNTask(
- init_checkpoint='gs://cloud-tpu-checkpoints/vision-2.0/resnet50_imagenet/ckpt-28080',
- init_checkpoint_modules='backbone',
- annotation_file=os.path.join(COCO_INPUT_PATH_BASE,
- 'instances_val2017.json'),
- model=MaskRCNN(
- num_classes=91, input_size=[1024, 1024, 3], include_mask=True),
- losses=Losses(l2_weight_decay=0.00004),
- train_data=DataConfig(
- input_path=os.path.join(COCO_INPUT_PATH_BASE, 'train*'),
- is_training=True,
- global_batch_size=train_batch_size,
- parser=Parser(
- aug_rand_hflip=True, aug_scale_min=0.8, aug_scale_max=1.25)),
- validation_data=DataConfig(
- input_path=os.path.join(COCO_INPUT_PATH_BASE, 'val*'),
- is_training=False,
- global_batch_size=eval_batch_size,
- drop_remainder=False)),
- trainer=cfg.TrainerConfig(
- train_steps=22500,
- validation_steps=coco_val_samples // eval_batch_size,
- validation_interval=steps_per_epoch,
- steps_per_loop=steps_per_epoch,
- summary_interval=steps_per_epoch,
- checkpoint_interval=steps_per_epoch,
- optimizer_config=optimization.OptimizationConfig({
- 'optimizer': {
- 'type': 'sgd',
- 'sgd': {
- 'momentum': 0.9
- }
- },
- 'learning_rate': {
- 'type': 'stepwise',
- 'stepwise': {
- 'boundaries': [15000, 20000],
- 'values': [0.12, 0.012, 0.0012],
- }
- },
- 'warmup': {
- 'type': 'linear',
- 'linear': {
- 'warmup_steps': 500,
- 'warmup_learning_rate': 0.0067
- }
- }
- })),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None'
- ])
- return config
-
-
-@exp_factory.register_config_factory('maskrcnn_spinenet_coco')
-def maskrcnn_spinenet_coco() -> cfg.ExperimentConfig:
- """COCO object detection with Mask R-CNN with SpineNet backbone."""
- steps_per_epoch = 463
- coco_val_samples = 5000
- train_batch_size = 256
- eval_batch_size = 8
-
- config = cfg.ExperimentConfig(
- runtime=cfg.RuntimeConfig(mixed_precision_dtype='bfloat16'),
- task=MaskRCNNTask(
- annotation_file=os.path.join(COCO_INPUT_PATH_BASE,
- 'instances_val2017.json'),
- model=MaskRCNN(
- backbone=backbones.Backbone(
- type='spinenet',
- spinenet=backbones.SpineNet(
- model_id='49',
- min_level=3,
- max_level=7,
- )),
- decoder=decoders.Decoder(
- type='identity', identity=decoders.Identity()),
- anchor=Anchor(anchor_size=3),
- norm_activation=common.NormActivation(use_sync_bn=True),
- num_classes=91,
- input_size=[640, 640, 3],
- min_level=3,
- max_level=7,
- include_mask=True),
- losses=Losses(l2_weight_decay=0.00004),
- train_data=DataConfig(
- input_path=os.path.join(COCO_INPUT_PATH_BASE, 'train*'),
- is_training=True,
- global_batch_size=train_batch_size,
- parser=Parser(
- aug_rand_hflip=True, aug_scale_min=0.5, aug_scale_max=2.0)),
- validation_data=DataConfig(
- input_path=os.path.join(COCO_INPUT_PATH_BASE, 'val*'),
- is_training=False,
- global_batch_size=eval_batch_size,
- drop_remainder=False)),
- trainer=cfg.TrainerConfig(
- train_steps=steps_per_epoch * 350,
- validation_steps=coco_val_samples // eval_batch_size,
- validation_interval=steps_per_epoch,
- steps_per_loop=steps_per_epoch,
- summary_interval=steps_per_epoch,
- checkpoint_interval=steps_per_epoch,
- optimizer_config=optimization.OptimizationConfig({
- 'optimizer': {
- 'type': 'sgd',
- 'sgd': {
- 'momentum': 0.9
- }
- },
- 'learning_rate': {
- 'type': 'stepwise',
- 'stepwise': {
- 'boundaries': [
- steps_per_epoch * 320, steps_per_epoch * 340
- ],
- 'values': [0.32, 0.032, 0.0032],
- }
- },
- 'warmup': {
- 'type': 'linear',
- 'linear': {
- 'warmup_steps': 2000,
- 'warmup_learning_rate': 0.0067
- }
- }
- })),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None',
- 'task.model.min_level == task.model.backbone.spinenet.min_level',
- 'task.model.max_level == task.model.backbone.spinenet.max_level',
- ])
- return config
-
-
-@exp_factory.register_config_factory('cascadercnn_spinenet_coco')
-def cascadercnn_spinenet_coco() -> cfg.ExperimentConfig:
- """COCO object detection with Cascade RCNN-RS with SpineNet backbone."""
- steps_per_epoch = 463
- coco_val_samples = 5000
- train_batch_size = 256
- eval_batch_size = 8
-
- config = cfg.ExperimentConfig(
- runtime=cfg.RuntimeConfig(mixed_precision_dtype='bfloat16'),
- task=MaskRCNNTask(
- annotation_file=os.path.join(COCO_INPUT_PATH_BASE,
- 'instances_val2017.json'),
- model=MaskRCNN(
- backbone=backbones.Backbone(
- type='spinenet',
- spinenet=backbones.SpineNet(
- model_id='49',
- min_level=3,
- max_level=7,
- )),
- decoder=decoders.Decoder(
- type='identity', identity=decoders.Identity()),
- roi_sampler=ROISampler(cascade_iou_thresholds=[0.6, 0.7]),
- detection_head=DetectionHead(
- class_agnostic_bbox_pred=True, cascade_class_ensemble=True),
- anchor=Anchor(anchor_size=3),
- norm_activation=common.NormActivation(
- use_sync_bn=True, activation='swish'),
- num_classes=91,
- input_size=[640, 640, 3],
- min_level=3,
- max_level=7,
- include_mask=True),
- losses=Losses(l2_weight_decay=0.00004),
- train_data=DataConfig(
- input_path=os.path.join(COCO_INPUT_PATH_BASE, 'train*'),
- is_training=True,
- global_batch_size=train_batch_size,
- parser=Parser(
- aug_rand_hflip=True, aug_scale_min=0.1, aug_scale_max=2.5)),
- validation_data=DataConfig(
- input_path=os.path.join(COCO_INPUT_PATH_BASE, 'val*'),
- is_training=False,
- global_batch_size=eval_batch_size,
- drop_remainder=False)),
- trainer=cfg.TrainerConfig(
- train_steps=steps_per_epoch * 500,
- validation_steps=coco_val_samples // eval_batch_size,
- validation_interval=steps_per_epoch,
- steps_per_loop=steps_per_epoch,
- summary_interval=steps_per_epoch,
- checkpoint_interval=steps_per_epoch,
- optimizer_config=optimization.OptimizationConfig({
- 'optimizer': {
- 'type': 'sgd',
- 'sgd': {
- 'momentum': 0.9
- }
- },
- 'learning_rate': {
- 'type': 'stepwise',
- 'stepwise': {
- 'boundaries': [
- steps_per_epoch * 475, steps_per_epoch * 490
- ],
- 'values': [0.32, 0.032, 0.0032],
- }
- },
- 'warmup': {
- 'type': 'linear',
- 'linear': {
- 'warmup_steps': 2000,
- 'warmup_learning_rate': 0.0067
- }
- }
- })),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None',
- 'task.model.min_level == task.model.backbone.spinenet.min_level',
- 'task.model.max_level == task.model.backbone.spinenet.max_level',
- ])
- return config
diff --git a/official/vision/beta/configs/maskrcnn_test.py b/official/vision/beta/configs/maskrcnn_test.py
deleted file mode 100644
index 2b57a05c91888daeda111a582ed6685ebab312d1..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/maskrcnn_test.py
+++ /dev/null
@@ -1,47 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for maskrcnn."""
-# pylint: disable=unused-import
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.core import config_definitions as cfg
-from official.core import exp_factory
-from official.vision import beta
-from official.vision.beta.configs import maskrcnn as exp_cfg
-
-
-class MaskRCNNConfigTest(tf.test.TestCase, parameterized.TestCase):
-
- @parameterized.parameters(
- ('fasterrcnn_resnetfpn_coco',),
- ('maskrcnn_resnetfpn_coco',),
- ('maskrcnn_spinenet_coco',),
- ('cascadercnn_spinenet_coco',),
- )
- def test_maskrcnn_configs(self, config_name):
- config = exp_factory.get_exp_config(config_name)
- self.assertIsInstance(config, cfg.ExperimentConfig)
- self.assertIsInstance(config.task, exp_cfg.MaskRCNNTask)
- self.assertIsInstance(config.task.model, exp_cfg.MaskRCNN)
- self.assertIsInstance(config.task.train_data, exp_cfg.DataConfig)
- config.validate()
- config.task.train_data.is_training = None
- with self.assertRaisesRegex(KeyError, 'Found inconsistncy between key'):
- config.validate()
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/configs/retinanet.py b/official/vision/beta/configs/retinanet.py
deleted file mode 100644
index 0f60eb838f3859903dd4bd2b5bd19a8fc24e4320..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/retinanet.py
+++ /dev/null
@@ -1,421 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""RetinaNet configuration definition."""
-
-import dataclasses
-import os
-from typing import List, Optional, Union
-
-from official.core import config_definitions as cfg
-from official.core import exp_factory
-from official.modeling import hyperparams
-from official.modeling import optimization
-from official.vision.beta.configs import common
-from official.vision.beta.configs import decoders
-from official.vision.beta.configs import backbones
-
-
-# pylint: disable=missing-class-docstring
-# Keep for backward compatibility.
-@dataclasses.dataclass
-class TfExampleDecoder(common.TfExampleDecoder):
- """A simple TF Example decoder config."""
-
-
-# Keep for backward compatibility.
-@dataclasses.dataclass
-class TfExampleDecoderLabelMap(common.TfExampleDecoderLabelMap):
- """TF Example decoder with label map config."""
-
-
-# Keep for backward compatibility.
-@dataclasses.dataclass
-class DataDecoder(common.DataDecoder):
- """Data decoder config."""
-
-
-@dataclasses.dataclass
-class Parser(hyperparams.Config):
- num_channels: int = 3
- match_threshold: float = 0.5
- unmatched_threshold: float = 0.5
- aug_rand_hflip: bool = False
- aug_scale_min: float = 1.0
- aug_scale_max: float = 1.0
- skip_crowd_during_training: bool = True
- max_num_instances: int = 100
- # Can choose AutoAugment and RandAugment.
- aug_type: Optional[common.Augmentation] = None
-
- # Keep for backward compatibility. Not used.
- aug_policy: Optional[str] = None
-
-
-@dataclasses.dataclass
-class DataConfig(cfg.DataConfig):
- """Input config for training."""
- input_path: str = ''
- global_batch_size: int = 0
- is_training: bool = False
- dtype: str = 'bfloat16'
- decoder: common.DataDecoder = common.DataDecoder()
- parser: Parser = Parser()
- shuffle_buffer_size: int = 10000
- file_type: str = 'tfrecord'
-
-
-@dataclasses.dataclass
-class Anchor(hyperparams.Config):
- num_scales: int = 3
- aspect_ratios: List[float] = dataclasses.field(
- default_factory=lambda: [0.5, 1.0, 2.0])
- anchor_size: float = 4.0
-
-
-@dataclasses.dataclass
-class Losses(hyperparams.Config):
- loss_weight: float = 1.0
- focal_loss_alpha: float = 0.25
- focal_loss_gamma: float = 1.5
- huber_loss_delta: float = 0.1
- box_loss_weight: int = 50
- l2_weight_decay: float = 0.0
-
-
-@dataclasses.dataclass
-class AttributeHead(hyperparams.Config):
- name: str = ''
- type: str = 'regression'
- size: int = 1
-
-
-@dataclasses.dataclass
-class RetinaNetHead(hyperparams.Config):
- num_convs: int = 4
- num_filters: int = 256
- use_separable_conv: bool = False
- attribute_heads: List[AttributeHead] = dataclasses.field(default_factory=list)
-
-
-@dataclasses.dataclass
-class DetectionGenerator(hyperparams.Config):
- apply_nms: bool = True
- pre_nms_top_k: int = 5000
- pre_nms_score_threshold: float = 0.05
- nms_iou_threshold: float = 0.5
- max_num_detections: int = 100
- nms_version: str = 'v2' # `v2`, `v1`, `batched`.
- use_cpu_nms: bool = False
- soft_nms_sigma: Optional[float] = None # Only works when nms_version='v1'.
-
-
-@dataclasses.dataclass
-class RetinaNet(hyperparams.Config):
- num_classes: int = 0
- input_size: List[int] = dataclasses.field(default_factory=list)
- min_level: int = 3
- max_level: int = 7
- anchor: Anchor = Anchor()
- backbone: backbones.Backbone = backbones.Backbone(
- type='resnet', resnet=backbones.ResNet())
- decoder: decoders.Decoder = decoders.Decoder(
- type='fpn', fpn=decoders.FPN())
- head: RetinaNetHead = RetinaNetHead()
- detection_generator: DetectionGenerator = DetectionGenerator()
- norm_activation: common.NormActivation = common.NormActivation()
-
-
-@dataclasses.dataclass
-class ExportConfig(hyperparams.Config):
- output_normalized_coordinates: bool = False
- cast_num_detections_to_float: bool = False
- cast_detection_classes_to_float: bool = False
-
-
-@dataclasses.dataclass
-class RetinaNetTask(cfg.TaskConfig):
- model: RetinaNet = RetinaNet()
- train_data: DataConfig = DataConfig(is_training=True)
- validation_data: DataConfig = DataConfig(is_training=False)
- losses: Losses = Losses()
- init_checkpoint: Optional[str] = None
- init_checkpoint_modules: Union[
- str, List[str]] = 'all' # all, backbone, and/or decoder
- annotation_file: Optional[str] = None
- per_category_metrics: bool = False
- export_config: ExportConfig = ExportConfig()
-
-
-@exp_factory.register_config_factory('retinanet')
-def retinanet() -> cfg.ExperimentConfig:
- """RetinaNet general config."""
- return cfg.ExperimentConfig(
- task=RetinaNetTask(),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None'
- ])
-
-
-COCO_INPUT_PATH_BASE = 'coco'
-COCO_TRAIN_EXAMPLES = 118287
-COCO_VAL_EXAMPLES = 5000
-
-
-@exp_factory.register_config_factory('retinanet_resnetfpn_coco')
-def retinanet_resnetfpn_coco() -> cfg.ExperimentConfig:
- """COCO object detection with RetinaNet."""
- train_batch_size = 256
- eval_batch_size = 8
- steps_per_epoch = COCO_TRAIN_EXAMPLES // train_batch_size
-
- config = cfg.ExperimentConfig(
- runtime=cfg.RuntimeConfig(mixed_precision_dtype='bfloat16'),
- task=RetinaNetTask(
- init_checkpoint='gs://cloud-tpu-checkpoints/vision-2.0/resnet50_imagenet/ckpt-28080',
- init_checkpoint_modules='backbone',
- annotation_file=os.path.join(COCO_INPUT_PATH_BASE,
- 'instances_val2017.json'),
- model=RetinaNet(
- num_classes=91,
- input_size=[640, 640, 3],
- norm_activation=common.NormActivation(use_sync_bn=False),
- min_level=3,
- max_level=7),
- losses=Losses(l2_weight_decay=1e-4),
- train_data=DataConfig(
- input_path=os.path.join(COCO_INPUT_PATH_BASE, 'train*'),
- is_training=True,
- global_batch_size=train_batch_size,
- parser=Parser(
- aug_rand_hflip=True, aug_scale_min=0.8, aug_scale_max=1.2)),
- validation_data=DataConfig(
- input_path=os.path.join(COCO_INPUT_PATH_BASE, 'val*'),
- is_training=False,
- global_batch_size=eval_batch_size)),
- trainer=cfg.TrainerConfig(
- train_steps=72 * steps_per_epoch,
- validation_steps=COCO_VAL_EXAMPLES // eval_batch_size,
- validation_interval=steps_per_epoch,
- steps_per_loop=steps_per_epoch,
- summary_interval=steps_per_epoch,
- checkpoint_interval=steps_per_epoch,
- optimizer_config=optimization.OptimizationConfig({
- 'optimizer': {
- 'type': 'sgd',
- 'sgd': {
- 'momentum': 0.9
- }
- },
- 'learning_rate': {
- 'type': 'stepwise',
- 'stepwise': {
- 'boundaries': [
- 57 * steps_per_epoch, 67 * steps_per_epoch
- ],
- 'values': [
- 0.32 * train_batch_size / 256.0,
- 0.032 * train_batch_size / 256.0,
- 0.0032 * train_batch_size / 256.0
- ],
- }
- },
- 'warmup': {
- 'type': 'linear',
- 'linear': {
- 'warmup_steps': 500,
- 'warmup_learning_rate': 0.0067
- }
- }
- })),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None'
- ])
-
- return config
-
-
-@exp_factory.register_config_factory('retinanet_spinenet_coco')
-def retinanet_spinenet_coco() -> cfg.ExperimentConfig:
- """COCO object detection with RetinaNet using SpineNet backbone."""
- train_batch_size = 256
- eval_batch_size = 8
- steps_per_epoch = COCO_TRAIN_EXAMPLES // train_batch_size
- input_size = 640
-
- config = cfg.ExperimentConfig(
- runtime=cfg.RuntimeConfig(mixed_precision_dtype='float32'),
- task=RetinaNetTask(
- annotation_file=os.path.join(COCO_INPUT_PATH_BASE,
- 'instances_val2017.json'),
- model=RetinaNet(
- backbone=backbones.Backbone(
- type='spinenet',
- spinenet=backbones.SpineNet(
- model_id='49',
- stochastic_depth_drop_rate=0.2,
- min_level=3,
- max_level=7)),
- decoder=decoders.Decoder(
- type='identity', identity=decoders.Identity()),
- anchor=Anchor(anchor_size=3),
- norm_activation=common.NormActivation(
- use_sync_bn=True, activation='swish'),
- num_classes=91,
- input_size=[input_size, input_size, 3],
- min_level=3,
- max_level=7),
- losses=Losses(l2_weight_decay=4e-5),
- train_data=DataConfig(
- input_path=os.path.join(COCO_INPUT_PATH_BASE, 'train*'),
- is_training=True,
- global_batch_size=train_batch_size,
- parser=Parser(
- aug_rand_hflip=True, aug_scale_min=0.1, aug_scale_max=2.0)),
- validation_data=DataConfig(
- input_path=os.path.join(COCO_INPUT_PATH_BASE, 'val*'),
- is_training=False,
- global_batch_size=eval_batch_size)),
- trainer=cfg.TrainerConfig(
- train_steps=500 * steps_per_epoch,
- validation_steps=COCO_VAL_EXAMPLES // eval_batch_size,
- validation_interval=steps_per_epoch,
- steps_per_loop=steps_per_epoch,
- summary_interval=steps_per_epoch,
- checkpoint_interval=steps_per_epoch,
- optimizer_config=optimization.OptimizationConfig({
- 'optimizer': {
- 'type': 'sgd',
- 'sgd': {
- 'momentum': 0.9
- }
- },
- 'learning_rate': {
- 'type': 'stepwise',
- 'stepwise': {
- 'boundaries': [
- 475 * steps_per_epoch, 490 * steps_per_epoch
- ],
- 'values': [
- 0.32 * train_batch_size / 256.0,
- 0.032 * train_batch_size / 256.0,
- 0.0032 * train_batch_size / 256.0
- ],
- }
- },
- 'warmup': {
- 'type': 'linear',
- 'linear': {
- 'warmup_steps': 2000,
- 'warmup_learning_rate': 0.0067
- }
- }
- })),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None',
- 'task.model.min_level == task.model.backbone.spinenet.min_level',
- 'task.model.max_level == task.model.backbone.spinenet.max_level',
- ])
-
- return config
-
-
-@exp_factory.register_config_factory('retinanet_mobile_coco')
-def retinanet_spinenet_mobile_coco() -> cfg.ExperimentConfig:
- """COCO object detection with mobile RetinaNet."""
- train_batch_size = 256
- eval_batch_size = 8
- steps_per_epoch = COCO_TRAIN_EXAMPLES // train_batch_size
- input_size = 384
-
- config = cfg.ExperimentConfig(
- runtime=cfg.RuntimeConfig(mixed_precision_dtype='float32'),
- task=RetinaNetTask(
- annotation_file=os.path.join(COCO_INPUT_PATH_BASE,
- 'instances_val2017.json'),
- model=RetinaNet(
- backbone=backbones.Backbone(
- type='spinenet_mobile',
- spinenet_mobile=backbones.SpineNetMobile(
- model_id='49',
- stochastic_depth_drop_rate=0.2,
- min_level=3,
- max_level=7,
- use_keras_upsampling_2d=False)),
- decoder=decoders.Decoder(
- type='identity', identity=decoders.Identity()),
- head=RetinaNetHead(num_filters=48, use_separable_conv=True),
- anchor=Anchor(anchor_size=3),
- norm_activation=common.NormActivation(
- use_sync_bn=True, activation='swish'),
- num_classes=91,
- input_size=[input_size, input_size, 3],
- min_level=3,
- max_level=7),
- losses=Losses(l2_weight_decay=3e-5),
- train_data=DataConfig(
- input_path=os.path.join(COCO_INPUT_PATH_BASE, 'train*'),
- is_training=True,
- global_batch_size=train_batch_size,
- parser=Parser(
- aug_rand_hflip=True, aug_scale_min=0.1, aug_scale_max=2.0)),
- validation_data=DataConfig(
- input_path=os.path.join(COCO_INPUT_PATH_BASE, 'val*'),
- is_training=False,
- global_batch_size=eval_batch_size)),
- trainer=cfg.TrainerConfig(
- train_steps=600 * steps_per_epoch,
- validation_steps=COCO_VAL_EXAMPLES // eval_batch_size,
- validation_interval=steps_per_epoch,
- steps_per_loop=steps_per_epoch,
- summary_interval=steps_per_epoch,
- checkpoint_interval=steps_per_epoch,
- optimizer_config=optimization.OptimizationConfig({
- 'optimizer': {
- 'type': 'sgd',
- 'sgd': {
- 'momentum': 0.9
- }
- },
- 'learning_rate': {
- 'type': 'stepwise',
- 'stepwise': {
- 'boundaries': [
- 575 * steps_per_epoch, 590 * steps_per_epoch
- ],
- 'values': [
- 0.32 * train_batch_size / 256.0,
- 0.032 * train_batch_size / 256.0,
- 0.0032 * train_batch_size / 256.0
- ],
- }
- },
- 'warmup': {
- 'type': 'linear',
- 'linear': {
- 'warmup_steps': 2000,
- 'warmup_learning_rate': 0.0067
- }
- }
- })),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None',
- ])
-
- return config
diff --git a/official/vision/beta/configs/retinanet_test.py b/official/vision/beta/configs/retinanet_test.py
deleted file mode 100644
index 4586bf75f946b1b7632f86df0277057508381f45..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/retinanet_test.py
+++ /dev/null
@@ -1,46 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for retinanet."""
-# pylint: disable=unused-import
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.core import config_definitions as cfg
-from official.core import exp_factory
-from official.vision import beta
-from official.vision.beta.configs import retinanet as exp_cfg
-
-
-class RetinaNetConfigTest(tf.test.TestCase, parameterized.TestCase):
-
- @parameterized.parameters(
- ('retinanet_resnetfpn_coco',),
- ('retinanet_spinenet_coco',),
- ('retinanet_mobile_coco',),
- )
- def test_retinanet_configs(self, config_name):
- config = exp_factory.get_exp_config(config_name)
- self.assertIsInstance(config, cfg.ExperimentConfig)
- self.assertIsInstance(config.task, exp_cfg.RetinaNetTask)
- self.assertIsInstance(config.task.model, exp_cfg.RetinaNet)
- self.assertIsInstance(config.task.train_data, exp_cfg.DataConfig)
- config.validate()
- config.task.train_data.is_training = None
- with self.assertRaisesRegex(KeyError, 'Found inconsistncy between key'):
- config.validate()
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/configs/semantic_segmentation.py b/official/vision/beta/configs/semantic_segmentation.py
deleted file mode 100644
index ca2af2cf360fa3c12b1e0370bd97bc0c3d705664..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/semantic_segmentation.py
+++ /dev/null
@@ -1,713 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Semantic segmentation configuration definition."""
-import dataclasses
-import os
-from typing import List, Optional, Union
-
-import numpy as np
-from official.core import config_definitions as cfg
-from official.core import exp_factory
-from official.modeling import hyperparams
-from official.modeling import optimization
-from official.vision.beta.configs import common
-from official.vision.beta.configs import decoders
-from official.vision.beta.configs import backbones
-
-
-@dataclasses.dataclass
-class DataConfig(cfg.DataConfig):
- """Input config for training."""
- output_size: List[int] = dataclasses.field(default_factory=list)
- # If crop_size is specified, image will be resized first to
- # output_size, then crop of size crop_size will be cropped.
- crop_size: List[int] = dataclasses.field(default_factory=list)
- input_path: str = ''
- global_batch_size: int = 0
- is_training: bool = True
- dtype: str = 'float32'
- shuffle_buffer_size: int = 1000
- cycle_length: int = 10
- # If resize_eval_groundtruth is set to False, original image sizes are used
- # for eval. In that case, groundtruth_padded_size has to be specified too to
- # allow for batching the variable input sizes of images.
- resize_eval_groundtruth: bool = True
- groundtruth_padded_size: List[int] = dataclasses.field(default_factory=list)
- aug_scale_min: float = 1.0
- aug_scale_max: float = 1.0
- aug_rand_hflip: bool = True
- preserve_aspect_ratio: bool = True
- aug_policy: Optional[str] = None
- drop_remainder: bool = True
- file_type: str = 'tfrecord'
- decoder: Optional[common.DataDecoder] = common.DataDecoder()
-
-
-@dataclasses.dataclass
-class SegmentationHead(hyperparams.Config):
- """Segmentation head config."""
- level: int = 3
- num_convs: int = 2
- num_filters: int = 256
- use_depthwise_convolution: bool = False
- prediction_kernel_size: int = 1
- upsample_factor: int = 1
- feature_fusion: Optional[
- str] = None # None, deeplabv3plus, panoptic_fpn_fusion or pyramid_fusion
- # deeplabv3plus feature fusion params
- low_level: Union[int, str] = 2
- low_level_num_filters: int = 48
- # panoptic_fpn_fusion params
- decoder_min_level: Optional[Union[int, str]] = None
- decoder_max_level: Optional[Union[int, str]] = None
-
-
-@dataclasses.dataclass
-class MaskScoringHead(hyperparams.Config):
- """Mask Scoring head config."""
- num_convs: int = 4
- num_filters: int = 128
- fc_input_size: List[int] = dataclasses.field(default_factory=list)
- num_fcs: int = 2
- fc_dims: int = 1024
-
-
-@dataclasses.dataclass
-class SemanticSegmentationModel(hyperparams.Config):
- """Semantic segmentation model config."""
- num_classes: int = 0
- input_size: List[int] = dataclasses.field(default_factory=list)
- min_level: int = 3
- max_level: int = 6
- head: SegmentationHead = SegmentationHead()
- backbone: backbones.Backbone = backbones.Backbone(
- type='resnet', resnet=backbones.ResNet())
- decoder: decoders.Decoder = decoders.Decoder(type='identity')
- mask_scoring_head: Optional[MaskScoringHead] = None
- norm_activation: common.NormActivation = common.NormActivation()
-
-
-@dataclasses.dataclass
-class Losses(hyperparams.Config):
- loss_weight: float = 1.0
- label_smoothing: float = 0.0
- ignore_label: int = 255
- class_weights: List[float] = dataclasses.field(default_factory=list)
- l2_weight_decay: float = 0.0
- use_groundtruth_dimension: bool = True
- top_k_percent_pixels: float = 1.0
-
-
-@dataclasses.dataclass
-class Evaluation(hyperparams.Config):
- report_per_class_iou: bool = True
- report_train_mean_iou: bool = True # Turning this off can speed up training.
-
-
-@dataclasses.dataclass
-class SemanticSegmentationTask(cfg.TaskConfig):
- """The model config."""
- model: SemanticSegmentationModel = SemanticSegmentationModel()
- train_data: DataConfig = DataConfig(is_training=True)
- validation_data: DataConfig = DataConfig(is_training=False)
- losses: Losses = Losses()
- evaluation: Evaluation = Evaluation()
- train_input_partition_dims: List[int] = dataclasses.field(
- default_factory=list)
- eval_input_partition_dims: List[int] = dataclasses.field(
- default_factory=list)
- init_checkpoint: Optional[str] = None
- init_checkpoint_modules: Union[
- str, List[str]] = 'all' # all, backbone, and/or decoder
-
-
-@exp_factory.register_config_factory('semantic_segmentation')
-def semantic_segmentation() -> cfg.ExperimentConfig:
- """Semantic segmentation general."""
- return cfg.ExperimentConfig(
- task=SemanticSegmentationTask(),
- trainer=cfg.TrainerConfig(),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None'
- ])
-
-# PASCAL VOC 2012 Dataset
-PASCAL_TRAIN_EXAMPLES = 10582
-PASCAL_VAL_EXAMPLES = 1449
-PASCAL_INPUT_PATH_BASE = 'gs://**/pascal_voc_seg'
-
-
-@exp_factory.register_config_factory('seg_deeplabv3_pascal')
-def seg_deeplabv3_pascal() -> cfg.ExperimentConfig:
- """Image segmentation on pascal voc with resnet deeplabv3."""
- train_batch_size = 16
- eval_batch_size = 8
- steps_per_epoch = PASCAL_TRAIN_EXAMPLES // train_batch_size
- output_stride = 16
- aspp_dilation_rates = [12, 24, 36] # [6, 12, 18] if output_stride = 16
- multigrid = [1, 2, 4]
- stem_type = 'v1'
- level = int(np.math.log2(output_stride))
- config = cfg.ExperimentConfig(
- task=SemanticSegmentationTask(
- model=SemanticSegmentationModel(
- num_classes=21,
- input_size=[None, None, 3],
- backbone=backbones.Backbone(
- type='dilated_resnet', dilated_resnet=backbones.DilatedResNet(
- model_id=101, output_stride=output_stride,
- multigrid=multigrid, stem_type=stem_type)),
- decoder=decoders.Decoder(
- type='aspp', aspp=decoders.ASPP(
- level=level, dilation_rates=aspp_dilation_rates)),
- head=SegmentationHead(level=level, num_convs=0),
- norm_activation=common.NormActivation(
- activation='swish',
- norm_momentum=0.9997,
- norm_epsilon=1e-3,
- use_sync_bn=True)),
- losses=Losses(l2_weight_decay=1e-4),
- train_data=DataConfig(
- input_path=os.path.join(PASCAL_INPUT_PATH_BASE, 'train_aug*'),
- # TODO(arashwan): test changing size to 513 to match deeplab.
- output_size=[512, 512],
- is_training=True,
- global_batch_size=train_batch_size,
- aug_scale_min=0.5,
- aug_scale_max=2.0),
- validation_data=DataConfig(
- input_path=os.path.join(PASCAL_INPUT_PATH_BASE, 'val*'),
- output_size=[512, 512],
- is_training=False,
- global_batch_size=eval_batch_size,
- resize_eval_groundtruth=False,
- groundtruth_padded_size=[512, 512],
- drop_remainder=False),
- # resnet101
- init_checkpoint='gs://cloud-tpu-checkpoints/vision-2.0/deeplab/deeplab_resnet101_imagenet/ckpt-62400',
- init_checkpoint_modules='backbone'),
- trainer=cfg.TrainerConfig(
- steps_per_loop=steps_per_epoch,
- summary_interval=steps_per_epoch,
- checkpoint_interval=steps_per_epoch,
- train_steps=45 * steps_per_epoch,
- validation_steps=PASCAL_VAL_EXAMPLES // eval_batch_size,
- validation_interval=steps_per_epoch,
- optimizer_config=optimization.OptimizationConfig({
- 'optimizer': {
- 'type': 'sgd',
- 'sgd': {
- 'momentum': 0.9
- }
- },
- 'learning_rate': {
- 'type': 'polynomial',
- 'polynomial': {
- 'initial_learning_rate': 0.007,
- 'decay_steps': 45 * steps_per_epoch,
- 'end_learning_rate': 0.0,
- 'power': 0.9
- }
- },
- 'warmup': {
- 'type': 'linear',
- 'linear': {
- 'warmup_steps': 5 * steps_per_epoch,
- 'warmup_learning_rate': 0
- }
- }
- })),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None'
- ])
-
- return config
-
-
-@exp_factory.register_config_factory('seg_deeplabv3plus_pascal')
-def seg_deeplabv3plus_pascal() -> cfg.ExperimentConfig:
- """Image segmentation on pascal voc with resnet deeplabv3+."""
- train_batch_size = 16
- eval_batch_size = 8
- steps_per_epoch = PASCAL_TRAIN_EXAMPLES // train_batch_size
- output_stride = 16
- aspp_dilation_rates = [6, 12, 18]
- multigrid = [1, 2, 4]
- stem_type = 'v1'
- level = int(np.math.log2(output_stride))
- config = cfg.ExperimentConfig(
- task=SemanticSegmentationTask(
- model=SemanticSegmentationModel(
- num_classes=21,
- input_size=[None, None, 3],
- backbone=backbones.Backbone(
- type='dilated_resnet', dilated_resnet=backbones.DilatedResNet(
- model_id=101, output_stride=output_stride,
- stem_type=stem_type, multigrid=multigrid)),
- decoder=decoders.Decoder(
- type='aspp',
- aspp=decoders.ASPP(
- level=level, dilation_rates=aspp_dilation_rates)),
- head=SegmentationHead(
- level=level,
- num_convs=2,
- feature_fusion='deeplabv3plus',
- low_level=2,
- low_level_num_filters=48),
- norm_activation=common.NormActivation(
- activation='swish',
- norm_momentum=0.9997,
- norm_epsilon=1e-3,
- use_sync_bn=True)),
- losses=Losses(l2_weight_decay=1e-4),
- train_data=DataConfig(
- input_path=os.path.join(PASCAL_INPUT_PATH_BASE, 'train_aug*'),
- output_size=[512, 512],
- is_training=True,
- global_batch_size=train_batch_size,
- aug_scale_min=0.5,
- aug_scale_max=2.0),
- validation_data=DataConfig(
- input_path=os.path.join(PASCAL_INPUT_PATH_BASE, 'val*'),
- output_size=[512, 512],
- is_training=False,
- global_batch_size=eval_batch_size,
- resize_eval_groundtruth=False,
- groundtruth_padded_size=[512, 512],
- drop_remainder=False),
- # resnet101
- init_checkpoint='gs://cloud-tpu-checkpoints/vision-2.0/deeplab/deeplab_resnet101_imagenet/ckpt-62400',
- init_checkpoint_modules='backbone'),
- trainer=cfg.TrainerConfig(
- steps_per_loop=steps_per_epoch,
- summary_interval=steps_per_epoch,
- checkpoint_interval=steps_per_epoch,
- train_steps=45 * steps_per_epoch,
- validation_steps=PASCAL_VAL_EXAMPLES // eval_batch_size,
- validation_interval=steps_per_epoch,
- optimizer_config=optimization.OptimizationConfig({
- 'optimizer': {
- 'type': 'sgd',
- 'sgd': {
- 'momentum': 0.9
- }
- },
- 'learning_rate': {
- 'type': 'polynomial',
- 'polynomial': {
- 'initial_learning_rate': 0.007,
- 'decay_steps': 45 * steps_per_epoch,
- 'end_learning_rate': 0.0,
- 'power': 0.9
- }
- },
- 'warmup': {
- 'type': 'linear',
- 'linear': {
- 'warmup_steps': 5 * steps_per_epoch,
- 'warmup_learning_rate': 0
- }
- }
- })),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None'
- ])
-
- return config
-
-
-@exp_factory.register_config_factory('seg_resnetfpn_pascal')
-def seg_resnetfpn_pascal() -> cfg.ExperimentConfig:
- """Image segmentation on pascal voc with resnet-fpn."""
- train_batch_size = 256
- eval_batch_size = 32
- steps_per_epoch = PASCAL_TRAIN_EXAMPLES // train_batch_size
- config = cfg.ExperimentConfig(
- task=SemanticSegmentationTask(
- model=SemanticSegmentationModel(
- num_classes=21,
- input_size=[512, 512, 3],
- min_level=3,
- max_level=7,
- backbone=backbones.Backbone(
- type='resnet', resnet=backbones.ResNet(model_id=50)),
- decoder=decoders.Decoder(type='fpn', fpn=decoders.FPN()),
- head=SegmentationHead(level=3, num_convs=3),
- norm_activation=common.NormActivation(
- activation='swish',
- use_sync_bn=True)),
- losses=Losses(l2_weight_decay=1e-4),
- train_data=DataConfig(
- input_path=os.path.join(PASCAL_INPUT_PATH_BASE, 'train_aug*'),
- is_training=True,
- global_batch_size=train_batch_size,
- aug_scale_min=0.2,
- aug_scale_max=1.5),
- validation_data=DataConfig(
- input_path=os.path.join(PASCAL_INPUT_PATH_BASE, 'val*'),
- is_training=False,
- global_batch_size=eval_batch_size,
- resize_eval_groundtruth=False,
- groundtruth_padded_size=[512, 512],
- drop_remainder=False),
- ),
- trainer=cfg.TrainerConfig(
- steps_per_loop=steps_per_epoch,
- summary_interval=steps_per_epoch,
- checkpoint_interval=steps_per_epoch,
- train_steps=450 * steps_per_epoch,
- validation_steps=PASCAL_VAL_EXAMPLES // eval_batch_size,
- validation_interval=steps_per_epoch,
- optimizer_config=optimization.OptimizationConfig({
- 'optimizer': {
- 'type': 'sgd',
- 'sgd': {
- 'momentum': 0.9
- }
- },
- 'learning_rate': {
- 'type': 'polynomial',
- 'polynomial': {
- 'initial_learning_rate': 0.007,
- 'decay_steps': 450 * steps_per_epoch,
- 'end_learning_rate': 0.0,
- 'power': 0.9
- }
- },
- 'warmup': {
- 'type': 'linear',
- 'linear': {
- 'warmup_steps': 5 * steps_per_epoch,
- 'warmup_learning_rate': 0
- }
- }
- })),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None'
- ])
-
- return config
-
-
-@exp_factory.register_config_factory('mnv2_deeplabv3_pascal')
-def mnv2_deeplabv3_pascal() -> cfg.ExperimentConfig:
- """Image segmentation on pascal with mobilenetv2 deeplabv3."""
- train_batch_size = 16
- eval_batch_size = 16
- steps_per_epoch = PASCAL_TRAIN_EXAMPLES // train_batch_size
- output_stride = 16
- aspp_dilation_rates = []
- level = int(np.math.log2(output_stride))
- pool_kernel_size = []
-
- config = cfg.ExperimentConfig(
- task=SemanticSegmentationTask(
- model=SemanticSegmentationModel(
- num_classes=21,
- input_size=[None, None, 3],
- backbone=backbones.Backbone(
- type='mobilenet',
- mobilenet=backbones.MobileNet(
- model_id='MobileNetV2', output_stride=output_stride)),
- decoder=decoders.Decoder(
- type='aspp',
- aspp=decoders.ASPP(
- level=level,
- dilation_rates=aspp_dilation_rates,
- pool_kernel_size=pool_kernel_size)),
- head=SegmentationHead(level=level, num_convs=0),
- norm_activation=common.NormActivation(
- activation='relu',
- norm_momentum=0.99,
- norm_epsilon=1e-3,
- use_sync_bn=True)),
- losses=Losses(l2_weight_decay=4e-5),
- train_data=DataConfig(
- input_path=os.path.join(PASCAL_INPUT_PATH_BASE, 'train_aug*'),
- output_size=[512, 512],
- is_training=True,
- global_batch_size=train_batch_size,
- aug_scale_min=0.5,
- aug_scale_max=2.0),
- validation_data=DataConfig(
- input_path=os.path.join(PASCAL_INPUT_PATH_BASE, 'val*'),
- output_size=[512, 512],
- is_training=False,
- global_batch_size=eval_batch_size,
- resize_eval_groundtruth=False,
- groundtruth_padded_size=[512, 512],
- drop_remainder=False),
- # mobilenetv2
- init_checkpoint='gs://tf_model_garden/cloud/vision-2.0/deeplab/deeplabv3_mobilenetv2_coco/best_ckpt-63',
- init_checkpoint_modules=['backbone', 'decoder']),
- trainer=cfg.TrainerConfig(
- steps_per_loop=steps_per_epoch,
- summary_interval=steps_per_epoch,
- checkpoint_interval=steps_per_epoch,
- train_steps=30000,
- validation_steps=PASCAL_VAL_EXAMPLES // eval_batch_size,
- validation_interval=steps_per_epoch,
- best_checkpoint_eval_metric='mean_iou',
- best_checkpoint_export_subdir='best_ckpt',
- best_checkpoint_metric_comp='higher',
- optimizer_config=optimization.OptimizationConfig({
- 'optimizer': {
- 'type': 'sgd',
- 'sgd': {
- 'momentum': 0.9
- }
- },
- 'learning_rate': {
- 'type': 'polynomial',
- 'polynomial': {
- 'initial_learning_rate': 0.007 * train_batch_size / 16,
- 'decay_steps': 30000,
- 'end_learning_rate': 0.0,
- 'power': 0.9
- }
- },
- 'warmup': {
- 'type': 'linear',
- 'linear': {
- 'warmup_steps': 5 * steps_per_epoch,
- 'warmup_learning_rate': 0
- }
- }
- })),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None'
- ])
-
- return config
-
-
-# Cityscapes Dataset (Download and process the dataset yourself)
-CITYSCAPES_TRAIN_EXAMPLES = 2975
-CITYSCAPES_VAL_EXAMPLES = 500
-CITYSCAPES_INPUT_PATH_BASE = 'cityscapes'
-
-
-@exp_factory.register_config_factory('seg_deeplabv3plus_cityscapes')
-def seg_deeplabv3plus_cityscapes() -> cfg.ExperimentConfig:
- """Image segmentation on cityscapes with resnet deeplabv3+."""
- train_batch_size = 16
- eval_batch_size = 16
- steps_per_epoch = CITYSCAPES_TRAIN_EXAMPLES // train_batch_size
- output_stride = 16
- aspp_dilation_rates = [6, 12, 18]
- multigrid = [1, 2, 4]
- stem_type = 'v1'
- level = int(np.math.log2(output_stride))
- config = cfg.ExperimentConfig(
- task=SemanticSegmentationTask(
- model=SemanticSegmentationModel(
- # Cityscapes uses only 19 semantic classes for train/evaluation.
- # The void (background) class is ignored in train and evaluation.
- num_classes=19,
- input_size=[None, None, 3],
- backbone=backbones.Backbone(
- type='dilated_resnet', dilated_resnet=backbones.DilatedResNet(
- model_id=101, output_stride=output_stride,
- stem_type=stem_type, multigrid=multigrid)),
- decoder=decoders.Decoder(
- type='aspp',
- aspp=decoders.ASPP(
- level=level, dilation_rates=aspp_dilation_rates,
- pool_kernel_size=[512, 1024])),
- head=SegmentationHead(
- level=level,
- num_convs=2,
- feature_fusion='deeplabv3plus',
- low_level=2,
- low_level_num_filters=48),
- norm_activation=common.NormActivation(
- activation='swish',
- norm_momentum=0.99,
- norm_epsilon=1e-3,
- use_sync_bn=True)),
- losses=Losses(l2_weight_decay=1e-4),
- train_data=DataConfig(
- input_path=os.path.join(CITYSCAPES_INPUT_PATH_BASE,
- 'train_fine**'),
- crop_size=[512, 1024],
- output_size=[1024, 2048],
- is_training=True,
- global_batch_size=train_batch_size,
- aug_scale_min=0.5,
- aug_scale_max=2.0),
- validation_data=DataConfig(
- input_path=os.path.join(CITYSCAPES_INPUT_PATH_BASE, 'val_fine*'),
- output_size=[1024, 2048],
- is_training=False,
- global_batch_size=eval_batch_size,
- resize_eval_groundtruth=True,
- drop_remainder=False),
- # resnet101
- init_checkpoint='gs://cloud-tpu-checkpoints/vision-2.0/deeplab/deeplab_resnet101_imagenet/ckpt-62400',
- init_checkpoint_modules='backbone'),
- trainer=cfg.TrainerConfig(
- steps_per_loop=steps_per_epoch,
- summary_interval=steps_per_epoch,
- checkpoint_interval=steps_per_epoch,
- train_steps=500 * steps_per_epoch,
- validation_steps=CITYSCAPES_VAL_EXAMPLES // eval_batch_size,
- validation_interval=steps_per_epoch,
- optimizer_config=optimization.OptimizationConfig({
- 'optimizer': {
- 'type': 'sgd',
- 'sgd': {
- 'momentum': 0.9
- }
- },
- 'learning_rate': {
- 'type': 'polynomial',
- 'polynomial': {
- 'initial_learning_rate': 0.01,
- 'decay_steps': 500 * steps_per_epoch,
- 'end_learning_rate': 0.0,
- 'power': 0.9
- }
- },
- 'warmup': {
- 'type': 'linear',
- 'linear': {
- 'warmup_steps': 5 * steps_per_epoch,
- 'warmup_learning_rate': 0
- }
- }
- })),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None'
- ])
-
- return config
-
-
-@exp_factory.register_config_factory('mnv2_deeplabv3_cityscapes')
-def mnv2_deeplabv3_cityscapes() -> cfg.ExperimentConfig:
- """Image segmentation on cityscapes with mobilenetv2 deeplabv3."""
- train_batch_size = 16
- eval_batch_size = 16
- steps_per_epoch = CITYSCAPES_TRAIN_EXAMPLES // train_batch_size
- output_stride = 16
- aspp_dilation_rates = []
- pool_kernel_size = [512, 1024]
-
- level = int(np.math.log2(output_stride))
- config = cfg.ExperimentConfig(
- task=SemanticSegmentationTask(
- model=SemanticSegmentationModel(
- # Cityscapes uses only 19 semantic classes for train/evaluation.
- # The void (background) class is ignored in train and evaluation.
- num_classes=19,
- input_size=[None, None, 3],
- backbone=backbones.Backbone(
- type='mobilenet',
- mobilenet=backbones.MobileNet(
- model_id='MobileNetV2', output_stride=output_stride)),
- decoder=decoders.Decoder(
- type='aspp',
- aspp=decoders.ASPP(
- level=level,
- dilation_rates=aspp_dilation_rates,
- pool_kernel_size=pool_kernel_size)),
- head=SegmentationHead(level=level, num_convs=0),
- norm_activation=common.NormActivation(
- activation='relu',
- norm_momentum=0.99,
- norm_epsilon=1e-3,
- use_sync_bn=True)),
- losses=Losses(l2_weight_decay=4e-5),
- train_data=DataConfig(
- input_path=os.path.join(CITYSCAPES_INPUT_PATH_BASE,
- 'train_fine**'),
- crop_size=[512, 1024],
- output_size=[1024, 2048],
- is_training=True,
- global_batch_size=train_batch_size,
- aug_scale_min=0.5,
- aug_scale_max=2.0),
- validation_data=DataConfig(
- input_path=os.path.join(CITYSCAPES_INPUT_PATH_BASE, 'val_fine*'),
- output_size=[1024, 2048],
- is_training=False,
- global_batch_size=eval_batch_size,
- resize_eval_groundtruth=True,
- drop_remainder=False),
- # Coco pre-trained mobilenetv2 checkpoint
- init_checkpoint='gs://tf_model_garden/cloud/vision-2.0/deeplab/deeplabv3_mobilenetv2_coco/best_ckpt-63',
- init_checkpoint_modules='backbone'),
- trainer=cfg.TrainerConfig(
- steps_per_loop=steps_per_epoch,
- summary_interval=steps_per_epoch,
- checkpoint_interval=steps_per_epoch,
- train_steps=100000,
- validation_steps=CITYSCAPES_VAL_EXAMPLES // eval_batch_size,
- validation_interval=steps_per_epoch,
- best_checkpoint_eval_metric='mean_iou',
- best_checkpoint_export_subdir='best_ckpt',
- best_checkpoint_metric_comp='higher',
- optimizer_config=optimization.OptimizationConfig({
- 'optimizer': {
- 'type': 'sgd',
- 'sgd': {
- 'momentum': 0.9
- }
- },
- 'learning_rate': {
- 'type': 'polynomial',
- 'polynomial': {
- 'initial_learning_rate': 0.01,
- 'decay_steps': 100000,
- 'end_learning_rate': 0.0,
- 'power': 0.9
- }
- },
- 'warmup': {
- 'type': 'linear',
- 'linear': {
- 'warmup_steps': 5 * steps_per_epoch,
- 'warmup_learning_rate': 0
- }
- }
- })),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None'
- ])
-
- return config
-
-
-@exp_factory.register_config_factory('mnv2_deeplabv3plus_cityscapes')
-def mnv2_deeplabv3plus_cityscapes() -> cfg.ExperimentConfig:
- """Image segmentation on cityscapes with mobilenetv2 deeplabv3plus."""
- config = mnv2_deeplabv3_cityscapes()
- config.task.model.head = SegmentationHead(
- level=4,
- num_convs=2,
- feature_fusion='deeplabv3plus',
- use_depthwise_convolution=True,
- low_level='2/depthwise',
- low_level_num_filters=48)
- config.task.model.backbone.mobilenet.output_intermediate_endpoints = True
- return config
diff --git a/official/vision/beta/configs/semantic_segmentation_test.py b/official/vision/beta/configs/semantic_segmentation_test.py
deleted file mode 100644
index 1c71a49362db55a40d68767a93860f9bd69168e6..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/semantic_segmentation_test.py
+++ /dev/null
@@ -1,46 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for semantic_segmentation."""
-
-# pylint: disable=unused-import
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.core import config_definitions as cfg
-from official.core import exp_factory
-from official.vision import beta
-from official.vision.beta.configs import semantic_segmentation as exp_cfg
-
-
-class ImageSegmentationConfigTest(tf.test.TestCase, parameterized.TestCase):
-
- @parameterized.parameters(('seg_deeplabv3_pascal',),
- ('seg_deeplabv3plus_pascal',))
- def test_semantic_segmentation_configs(self, config_name):
- config = exp_factory.get_exp_config(config_name)
- self.assertIsInstance(config, cfg.ExperimentConfig)
- self.assertIsInstance(config.task, exp_cfg.SemanticSegmentationTask)
- self.assertIsInstance(config.task.model,
- exp_cfg.SemanticSegmentationModel)
- self.assertIsInstance(config.task.train_data, exp_cfg.DataConfig)
- config.validate()
- config.task.train_data.is_training = None
- with self.assertRaises(KeyError):
- config.validate()
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/configs/video_classification.py b/official/vision/beta/configs/video_classification.py
deleted file mode 100644
index b84aa808c724083da4077bbd039a6589b67b8d22..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/video_classification.py
+++ /dev/null
@@ -1,371 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Video classification configuration definition."""
-import dataclasses
-from typing import Optional, Tuple
-from official.core import config_definitions as cfg
-from official.core import exp_factory
-from official.modeling import hyperparams
-from official.modeling import optimization
-from official.vision.beta.configs import backbones_3d
-from official.vision.beta.configs import common
-
-
-@dataclasses.dataclass
-class DataConfig(cfg.DataConfig):
- """The base configuration for building datasets."""
- name: Optional[str] = None
- file_type: Optional[str] = 'tfrecord'
- compressed_input: bool = False
- split: str = 'train'
- variant_name: Optional[str] = None
- feature_shape: Tuple[int, ...] = (64, 224, 224, 3)
- temporal_stride: int = 1
- random_stride_range: int = 0
- num_test_clips: int = 1
- num_test_crops: int = 1
- num_classes: int = -1
- num_examples: int = -1
- global_batch_size: int = 128
- data_format: str = 'channels_last'
- dtype: str = 'float32'
- one_hot: bool = True
- shuffle_buffer_size: int = 64
- cache: bool = False
- input_path: str = ''
- is_training: bool = True
- cycle_length: int = 10
- drop_remainder: bool = True
- min_image_size: int = 256
- is_multilabel: bool = False
- output_audio: bool = False
- audio_feature: str = ''
- audio_feature_shape: Tuple[int, ...] = (-1,)
- aug_min_aspect_ratio: float = 0.5
- aug_max_aspect_ratio: float = 2.0
- aug_min_area_ratio: float = 0.49
- aug_max_area_ratio: float = 1.0
- aug_type: Optional[str] = None # 'autoaug', 'randaug', or None
- image_field_key: str = 'image/encoded'
- label_field_key: str = 'clip/label/index'
-
-
-def kinetics400(is_training):
- """Generated Kinectics 400 dataset configs."""
- return DataConfig(
- name='kinetics400',
- num_classes=400,
- is_training=is_training,
- split='train' if is_training else 'valid',
- drop_remainder=is_training,
- num_examples=215570 if is_training else 17706,
- feature_shape=(64, 224, 224, 3) if is_training else (250, 224, 224, 3))
-
-
-def kinetics600(is_training):
- """Generated Kinectics 600 dataset configs."""
- return DataConfig(
- name='kinetics600',
- num_classes=600,
- is_training=is_training,
- split='train' if is_training else 'valid',
- drop_remainder=is_training,
- num_examples=366016 if is_training else 27780,
- feature_shape=(64, 224, 224, 3) if is_training else (250, 224, 224, 3))
-
-
-def kinetics700(is_training):
- """Generated Kinectics 600 dataset configs."""
- return DataConfig(
- name='kinetics700',
- num_classes=700,
- is_training=is_training,
- split='train' if is_training else 'valid',
- drop_remainder=is_training,
- num_examples=522883 if is_training else 33441,
- feature_shape=(64, 224, 224, 3) if is_training else (250, 224, 224, 3))
-
-
-def kinetics700_2020(is_training):
- """Generated Kinectics 600 dataset configs."""
- return DataConfig(
- name='kinetics700',
- num_classes=700,
- is_training=is_training,
- split='train' if is_training else 'valid',
- drop_remainder=is_training,
- num_examples=535982 if is_training else 33640,
- feature_shape=(64, 224, 224, 3) if is_training else (250, 224, 224, 3))
-
-
-@dataclasses.dataclass
-class VideoClassificationModel(hyperparams.Config):
- """The model config."""
- model_type: str = 'video_classification'
- backbone: backbones_3d.Backbone3D = backbones_3d.Backbone3D(
- type='resnet_3d', resnet_3d=backbones_3d.ResNet3D50())
- norm_activation: common.NormActivation = common.NormActivation(
- use_sync_bn=False)
- dropout_rate: float = 0.2
- aggregate_endpoints: bool = False
- require_endpoints: Optional[Tuple[str, ...]] = None
-
-
-@dataclasses.dataclass
-class Losses(hyperparams.Config):
- one_hot: bool = True
- label_smoothing: float = 0.0
- l2_weight_decay: float = 0.0
-
-
-@dataclasses.dataclass
-class Metrics(hyperparams.Config):
- use_per_class_recall: bool = False
-
-
-@dataclasses.dataclass
-class VideoClassificationTask(cfg.TaskConfig):
- """The task config."""
- model: VideoClassificationModel = VideoClassificationModel()
- train_data: DataConfig = DataConfig(is_training=True, drop_remainder=True)
- validation_data: DataConfig = DataConfig(
- is_training=False, drop_remainder=False)
- losses: Losses = Losses()
- metrics: Metrics = Metrics()
- init_checkpoint: Optional[str] = None
- init_checkpoint_modules: str = 'all' # all or backbone
- # Spatial Partitioning fields.
- train_input_partition_dims: Optional[Tuple[int, ...]] = None
- eval_input_partition_dims: Optional[Tuple[int, ...]] = None
-
-
-def add_trainer(experiment: cfg.ExperimentConfig,
- train_batch_size: int,
- eval_batch_size: int,
- learning_rate: float = 1.6,
- train_epochs: int = 44,
- warmup_epochs: int = 5):
- """Add and config a trainer to the experiment config."""
- if experiment.task.train_data.num_examples <= 0:
- raise ValueError('Wrong train dataset size {!r}'.format(
- experiment.task.train_data))
- if experiment.task.validation_data.num_examples <= 0:
- raise ValueError('Wrong validation dataset size {!r}'.format(
- experiment.task.validation_data))
- experiment.task.train_data.global_batch_size = train_batch_size
- experiment.task.validation_data.global_batch_size = eval_batch_size
- steps_per_epoch = experiment.task.train_data.num_examples // train_batch_size
- experiment.trainer = cfg.TrainerConfig(
- steps_per_loop=steps_per_epoch,
- summary_interval=steps_per_epoch,
- checkpoint_interval=steps_per_epoch,
- train_steps=train_epochs * steps_per_epoch,
- validation_steps=experiment.task.validation_data.num_examples //
- eval_batch_size,
- validation_interval=steps_per_epoch,
- optimizer_config=optimization.OptimizationConfig({
- 'optimizer': {
- 'type': 'sgd',
- 'sgd': {
- 'momentum': 0.9,
- 'nesterov': True,
- }
- },
- 'learning_rate': {
- 'type': 'cosine',
- 'cosine': {
- 'initial_learning_rate': learning_rate,
- 'decay_steps': train_epochs * steps_per_epoch,
- }
- },
- 'warmup': {
- 'type': 'linear',
- 'linear': {
- 'warmup_steps': warmup_epochs * steps_per_epoch,
- 'warmup_learning_rate': 0
- }
- }
- }))
- return experiment
-
-
-@exp_factory.register_config_factory('video_classification')
-def video_classification() -> cfg.ExperimentConfig:
- """Video classification general."""
- return cfg.ExperimentConfig(
- runtime=cfg.RuntimeConfig(mixed_precision_dtype='bfloat16'),
- task=VideoClassificationTask(),
- trainer=cfg.TrainerConfig(),
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None',
- 'task.train_data.num_classes == task.validation_data.num_classes',
- ])
-
-
-@exp_factory.register_config_factory('video_classification_ucf101')
-def video_classification_ucf101() -> cfg.ExperimentConfig:
- """Video classification on UCF-101 with resnet."""
- train_dataset = DataConfig(
- name='ucf101',
- num_classes=101,
- is_training=True,
- split='train',
- drop_remainder=True,
- num_examples=9537,
- temporal_stride=2,
- feature_shape=(32, 224, 224, 3))
- train_dataset.tfds_name = 'ucf101'
- train_dataset.tfds_split = 'train'
- validation_dataset = DataConfig(
- name='ucf101',
- num_classes=101,
- is_training=True,
- split='test',
- drop_remainder=False,
- num_examples=3783,
- temporal_stride=2,
- feature_shape=(32, 224, 224, 3))
- validation_dataset.tfds_name = 'ucf101'
- validation_dataset.tfds_split = 'test'
- task = VideoClassificationTask(
- model=VideoClassificationModel(
- backbone=backbones_3d.Backbone3D(
- type='resnet_3d', resnet_3d=backbones_3d.ResNet3D50()),
- norm_activation=common.NormActivation(
- norm_momentum=0.9, norm_epsilon=1e-5, use_sync_bn=False)),
- losses=Losses(l2_weight_decay=1e-4),
- train_data=train_dataset,
- validation_data=validation_dataset)
- config = cfg.ExperimentConfig(
- runtime=cfg.RuntimeConfig(mixed_precision_dtype='bfloat16'),
- task=task,
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None',
- 'task.train_data.num_classes == task.validation_data.num_classes',
- ])
- add_trainer(
- config,
- train_batch_size=64,
- eval_batch_size=16,
- learning_rate=0.8,
- train_epochs=100)
- return config
-
-
-@exp_factory.register_config_factory('video_classification_kinetics400')
-def video_classification_kinetics400() -> cfg.ExperimentConfig:
- """Video classification on Kinectics 400 with resnet."""
- train_dataset = kinetics400(is_training=True)
- validation_dataset = kinetics400(is_training=False)
- task = VideoClassificationTask(
- model=VideoClassificationModel(
- backbone=backbones_3d.Backbone3D(
- type='resnet_3d', resnet_3d=backbones_3d.ResNet3D50()),
- norm_activation=common.NormActivation(
- norm_momentum=0.9, norm_epsilon=1e-5, use_sync_bn=False)),
- losses=Losses(l2_weight_decay=1e-4),
- train_data=train_dataset,
- validation_data=validation_dataset)
- config = cfg.ExperimentConfig(
- runtime=cfg.RuntimeConfig(mixed_precision_dtype='bfloat16'),
- task=task,
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None',
- 'task.train_data.num_classes == task.validation_data.num_classes',
- ])
- add_trainer(config, train_batch_size=1024, eval_batch_size=64)
- return config
-
-
-@exp_factory.register_config_factory('video_classification_kinetics600')
-def video_classification_kinetics600() -> cfg.ExperimentConfig:
- """Video classification on Kinectics 600 with resnet."""
- train_dataset = kinetics600(is_training=True)
- validation_dataset = kinetics600(is_training=False)
- task = VideoClassificationTask(
- model=VideoClassificationModel(
- backbone=backbones_3d.Backbone3D(
- type='resnet_3d', resnet_3d=backbones_3d.ResNet3D50()),
- norm_activation=common.NormActivation(
- norm_momentum=0.9, norm_epsilon=1e-5, use_sync_bn=False)),
- losses=Losses(l2_weight_decay=1e-4),
- train_data=train_dataset,
- validation_data=validation_dataset)
- config = cfg.ExperimentConfig(
- runtime=cfg.RuntimeConfig(mixed_precision_dtype='bfloat16'),
- task=task,
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None',
- 'task.train_data.num_classes == task.validation_data.num_classes',
- ])
- add_trainer(config, train_batch_size=1024, eval_batch_size=64)
- return config
-
-
-@exp_factory.register_config_factory('video_classification_kinetics700')
-def video_classification_kinetics700() -> cfg.ExperimentConfig:
- """Video classification on Kinectics 700 with resnet."""
- train_dataset = kinetics700(is_training=True)
- validation_dataset = kinetics700(is_training=False)
- task = VideoClassificationTask(
- model=VideoClassificationModel(
- backbone=backbones_3d.Backbone3D(
- type='resnet_3d', resnet_3d=backbones_3d.ResNet3D50()),
- norm_activation=common.NormActivation(
- norm_momentum=0.9, norm_epsilon=1e-5, use_sync_bn=False)),
- losses=Losses(l2_weight_decay=1e-4),
- train_data=train_dataset,
- validation_data=validation_dataset)
- config = cfg.ExperimentConfig(
- runtime=cfg.RuntimeConfig(mixed_precision_dtype='bfloat16'),
- task=task,
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None',
- 'task.train_data.num_classes == task.validation_data.num_classes',
- ])
- add_trainer(config, train_batch_size=1024, eval_batch_size=64)
- return config
-
-
-@exp_factory.register_config_factory('video_classification_kinetics700_2020')
-def video_classification_kinetics700_2020() -> cfg.ExperimentConfig:
- """Video classification on Kinectics 700 2020 with resnet."""
- train_dataset = kinetics700_2020(is_training=True)
- validation_dataset = kinetics700_2020(is_training=False)
- task = VideoClassificationTask(
- model=VideoClassificationModel(
- backbone=backbones_3d.Backbone3D(
- type='resnet_3d', resnet_3d=backbones_3d.ResNet3D50()),
- norm_activation=common.NormActivation(
- norm_momentum=0.9, norm_epsilon=1e-5, use_sync_bn=False)),
- losses=Losses(l2_weight_decay=1e-4),
- train_data=train_dataset,
- validation_data=validation_dataset)
- config = cfg.ExperimentConfig(
- runtime=cfg.RuntimeConfig(mixed_precision_dtype='bfloat16'),
- task=task,
- restrictions=[
- 'task.train_data.is_training != None',
- 'task.validation_data.is_training != None',
- 'task.train_data.num_classes == task.validation_data.num_classes',
- ])
- add_trainer(config, train_batch_size=1024, eval_batch_size=64)
- return config
diff --git a/official/vision/beta/configs/video_classification_test.py b/official/vision/beta/configs/video_classification_test.py
deleted file mode 100644
index 1fda7bd2e613f78f022a970ba023ef4a7e1d4cc2..0000000000000000000000000000000000000000
--- a/official/vision/beta/configs/video_classification_test.py
+++ /dev/null
@@ -1,45 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for video_classification."""
-
-# pylint: disable=unused-import
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.core import config_definitions as cfg
-from official.core import exp_factory
-from official.vision import beta
-from official.vision.beta.configs import video_classification as exp_cfg
-
-
-class VideoClassificationConfigTest(tf.test.TestCase, parameterized.TestCase):
-
- @parameterized.parameters(('video_classification',),
- ('video_classification_kinetics600',))
- def test_video_classification_configs(self, config_name):
- config = exp_factory.get_exp_config(config_name)
- self.assertIsInstance(config, cfg.ExperimentConfig)
- self.assertIsInstance(config.task, exp_cfg.VideoClassificationTask)
- self.assertIsInstance(config.task.model, exp_cfg.VideoClassificationModel)
- self.assertIsInstance(config.task.train_data, exp_cfg.DataConfig)
- config.validate()
- config.task.train_data.is_training = None
- with self.assertRaises(KeyError):
- config.validate()
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/data/create_coco_tf_record.py b/official/vision/beta/data/create_coco_tf_record.py
deleted file mode 100644
index 531500db24ec381659c16254d12cf76f92619043..0000000000000000000000000000000000000000
--- a/official/vision/beta/data/create_coco_tf_record.py
+++ /dev/null
@@ -1,554 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-r"""Convert raw COCO dataset to TFRecord format.
-
-This scripts follows the label map decoder format and supports detection
-boxes, instance masks and captions.
-
-Example usage:
- python create_coco_tf_record.py --logtostderr \
- --image_dir="${TRAIN_IMAGE_DIR}" \
- --image_info_file="${TRAIN_IMAGE_INFO_FILE}" \
- --object_annotations_file="${TRAIN_ANNOTATIONS_FILE}" \
- --caption_annotations_file="${CAPTION_ANNOTATIONS_FILE}" \
- --output_file_prefix="${OUTPUT_DIR/FILE_PREFIX}" \
- --num_shards=100
-"""
-
-import collections
-import json
-import logging
-import os
-
-from absl import app # pylint:disable=unused-import
-from absl import flags
-import numpy as np
-
-from pycocotools import mask
-import tensorflow as tf
-
-import multiprocessing as mp
-from official.vision.beta.data import tfrecord_lib
-
-
-flags.DEFINE_boolean(
- 'include_masks', False, 'Whether to include instance segmentations masks '
- '(PNG encoded) in the result. default: False.')
-flags.DEFINE_multi_string('image_dir', '', 'Directory containing images.')
-flags.DEFINE_string(
- 'image_info_file', '', 'File containing image information. '
- 'Tf Examples in the output files correspond to the image '
- 'info entries in this file. If this file is not provided '
- 'object_annotations_file is used if present. Otherwise, '
- 'caption_annotations_file is used to get image info.')
-flags.DEFINE_string(
- 'object_annotations_file', '', 'File containing object '
- 'annotations - boxes and instance masks.')
-flags.DEFINE_string('caption_annotations_file', '', 'File containing image '
- 'captions.')
-flags.DEFINE_string('panoptic_annotations_file', '', 'File containing panoptic '
- 'annotations.')
-flags.DEFINE_string('panoptic_masks_dir', '',
- 'Directory containing panoptic masks annotations.')
-flags.DEFINE_boolean(
- 'include_panoptic_masks', False, 'Whether to include category and '
- 'instance masks in the result. These are required to run the PQ evaluator '
- 'default: False.')
-flags.DEFINE_string('output_file_prefix', '/tmp/train', 'Path to output file')
-flags.DEFINE_integer('num_shards', 32, 'Number of shards for output file.')
-
-FLAGS = flags.FLAGS
-
-logger = tf.get_logger()
-logger.setLevel(logging.INFO)
-
-_VOID_LABEL = 0
-_VOID_INSTANCE_ID = 0
-_THING_CLASS_ID = 1
-_STUFF_CLASSES_OFFSET = 90
-
-
-def coco_segmentation_to_mask_png(segmentation, height, width, is_crowd):
- """Encode a COCO mask segmentation as PNG string."""
- run_len_encoding = mask.frPyObjects(segmentation, height, width)
- binary_mask = mask.decode(run_len_encoding)
- if not is_crowd:
- binary_mask = np.amax(binary_mask, axis=2)
-
- return tfrecord_lib.encode_mask_as_png(binary_mask)
-
-
-def generate_coco_panoptics_masks(segments_info, mask_path,
- include_panoptic_masks,
- is_category_thing):
- """Creates masks for panoptic segmentation task.
-
- Args:
- segments_info: a list of dicts, where each dict has keys: [u'id',
- u'category_id', u'area', u'bbox', u'iscrowd'], detailing information for
- each segment in the panoptic mask.
- mask_path: path to the panoptic mask.
- include_panoptic_masks: bool, when set to True, category and instance
- masks are included in the outputs. Set this to True, when using
- the Panoptic Quality evaluator.
- is_category_thing: a dict with category ids as keys and, 0/1 as values to
- represent "stuff" and "things" classes respectively.
-
- Returns:
- A dict with with keys: [u'semantic_segmentation_mask', u'category_mask',
- u'instance_mask']. The dict contains 'category_mask' and 'instance_mask'
- only if `include_panoptic_eval_masks` is set to True.
- """
- rgb_mask = tfrecord_lib.read_image(mask_path)
- r, g, b = np.split(rgb_mask, 3, axis=-1)
-
- # decode rgb encoded panoptic mask to get segments ids
- # refer https://cocodataset.org/#format-data
- segments_encoded_mask = (r + g * 256 + b * (256**2)).squeeze()
-
- semantic_segmentation_mask = np.ones_like(
- segments_encoded_mask, dtype=np.uint8) * _VOID_LABEL
- if include_panoptic_masks:
- category_mask = np.ones_like(
- segments_encoded_mask, dtype=np.uint8) * _VOID_LABEL
- instance_mask = np.ones_like(
- segments_encoded_mask, dtype=np.uint8) * _VOID_INSTANCE_ID
-
- for idx, segment in enumerate(segments_info):
- segment_id = segment['id']
- category_id = segment['category_id']
-
- if is_category_thing[category_id]:
- encoded_category_id = _THING_CLASS_ID
- instance_id = idx + 1
- else:
- encoded_category_id = category_id - _STUFF_CLASSES_OFFSET
- instance_id = _VOID_INSTANCE_ID
-
- segment_mask = (segments_encoded_mask == segment_id)
- semantic_segmentation_mask[segment_mask] = encoded_category_id
-
- if include_panoptic_masks:
- category_mask[segment_mask] = category_id
- instance_mask[segment_mask] = instance_id
-
- outputs = {
- 'semantic_segmentation_mask': tfrecord_lib.encode_mask_as_png(
- semantic_segmentation_mask)
- }
-
- if include_panoptic_masks:
- outputs.update({
- 'category_mask': tfrecord_lib.encode_mask_as_png(category_mask),
- 'instance_mask': tfrecord_lib.encode_mask_as_png(instance_mask)
- })
- return outputs
-
-
-def coco_annotations_to_lists(bbox_annotations, id_to_name_map,
- image_height, image_width, include_masks):
- """Converts COCO annotations to feature lists."""
-
- data = dict((k, list()) for k in
- ['xmin', 'xmax', 'ymin', 'ymax', 'is_crowd',
- 'category_id', 'category_names', 'area'])
- if include_masks:
- data['encoded_mask_png'] = []
-
- num_annotations_skipped = 0
-
- for object_annotations in bbox_annotations:
- (x, y, width, height) = tuple(object_annotations['bbox'])
-
- if width <= 0 or height <= 0:
- num_annotations_skipped += 1
- continue
- if x + width > image_width or y + height > image_height:
- num_annotations_skipped += 1
- continue
- data['xmin'].append(float(x) / image_width)
- data['xmax'].append(float(x + width) / image_width)
- data['ymin'].append(float(y) / image_height)
- data['ymax'].append(float(y + height) / image_height)
- data['is_crowd'].append(object_annotations['iscrowd'])
- category_id = int(object_annotations['category_id'])
- data['category_id'].append(category_id)
- data['category_names'].append(id_to_name_map[category_id].encode('utf8'))
- data['area'].append(object_annotations['area'])
-
- if include_masks:
- data['encoded_mask_png'].append(
- coco_segmentation_to_mask_png(object_annotations['segmentation'],
- image_height, image_width,
- object_annotations['iscrowd'])
- )
-
- return data, num_annotations_skipped
-
-
-def bbox_annotations_to_feature_dict(
- bbox_annotations, image_height, image_width, id_to_name_map, include_masks):
- """Convert COCO annotations to an encoded feature dict."""
-
- data, num_skipped = coco_annotations_to_lists(
- bbox_annotations, id_to_name_map, image_height, image_width,
- include_masks)
- feature_dict = {
- 'image/object/bbox/xmin':
- tfrecord_lib.convert_to_feature(data['xmin']),
- 'image/object/bbox/xmax':
- tfrecord_lib.convert_to_feature(data['xmax']),
- 'image/object/bbox/ymin':
- tfrecord_lib.convert_to_feature(data['ymin']),
- 'image/object/bbox/ymax':
- tfrecord_lib.convert_to_feature(data['ymax']),
- 'image/object/class/text':
- tfrecord_lib.convert_to_feature(data['category_names']),
- 'image/object/class/label':
- tfrecord_lib.convert_to_feature(data['category_id']),
- 'image/object/is_crowd':
- tfrecord_lib.convert_to_feature(data['is_crowd']),
- 'image/object/area':
- tfrecord_lib.convert_to_feature(data['area']),
- }
- if include_masks:
- feature_dict['image/object/mask'] = (
- tfrecord_lib.convert_to_feature(data['encoded_mask_png']))
-
- return feature_dict, num_skipped
-
-
-def encode_caption_annotations(caption_annotations):
- captions = []
- for caption_annotation in caption_annotations:
- captions.append(caption_annotation['caption'].encode('utf8'))
-
- return captions
-
-
-def create_tf_example(image,
- image_dirs,
- panoptic_masks_dir=None,
- bbox_annotations=None,
- id_to_name_map=None,
- caption_annotations=None,
- panoptic_annotation=None,
- is_category_thing=None,
- include_panoptic_masks=False,
- include_masks=False):
- """Converts image and annotations to a tf.Example proto.
-
- Args:
- image: dict with keys: [u'license', u'file_name', u'coco_url', u'height',
- u'width', u'date_captured', u'flickr_url', u'id']
- image_dirs: list of directories containing the image files.
- panoptic_masks_dir: `str` of the panoptic masks directory.
- bbox_annotations:
- list of dicts with keys: [u'segmentation', u'area', u'iscrowd',
- u'image_id', u'bbox', u'category_id', u'id'] Notice that bounding box
- coordinates in the official COCO dataset are given as [x, y, width,
- height] tuples using absolute coordinates where x, y represent the
- top-left (0-indexed) corner. This function converts to the format
- expected by the Tensorflow Object Detection API (which is which is
- [ymin, xmin, ymax, xmax] with coordinates normalized relative to image
- size).
- id_to_name_map: a dict mapping category IDs to string names.
- caption_annotations:
- list of dict with keys: [u'id', u'image_id', u'str'].
- panoptic_annotation: dict with keys: [u'image_id', u'file_name',
- u'segments_info']. Where the value for segments_info is a list of dicts,
- with each dict containing information for a single segment in the mask.
- is_category_thing: `bool`, whether it is a category thing.
- include_panoptic_masks: `bool`, whether to include panoptic masks.
- include_masks: Whether to include instance segmentations masks
- (PNG encoded) in the result. default: False.
-
- Returns:
- example: The converted tf.Example
- num_annotations_skipped: Number of (invalid) annotations that were ignored.
-
- Raises:
- ValueError: if the image pointed to by data['filename'] is not a valid JPEG,
- does not exist, or is not unique across image directories.
- """
- image_height = image['height']
- image_width = image['width']
- filename = image['file_name']
- image_id = image['id']
-
- if len(image_dirs) > 1:
- full_paths = [os.path.join(image_dir, filename) for image_dir in image_dirs]
- full_existing_paths = [p for p in full_paths if tf.io.gfile.exists(p)]
- if not full_existing_paths:
- raise ValueError(
- '{} does not exist across image directories.'.format(filename))
- if len(full_existing_paths) > 1:
- raise ValueError(
- '{} is not unique across image directories'.format(filename))
- full_path, = full_existing_paths
- # If there is only one image directory, it's not worth checking for existence,
- # since trying to open the file will raise an informative error message if it
- # does not exist.
- else:
- image_dir, = image_dirs
- full_path = os.path.join(image_dir, filename)
-
- with tf.io.gfile.GFile(full_path, 'rb') as fid:
- encoded_jpg = fid.read()
-
- feature_dict = tfrecord_lib.image_info_to_feature_dict(
- image_height, image_width, filename, image_id, encoded_jpg, 'jpg')
-
- num_annotations_skipped = 0
- if bbox_annotations:
- box_feature_dict, num_skipped = bbox_annotations_to_feature_dict(
- bbox_annotations, image_height, image_width, id_to_name_map,
- include_masks)
- num_annotations_skipped += num_skipped
- feature_dict.update(box_feature_dict)
-
- if caption_annotations:
- encoded_captions = encode_caption_annotations(caption_annotations)
- feature_dict.update(
- {'image/caption': tfrecord_lib.convert_to_feature(encoded_captions)})
-
- if panoptic_annotation:
- segments_info = panoptic_annotation['segments_info']
- panoptic_mask_filename = os.path.join(
- panoptic_masks_dir,
- panoptic_annotation['file_name'])
- encoded_panoptic_masks = generate_coco_panoptics_masks(
- segments_info, panoptic_mask_filename, include_panoptic_masks,
- is_category_thing)
- feature_dict.update(
- {'image/segmentation/class/encoded': tfrecord_lib.convert_to_feature(
- encoded_panoptic_masks['semantic_segmentation_mask'])})
-
- if include_panoptic_masks:
- feature_dict.update({
- 'image/panoptic/category_mask': tfrecord_lib.convert_to_feature(
- encoded_panoptic_masks['category_mask']),
- 'image/panoptic/instance_mask': tfrecord_lib.convert_to_feature(
- encoded_panoptic_masks['instance_mask'])
- })
-
- example = tf.train.Example(features=tf.train.Features(feature=feature_dict))
- return example, num_annotations_skipped
-
-
-def _load_object_annotations(object_annotations_file):
- """Loads object annotation JSON file."""
- with tf.io.gfile.GFile(object_annotations_file, 'r') as fid:
- obj_annotations = json.load(fid)
-
- images = obj_annotations['images']
- id_to_name_map = dict((element['id'], element['name']) for element in
- obj_annotations['categories'])
-
- img_to_obj_annotation = collections.defaultdict(list)
- logging.info('Building bounding box index.')
- for annotation in obj_annotations['annotations']:
- image_id = annotation['image_id']
- img_to_obj_annotation[image_id].append(annotation)
-
- missing_annotation_count = 0
- for image in images:
- image_id = image['id']
- if image_id not in img_to_obj_annotation:
- missing_annotation_count += 1
-
- logging.info('%d images are missing bboxes.', missing_annotation_count)
-
- return img_to_obj_annotation, id_to_name_map
-
-
-def _load_caption_annotations(caption_annotations_file):
- """Loads caption annotation JSON file."""
- with tf.io.gfile.GFile(caption_annotations_file, 'r') as fid:
- caption_annotations = json.load(fid)
-
- img_to_caption_annotation = collections.defaultdict(list)
- logging.info('Building caption index.')
- for annotation in caption_annotations['annotations']:
- image_id = annotation['image_id']
- img_to_caption_annotation[image_id].append(annotation)
-
- missing_annotation_count = 0
- images = caption_annotations['images']
- for image in images:
- image_id = image['id']
- if image_id not in img_to_caption_annotation:
- missing_annotation_count += 1
-
- logging.info('%d images are missing captions.', missing_annotation_count)
-
- return img_to_caption_annotation
-
-
-def _load_panoptic_annotations(panoptic_annotations_file):
- """Loads panoptic annotation from file."""
- with tf.io.gfile.GFile(panoptic_annotations_file, 'r') as fid:
- panoptic_annotations = json.load(fid)
-
- img_to_panoptic_annotation = dict()
- logging.info('Building panoptic index.')
- for annotation in panoptic_annotations['annotations']:
- image_id = annotation['image_id']
- img_to_panoptic_annotation[image_id] = annotation
-
- is_category_thing = dict()
- for category_info in panoptic_annotations['categories']:
- is_category_thing[category_info['id']] = category_info['isthing'] == 1
-
- missing_annotation_count = 0
- images = panoptic_annotations['images']
- for image in images:
- image_id = image['id']
- if image_id not in img_to_panoptic_annotation:
- missing_annotation_count += 1
- logging.info(
- '%d images are missing panoptic annotations.', missing_annotation_count)
-
- return img_to_panoptic_annotation, is_category_thing
-
-
-def _load_images_info(images_info_file):
- with tf.io.gfile.GFile(images_info_file, 'r') as fid:
- info_dict = json.load(fid)
- return info_dict['images']
-
-
-def generate_annotations(images, image_dirs,
- panoptic_masks_dir=None,
- img_to_obj_annotation=None,
- img_to_caption_annotation=None,
- img_to_panoptic_annotation=None,
- is_category_thing=None,
- id_to_name_map=None,
- include_panoptic_masks=False,
- include_masks=False):
- """Generator for COCO annotations."""
- for image in images:
- object_annotation = (img_to_obj_annotation.get(image['id'], None) if
- img_to_obj_annotation else None)
-
- caption_annotaion = (img_to_caption_annotation.get(image['id'], None) if
- img_to_caption_annotation else None)
-
- panoptic_annotation = (img_to_panoptic_annotation.get(image['id'], None) if
- img_to_panoptic_annotation else None)
- yield (image, image_dirs, panoptic_masks_dir, object_annotation,
- id_to_name_map, caption_annotaion, panoptic_annotation,
- is_category_thing, include_panoptic_masks, include_masks)
-
-
-def _create_tf_record_from_coco_annotations(images_info_file,
- image_dirs,
- output_path,
- num_shards,
- object_annotations_file=None,
- caption_annotations_file=None,
- panoptic_masks_dir=None,
- panoptic_annotations_file=None,
- include_panoptic_masks=False,
- include_masks=False):
- """Loads COCO annotation json files and converts to tf.Record format.
-
- Args:
- images_info_file: JSON file containing image info. The number of tf.Examples
- in the output tf Record files is exactly equal to the number of image info
- entries in this file. This can be any of train/val/test annotation json
- files Eg. 'image_info_test-dev2017.json',
- 'instance_annotations_train2017.json',
- 'caption_annotations_train2017.json', etc.
- image_dirs: List of directories containing the image files.
- output_path: Path to output tf.Record file.
- num_shards: Number of output files to create.
- object_annotations_file: JSON file containing bounding box annotations.
- caption_annotations_file: JSON file containing caption annotations.
- panoptic_masks_dir: Directory containing panoptic masks.
- panoptic_annotations_file: JSON file containing panoptic annotations.
- include_panoptic_masks: Whether to include 'category_mask'
- and 'instance_mask', which is required by the panoptic quality evaluator.
- include_masks: Whether to include instance segmentations masks
- (PNG encoded) in the result. default: False.
- """
-
- logging.info('writing to output path: %s', output_path)
-
- images = _load_images_info(images_info_file)
-
- img_to_obj_annotation = None
- img_to_caption_annotation = None
- id_to_name_map = None
- img_to_panoptic_annotation = None
- is_category_thing = None
- if object_annotations_file:
- img_to_obj_annotation, id_to_name_map = (
- _load_object_annotations(object_annotations_file))
- if caption_annotations_file:
- img_to_caption_annotation = (
- _load_caption_annotations(caption_annotations_file))
- if panoptic_annotations_file:
- img_to_panoptic_annotation, is_category_thing = (
- _load_panoptic_annotations(panoptic_annotations_file))
-
- coco_annotations_iter = generate_annotations(
- images=images,
- image_dirs=image_dirs,
- panoptic_masks_dir=panoptic_masks_dir,
- img_to_obj_annotation=img_to_obj_annotation,
- img_to_caption_annotation=img_to_caption_annotation,
- img_to_panoptic_annotation=img_to_panoptic_annotation,
- is_category_thing=is_category_thing,
- id_to_name_map=id_to_name_map,
- include_panoptic_masks=include_panoptic_masks,
- include_masks=include_masks)
-
- num_skipped = tfrecord_lib.write_tf_record_dataset(
- output_path, coco_annotations_iter, create_tf_example, num_shards)
-
- logging.info('Finished writing, skipped %d annotations.', num_skipped)
-
-
-def main(_):
- assert FLAGS.image_dir, '`image_dir` missing.'
- assert (FLAGS.image_info_file or FLAGS.object_annotations_file or
- FLAGS.caption_annotations_file), ('All annotation files are '
- 'missing.')
- if FLAGS.image_info_file:
- images_info_file = FLAGS.image_info_file
- elif FLAGS.object_annotations_file:
- images_info_file = FLAGS.object_annotations_file
- else:
- images_info_file = FLAGS.caption_annotations_file
-
- directory = os.path.dirname(FLAGS.output_file_prefix)
- if not tf.io.gfile.isdir(directory):
- tf.io.gfile.makedirs(directory)
-
- _create_tf_record_from_coco_annotations(images_info_file, FLAGS.image_dir,
- FLAGS.output_file_prefix,
- FLAGS.num_shards,
- FLAGS.object_annotations_file,
- FLAGS.caption_annotations_file,
- FLAGS.panoptic_masks_dir,
- FLAGS.panoptic_annotations_file,
- FLAGS.include_panoptic_masks,
- FLAGS.include_masks)
-
-
-if __name__ == '__main__':
- app.run(main)
diff --git a/official/vision/beta/data/process_coco_few_shot.sh b/official/vision/beta/data/process_coco_few_shot.sh
deleted file mode 100644
index 2fec6cb3f42daf95edfdeccea1ad8ab94d676e04..0000000000000000000000000000000000000000
--- a/official/vision/beta/data/process_coco_few_shot.sh
+++ /dev/null
@@ -1,70 +0,0 @@
-#!/bin/bash
-#
-# Processes the COCO few-shot benchmark into TFRecord files. Requires `wget`.
-
-tmp_dir=$(mktemp -d -t coco-XXXXXXXXXX)
-base_image_dir="/tmp/coco_images"
-output_dir="/tmp/coco_few_shot"
-while getopts ":i:o:" o; do
- case "${o}" in
- o) output_dir=${OPTARG} ;;
- i) base_image_dir=${OPTARG} ;;
- *) echo "Usage: ${0} [-i ] [-o ]" 1>&2; exit 1 ;;
- esac
-done
-
-cocosplit_url="dl.yf.io/fs-det/datasets/cocosplit"
-wget --recursive --no-parent -q --show-progress --progress=bar:force:noscroll \
- -P "${tmp_dir}" -A "trainvalno5k.json,5k.json,*1shot*.json,*3shot*.json,*5shot*.json,*10shot*.json,*30shot*.json" \
- "http://${cocosplit_url}/"
-mv "${tmp_dir}/${cocosplit_url}/"* "${tmp_dir}"
-rm -rf "${tmp_dir}/${cocosplit_url}/"
-
-python process_coco_few_shot_json_files.py \
- --logtostderr --workdir="${tmp_dir}"
-
-for seed in {0..9}; do
- for shots in 1 3 5 10 30; do
- python create_coco_tf_record.py \
- --logtostderr \
- --image_dir="${base_image_dir}/train2014" \
- --image_dir="${base_image_dir}/val2014" \
- --image_info_file="${tmp_dir}/${shots}shot_seed${seed}.json" \
- --object_annotations_file="${tmp_dir}/${shots}shot_seed${seed}.json" \
- --caption_annotations_file="" \
- --output_file_prefix="${output_dir}/${shots}shot_seed${seed}" \
- --num_shards=4
- done
-done
-
-python create_coco_tf_record.py \
- --logtostderr \
- --image_dir="${base_image_dir}/train2014" \
- --image_dir="${base_image_dir}/val2014" \
- --image_info_file="${tmp_dir}/datasplit/5k.json" \
- --object_annotations_file="${tmp_dir}/datasplit/5k.json" \
- --caption_annotations_file="" \
- --output_file_prefix="${output_dir}/5k" \
- --num_shards=10
-
-python create_coco_tf_record.py \
- --logtostderr \
- --image_dir="${base_image_dir}/train2014" \
- --image_dir="${base_image_dir}/val2014" \
- --image_info_file="${tmp_dir}/datasplit/trainvalno5k_base.json" \
- --object_annotations_file="${tmp_dir}/datasplit/trainvalno5k_base.json" \
- --caption_annotations_file="" \
- --output_file_prefix="${output_dir}/trainvalno5k_base" \
- --num_shards=200
-
-python create_coco_tf_record.py \
- --logtostderr \
- --image_dir="${base_image_dir}/train2014" \
- --image_dir="${base_image_dir}/val2014" \
- --image_info_file="${tmp_dir}/datasplit/5k_base.json" \
- --object_annotations_file="${tmp_dir}/datasplit/5k_base.json" \
- --caption_annotations_file="" \
- --output_file_prefix="${output_dir}/5k_base" \
- --num_shards=10
-
-rm -rf "${tmp_dir}"
diff --git a/official/vision/beta/data/process_coco_few_shot_json_files.py b/official/vision/beta/data/process_coco_few_shot_json_files.py
deleted file mode 100644
index 7a918c5117d3d792bb3d11e974e6d1da921caf54..0000000000000000000000000000000000000000
--- a/official/vision/beta/data/process_coco_few_shot_json_files.py
+++ /dev/null
@@ -1,144 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Processes the JSON files for COCO few-shot.
-
-We assume that `workdir` mirrors the contents of
-http://dl.yf.io/fs-det/datasets/cocosplit/, which contains the official JSON
-files for the few-shot COCO evaluation procedure that Wang et al. (2020)'s
-"Frustratingly Simple Few-Shot Object Detection" paper uses.
-"""
-
-import collections
-import itertools
-import json
-import logging
-import os
-
-from absl import app
-from absl import flags
-
-import tensorflow as tf
-
-logger = tf.get_logger()
-logger.setLevel(logging.INFO)
-
-flags.DEFINE_string('workdir', None, 'Working directory.')
-
-FLAGS = flags.FLAGS
-CATEGORIES = ['airplane', 'apple', 'backpack', 'banana', 'baseball bat',
- 'baseball glove', 'bear', 'bed', 'bench', 'bicycle', 'bird',
- 'boat', 'book', 'bottle', 'bowl', 'broccoli', 'bus', 'cake',
- 'car', 'carrot', 'cat', 'cell phone', 'chair', 'clock', 'couch',
- 'cow', 'cup', 'dining table', 'dog', 'donut', 'elephant',
- 'fire hydrant', 'fork', 'frisbee', 'giraffe', 'hair drier',
- 'handbag', 'horse', 'hot dog', 'keyboard', 'kite', 'knife',
- 'laptop', 'microwave', 'motorcycle', 'mouse', 'orange', 'oven',
- 'parking meter', 'person', 'pizza', 'potted plant',
- 'refrigerator', 'remote', 'sandwich', 'scissors', 'sheep',
- 'sink', 'skateboard', 'skis', 'snowboard', 'spoon', 'sports ball',
- 'stop sign', 'suitcase', 'surfboard', 'teddy bear',
- 'tennis racket', 'tie', 'toaster', 'toilet', 'toothbrush',
- 'traffic light', 'train', 'truck', 'tv', 'umbrella', 'vase',
- 'wine glass', 'zebra']
-SEEDS = list(range(10))
-SHOTS = [1, 3, 5, 10, 30]
-
-FILE_SUFFIXES = collections.defaultdict(list)
-for _seed, _shots in itertools.product(SEEDS, SHOTS):
- for _category in CATEGORIES:
- FILE_SUFFIXES[(_seed, _shots)].append(
- '{}full_box_{}shot_{}_trainval.json'.format(
- # http://dl.yf.io/fs-det/datasets/cocosplit/ is organized like so:
- #
- # datasplit/
- # trainvalno5k.json
- # 5k.json
- # full_box_{1,2,3,5,10,30}shot_{category}_trainval.json
- # seed{1-9}/
- # full_box_{1,2,3,5,10,30}shot_{category}_trainval.json
- #
- # This means that the JSON files for seed0 are located in the root
- # directory rather than in a `seed?/` subdirectory, hence the
- # conditional expression below.
- '' if _seed == 0 else 'seed{}/'.format(_seed),
- _shots,
- _category))
-
-# Base class IDs, as defined in
-# https://github.com/ucbdrive/few-shot-object-detection/blob/master/fsdet/evaluation/coco_evaluation.py#L60-L65
-BASE_CLASS_IDS = [8, 10, 11, 13, 14, 15, 22, 23, 24, 25, 27, 28, 31, 32, 33, 34,
- 35, 36, 37, 38, 39, 40, 41, 42, 43, 46, 47, 48, 49, 50, 51,
- 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 65, 70, 73, 74, 75,
- 76, 77, 78, 79, 80, 81, 82, 84, 85, 86, 87, 88, 89, 90]
-
-
-def main(unused_argv):
- workdir = FLAGS.workdir
-
- # Filter novel class annotations from the training and validation sets.
- for name in ('trainvalno5k', '5k'):
- file_path = os.path.join(workdir, 'datasplit', '{}.json'.format(name))
- with tf.io.gfile.GFile(file_path, 'r') as f:
- json_dict = json.load(f)
-
- json_dict['annotations'] = [a for a in json_dict['annotations']
- if a['category_id'] in BASE_CLASS_IDS]
- output_path = os.path.join(
- workdir, 'datasplit', '{}_base.json'.format(name))
- with tf.io.gfile.GFile(output_path, 'w') as f:
- json.dump(json_dict, f)
-
- for seed, shots in itertools.product(SEEDS, SHOTS):
- # Retrieve all examples for a given seed and shots setting.
- file_paths = [os.path.join(workdir, suffix)
- for suffix in FILE_SUFFIXES[(seed, shots)]]
- json_dicts = []
- for file_path in file_paths:
- with tf.io.gfile.GFile(file_path, 'r') as f:
- json_dicts.append(json.load(f))
-
- # Make sure that all JSON files for a given seed and shots setting have the
- # same metadata. We count on this to fuse them later on.
- metadata_dicts = [{'info': d['info'], 'licenses': d['licenses'],
- 'categories': d['categories']} for d in json_dicts]
- if not all(d == metadata_dicts[0] for d in metadata_dicts[1:]):
- raise RuntimeError(
- 'JSON files for {} shots (seed {}) '.format(shots, seed) +
- 'have different info, licences, or categories fields')
-
- # Retrieve images across all JSON files.
- images = sum((d['images'] for d in json_dicts), [])
- # Remove duplicate image entries.
- images = list({image['id']: image for image in images}.values())
-
- output_dict = {
- 'info': json_dicts[0]['info'],
- 'licenses': json_dicts[0]['licenses'],
- 'categories': json_dicts[0]['categories'],
- 'images': images,
- 'annotations': sum((d['annotations'] for d in json_dicts), [])
- }
-
- output_path = os.path.join(workdir,
- '{}shot_seed{}.json'.format(shots, seed))
- with tf.io.gfile.GFile(output_path, 'w') as f:
- json.dump(output_dict, f)
- logger.info('Processed %d shots (seed %d) and saved to %s',
- shots, seed, output_path)
-
-
-if __name__ == '__main__':
- flags.mark_flag_as_required('workdir')
- app.run(main)
diff --git a/official/vision/beta/data/process_coco_panoptic.sh b/official/vision/beta/data/process_coco_panoptic.sh
deleted file mode 100644
index fd70039741e9af6972aaf959e589feb2ab0fca75..0000000000000000000000000000000000000000
--- a/official/vision/beta/data/process_coco_panoptic.sh
+++ /dev/null
@@ -1,40 +0,0 @@
-#!/bin/bash
-
-sudo apt update
-sudo apt install unzip aria2 -y
-
-DATA_DIR=$1
-aria2c -j 8 -Z \
- http://images.cocodataset.org/annotations/annotations_trainval2017.zip \
- http://images.cocodataset.org/annotations/panoptic_annotations_trainval2017.zip \
- http://images.cocodataset.org/zips/train2017.zip \
- http://images.cocodataset.org/zips/val2017.zip \
- --dir=$DATA_DIR;
-
-unzip $DATA_DIR/"*".zip -d $DATA_DIR;
-mkdir $DATA_DIR/zips && mv $DATA_DIR/*.zip $DATA_DIR/zips;
-unzip $DATA_DIR/annotations/panoptic_train2017.zip -d $DATA_DIR
-unzip $DATA_DIR/annotations/panoptic_val2017.zip -d $DATA_DIR
-
-python3 official/vision/beta/data/create_coco_tf_record.py \
- --logtostderr \
- --image_dir="$DATA_DIR/val2017" \
- --object_annotations_file="$DATA_DIR/annotations/instances_val2017.json" \
- --output_file_prefix="$DATA_DIR/tfrecords/val" \
- --panoptic_annotations_file="$DATA_DIR/annotations/panoptic_val2017.json" \
- --panoptic_masks_dir="$DATA_DIR/panoptic_val2017" \
- --num_shards=8 \
- --include_masks \
- --include_panoptic_masks
-
-
-python3 official/vision/beta/data/create_coco_tf_record.py \
- --logtostderr \
- --image_dir="$DATA_DIR/train2017" \
- --object_annotations_file="$DATA_DIR/annotations/instances_train2017.json" \
- --output_file_prefix="$DATA_DIR/tfrecords/train" \
- --panoptic_annotations_file="$DATA_DIR/annotations/panoptic_train2017.json" \
- --panoptic_masks_dir="$DATA_DIR/panoptic_train2017" \
- --num_shards=32 \
- --include_masks \
- --include_panoptic_masks
diff --git a/official/vision/beta/data/tfrecord_lib.py b/official/vision/beta/data/tfrecord_lib.py
deleted file mode 100644
index c91b2edadb2dc25e327340710ccb1eb571a0d45a..0000000000000000000000000000000000000000
--- a/official/vision/beta/data/tfrecord_lib.py
+++ /dev/null
@@ -1,181 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Helper functions for creating TFRecord datasets."""
-
-import hashlib
-import io
-import itertools
-
-from absl import logging
-import numpy as np
-from PIL import Image
-import tensorflow as tf
-
-import multiprocessing as mp
-
-
-def convert_to_feature(value, value_type=None):
- """Converts the given python object to a tf.train.Feature.
-
- Args:
- value: int, float, bytes or a list of them.
- value_type: optional, if specified, forces the feature to be of the given
- type. Otherwise, type is inferred automatically. Can be one of
- ['bytes', 'int64', 'float', 'bytes_list', 'int64_list', 'float_list']
-
- Returns:
- feature: A tf.train.Feature object.
- """
-
- if value_type is None:
-
- element = value[0] if isinstance(value, list) else value
-
- if isinstance(element, bytes):
- value_type = 'bytes'
-
- elif isinstance(element, (int, np.integer)):
- value_type = 'int64'
-
- elif isinstance(element, (float, np.floating)):
- value_type = 'float'
-
- else:
- raise ValueError('Cannot convert type {} to feature'.
- format(type(element)))
-
- if isinstance(value, list):
- value_type = value_type + '_list'
-
- if value_type == 'int64':
- return tf.train.Feature(int64_list=tf.train.Int64List(value=[value]))
-
- elif value_type == 'int64_list':
- value = np.asarray(value).astype(np.int64).reshape(-1)
- return tf.train.Feature(int64_list=tf.train.Int64List(value=value))
-
- elif value_type == 'float':
- return tf.train.Feature(float_list=tf.train.FloatList(value=[value]))
-
- elif value_type == 'float_list':
- value = np.asarray(value).astype(np.float32).reshape(-1)
- return tf.train.Feature(float_list=tf.train.FloatList(value=value))
-
- elif value_type == 'bytes':
- return tf.train.Feature(bytes_list=tf.train.BytesList(value=[value]))
-
- elif value_type == 'bytes_list':
- return tf.train.Feature(bytes_list=tf.train.BytesList(value=value))
-
- else:
- raise ValueError('Unknown value_type parameter - {}'.format(value_type))
-
-
-def image_info_to_feature_dict(height, width, filename, image_id,
- encoded_str, encoded_format):
- """Convert image information to a dict of features."""
-
- key = hashlib.sha256(encoded_str).hexdigest()
-
- return {
- 'image/height': convert_to_feature(height),
- 'image/width': convert_to_feature(width),
- 'image/filename': convert_to_feature(filename.encode('utf8')),
- 'image/source_id': convert_to_feature(str(image_id).encode('utf8')),
- 'image/key/sha256': convert_to_feature(key.encode('utf8')),
- 'image/encoded': convert_to_feature(encoded_str),
- 'image/format': convert_to_feature(encoded_format.encode('utf8')),
- }
-
-
-def read_image(image_path):
- pil_image = Image.open(image_path)
- return np.asarray(pil_image)
-
-
-def encode_mask_as_png(mask):
- pil_image = Image.fromarray(mask)
- output_io = io.BytesIO()
- pil_image.save(output_io, format='PNG')
- return output_io.getvalue()
-
-
-def write_tf_record_dataset(output_path, annotation_iterator,
- process_func, num_shards,
- use_multiprocessing=True, unpack_arguments=True):
- """Iterates over annotations, processes them and writes into TFRecords.
-
- Args:
- output_path: The prefix path to create TF record files.
- annotation_iterator: An iterator of tuples containing details about the
- dataset.
- process_func: A function which takes the elements from the tuples of
- annotation_iterator as arguments and returns a tuple of (tf.train.Example,
- int). The integer indicates the number of annotations that were skipped.
- num_shards: int, the number of shards to write for the dataset.
- use_multiprocessing:
- Whether or not to use multiple processes to write TF Records.
- unpack_arguments:
- Whether to unpack the tuples from annotation_iterator as individual
- arguments to the process func or to pass the returned value as it is.
-
- Returns:
- num_skipped: The total number of skipped annotations.
- """
-
- writers = [
- tf.io.TFRecordWriter(
- output_path + '-%05d-of-%05d.tfrecord' % (i, num_shards))
- for i in range(num_shards)
- ]
-
- total_num_annotations_skipped = 0
-
- if use_multiprocessing:
- pool = mp.Pool()
- if unpack_arguments:
- tf_example_iterator = pool.starmap(process_func, annotation_iterator)
- else:
- tf_example_iterator = pool.imap(process_func, annotation_iterator)
- else:
- if unpack_arguments:
- tf_example_iterator = itertools.starmap(process_func, annotation_iterator)
- else:
- tf_example_iterator = map(process_func, annotation_iterator)
-
- for idx, (tf_example, num_annotations_skipped) in enumerate(
- tf_example_iterator):
- if idx % 100 == 0:
- logging.info('On image %d', idx)
-
- total_num_annotations_skipped += num_annotations_skipped
- writers[idx % num_shards].write(tf_example.SerializeToString())
-
- if use_multiprocessing:
- pool.close()
- pool.join()
-
- for writer in writers:
- writer.close()
-
- logging.info('Finished writing, skipped %d annotations.',
- total_num_annotations_skipped)
- return total_num_annotations_skipped
-
-
-def check_and_make_dir(directory):
- """Creates the directory if it doesn't exist."""
- if not tf.io.gfile.isdir(directory):
- tf.io.gfile.makedirs(directory)
diff --git a/official/vision/beta/data/tfrecord_lib_test.py b/official/vision/beta/data/tfrecord_lib_test.py
deleted file mode 100644
index f6be438cf81dc96313ac5f9c6ec7e70fac0baa51..0000000000000000000000000000000000000000
--- a/official/vision/beta/data/tfrecord_lib_test.py
+++ /dev/null
@@ -1,93 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for tfrecord_lib."""
-
-import os
-
-from absl import flags
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.vision.beta.data import tfrecord_lib
-
-
-FLAGS = flags.FLAGS
-
-
-def process_sample(x):
- d = {'x': x}
- return tf.train.Example(features=tf.train.Features(feature=d)), 0
-
-
-def parse_function(example_proto):
-
- feature_description = {
- 'x': tf.io.FixedLenFeature([], tf.int64, default_value=-1)
- }
- return tf.io.parse_single_example(example_proto, feature_description)
-
-
-class TfrecordLibTest(parameterized.TestCase):
-
- def test_write_tf_record_dataset(self):
- data = [(tfrecord_lib.convert_to_feature(i),) for i in range(17)]
-
- path = os.path.join(FLAGS.test_tmpdir, 'train')
-
- tfrecord_lib.write_tf_record_dataset(
- path, data, process_sample, 3, use_multiprocessing=False)
- tfrecord_files = tf.io.gfile.glob(path + '*')
-
- self.assertLen(tfrecord_files, 3)
-
- dataset = tf.data.TFRecordDataset(tfrecord_files)
- dataset = dataset.map(parse_function)
-
- read_values = set(d['x'] for d in dataset.as_numpy_iterator())
- self.assertSetEqual(read_values, set(range(17)))
-
- def test_convert_to_feature_float(self):
-
- proto = tfrecord_lib.convert_to_feature(0.0)
- self.assertEqual(proto.float_list.value[0], 0.0)
-
- def test_convert_to_feature_int(self):
-
- proto = tfrecord_lib.convert_to_feature(0)
- self.assertEqual(proto.int64_list.value[0], 0)
-
- def test_convert_to_feature_bytes(self):
-
- proto = tfrecord_lib.convert_to_feature(b'123')
- self.assertEqual(proto.bytes_list.value[0], b'123')
-
- def test_convert_to_feature_float_list(self):
-
- proto = tfrecord_lib.convert_to_feature([0.0, 1.0])
- self.assertSequenceAlmostEqual(proto.float_list.value, [0.0, 1.0])
-
- def test_convert_to_feature_int_list(self):
-
- proto = tfrecord_lib.convert_to_feature([0, 1])
- self.assertSequenceAlmostEqual(proto.int64_list.value, [0, 1])
-
- def test_convert_to_feature_bytes_list(self):
-
- proto = tfrecord_lib.convert_to_feature([b'123', b'456'])
- self.assertSequenceAlmostEqual(proto.bytes_list.value, [b'123', b'456'])
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/dataloaders/__init__.py b/official/vision/beta/dataloaders/__init__.py
deleted file mode 100644
index 310bfb28f0c252bc4a4485325059bff28c5250c2..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/__init__.py
+++ /dev/null
@@ -1,14 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
diff --git a/official/vision/beta/dataloaders/classification_input.py b/official/vision/beta/dataloaders/classification_input.py
deleted file mode 100644
index 7bfae3ef5dfc31d977c93c2ff1385e1cfc1d5353..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/classification_input.py
+++ /dev/null
@@ -1,273 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Classification decoder and parser."""
-from typing import Any, Dict, List, Optional
-# Import libraries
-import tensorflow as tf
-
-from official.vision.beta.configs import common
-from official.vision.beta.dataloaders import decoder
-from official.vision.beta.dataloaders import parser
-from official.vision.beta.ops import augment
-from official.vision.beta.ops import preprocess_ops
-
-MEAN_RGB = (0.485 * 255, 0.456 * 255, 0.406 * 255)
-STDDEV_RGB = (0.229 * 255, 0.224 * 255, 0.225 * 255)
-
-DEFAULT_IMAGE_FIELD_KEY = 'image/encoded'
-DEFAULT_LABEL_FIELD_KEY = 'image/class/label'
-
-
-class Decoder(decoder.Decoder):
- """A tf.Example decoder for classification task."""
-
- def __init__(self,
- image_field_key: str = DEFAULT_IMAGE_FIELD_KEY,
- label_field_key: str = DEFAULT_LABEL_FIELD_KEY,
- is_multilabel: bool = False,
- keys_to_features: Optional[Dict[str, Any]] = None):
- if not keys_to_features:
- keys_to_features = {
- image_field_key:
- tf.io.FixedLenFeature((), tf.string, default_value=''),
- }
- if is_multilabel:
- keys_to_features.update(
- {label_field_key: tf.io.VarLenFeature(dtype=tf.int64)})
- else:
- keys_to_features.update({
- label_field_key:
- tf.io.FixedLenFeature((), tf.int64, default_value=-1)
- })
- self._keys_to_features = keys_to_features
-
- def decode(self, serialized_example):
- return tf.io.parse_single_example(
- serialized_example, self._keys_to_features)
-
-
-class Parser(parser.Parser):
- """Parser to parse an image and its annotations into a dictionary of tensors."""
-
- def __init__(self,
- output_size: List[int],
- num_classes: float,
- image_field_key: str = DEFAULT_IMAGE_FIELD_KEY,
- label_field_key: str = DEFAULT_LABEL_FIELD_KEY,
- decode_jpeg_only: bool = True,
- aug_rand_hflip: bool = True,
- aug_type: Optional[common.Augmentation] = None,
- color_jitter: float = 0.,
- random_erasing: Optional[common.RandomErasing] = None,
- is_multilabel: bool = False,
- dtype: str = 'float32'):
- """Initializes parameters for parsing annotations in the dataset.
-
- Args:
- output_size: `Tensor` or `list` for [height, width] of output image. The
- output_size should be divided by the largest feature stride 2^max_level.
- num_classes: `float`, number of classes.
- image_field_key: `str`, the key name to encoded image in tf.Example.
- label_field_key: `str`, the key name to label in tf.Example.
- decode_jpeg_only: `bool`, if True, only JPEG format is decoded, this is
- faster than decoding other types. Default is True.
- aug_rand_hflip: `bool`, if True, augment training with random
- horizontal flip.
- aug_type: An optional Augmentation object to choose from AutoAugment and
- RandAugment.
- color_jitter: Magnitude of color jitter. If > 0, the value is used to
- generate random scale factor for brightness, contrast and saturation.
- See `preprocess_ops.color_jitter` for more details.
- random_erasing: if not None, augment input image by random erasing. See
- `augment.RandomErasing` for more details.
- is_multilabel: A `bool`, whether or not each example has multiple labels.
- dtype: `str`, cast output image in dtype. It can be 'float32', 'float16',
- or 'bfloat16'.
- """
- self._output_size = output_size
- self._aug_rand_hflip = aug_rand_hflip
- self._num_classes = num_classes
- self._image_field_key = image_field_key
- if dtype == 'float32':
- self._dtype = tf.float32
- elif dtype == 'float16':
- self._dtype = tf.float16
- elif dtype == 'bfloat16':
- self._dtype = tf.bfloat16
- else:
- raise ValueError('dtype {!r} is not supported!'.format(dtype))
- if aug_type:
- if aug_type.type == 'autoaug':
- self._augmenter = augment.AutoAugment(
- augmentation_name=aug_type.autoaug.augmentation_name,
- cutout_const=aug_type.autoaug.cutout_const,
- translate_const=aug_type.autoaug.translate_const)
- elif aug_type.type == 'randaug':
- self._augmenter = augment.RandAugment(
- num_layers=aug_type.randaug.num_layers,
- magnitude=aug_type.randaug.magnitude,
- cutout_const=aug_type.randaug.cutout_const,
- translate_const=aug_type.randaug.translate_const,
- prob_to_apply=aug_type.randaug.prob_to_apply,
- exclude_ops=aug_type.randaug.exclude_ops)
- else:
- raise ValueError('Augmentation policy {} not supported.'.format(
- aug_type.type))
- else:
- self._augmenter = None
- self._label_field_key = label_field_key
- self._color_jitter = color_jitter
- if random_erasing:
- self._random_erasing = augment.RandomErasing(
- probability=random_erasing.probability,
- min_area=random_erasing.min_area,
- max_area=random_erasing.max_area,
- min_aspect=random_erasing.min_aspect,
- max_aspect=random_erasing.max_aspect,
- min_count=random_erasing.min_count,
- max_count=random_erasing.max_count,
- trials=random_erasing.trials)
- else:
- self._random_erasing = None
- self._is_multilabel = is_multilabel
- self._decode_jpeg_only = decode_jpeg_only
-
- def _parse_train_data(self, decoded_tensors):
- """Parses data for training."""
- image = self._parse_train_image(decoded_tensors)
- label = tf.cast(decoded_tensors[self._label_field_key], dtype=tf.int32)
- if self._is_multilabel:
- if isinstance(label, tf.sparse.SparseTensor):
- label = tf.sparse.to_dense(label)
- label = tf.reduce_sum(tf.one_hot(label, self._num_classes), axis=0)
- return image, label
-
- def _parse_eval_data(self, decoded_tensors):
- """Parses data for evaluation."""
- image = self._parse_eval_image(decoded_tensors)
- label = tf.cast(decoded_tensors[self._label_field_key], dtype=tf.int32)
- if self._is_multilabel:
- if isinstance(label, tf.sparse.SparseTensor):
- label = tf.sparse.to_dense(label)
- label = tf.reduce_sum(tf.one_hot(label, self._num_classes), axis=0)
- return image, label
-
- def _parse_train_image(self, decoded_tensors):
- """Parses image data for training."""
- image_bytes = decoded_tensors[self._image_field_key]
-
- if self._decode_jpeg_only:
- image_shape = tf.image.extract_jpeg_shape(image_bytes)
-
- # Crops image.
- cropped_image = preprocess_ops.random_crop_image_v2(
- image_bytes, image_shape)
- image = tf.cond(
- tf.reduce_all(tf.equal(tf.shape(cropped_image), image_shape)),
- lambda: preprocess_ops.center_crop_image_v2(image_bytes, image_shape),
- lambda: cropped_image)
- else:
- # Decodes image.
- image = tf.io.decode_image(image_bytes, channels=3)
- image.set_shape([None, None, 3])
-
- # Crops image.
- cropped_image = preprocess_ops.random_crop_image(image)
-
- image = tf.cond(
- tf.reduce_all(tf.equal(tf.shape(cropped_image), tf.shape(image))),
- lambda: preprocess_ops.center_crop_image(image),
- lambda: cropped_image)
-
- if self._aug_rand_hflip:
- image = tf.image.random_flip_left_right(image)
-
- # Color jitter.
- if self._color_jitter > 0:
- image = preprocess_ops.color_jitter(image, self._color_jitter,
- self._color_jitter,
- self._color_jitter)
-
- # Resizes image.
- image = tf.image.resize(
- image, self._output_size, method=tf.image.ResizeMethod.BILINEAR)
- image.set_shape([self._output_size[0], self._output_size[1], 3])
-
- # Apply autoaug or randaug.
- if self._augmenter is not None:
- image = self._augmenter.distort(image)
-
- # Normalizes image with mean and std pixel values.
- image = preprocess_ops.normalize_image(image,
- offset=MEAN_RGB,
- scale=STDDEV_RGB)
-
- # Random erasing after the image has been normalized
- if self._random_erasing is not None:
- image = self._random_erasing.distort(image)
-
- # Convert image to self._dtype.
- image = tf.image.convert_image_dtype(image, self._dtype)
-
- return image
-
- def _parse_eval_image(self, decoded_tensors):
- """Parses image data for evaluation."""
- image_bytes = decoded_tensors[self._image_field_key]
-
- if self._decode_jpeg_only:
- image_shape = tf.image.extract_jpeg_shape(image_bytes)
-
- # Center crops.
- image = preprocess_ops.center_crop_image_v2(image_bytes, image_shape)
- else:
- # Decodes image.
- image = tf.io.decode_image(image_bytes, channels=3)
- image.set_shape([None, None, 3])
-
- # Center crops.
- image = preprocess_ops.center_crop_image(image)
-
- image = tf.image.resize(
- image, self._output_size, method=tf.image.ResizeMethod.BILINEAR)
- image.set_shape([self._output_size[0], self._output_size[1], 3])
-
- # Normalizes image with mean and std pixel values.
- image = preprocess_ops.normalize_image(image,
- offset=MEAN_RGB,
- scale=STDDEV_RGB)
-
- # Convert image to self._dtype.
- image = tf.image.convert_image_dtype(image, self._dtype)
-
- return image
-
- @classmethod
- def inference_fn(cls,
- image: tf.Tensor,
- input_image_size: List[int],
- num_channels: int = 3) -> tf.Tensor:
- """Builds image model inputs for serving."""
-
- image = tf.cast(image, dtype=tf.float32)
- image = preprocess_ops.center_crop_image(image)
- image = tf.image.resize(
- image, input_image_size, method=tf.image.ResizeMethod.BILINEAR)
-
- # Normalizes image with mean and std pixel values.
- image = preprocess_ops.normalize_image(
- image, offset=MEAN_RGB, scale=STDDEV_RGB)
- image.set_shape(input_image_size + [num_channels])
- return image
diff --git a/official/vision/beta/dataloaders/decoder.py b/official/vision/beta/dataloaders/decoder.py
deleted file mode 100644
index 821083f0f0993ae67518b9fcf45c34f73e552fac..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/decoder.py
+++ /dev/null
@@ -1,35 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""The generic decoder interface."""
-
-import abc
-
-
-class Decoder(object):
- """Decodes the raw data into tensors."""
-
- __metaclass__ = abc.ABCMeta
-
- @abc.abstractmethod
- def decode(self, serialized_example):
- """Decodes the serialized example into tensors.
-
- Args:
- serialized_example: a serialized string tensor that encodes the data.
-
- Returns:
- decoded_tensors: a dict of Tensors.
- """
- pass
diff --git a/official/vision/beta/dataloaders/input_reader.py b/official/vision/beta/dataloaders/input_reader.py
deleted file mode 100644
index a7cd220f127d5b9eddaf2ddc6115ffb132c54d69..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/input_reader.py
+++ /dev/null
@@ -1,179 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Dataset reader for vision model garden."""
-
-from typing import Any, Callable, Optional, Tuple
-
-import tensorflow as tf
-
-from official.core import config_definitions as cfg
-from official.core import input_reader
-
-
-def calculate_batch_sizes(total_batch_size: int,
- pseudo_label_ratio: float) -> Tuple[int, int]:
- """Calculates labeled and pseudo-labeled dataset batch sizes.
-
- Returns (labeled_batch_size, pseudo_labeled_batch_size) given a
- total batch size and pseudo-label data ratio.
-
- Args:
- total_batch_size: The total batch size for all data.
- pseudo_label_ratio: A non-negative float ratio of pseudo-labeled
- to labeled data in a batch.
-
- Returns:
- (labeled_batch_size, pseudo_labeled_batch_size) as ints.
-
- Raises:
- ValueError: If total_batch_size is negative.
- ValueError: If pseudo_label_ratio is negative.
- """
- if total_batch_size < 0:
- raise ValueError('Invalid total_batch_size: {}'.format(total_batch_size))
- if pseudo_label_ratio < 0.0:
- raise ValueError(
- 'Invalid pseudo_label_ratio: {}'.format(pseudo_label_ratio))
-
- ratio_factor = pseudo_label_ratio / (1.0 + pseudo_label_ratio)
- pseudo_labeled_batch_size = int(round(total_batch_size * ratio_factor))
- labeled_batch_size = total_batch_size - pseudo_labeled_batch_size
- return labeled_batch_size, pseudo_labeled_batch_size
-
-
-class CombinationDatasetInputReader(input_reader.InputReader):
- """Combination dataset input reader."""
-
- def __init__(self,
- params: cfg.DataConfig,
- dataset_fn=tf.data.TFRecordDataset,
- pseudo_label_dataset_fn=tf.data.TFRecordDataset,
- decoder_fn: Optional[Callable[..., Any]] = None,
- sample_fn: Optional[Callable[..., Any]] = None,
- parser_fn: Optional[Callable[..., Any]] = None,
- transform_and_batch_fn: Optional[Callable[
- [tf.data.Dataset, Optional[tf.distribute.InputContext]],
- tf.data.Dataset]] = None,
- postprocess_fn: Optional[Callable[..., Any]] = None):
- """Initializes an CombinationDatasetInputReader instance.
-
- This class mixes a labeled and pseudo-labeled dataset. The params
- must contain "pseudo_label_data.input_path" to specify the
- pseudo-label dataset files and "pseudo_label_data.data_ratio"
- to specify a per-batch mixing ratio of pseudo-label examples to
- labeled dataset examples.
-
- Args:
- params: A config_definitions.DataConfig object.
- dataset_fn: A `tf.data.Dataset` that consumes the input files. For
- example, it can be `tf.data.TFRecordDataset`.
- pseudo_label_dataset_fn: A `tf.data.Dataset` that consumes the input
- files. For example, it can be `tf.data.TFRecordDataset`.
- decoder_fn: An optional `callable` that takes the serialized data string
- and decodes them into the raw tensor dictionary.
- sample_fn: An optional `callable` that takes a `tf.data.Dataset` object as
- input and outputs the transformed dataset. It performs sampling on the
- decoded raw tensors dict before the parser_fn.
- parser_fn: An optional `callable` that takes the decoded raw tensors dict
- and parse them into a dictionary of tensors that can be consumed by the
- model. It will be executed after decoder_fn.
- transform_and_batch_fn: An optional `callable` that takes a
- `tf.data.Dataset` object and an optional `tf.distribute.InputContext` as
- input, and returns a `tf.data.Dataset` object. It will be executed after
- `parser_fn` to transform and batch the dataset; if None, after
- `parser_fn` is executed, the dataset will be batched into per-replica
- batch size.
- postprocess_fn: A optional `callable` that processes batched tensors. It
- will be executed after batching.
-
- Raises:
- ValueError: If drop_remainder is False.
- """
- super().__init__(params=params,
- dataset_fn=dataset_fn,
- decoder_fn=decoder_fn,
- sample_fn=sample_fn,
- parser_fn=parser_fn,
- transform_and_batch_fn=transform_and_batch_fn,
- postprocess_fn=postprocess_fn)
-
- self._pseudo_label_file_pattern = params.pseudo_label_data.input_path
- self._pseudo_label_dataset_fn = pseudo_label_dataset_fn
- self._pseudo_label_data_ratio = params.pseudo_label_data.data_ratio
- self._pseudo_label_matched_files = input_reader.match_files(
- self._pseudo_label_file_pattern)
- if not self._drop_remainder:
- raise ValueError(
- 'Must use drop_remainder=True with CombinationDatasetInputReader')
-
- def read(
- self,
- input_context: Optional[tf.distribute.InputContext] = None
- ) -> tf.data.Dataset:
- """Generates a tf.data.Dataset object."""
-
- labeled_batch_size, pl_batch_size = calculate_batch_sizes(
- self._global_batch_size, self._pseudo_label_data_ratio)
-
- if not labeled_batch_size and pl_batch_size:
- raise ValueError(
- 'Invalid batch_size: {} and pseudo_label_data_ratio: {}, '
- 'resulting in a 0 batch size for one of the datasets.'.format(
- self._global_batch_size, self._pseudo_label_data_ratio))
-
- def _read_decode_and_parse_dataset(matched_files, dataset_fn, batch_size,
- input_context, tfds_builder):
- dataset = self._read_data_source(matched_files, dataset_fn, input_context,
- tfds_builder)
- return self._decode_and_parse_dataset(dataset, batch_size, input_context)
-
- labeled_dataset = _read_decode_and_parse_dataset(
- matched_files=self._matched_files,
- dataset_fn=self._dataset_fn,
- batch_size=labeled_batch_size,
- input_context=input_context,
- tfds_builder=self._tfds_builder)
-
- pseudo_labeled_dataset = _read_decode_and_parse_dataset(
- matched_files=self._pseudo_label_matched_files,
- dataset_fn=self._pseudo_label_dataset_fn,
- batch_size=pl_batch_size,
- input_context=input_context,
- tfds_builder=False)
-
- def concat_fn(d1, d2):
- return tf.nest.map_structure(
- lambda x1, x2: tf.concat([x1, x2], axis=0), d1, d2)
-
- dataset_concat = tf.data.Dataset.zip(
- (labeled_dataset, pseudo_labeled_dataset))
- dataset_concat = dataset_concat.map(
- concat_fn, num_parallel_calls=tf.data.experimental.AUTOTUNE)
-
- def maybe_map_fn(dataset, fn):
- return dataset if fn is None else dataset.map(
- fn, num_parallel_calls=tf.data.experimental.AUTOTUNE)
-
- dataset_concat = maybe_map_fn(dataset_concat, self._postprocess_fn)
- dataset_concat = self._maybe_apply_data_service(dataset_concat,
- input_context)
-
- if self._deterministic is not None:
- options = tf.data.Options()
- options.experimental_deterministic = self._deterministic
- dataset_concat = dataset_concat.with_options(options)
-
- return dataset_concat.prefetch(tf.data.experimental.AUTOTUNE)
diff --git a/official/vision/beta/dataloaders/input_reader_factory.py b/official/vision/beta/dataloaders/input_reader_factory.py
deleted file mode 100644
index c73ce2c6525a6e8aad015d3683a0ffd70c59bc39..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/input_reader_factory.py
+++ /dev/null
@@ -1,44 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Factory for getting TF-Vision input readers."""
-
-from official.common import dataset_fn as dataset_fn_util
-from official.core import config_definitions as cfg
-from official.core import input_reader as core_input_reader
-
-from official.vision.beta.dataloaders import input_reader as vision_input_reader
-
-
-def input_reader_generator(params: cfg.DataConfig,
- **kwargs) -> core_input_reader.InputReader:
- """Instantiates an input reader class according to the params.
-
- Args:
- params: A config_definitions.DataConfig object.
- **kwargs: Additional arguments passed to input reader initialization.
-
- Returns:
- An InputReader object.
-
- """
- if params.is_training and params.get('pseudo_label_data', False):
- return vision_input_reader.CombinationDatasetInputReader(
- params,
- pseudo_label_dataset_fn=dataset_fn_util.pick_dataset_fn(
- params.pseudo_label_data.file_type),
- **kwargs)
- else:
- return core_input_reader.InputReader(params, **kwargs)
diff --git a/official/vision/beta/dataloaders/maskrcnn_input.py b/official/vision/beta/dataloaders/maskrcnn_input.py
deleted file mode 100644
index 62e4ed357ed1d0f8c54ccc3783765eef708709eb..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/maskrcnn_input.py
+++ /dev/null
@@ -1,345 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Data parser and processing for Mask R-CNN."""
-
-# Import libraries
-
-import tensorflow as tf
-
-from official.vision.beta.dataloaders import parser
-from official.vision.beta.dataloaders import utils
-from official.vision.beta.ops import anchor
-from official.vision.beta.ops import box_ops
-from official.vision.beta.ops import preprocess_ops
-
-
-class Parser(parser.Parser):
- """Parser to parse an image and its annotations into a dictionary of tensors."""
-
- def __init__(self,
- output_size,
- min_level,
- max_level,
- num_scales,
- aspect_ratios,
- anchor_size,
- rpn_match_threshold=0.7,
- rpn_unmatched_threshold=0.3,
- rpn_batch_size_per_im=256,
- rpn_fg_fraction=0.5,
- aug_rand_hflip=False,
- aug_scale_min=1.0,
- aug_scale_max=1.0,
- skip_crowd_during_training=True,
- max_num_instances=100,
- include_mask=False,
- mask_crop_size=112,
- dtype='float32'):
- """Initializes parameters for parsing annotations in the dataset.
-
- Args:
- output_size: `Tensor` or `list` for [height, width] of output image. The
- output_size should be divided by the largest feature stride 2^max_level.
- min_level: `int` number of minimum level of the output feature pyramid.
- max_level: `int` number of maximum level of the output feature pyramid.
- num_scales: `int` number representing intermediate scales added
- on each level. For instances, num_scales=2 adds one additional
- intermediate anchor scales [2^0, 2^0.5] on each level.
- aspect_ratios: `list` of float numbers representing the aspect raito
- anchors added on each level. The number indicates the ratio of width to
- height. For instances, aspect_ratios=[1.0, 2.0, 0.5] adds three anchors
- on each scale level.
- anchor_size: `float` number representing the scale of size of the base
- anchor to the feature stride 2^level.
- rpn_match_threshold:
- rpn_unmatched_threshold:
- rpn_batch_size_per_im:
- rpn_fg_fraction:
- aug_rand_hflip: `bool`, if True, augment training with random
- horizontal flip.
- aug_scale_min: `float`, the minimum scale applied to `output_size` for
- data augmentation during training.
- aug_scale_max: `float`, the maximum scale applied to `output_size` for
- data augmentation during training.
- skip_crowd_during_training: `bool`, if True, skip annotations labeled with
- `is_crowd` equals to 1.
- max_num_instances: `int` number of maximum number of instances in an
- image. The groundtruth data will be padded to `max_num_instances`.
- include_mask: a bool to indicate whether parse mask groundtruth.
- mask_crop_size: the size which groundtruth mask is cropped to.
- dtype: `str`, data type. One of {`bfloat16`, `float32`, `float16`}.
- """
-
- self._max_num_instances = max_num_instances
- self._skip_crowd_during_training = skip_crowd_during_training
-
- # Anchor.
- self._output_size = output_size
- self._min_level = min_level
- self._max_level = max_level
- self._num_scales = num_scales
- self._aspect_ratios = aspect_ratios
- self._anchor_size = anchor_size
-
- # Target assigning.
- self._rpn_match_threshold = rpn_match_threshold
- self._rpn_unmatched_threshold = rpn_unmatched_threshold
- self._rpn_batch_size_per_im = rpn_batch_size_per_im
- self._rpn_fg_fraction = rpn_fg_fraction
-
- # Data augmentation.
- self._aug_rand_hflip = aug_rand_hflip
- self._aug_scale_min = aug_scale_min
- self._aug_scale_max = aug_scale_max
-
- # Mask.
- self._include_mask = include_mask
- self._mask_crop_size = mask_crop_size
-
- # Image output dtype.
- self._dtype = dtype
-
- def _parse_train_data(self, data):
- """Parses data for training.
-
- Args:
- data: the decoded tensor dictionary from TfExampleDecoder.
-
- Returns:
- image: image tensor that is preproessed to have normalized value and
- dimension [output_size[0], output_size[1], 3]
- labels: a dictionary of tensors used for training. The following describes
- {key: value} pairs in the dictionary.
- image_info: a 2D `Tensor` that encodes the information of the image and
- the applied preprocessing. It is in the format of
- [[original_height, original_width], [scaled_height, scaled_width],
- anchor_boxes: ordered dictionary with keys
- [min_level, min_level+1, ..., max_level]. The values are tensor with
- shape [height_l, width_l, 4] representing anchor boxes at each level.
- rpn_score_targets: ordered dictionary with keys
- [min_level, min_level+1, ..., max_level]. The values are tensor with
- shape [height_l, width_l, anchors_per_location]. The height_l and
- width_l represent the dimension of class logits at l-th level.
- rpn_box_targets: ordered dictionary with keys
- [min_level, min_level+1, ..., max_level]. The values are tensor with
- shape [height_l, width_l, anchors_per_location * 4]. The height_l and
- width_l represent the dimension of bounding box regression output at
- l-th level.
- gt_boxes: Groundtruth bounding box annotations. The box is represented
- in [y1, x1, y2, x2] format. The coordinates are w.r.t the scaled
- image that is fed to the network. The tennsor is padded with -1 to
- the fixed dimension [self._max_num_instances, 4].
- gt_classes: Groundtruth classes annotations. The tennsor is padded
- with -1 to the fixed dimension [self._max_num_instances].
- gt_masks: groundtrugh masks cropped by the bounding box and
- resized to a fixed size determined by mask_crop_size.
- """
- classes = data['groundtruth_classes']
- boxes = data['groundtruth_boxes']
- if self._include_mask:
- masks = data['groundtruth_instance_masks']
-
- is_crowds = data['groundtruth_is_crowd']
- # Skips annotations with `is_crowd` = True.
- if self._skip_crowd_during_training:
- num_groundtruths = tf.shape(classes)[0]
- with tf.control_dependencies([num_groundtruths, is_crowds]):
- indices = tf.cond(
- tf.greater(tf.size(is_crowds), 0),
- lambda: tf.where(tf.logical_not(is_crowds))[:, 0],
- lambda: tf.cast(tf.range(num_groundtruths), tf.int64))
- classes = tf.gather(classes, indices)
- boxes = tf.gather(boxes, indices)
- if self._include_mask:
- masks = tf.gather(masks, indices)
-
- # Gets original image and its size.
- image = data['image']
- image_shape = tf.shape(image)[0:2]
-
- # Normalizes image with mean and std pixel values.
- image = preprocess_ops.normalize_image(image)
-
- # Flips image randomly during training.
- if self._aug_rand_hflip:
- if self._include_mask:
- image, boxes, masks = preprocess_ops.random_horizontal_flip(
- image, boxes, masks)
- else:
- image, boxes, _ = preprocess_ops.random_horizontal_flip(
- image, boxes)
-
- # Converts boxes from normalized coordinates to pixel coordinates.
- # Now the coordinates of boxes are w.r.t. the original image.
- boxes = box_ops.denormalize_boxes(boxes, image_shape)
-
- # Resizes and crops image.
- image, image_info = preprocess_ops.resize_and_crop_image(
- image,
- self._output_size,
- padded_size=preprocess_ops.compute_padded_size(
- self._output_size, 2 ** self._max_level),
- aug_scale_min=self._aug_scale_min,
- aug_scale_max=self._aug_scale_max)
- image_height, image_width, _ = image.get_shape().as_list()
-
- # Resizes and crops boxes.
- # Now the coordinates of boxes are w.r.t the scaled image.
- image_scale = image_info[2, :]
- offset = image_info[3, :]
- boxes = preprocess_ops.resize_and_crop_boxes(
- boxes, image_scale, image_info[1, :], offset)
-
- # Filters out ground truth boxes that are all zeros.
- indices = box_ops.get_non_empty_box_indices(boxes)
- boxes = tf.gather(boxes, indices)
- classes = tf.gather(classes, indices)
- if self._include_mask:
- masks = tf.gather(masks, indices)
- # Transfer boxes to the original image space and do normalization.
- cropped_boxes = boxes + tf.tile(tf.expand_dims(offset, axis=0), [1, 2])
- cropped_boxes /= tf.tile(tf.expand_dims(image_scale, axis=0), [1, 2])
- cropped_boxes = box_ops.normalize_boxes(cropped_boxes, image_shape)
- num_masks = tf.shape(masks)[0]
- masks = tf.image.crop_and_resize(
- tf.expand_dims(masks, axis=-1),
- cropped_boxes,
- box_indices=tf.range(num_masks, dtype=tf.int32),
- crop_size=[self._mask_crop_size, self._mask_crop_size],
- method='bilinear')
- masks = tf.squeeze(masks, axis=-1)
-
- # Assigns anchor targets.
- # Note that after the target assignment, box targets are absolute pixel
- # offsets w.r.t. the scaled image.
- input_anchor = anchor.build_anchor_generator(
- min_level=self._min_level,
- max_level=self._max_level,
- num_scales=self._num_scales,
- aspect_ratios=self._aspect_ratios,
- anchor_size=self._anchor_size)
- anchor_boxes = input_anchor(image_size=(image_height, image_width))
- anchor_labeler = anchor.RpnAnchorLabeler(
- self._rpn_match_threshold,
- self._rpn_unmatched_threshold,
- self._rpn_batch_size_per_im,
- self._rpn_fg_fraction)
- rpn_score_targets, rpn_box_targets = anchor_labeler.label_anchors(
- anchor_boxes, boxes,
- tf.cast(tf.expand_dims(classes, axis=-1), dtype=tf.float32))
-
- # Casts input image to self._dtype
- image = tf.cast(image, dtype=self._dtype)
-
- # Packs labels for model_fn outputs.
- labels = {
- 'anchor_boxes':
- anchor_boxes,
- 'image_info':
- image_info,
- 'rpn_score_targets':
- rpn_score_targets,
- 'rpn_box_targets':
- rpn_box_targets,
- 'gt_boxes':
- preprocess_ops.clip_or_pad_to_fixed_size(boxes,
- self._max_num_instances,
- -1),
- 'gt_classes':
- preprocess_ops.clip_or_pad_to_fixed_size(classes,
- self._max_num_instances,
- -1),
- }
- if self._include_mask:
- labels['gt_masks'] = preprocess_ops.clip_or_pad_to_fixed_size(
- masks, self._max_num_instances, -1)
-
- return image, labels
-
- def _parse_eval_data(self, data):
- """Parses data for evaluation.
-
- Args:
- data: the decoded tensor dictionary from TfExampleDecoder.
-
- Returns:
- A dictionary of {'images': image, 'labels': labels} where
- image: image tensor that is preproessed to have normalized value and
- dimension [output_size[0], output_size[1], 3]
- labels: a dictionary of tensors used for training. The following
- describes {key: value} pairs in the dictionary.
- source_ids: Source image id. Default value -1 if the source id is
- empty in the groundtruth annotation.
- image_info: a 2D `Tensor` that encodes the information of the image
- and the applied preprocessing. It is in the format of
- [[original_height, original_width], [scaled_height, scaled_width],
- anchor_boxes: ordered dictionary with keys
- [min_level, min_level+1, ..., max_level]. The values are tensor with
- shape [height_l, width_l, 4] representing anchor boxes at each
- level.
- """
- # Gets original image and its size.
- image = data['image']
- image_shape = tf.shape(image)[0:2]
-
- # Normalizes image with mean and std pixel values.
- image = preprocess_ops.normalize_image(image)
-
- # Resizes and crops image.
- image, image_info = preprocess_ops.resize_and_crop_image(
- image,
- self._output_size,
- padded_size=preprocess_ops.compute_padded_size(
- self._output_size, 2 ** self._max_level),
- aug_scale_min=1.0,
- aug_scale_max=1.0)
- image_height, image_width, _ = image.get_shape().as_list()
-
- # Casts input image to self._dtype
- image = tf.cast(image, dtype=self._dtype)
-
- # Converts boxes from normalized coordinates to pixel coordinates.
- boxes = box_ops.denormalize_boxes(data['groundtruth_boxes'], image_shape)
-
- # Compute Anchor boxes.
- input_anchor = anchor.build_anchor_generator(
- min_level=self._min_level,
- max_level=self._max_level,
- num_scales=self._num_scales,
- aspect_ratios=self._aspect_ratios,
- anchor_size=self._anchor_size)
- anchor_boxes = input_anchor(image_size=(image_height, image_width))
-
- labels = {
- 'image_info': image_info,
- 'anchor_boxes': anchor_boxes,
- }
-
- groundtruths = {
- 'source_id': data['source_id'],
- 'height': data['height'],
- 'width': data['width'],
- 'num_detections': tf.shape(data['groundtruth_classes'])[0],
- 'boxes': boxes,
- 'classes': data['groundtruth_classes'],
- 'areas': data['groundtruth_area'],
- 'is_crowds': tf.cast(data['groundtruth_is_crowd'], tf.int32),
- }
- groundtruths['source_id'] = utils.process_source_id(
- groundtruths['source_id'])
- groundtruths = utils.pad_groundtruths_to_fixed_size(
- groundtruths, self._max_num_instances)
- labels['groundtruths'] = groundtruths
- return image, labels
diff --git a/official/vision/beta/dataloaders/parser.py b/official/vision/beta/dataloaders/parser.py
deleted file mode 100644
index 2a415cb018a0dc2b16763abd78e9b530fd766301..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/parser.py
+++ /dev/null
@@ -1,81 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""The generic parser interface."""
-
-import abc
-
-
-class Parser(object):
- """Parses data and produces tensors to be consumed by models."""
-
- __metaclass__ = abc.ABCMeta
-
- @abc.abstractmethod
- def _parse_train_data(self, decoded_tensors):
- """Generates images and labels that are usable for model training.
-
- Args:
- decoded_tensors: a dict of Tensors produced by the decoder.
-
- Returns:
- images: the image tensor.
- labels: a dict of Tensors that contains labels.
- """
- pass
-
- @abc.abstractmethod
- def _parse_eval_data(self, decoded_tensors):
- """Generates images and labels that are usable for model evaluation.
-
- Args:
- decoded_tensors: a dict of Tensors produced by the decoder.
-
- Returns:
- images: the image tensor.
- labels: a dict of Tensors that contains labels.
- """
- pass
-
- def parse_fn(self, is_training):
- """Returns a parse fn that reads and parses raw tensors from the decoder.
-
- Args:
- is_training: a `bool` to indicate whether it is in training mode.
-
- Returns:
- parse: a `callable` that takes the serialized example and generate the
- images, labels tuple where labels is a dict of Tensors that contains
- labels.
- """
- def parse(decoded_tensors):
- """Parses the serialized example data."""
- if is_training:
- return self._parse_train_data(decoded_tensors)
- else:
- return self._parse_eval_data(decoded_tensors)
-
- return parse
-
- @classmethod
- def inference_fn(cls, inputs):
- """Parses inputs for predictions.
-
- Args:
- inputs: A Tensor, or dictionary of Tensors.
-
- Returns:
- processed_inputs: An input tensor to the model.
- """
- pass
diff --git a/official/vision/beta/dataloaders/retinanet_input.py b/official/vision/beta/dataloaders/retinanet_input.py
deleted file mode 100644
index 91c0cd3f664047964ff994e33d729f4bcb3ed655..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/retinanet_input.py
+++ /dev/null
@@ -1,328 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Data parser and processing for RetinaNet.
-
-Parse image and ground truths in a dataset to training targets and package them
-into (image, labels) tuple for RetinaNet.
-"""
-
-# Import libraries
-from absl import logging
-import tensorflow as tf
-
-from official.vision.beta.dataloaders import parser
-from official.vision.beta.dataloaders import utils
-from official.vision.beta.ops import anchor
-from official.vision.beta.ops import augment
-from official.vision.beta.ops import box_ops
-from official.vision.beta.ops import preprocess_ops
-
-
-class Parser(parser.Parser):
- """Parser to parse an image and its annotations into a dictionary of tensors."""
-
- def __init__(self,
- output_size,
- min_level,
- max_level,
- num_scales,
- aspect_ratios,
- anchor_size,
- match_threshold=0.5,
- unmatched_threshold=0.5,
- aug_type=None,
- aug_rand_hflip=False,
- aug_scale_min=1.0,
- aug_scale_max=1.0,
- use_autoaugment=False,
- autoaugment_policy_name='v0',
- skip_crowd_during_training=True,
- max_num_instances=100,
- dtype='bfloat16',
- mode=None):
- """Initializes parameters for parsing annotations in the dataset.
-
- Args:
- output_size: `Tensor` or `list` for [height, width] of output image. The
- output_size should be divided by the largest feature stride 2^max_level.
- min_level: `int` number of minimum level of the output feature pyramid.
- max_level: `int` number of maximum level of the output feature pyramid.
- num_scales: `int` number representing intermediate scales added on each
- level. For instances, num_scales=2 adds one additional intermediate
- anchor scales [2^0, 2^0.5] on each level.
- aspect_ratios: `list` of float numbers representing the aspect raito
- anchors added on each level. The number indicates the ratio of width to
- height. For instances, aspect_ratios=[1.0, 2.0, 0.5] adds three anchors
- on each scale level.
- anchor_size: `float` number representing the scale of size of the base
- anchor to the feature stride 2^level.
- match_threshold: `float` number between 0 and 1 representing the
- lower-bound threshold to assign positive labels for anchors. An anchor
- with a score over the threshold is labeled positive.
- unmatched_threshold: `float` number between 0 and 1 representing the
- upper-bound threshold to assign negative labels for anchors. An anchor
- with a score below the threshold is labeled negative.
- aug_type: An optional Augmentation object to choose from AutoAugment and
- RandAugment.
- aug_rand_hflip: `bool`, if True, augment training with random horizontal
- flip.
- aug_scale_min: `float`, the minimum scale applied to `output_size` for
- data augmentation during training.
- aug_scale_max: `float`, the maximum scale applied to `output_size` for
- data augmentation during training.
- use_autoaugment: `bool`, if True, use the AutoAugment augmentation policy
- during training.
- autoaugment_policy_name: `string` that specifies the name of the
- AutoAugment policy that will be used during training.
- skip_crowd_during_training: `bool`, if True, skip annotations labeled with
- `is_crowd` equals to 1.
- max_num_instances: `int` number of maximum number of instances in an
- image. The groundtruth data will be padded to `max_num_instances`.
- dtype: `str`, data type. One of {`bfloat16`, `float32`, `float16`}.
- mode: a ModeKeys. Specifies if this is training, evaluation, prediction or
- prediction with groundtruths in the outputs.
- """
- self._mode = mode
- self._max_num_instances = max_num_instances
- self._skip_crowd_during_training = skip_crowd_during_training
-
- # Anchor.
- self._output_size = output_size
- self._min_level = min_level
- self._max_level = max_level
- self._num_scales = num_scales
- self._aspect_ratios = aspect_ratios
- self._anchor_size = anchor_size
- self._match_threshold = match_threshold
- self._unmatched_threshold = unmatched_threshold
-
- # Data augmentation.
- self._aug_rand_hflip = aug_rand_hflip
- self._aug_scale_min = aug_scale_min
- self._aug_scale_max = aug_scale_max
-
- # Data augmentation with AutoAugment or RandAugment.
- self._augmenter = None
- if aug_type is not None:
- if aug_type.type == 'autoaug':
- logging.info('Using AutoAugment.')
- self._augmenter = augment.AutoAugment(
- augmentation_name=aug_type.autoaug.augmentation_name,
- cutout_const=aug_type.autoaug.cutout_const,
- translate_const=aug_type.autoaug.translate_const)
- elif aug_type.type == 'randaug':
- logging.info('Using RandAugment.')
- self._augmenter = augment.RandAugment.build_for_detection(
- num_layers=aug_type.randaug.num_layers,
- magnitude=aug_type.randaug.magnitude,
- cutout_const=aug_type.randaug.cutout_const,
- translate_const=aug_type.randaug.translate_const,
- prob_to_apply=aug_type.randaug.prob_to_apply,
- exclude_ops=aug_type.randaug.exclude_ops)
- else:
- raise ValueError(f'Augmentation policy {aug_type.type} not supported.')
-
- # Deprecated. Data Augmentation with AutoAugment.
- self._use_autoaugment = use_autoaugment
- self._autoaugment_policy_name = autoaugment_policy_name
-
- # Data type.
- self._dtype = dtype
-
- def _parse_train_data(self, data):
- """Parses data for training and evaluation."""
- classes = data['groundtruth_classes']
- boxes = data['groundtruth_boxes']
- # If not empty, `attributes` is a dict of (name, ground_truth) pairs.
- # `ground_gruth` of attributes is assumed in shape [N, attribute_size].
- # TODO(xianzhi): support parsing attributes weights.
- attributes = data.get('groundtruth_attributes', {})
- is_crowds = data['groundtruth_is_crowd']
-
- # Skips annotations with `is_crowd` = True.
- if self._skip_crowd_during_training:
- num_groundtrtuhs = tf.shape(input=classes)[0]
- with tf.control_dependencies([num_groundtrtuhs, is_crowds]):
- indices = tf.cond(
- pred=tf.greater(tf.size(input=is_crowds), 0),
- true_fn=lambda: tf.where(tf.logical_not(is_crowds))[:, 0],
- false_fn=lambda: tf.cast(tf.range(num_groundtrtuhs), tf.int64))
- classes = tf.gather(classes, indices)
- boxes = tf.gather(boxes, indices)
- for k, v in attributes.items():
- attributes[k] = tf.gather(v, indices)
-
- # Gets original image.
- image = data['image']
-
- # Apply autoaug or randaug.
- if self._augmenter is not None:
- image, boxes = self._augmenter.distort_with_boxes(image, boxes)
- image_shape = tf.shape(input=image)[0:2]
-
- # Normalizes image with mean and std pixel values.
- image = preprocess_ops.normalize_image(image)
-
- # Flips image randomly during training.
- if self._aug_rand_hflip:
- image, boxes, _ = preprocess_ops.random_horizontal_flip(image, boxes)
-
- # Converts boxes from normalized coordinates to pixel coordinates.
- boxes = box_ops.denormalize_boxes(boxes, image_shape)
-
- # Resizes and crops image.
- image, image_info = preprocess_ops.resize_and_crop_image(
- image,
- self._output_size,
- padded_size=preprocess_ops.compute_padded_size(self._output_size,
- 2**self._max_level),
- aug_scale_min=self._aug_scale_min,
- aug_scale_max=self._aug_scale_max)
- image_height, image_width, _ = image.get_shape().as_list()
-
- # Resizes and crops boxes.
- image_scale = image_info[2, :]
- offset = image_info[3, :]
- boxes = preprocess_ops.resize_and_crop_boxes(boxes, image_scale,
- image_info[1, :], offset)
- # Filters out ground truth boxes that are all zeros.
- indices = box_ops.get_non_empty_box_indices(boxes)
- boxes = tf.gather(boxes, indices)
- classes = tf.gather(classes, indices)
- for k, v in attributes.items():
- attributes[k] = tf.gather(v, indices)
-
- # Assigns anchors.
- input_anchor = anchor.build_anchor_generator(
- min_level=self._min_level,
- max_level=self._max_level,
- num_scales=self._num_scales,
- aspect_ratios=self._aspect_ratios,
- anchor_size=self._anchor_size)
- anchor_boxes = input_anchor(image_size=(image_height, image_width))
- anchor_labeler = anchor.AnchorLabeler(self._match_threshold,
- self._unmatched_threshold)
- (cls_targets, box_targets, att_targets, cls_weights,
- box_weights) = anchor_labeler.label_anchors(
- anchor_boxes, boxes, tf.expand_dims(classes, axis=1), attributes)
-
- # Casts input image to desired data type.
- image = tf.cast(image, dtype=self._dtype)
-
- # Packs labels for model_fn outputs.
- labels = {
- 'cls_targets': cls_targets,
- 'box_targets': box_targets,
- 'anchor_boxes': anchor_boxes,
- 'cls_weights': cls_weights,
- 'box_weights': box_weights,
- 'image_info': image_info,
- }
- if att_targets:
- labels['attribute_targets'] = att_targets
- return image, labels
-
- def _parse_eval_data(self, data):
- """Parses data for training and evaluation."""
- groundtruths = {}
- classes = data['groundtruth_classes']
- boxes = data['groundtruth_boxes']
- # If not empty, `attributes` is a dict of (name, ground_truth) pairs.
- # `ground_gruth` of attributes is assumed in shape [N, attribute_size].
- # TODO(xianzhi): support parsing attributes weights.
- attributes = data.get('groundtruth_attributes', {})
-
- # Gets original image and its size.
- image = data['image']
- image_shape = tf.shape(input=image)[0:2]
-
- # Normalizes image with mean and std pixel values.
- image = preprocess_ops.normalize_image(image)
-
- # Converts boxes from normalized coordinates to pixel coordinates.
- boxes = box_ops.denormalize_boxes(boxes, image_shape)
-
- # Resizes and crops image.
- image, image_info = preprocess_ops.resize_and_crop_image(
- image,
- self._output_size,
- padded_size=preprocess_ops.compute_padded_size(self._output_size,
- 2**self._max_level),
- aug_scale_min=1.0,
- aug_scale_max=1.0)
- image_height, image_width, _ = image.get_shape().as_list()
-
- # Resizes and crops boxes.
- image_scale = image_info[2, :]
- offset = image_info[3, :]
- boxes = preprocess_ops.resize_and_crop_boxes(boxes, image_scale,
- image_info[1, :], offset)
- # Filters out ground truth boxes that are all zeros.
- indices = box_ops.get_non_empty_box_indices(boxes)
- boxes = tf.gather(boxes, indices)
- classes = tf.gather(classes, indices)
- for k, v in attributes.items():
- attributes[k] = tf.gather(v, indices)
-
- # Assigns anchors.
- input_anchor = anchor.build_anchor_generator(
- min_level=self._min_level,
- max_level=self._max_level,
- num_scales=self._num_scales,
- aspect_ratios=self._aspect_ratios,
- anchor_size=self._anchor_size)
- anchor_boxes = input_anchor(image_size=(image_height, image_width))
- anchor_labeler = anchor.AnchorLabeler(self._match_threshold,
- self._unmatched_threshold)
- (cls_targets, box_targets, att_targets, cls_weights,
- box_weights) = anchor_labeler.label_anchors(
- anchor_boxes, boxes, tf.expand_dims(classes, axis=1), attributes)
-
- # Casts input image to desired data type.
- image = tf.cast(image, dtype=self._dtype)
-
- # Sets up groundtruth data for evaluation.
- groundtruths = {
- 'source_id': data['source_id'],
- 'height': data['height'],
- 'width': data['width'],
- 'num_detections': tf.shape(data['groundtruth_classes']),
- 'image_info': image_info,
- 'boxes': box_ops.denormalize_boxes(
- data['groundtruth_boxes'], image_shape),
- 'classes': data['groundtruth_classes'],
- 'areas': data['groundtruth_area'],
- 'is_crowds': tf.cast(data['groundtruth_is_crowd'], tf.int32),
- }
- if 'groundtruth_attributes' in data:
- groundtruths['attributes'] = data['groundtruth_attributes']
- groundtruths['source_id'] = utils.process_source_id(
- groundtruths['source_id'])
- groundtruths = utils.pad_groundtruths_to_fixed_size(
- groundtruths, self._max_num_instances)
-
- # Packs labels for model_fn outputs.
- labels = {
- 'cls_targets': cls_targets,
- 'box_targets': box_targets,
- 'anchor_boxes': anchor_boxes,
- 'cls_weights': cls_weights,
- 'box_weights': box_weights,
- 'image_info': image_info,
- 'groundtruths': groundtruths,
- }
- if att_targets:
- labels['attribute_targets'] = att_targets
- return image, labels
diff --git a/official/vision/beta/dataloaders/segmentation_input.py b/official/vision/beta/dataloaders/segmentation_input.py
deleted file mode 100644
index 101b37ece04193772301a7ddbc5823fd5e54e813..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/segmentation_input.py
+++ /dev/null
@@ -1,218 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Data parser and processing for segmentation datasets."""
-
-import tensorflow as tf
-from official.vision.beta.dataloaders import decoder
-from official.vision.beta.dataloaders import parser
-from official.vision.beta.ops import preprocess_ops
-
-
-class Decoder(decoder.Decoder):
- """A tf.Example decoder for segmentation task."""
-
- def __init__(self):
- self._keys_to_features = {
- 'image/encoded': tf.io.FixedLenFeature((), tf.string, default_value=''),
- 'image/height': tf.io.FixedLenFeature((), tf.int64, default_value=0),
- 'image/width': tf.io.FixedLenFeature((), tf.int64, default_value=0),
- 'image/segmentation/class/encoded':
- tf.io.FixedLenFeature((), tf.string, default_value='')
- }
-
- def decode(self, serialized_example):
- return tf.io.parse_single_example(
- serialized_example, self._keys_to_features)
-
-
-class Parser(parser.Parser):
- """Parser to parse an image and its annotations into a dictionary of tensors.
- """
-
- def __init__(self,
- output_size,
- crop_size=None,
- resize_eval_groundtruth=True,
- groundtruth_padded_size=None,
- ignore_label=255,
- aug_rand_hflip=False,
- preserve_aspect_ratio=True,
- aug_scale_min=1.0,
- aug_scale_max=1.0,
- dtype='float32'):
- """Initializes parameters for parsing annotations in the dataset.
-
- Args:
- output_size: `Tensor` or `list` for [height, width] of output image. The
- output_size should be divided by the largest feature stride 2^max_level.
- crop_size: `Tensor` or `list` for [height, width] of the crop. If
- specified a training crop of size crop_size is returned. This is useful
- for cropping original images during training while evaluating on
- original image sizes.
- resize_eval_groundtruth: `bool`, if True, eval groundtruth masks are
- resized to output_size.
- groundtruth_padded_size: `Tensor` or `list` for [height, width]. When
- resize_eval_groundtruth is set to False, the groundtruth masks are
- padded to this size.
- ignore_label: `int` the pixel with ignore label will not used for training
- and evaluation.
- aug_rand_hflip: `bool`, if True, augment training with random
- horizontal flip.
- preserve_aspect_ratio: `bool`, if True, the aspect ratio is preserved,
- otherwise, the image is resized to output_size.
- aug_scale_min: `float`, the minimum scale applied to `output_size` for
- data augmentation during training.
- aug_scale_max: `float`, the maximum scale applied to `output_size` for
- data augmentation during training.
- dtype: `str`, data type. One of {`bfloat16`, `float32`, `float16`}.
- """
- self._output_size = output_size
- self._crop_size = crop_size
- self._resize_eval_groundtruth = resize_eval_groundtruth
- if (not resize_eval_groundtruth) and (groundtruth_padded_size is None):
- raise ValueError('groundtruth_padded_size ([height, width]) needs to be'
- 'specified when resize_eval_groundtruth is False.')
- self._groundtruth_padded_size = groundtruth_padded_size
- self._ignore_label = ignore_label
- self._preserve_aspect_ratio = preserve_aspect_ratio
-
- # Data augmentation.
- self._aug_rand_hflip = aug_rand_hflip
- self._aug_scale_min = aug_scale_min
- self._aug_scale_max = aug_scale_max
-
- # dtype.
- self._dtype = dtype
-
- def _prepare_image_and_label(self, data):
- """Prepare normalized image and label."""
- image = tf.io.decode_image(data['image/encoded'], channels=3)
- label = tf.io.decode_image(data['image/segmentation/class/encoded'],
- channels=1)
- height = data['image/height']
- width = data['image/width']
- image = tf.reshape(image, (height, width, 3))
-
- label = tf.reshape(label, (1, height, width))
- label = tf.cast(label, tf.float32)
- # Normalizes image with mean and std pixel values.
- image = preprocess_ops.normalize_image(image)
-
- if not self._preserve_aspect_ratio:
- label = tf.reshape(label, [data['image/height'], data['image/width'], 1])
- image = tf.image.resize(image, self._output_size, method='bilinear')
- label = tf.image.resize(label, self._output_size, method='nearest')
- label = tf.reshape(label[:, :, -1], [1] + self._output_size)
-
- return image, label
-
- def _parse_train_data(self, data):
- """Parses data for training and evaluation."""
- image, label = self._prepare_image_and_label(data)
-
- if self._crop_size:
-
- label = tf.reshape(label, [data['image/height'], data['image/width'], 1])
- # If output_size is specified, resize image, and label to desired
- # output_size.
- if self._output_size:
- image = tf.image.resize(image, self._output_size, method='bilinear')
- label = tf.image.resize(label, self._output_size, method='nearest')
-
- image_mask = tf.concat([image, label], axis=2)
- image_mask_crop = tf.image.random_crop(image_mask,
- self._crop_size + [4])
- image = image_mask_crop[:, :, :-1]
- label = tf.reshape(image_mask_crop[:, :, -1], [1] + self._crop_size)
-
- # Flips image randomly during training.
- if self._aug_rand_hflip:
- image, _, label = preprocess_ops.random_horizontal_flip(
- image, masks=label)
-
- train_image_size = self._crop_size if self._crop_size else self._output_size
- # Resizes and crops image.
- image, image_info = preprocess_ops.resize_and_crop_image(
- image,
- train_image_size,
- train_image_size,
- aug_scale_min=self._aug_scale_min,
- aug_scale_max=self._aug_scale_max)
-
- # Resizes and crops boxes.
- image_scale = image_info[2, :]
- offset = image_info[3, :]
-
- # Pad label and make sure the padded region assigned to the ignore label.
- # The label is first offset by +1 and then padded with 0.
- label += 1
- label = tf.expand_dims(label, axis=3)
- label = preprocess_ops.resize_and_crop_masks(
- label, image_scale, train_image_size, offset)
- label -= 1
- label = tf.where(tf.equal(label, -1),
- self._ignore_label * tf.ones_like(label), label)
- label = tf.squeeze(label, axis=0)
- valid_mask = tf.not_equal(label, self._ignore_label)
- labels = {
- 'masks': label,
- 'valid_masks': valid_mask,
- 'image_info': image_info,
- }
-
- # Cast image as self._dtype
- image = tf.cast(image, dtype=self._dtype)
-
- return image, labels
-
- def _parse_eval_data(self, data):
- """Parses data for training and evaluation."""
- image, label = self._prepare_image_and_label(data)
- # The label is first offset by +1 and then padded with 0.
- label += 1
- label = tf.expand_dims(label, axis=3)
-
- # Resizes and crops image.
- image, image_info = preprocess_ops.resize_and_crop_image(
- image, self._output_size, self._output_size)
-
- if self._resize_eval_groundtruth:
- # Resizes eval masks to match input image sizes. In that case, mean IoU
- # is computed on output_size not the original size of the images.
- image_scale = image_info[2, :]
- offset = image_info[3, :]
- label = preprocess_ops.resize_and_crop_masks(label, image_scale,
- self._output_size, offset)
- else:
- label = tf.image.pad_to_bounding_box(
- label, 0, 0, self._groundtruth_padded_size[0],
- self._groundtruth_padded_size[1])
-
- label -= 1
- label = tf.where(tf.equal(label, -1),
- self._ignore_label * tf.ones_like(label), label)
- label = tf.squeeze(label, axis=0)
-
- valid_mask = tf.not_equal(label, self._ignore_label)
- labels = {
- 'masks': label,
- 'valid_masks': valid_mask,
- 'image_info': image_info
- }
-
- # Cast image as self._dtype
- image = tf.cast(image, dtype=self._dtype)
-
- return image, labels
diff --git a/official/vision/beta/dataloaders/tf_example_decoder.py b/official/vision/beta/dataloaders/tf_example_decoder.py
deleted file mode 100644
index 4888ab6343a730803a4349d5052ef4f474449856..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/tf_example_decoder.py
+++ /dev/null
@@ -1,176 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tensorflow Example proto decoder for object detection.
-
-A decoder to decode string tensors containing serialized tensorflow.Example
-protos for object detection.
-"""
-import tensorflow as tf
-
-from official.vision.beta.dataloaders import decoder
-
-
-def _generate_source_id(image_bytes):
- # Hashing using 22 bits since float32 has only 23 mantissa bits.
- return tf.strings.as_string(
- tf.strings.to_hash_bucket_fast(image_bytes, 2 ** 22 - 1))
-
-
-class TfExampleDecoder(decoder.Decoder):
- """Tensorflow Example proto decoder."""
-
- def __init__(self,
- include_mask=False,
- regenerate_source_id=False,
- mask_binarize_threshold=None):
- self._include_mask = include_mask
- self._regenerate_source_id = regenerate_source_id
- self._keys_to_features = {
- 'image/encoded': tf.io.FixedLenFeature((), tf.string),
- 'image/height': tf.io.FixedLenFeature((), tf.int64),
- 'image/width': tf.io.FixedLenFeature((), tf.int64),
- 'image/object/bbox/xmin': tf.io.VarLenFeature(tf.float32),
- 'image/object/bbox/xmax': tf.io.VarLenFeature(tf.float32),
- 'image/object/bbox/ymin': tf.io.VarLenFeature(tf.float32),
- 'image/object/bbox/ymax': tf.io.VarLenFeature(tf.float32),
- 'image/object/class/label': tf.io.VarLenFeature(tf.int64),
- 'image/object/area': tf.io.VarLenFeature(tf.float32),
- 'image/object/is_crowd': tf.io.VarLenFeature(tf.int64),
- }
- self._mask_binarize_threshold = mask_binarize_threshold
- if include_mask:
- self._keys_to_features.update({
- 'image/object/mask': tf.io.VarLenFeature(tf.string),
- })
- if not regenerate_source_id:
- self._keys_to_features.update({
- 'image/source_id': tf.io.FixedLenFeature((), tf.string),
- })
-
- def _decode_image(self, parsed_tensors):
- """Decodes the image and set its static shape."""
- image = tf.io.decode_image(parsed_tensors['image/encoded'], channels=3)
- image.set_shape([None, None, 3])
- return image
-
- def _decode_boxes(self, parsed_tensors):
- """Concat box coordinates in the format of [ymin, xmin, ymax, xmax]."""
- xmin = parsed_tensors['image/object/bbox/xmin']
- xmax = parsed_tensors['image/object/bbox/xmax']
- ymin = parsed_tensors['image/object/bbox/ymin']
- ymax = parsed_tensors['image/object/bbox/ymax']
- return tf.stack([ymin, xmin, ymax, xmax], axis=-1)
-
- def _decode_classes(self, parsed_tensors):
- return parsed_tensors['image/object/class/label']
-
- def _decode_areas(self, parsed_tensors):
- xmin = parsed_tensors['image/object/bbox/xmin']
- xmax = parsed_tensors['image/object/bbox/xmax']
- ymin = parsed_tensors['image/object/bbox/ymin']
- ymax = parsed_tensors['image/object/bbox/ymax']
- height = tf.cast(parsed_tensors['image/height'], dtype=tf.float32)
- width = tf.cast(parsed_tensors['image/width'], dtype=tf.float32)
- return tf.cond(
- tf.greater(tf.shape(parsed_tensors['image/object/area'])[0], 0),
- lambda: parsed_tensors['image/object/area'],
- lambda: (xmax - xmin) * (ymax - ymin) * height * width)
-
- def _decode_masks(self, parsed_tensors):
- """Decode a set of PNG masks to the tf.float32 tensors."""
-
- def _decode_png_mask(png_bytes):
- mask = tf.squeeze(
- tf.io.decode_png(png_bytes, channels=1, dtype=tf.uint8), axis=-1)
- mask = tf.cast(mask, dtype=tf.float32)
- mask.set_shape([None, None])
- return mask
-
- height = parsed_tensors['image/height']
- width = parsed_tensors['image/width']
- masks = parsed_tensors['image/object/mask']
- return tf.cond(
- pred=tf.greater(tf.size(input=masks), 0),
- true_fn=lambda: tf.map_fn(_decode_png_mask, masks, dtype=tf.float32),
- false_fn=lambda: tf.zeros([0, height, width], dtype=tf.float32))
-
- def decode(self, serialized_example):
- """Decode the serialized example.
-
- Args:
- serialized_example: a single serialized tf.Example string.
-
- Returns:
- decoded_tensors: a dictionary of tensors with the following fields:
- - source_id: a string scalar tensor.
- - image: a uint8 tensor of shape [None, None, 3].
- - height: an integer scalar tensor.
- - width: an integer scalar tensor.
- - groundtruth_classes: a int64 tensor of shape [None].
- - groundtruth_is_crowd: a bool tensor of shape [None].
- - groundtruth_area: a float32 tensor of shape [None].
- - groundtruth_boxes: a float32 tensor of shape [None, 4].
- - groundtruth_instance_masks: a float32 tensor of shape
- [None, None, None].
- - groundtruth_instance_masks_png: a string tensor of shape [None].
- """
- parsed_tensors = tf.io.parse_single_example(
- serialized=serialized_example, features=self._keys_to_features)
- for k in parsed_tensors:
- if isinstance(parsed_tensors[k], tf.SparseTensor):
- if parsed_tensors[k].dtype == tf.string:
- parsed_tensors[k] = tf.sparse.to_dense(
- parsed_tensors[k], default_value='')
- else:
- parsed_tensors[k] = tf.sparse.to_dense(
- parsed_tensors[k], default_value=0)
-
- if self._regenerate_source_id:
- source_id = _generate_source_id(parsed_tensors['image/encoded'])
- else:
- source_id = tf.cond(
- tf.greater(tf.strings.length(parsed_tensors['image/source_id']), 0),
- lambda: parsed_tensors['image/source_id'],
- lambda: _generate_source_id(parsed_tensors['image/encoded']))
- image = self._decode_image(parsed_tensors)
- boxes = self._decode_boxes(parsed_tensors)
- classes = self._decode_classes(parsed_tensors)
- areas = self._decode_areas(parsed_tensors)
- is_crowds = tf.cond(
- tf.greater(tf.shape(parsed_tensors['image/object/is_crowd'])[0], 0),
- lambda: tf.cast(parsed_tensors['image/object/is_crowd'], dtype=tf.bool),
- lambda: tf.zeros_like(classes, dtype=tf.bool))
- if self._include_mask:
- masks = self._decode_masks(parsed_tensors)
-
- if self._mask_binarize_threshold is not None:
- masks = tf.cast(masks > self._mask_binarize_threshold, tf.float32)
-
- decoded_tensors = {
- 'source_id': source_id,
- 'image': image,
- 'height': parsed_tensors['image/height'],
- 'width': parsed_tensors['image/width'],
- 'groundtruth_classes': classes,
- 'groundtruth_is_crowd': is_crowds,
- 'groundtruth_area': areas,
- 'groundtruth_boxes': boxes,
- }
- if self._include_mask:
- decoded_tensors.update({
- 'groundtruth_instance_masks': masks,
- 'groundtruth_instance_masks_png': parsed_tensors['image/object/mask'],
- })
- return decoded_tensors
diff --git a/official/vision/beta/dataloaders/tf_example_decoder_test.py b/official/vision/beta/dataloaders/tf_example_decoder_test.py
deleted file mode 100644
index 187285f1b818e54b216eadd76f445361f3479e6f..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/tf_example_decoder_test.py
+++ /dev/null
@@ -1,267 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for tf_example_decoder.py."""
-
-# Import libraries
-from absl.testing import parameterized
-import numpy as np
-import tensorflow as tf
-
-from official.vision.beta.dataloaders import tf_example_decoder
-from official.vision.beta.dataloaders import tfexample_utils
-
-
-class TfExampleDecoderTest(tf.test.TestCase, parameterized.TestCase):
-
- @parameterized.parameters(
- (100, 100, 0, True),
- (100, 100, 1, True),
- (100, 100, 2, True),
- (100, 100, 0, False),
- (100, 100, 1, False),
- (100, 100, 2, False),
- )
- def test_result_shape(self,
- image_height,
- image_width,
- num_instances,
- regenerate_source_id):
- decoder = tf_example_decoder.TfExampleDecoder(
- include_mask=True, regenerate_source_id=regenerate_source_id)
-
- serialized_example = tfexample_utils.create_detection_test_example(
- image_height=image_height,
- image_width=image_width,
- image_channel=3,
- num_instances=num_instances).SerializeToString()
- decoded_tensors = decoder.decode(
- tf.convert_to_tensor(value=serialized_example))
-
- results = tf.nest.map_structure(lambda x: x.numpy(), decoded_tensors)
-
- self.assertAllEqual(
- (image_height, image_width, 3), results['image'].shape)
- if not regenerate_source_id:
- self.assertEqual(tfexample_utils.DUMP_SOURCE_ID, results['source_id'])
- self.assertEqual(image_height, results['height'])
- self.assertEqual(image_width, results['width'])
- self.assertAllEqual(
- (num_instances,), results['groundtruth_classes'].shape)
- self.assertAllEqual(
- (num_instances,), results['groundtruth_is_crowd'].shape)
- self.assertAllEqual(
- (num_instances,), results['groundtruth_area'].shape)
- self.assertAllEqual(
- (num_instances, 4), results['groundtruth_boxes'].shape)
- self.assertAllEqual(
- (num_instances, image_height, image_width),
- results['groundtruth_instance_masks'].shape)
- self.assertAllEqual(
- (num_instances,), results['groundtruth_instance_masks_png'].shape)
-
- def test_result_content(self):
- decoder = tf_example_decoder.TfExampleDecoder(include_mask=True)
-
- image_content = [[[0, 0, 0], [0, 0, 0], [0, 0, 0], [0, 0, 0]],
- [[0, 0, 0], [255, 255, 255], [255, 255, 255], [0, 0, 0]],
- [[0, 0, 0], [255, 255, 255], [255, 255, 255], [0, 0, 0]],
- [[0, 0, 0], [0, 0, 0], [0, 0, 0], [0, 0, 0]]]
- image = tfexample_utils.encode_image(np.uint8(image_content), fmt='PNG')
- image_height = 4
- image_width = 4
- num_instances = 2
- xmins = [0, 0.25]
- xmaxs = [0.5, 1.0]
- ymins = [0, 0]
- ymaxs = [0.5, 1.0]
- labels = [3, 1]
- areas = [
- 0.25 * image_height * image_width, 0.75 * image_height * image_width
- ]
- is_crowds = [1, 0]
- mask_content = [[[255, 255, 0, 0],
- [255, 255, 0, 0],
- [0, 0, 0, 0],
- [0, 0, 0, 0]],
- [[0, 255, 255, 255],
- [0, 255, 255, 255],
- [0, 255, 255, 255],
- [0, 255, 255, 255]]]
- masks = [
- tfexample_utils.encode_image(np.uint8(m), fmt='PNG')
- for m in list(mask_content)
- ]
- serialized_example = tf.train.Example(
- features=tf.train.Features(
- feature={
- 'image/encoded': (tf.train.Feature(
- bytes_list=tf.train.BytesList(value=[image]))),
- 'image/source_id': (tf.train.Feature(
- bytes_list=tf.train.BytesList(
- value=[tfexample_utils.DUMP_SOURCE_ID]))),
- 'image/height': (tf.train.Feature(
- int64_list=tf.train.Int64List(value=[image_height]))),
- 'image/width': (tf.train.Feature(
- int64_list=tf.train.Int64List(value=[image_width]))),
- 'image/object/bbox/xmin': (tf.train.Feature(
- float_list=tf.train.FloatList(value=xmins))),
- 'image/object/bbox/xmax': (tf.train.Feature(
- float_list=tf.train.FloatList(value=xmaxs))),
- 'image/object/bbox/ymin': (tf.train.Feature(
- float_list=tf.train.FloatList(value=ymins))),
- 'image/object/bbox/ymax': (tf.train.Feature(
- float_list=tf.train.FloatList(value=ymaxs))),
- 'image/object/class/label': (tf.train.Feature(
- int64_list=tf.train.Int64List(value=labels))),
- 'image/object/is_crowd': (tf.train.Feature(
- int64_list=tf.train.Int64List(value=is_crowds))),
- 'image/object/area': (tf.train.Feature(
- float_list=tf.train.FloatList(value=areas))),
- 'image/object/mask': (tf.train.Feature(
- bytes_list=tf.train.BytesList(value=masks))),
- })).SerializeToString()
- decoded_tensors = decoder.decode(
- tf.convert_to_tensor(value=serialized_example))
-
- results = tf.nest.map_structure(lambda x: x.numpy(), decoded_tensors)
-
- self.assertAllEqual(
- (image_height, image_width, 3), results['image'].shape)
- self.assertAllEqual(image_content, results['image'])
- self.assertEqual(tfexample_utils.DUMP_SOURCE_ID, results['source_id'])
- self.assertEqual(image_height, results['height'])
- self.assertEqual(image_width, results['width'])
- self.assertAllEqual(
- (num_instances,), results['groundtruth_classes'].shape)
- self.assertAllEqual(
- (num_instances,), results['groundtruth_is_crowd'].shape)
- self.assertAllEqual(
- (num_instances,), results['groundtruth_area'].shape)
- self.assertAllEqual(
- (num_instances, 4), results['groundtruth_boxes'].shape)
- self.assertAllEqual(
- (num_instances, image_height, image_width),
- results['groundtruth_instance_masks'].shape)
- self.assertAllEqual(
- (num_instances,), results['groundtruth_instance_masks_png'].shape)
- self.assertAllEqual(
- [3, 1], results['groundtruth_classes'])
- self.assertAllEqual(
- [True, False], results['groundtruth_is_crowd'])
- self.assertNDArrayNear(
- [0.25 * image_height * image_width, 0.75 * image_height * image_width],
- results['groundtruth_area'], 1e-4)
- self.assertNDArrayNear(
- [[0, 0, 0.5, 0.5], [0, 0.25, 1.0, 1.0]],
- results['groundtruth_boxes'], 1e-4)
- self.assertNDArrayNear(
- mask_content, results['groundtruth_instance_masks'], 1e-4)
- self.assertAllEqual(
- masks, results['groundtruth_instance_masks_png'])
-
- def test_handling_missing_fields(self):
- decoder = tf_example_decoder.TfExampleDecoder(include_mask=True)
-
- image_content = [[[0, 0, 0], [0, 0, 0], [0, 0, 0], [0, 0, 0]],
- [[0, 0, 0], [255, 255, 255], [255, 255, 255], [0, 0, 0]],
- [[0, 0, 0], [255, 255, 255], [255, 255, 255], [0, 0, 0]],
- [[0, 0, 0], [0, 0, 0], [0, 0, 0], [0, 0, 0]]]
- image = tfexample_utils.encode_image(np.uint8(image_content), fmt='PNG')
- image_height = 4
- image_width = 4
- num_instances = 2
- xmins = [0, 0.25]
- xmaxs = [0.5, 1.0]
- ymins = [0, 0]
- ymaxs = [0.5, 1.0]
- labels = [3, 1]
- mask_content = [[[255, 255, 0, 0],
- [255, 255, 0, 0],
- [0, 0, 0, 0],
- [0, 0, 0, 0]],
- [[0, 255, 255, 255],
- [0, 255, 255, 255],
- [0, 255, 255, 255],
- [0, 255, 255, 255]]]
- masks = [
- tfexample_utils.encode_image(np.uint8(m), fmt='PNG')
- for m in list(mask_content)
- ]
- serialized_example = tf.train.Example(
- features=tf.train.Features(
- feature={
- 'image/encoded': (tf.train.Feature(
- bytes_list=tf.train.BytesList(value=[image]))),
- 'image/source_id': (tf.train.Feature(
- bytes_list=tf.train.BytesList(
- value=[tfexample_utils.DUMP_SOURCE_ID]))),
- 'image/height': (tf.train.Feature(
- int64_list=tf.train.Int64List(value=[image_height]))),
- 'image/width': (tf.train.Feature(
- int64_list=tf.train.Int64List(value=[image_width]))),
- 'image/object/bbox/xmin': (tf.train.Feature(
- float_list=tf.train.FloatList(value=xmins))),
- 'image/object/bbox/xmax': (tf.train.Feature(
- float_list=tf.train.FloatList(value=xmaxs))),
- 'image/object/bbox/ymin': (tf.train.Feature(
- float_list=tf.train.FloatList(value=ymins))),
- 'image/object/bbox/ymax': (tf.train.Feature(
- float_list=tf.train.FloatList(value=ymaxs))),
- 'image/object/class/label': (tf.train.Feature(
- int64_list=tf.train.Int64List(value=labels))),
- 'image/object/mask': (tf.train.Feature(
- bytes_list=tf.train.BytesList(value=masks))),
- })).SerializeToString()
- decoded_tensors = decoder.decode(
- tf.convert_to_tensor(serialized_example))
- results = tf.nest.map_structure(lambda x: x.numpy(), decoded_tensors)
-
- self.assertAllEqual(
- (image_height, image_width, 3), results['image'].shape)
- self.assertAllEqual(image_content, results['image'])
- self.assertEqual(tfexample_utils.DUMP_SOURCE_ID, results['source_id'])
- self.assertEqual(image_height, results['height'])
- self.assertEqual(image_width, results['width'])
- self.assertAllEqual(
- (num_instances,), results['groundtruth_classes'].shape)
- self.assertAllEqual(
- (num_instances,), results['groundtruth_is_crowd'].shape)
- self.assertAllEqual(
- (num_instances,), results['groundtruth_area'].shape)
- self.assertAllEqual(
- (num_instances, 4), results['groundtruth_boxes'].shape)
- self.assertAllEqual(
- (num_instances, image_height, image_width),
- results['groundtruth_instance_masks'].shape)
- self.assertAllEqual(
- (num_instances,), results['groundtruth_instance_masks_png'].shape)
- self.assertAllEqual(
- [3, 1], results['groundtruth_classes'])
- self.assertAllEqual(
- [False, False], results['groundtruth_is_crowd'])
- self.assertNDArrayNear(
- [0.25 * image_height * image_width, 0.75 * image_height * image_width],
- results['groundtruth_area'], 1e-4)
- self.assertNDArrayNear(
- [[0, 0, 0.5, 0.5], [0, 0.25, 1.0, 1.0]],
- results['groundtruth_boxes'], 1e-4)
- self.assertNDArrayNear(
- mask_content, results['groundtruth_instance_masks'], 1e-4)
- self.assertAllEqual(
- masks, results['groundtruth_instance_masks_png'])
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/dataloaders/tf_example_label_map_decoder.py b/official/vision/beta/dataloaders/tf_example_label_map_decoder.py
deleted file mode 100644
index c6da29ded10f830d7eadb97bc52e35718adf9a57..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/tf_example_label_map_decoder.py
+++ /dev/null
@@ -1,67 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tensorflow Example proto decoder for object detection.
-
-A decoder to decode string tensors containing serialized tensorflow.Example
-protos for object detection.
-"""
-import csv
-# Import libraries
-import tensorflow as tf
-
-from official.vision.beta.dataloaders import tf_example_decoder
-
-
-class TfExampleDecoderLabelMap(tf_example_decoder.TfExampleDecoder):
- """Tensorflow Example proto decoder."""
-
- def __init__(self, label_map, include_mask=False, regenerate_source_id=False,
- mask_binarize_threshold=None):
- super(TfExampleDecoderLabelMap, self).__init__(
- include_mask=include_mask, regenerate_source_id=regenerate_source_id,
- mask_binarize_threshold=mask_binarize_threshold)
- self._keys_to_features.update({
- 'image/object/class/text': tf.io.VarLenFeature(tf.string),
- })
- name_to_id = self._process_label_map(label_map)
- self._name_to_id_table = tf.lookup.StaticHashTable(
- tf.lookup.KeyValueTensorInitializer(
- keys=tf.constant(list(name_to_id.keys()), dtype=tf.string),
- values=tf.constant(list(name_to_id.values()), dtype=tf.int64)),
- default_value=-1)
-
- def _process_label_map(self, label_map):
- if label_map.endswith('.csv'):
- name_to_id = self._process_csv(label_map)
- else:
- raise ValueError('The label map file is in incorrect format.')
- return name_to_id
-
- def _process_csv(self, label_map):
- name_to_id = {}
- with tf.io.gfile.GFile(label_map, 'r') as f:
- reader = csv.reader(f, delimiter=',')
- for row in reader:
- if len(row) != 2:
- raise ValueError('Each row of the csv label map file must be in '
- '`id,name` format. length = {}'.format(len(row)))
- id_index = int(row[0])
- name = row[1]
- name_to_id[name] = id_index
- return name_to_id
-
- def _decode_classes(self, parsed_tensors):
- return self._name_to_id_table.lookup(
- parsed_tensors['image/object/class/text'])
diff --git a/official/vision/beta/dataloaders/tf_example_label_map_decoder_test.py b/official/vision/beta/dataloaders/tf_example_label_map_decoder_test.py
deleted file mode 100644
index 54d7810f6d5430f47a5003c966bee1632e40b82b..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/tf_example_label_map_decoder_test.py
+++ /dev/null
@@ -1,188 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for tf_example_label_map_decoder.py."""
-
-import os
-# Import libraries
-from absl.testing import parameterized
-import numpy as np
-import tensorflow as tf
-
-from official.vision.beta.dataloaders import tf_example_label_map_decoder
-from official.vision.beta.dataloaders import tfexample_utils
-
-
-LABEL_MAP_CSV_CONTENT = '0,class_0\n1,class_1\n2,class_2'
-
-
-class TfExampleDecoderLabelMapTest(tf.test.TestCase, parameterized.TestCase):
-
- @parameterized.parameters(
- (100, 100, 0),
- (100, 100, 1),
- (100, 100, 2),
- (100, 100, 0),
- (100, 100, 1),
- (100, 100, 2),
- )
- def test_result_shape(self, image_height, image_width, num_instances):
- label_map_dir = self.get_temp_dir()
- label_map_name = 'label_map.csv'
- label_map_path = os.path.join(label_map_dir, label_map_name)
- with open(label_map_path, 'w') as f:
- f.write(LABEL_MAP_CSV_CONTENT)
-
- decoder = tf_example_label_map_decoder.TfExampleDecoderLabelMap(
- label_map_path, include_mask=True)
-
- serialized_example = tfexample_utils.create_detection_test_example(
- image_height=image_height,
- image_width=image_width,
- image_channel=3,
- num_instances=num_instances).SerializeToString()
- decoded_tensors = decoder.decode(
- tf.convert_to_tensor(value=serialized_example))
-
- results = tf.nest.map_structure(lambda x: x.numpy(), decoded_tensors)
-
- self.assertAllEqual(
- (image_height, image_width, 3), results['image'].shape)
- self.assertEqual(tfexample_utils.DUMP_SOURCE_ID, results['source_id'])
- self.assertEqual(image_height, results['height'])
- self.assertEqual(image_width, results['width'])
- self.assertAllEqual(
- (num_instances,), results['groundtruth_classes'].shape)
- self.assertAllEqual(
- (num_instances,), results['groundtruth_is_crowd'].shape)
- self.assertAllEqual(
- (num_instances,), results['groundtruth_area'].shape)
- self.assertAllEqual(
- (num_instances, 4), results['groundtruth_boxes'].shape)
- self.assertAllEqual(
- (num_instances, image_height, image_width),
- results['groundtruth_instance_masks'].shape)
- self.assertAllEqual(
- (num_instances,), results['groundtruth_instance_masks_png'].shape)
-
- def test_result_content(self):
- label_map_dir = self.get_temp_dir()
- label_map_name = 'label_map.csv'
- label_map_path = os.path.join(label_map_dir, label_map_name)
- with open(label_map_path, 'w') as f:
- f.write(LABEL_MAP_CSV_CONTENT)
-
- decoder = tf_example_label_map_decoder.TfExampleDecoderLabelMap(
- label_map_path, include_mask=True)
-
- image_content = [[[0, 0, 0], [0, 0, 0], [0, 0, 0], [0, 0, 0]],
- [[0, 0, 0], [255, 255, 255], [255, 255, 255], [0, 0, 0]],
- [[0, 0, 0], [255, 255, 255], [255, 255, 255], [0, 0, 0]],
- [[0, 0, 0], [0, 0, 0], [0, 0, 0], [0, 0, 0]]]
- image = tfexample_utils.encode_image(np.uint8(image_content), fmt='PNG')
- image_height = 4
- image_width = 4
- num_instances = 2
- xmins = [0, 0.25]
- xmaxs = [0.5, 1.0]
- ymins = [0, 0]
- ymaxs = [0.5, 1.0]
- labels = [b'class_2', b'class_0']
- areas = [
- 0.25 * image_height * image_width, 0.75 * image_height * image_width
- ]
- is_crowds = [1, 0]
- mask_content = [[[255, 255, 0, 0],
- [255, 255, 0, 0],
- [0, 0, 0, 0],
- [0, 0, 0, 0]],
- [[0, 255, 255, 255],
- [0, 255, 255, 255],
- [0, 255, 255, 255],
- [0, 255, 255, 255]]]
- masks = [
- tfexample_utils.encode_image(np.uint8(m), fmt='PNG')
- for m in list(mask_content)
- ]
- serialized_example = tf.train.Example(
- features=tf.train.Features(
- feature={
- 'image/encoded': (tf.train.Feature(
- bytes_list=tf.train.BytesList(value=[image]))),
- 'image/source_id': (tf.train.Feature(
- bytes_list=tf.train.BytesList(
- value=[tfexample_utils.DUMP_SOURCE_ID]))),
- 'image/height': (tf.train.Feature(
- int64_list=tf.train.Int64List(value=[image_height]))),
- 'image/width': (tf.train.Feature(
- int64_list=tf.train.Int64List(value=[image_width]))),
- 'image/object/bbox/xmin': (tf.train.Feature(
- float_list=tf.train.FloatList(value=xmins))),
- 'image/object/bbox/xmax': (tf.train.Feature(
- float_list=tf.train.FloatList(value=xmaxs))),
- 'image/object/bbox/ymin': (tf.train.Feature(
- float_list=tf.train.FloatList(value=ymins))),
- 'image/object/bbox/ymax': (tf.train.Feature(
- float_list=tf.train.FloatList(value=ymaxs))),
- 'image/object/class/text': (tf.train.Feature(
- bytes_list=tf.train.BytesList(value=labels))),
- 'image/object/is_crowd': (tf.train.Feature(
- int64_list=tf.train.Int64List(value=is_crowds))),
- 'image/object/area': (tf.train.Feature(
- float_list=tf.train.FloatList(value=areas))),
- 'image/object/mask': (tf.train.Feature(
- bytes_list=tf.train.BytesList(value=masks))),
- })).SerializeToString()
- decoded_tensors = decoder.decode(
- tf.convert_to_tensor(value=serialized_example))
-
- results = tf.nest.map_structure(lambda x: x.numpy(), decoded_tensors)
-
- self.assertAllEqual(
- (image_height, image_width, 3), results['image'].shape)
- self.assertAllEqual(image_content, results['image'])
- self.assertEqual(tfexample_utils.DUMP_SOURCE_ID, results['source_id'])
- self.assertEqual(image_height, results['height'])
- self.assertEqual(image_width, results['width'])
- self.assertAllEqual(
- (num_instances,), results['groundtruth_classes'].shape)
- self.assertAllEqual(
- (num_instances,), results['groundtruth_is_crowd'].shape)
- self.assertAllEqual(
- (num_instances,), results['groundtruth_area'].shape)
- self.assertAllEqual(
- (num_instances, 4), results['groundtruth_boxes'].shape)
- self.assertAllEqual(
- (num_instances, image_height, image_width),
- results['groundtruth_instance_masks'].shape)
- self.assertAllEqual(
- (num_instances,), results['groundtruth_instance_masks_png'].shape)
- self.assertAllEqual(
- [2, 0], results['groundtruth_classes'])
- self.assertAllEqual(
- [True, False], results['groundtruth_is_crowd'])
- self.assertNDArrayNear(
- [0.25 * image_height * image_width, 0.75 * image_height * image_width],
- results['groundtruth_area'], 1e-4)
- self.assertNDArrayNear(
- [[0, 0, 0.5, 0.5], [0, 0.25, 1.0, 1.0]],
- results['groundtruth_boxes'], 1e-4)
- self.assertNDArrayNear(
- mask_content, results['groundtruth_instance_masks'], 1e-4)
- self.assertAllEqual(
- masks, results['groundtruth_instance_masks_png'])
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/dataloaders/tfds_classification_decoders.py b/official/vision/beta/dataloaders/tfds_classification_decoders.py
deleted file mode 100644
index cfb315590a9cc0581603a709205b01bf4a538063..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/tfds_classification_decoders.py
+++ /dev/null
@@ -1,38 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""TFDS Classification decoders."""
-
-import tensorflow as tf
-from official.vision.beta.dataloaders import decoder
-
-
-class ClassificationDecorder(decoder.Decoder):
- """A tf.Example decoder for tfds classification datasets."""
-
- def decode(self, serialized_example):
- sample_dict = {
- 'image/encoded':
- tf.io.encode_jpeg(serialized_example['image'], quality=100),
- 'image/class/label':
- serialized_example['label'],
- }
- return sample_dict
-
-
-TFDS_ID_TO_DECODER_MAP = {
- 'cifar10': ClassificationDecorder,
- 'cifar100': ClassificationDecorder,
- 'imagenet2012': ClassificationDecorder,
-}
diff --git a/official/vision/beta/dataloaders/tfds_detection_decoders.py b/official/vision/beta/dataloaders/tfds_detection_decoders.py
deleted file mode 100644
index 0ecf88ba9b5ce7aca96e79d960037e983ddfe622..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/tfds_detection_decoders.py
+++ /dev/null
@@ -1,60 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""TFDS detection decoders."""
-
-import tensorflow as tf
-from official.vision.beta.dataloaders import decoder
-
-
-class MSCOCODecoder(decoder.Decoder):
- """A tf.Example decoder for tfds coco datasets."""
-
- def decode(self, serialized_example):
- """Decode the serialized example.
-
- Args:
- serialized_example: a dictonary example produced by tfds.
-
- Returns:
- decoded_tensors: a dictionary of tensors with the following fields:
- - source_id: a string scalar tensor.
- - image: a uint8 tensor of shape [None, None, 3].
- - height: an integer scalar tensor.
- - width: an integer scalar tensor.
- - groundtruth_classes: a int64 tensor of shape [None].
- - groundtruth_is_crowd: a bool tensor of shape [None].
- - groundtruth_area: a float32 tensor of shape [None].
- - groundtruth_boxes: a float32 tensor of shape [None, 4].
- """
-
- decoded_tensors = {
- 'source_id': tf.strings.as_string(serialized_example['image/id']),
- 'image': serialized_example['image'],
- 'height': tf.cast(tf.shape(serialized_example['image'])[0], tf.int64),
- 'width': tf.cast(tf.shape(serialized_example['image'])[1], tf.int64),
- 'groundtruth_classes': serialized_example['objects']['label'],
- 'groundtruth_is_crowd': serialized_example['objects']['is_crowd'],
- 'groundtruth_area': tf.cast(
- serialized_example['objects']['area'], tf.float32),
- 'groundtruth_boxes': serialized_example['objects']['bbox'],
- }
- return decoded_tensors
-
-
-TFDS_ID_TO_DECODER_MAP = {
- 'coco/2017': MSCOCODecoder,
- 'coco/2014': MSCOCODecoder,
- 'coco': MSCOCODecoder
-}
diff --git a/official/vision/beta/dataloaders/tfds_factory.py b/official/vision/beta/dataloaders/tfds_factory.py
deleted file mode 100644
index bedaff491fc5d1a83beda55c42a4b5b8554066f1..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/tfds_factory.py
+++ /dev/null
@@ -1,71 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""TFDS factory functions."""
-from official.vision.beta.dataloaders import decoder as base_decoder
-from official.vision.beta.dataloaders import tfds_detection_decoders
-from official.vision.beta.dataloaders import tfds_segmentation_decoders
-from official.vision.beta.dataloaders import tfds_classification_decoders
-
-
-def get_classification_decoder(tfds_name: str) -> base_decoder.Decoder:
- """Gets classification decoder.
-
- Args:
- tfds_name: `str`, name of the tfds classification decoder.
- Returns:
- `base_decoder.Decoder` instance.
- Raises:
- ValueError if the tfds_name doesn't exist in the available decoders.
- """
- if tfds_name in tfds_classification_decoders.TFDS_ID_TO_DECODER_MAP:
- decoder = tfds_classification_decoders.TFDS_ID_TO_DECODER_MAP[tfds_name]()
- else:
- raise ValueError(
- f'TFDS Classification {tfds_name} is not supported')
- return decoder
-
-
-def get_detection_decoder(tfds_name: str) -> base_decoder.Decoder:
- """Gets detection decoder.
-
- Args:
- tfds_name: `str`, name of the tfds detection decoder.
- Returns:
- `base_decoder.Decoder` instance.
- Raises:
- ValueError if the tfds_name doesn't exist in the available decoders.
- """
- if tfds_name in tfds_detection_decoders.TFDS_ID_TO_DECODER_MAP:
- decoder = tfds_detection_decoders.TFDS_ID_TO_DECODER_MAP[tfds_name]()
- else:
- raise ValueError(f'TFDS Detection {tfds_name} is not supported')
- return decoder
-
-
-def get_segmentation_decoder(tfds_name: str) -> base_decoder.Decoder:
- """Gets segmentation decoder.
-
- Args:
- tfds_name: `str`, name of the tfds segmentation decoder.
- Returns:
- `base_decoder.Decoder` instance.
- Raises:
- ValueError if the tfds_name doesn't exist in the available decoders.
- """
- if tfds_name in tfds_segmentation_decoders.TFDS_ID_TO_DECODER_MAP:
- decoder = tfds_segmentation_decoders.TFDS_ID_TO_DECODER_MAP[tfds_name]()
- else:
- raise ValueError(f'TFDS Segmentation {tfds_name} is not supported')
- return decoder
diff --git a/official/vision/beta/dataloaders/tfds_factory_test.py b/official/vision/beta/dataloaders/tfds_factory_test.py
deleted file mode 100644
index 7629b9423457216ccdd244faeb96f1464b5c949c..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/tfds_factory_test.py
+++ /dev/null
@@ -1,114 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for tfds factory functions."""
-
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.vision.beta.dataloaders import decoder as base_decoder
-from official.vision.beta.dataloaders import tfds_factory
-
-
-class TFDSFactoryTest(tf.test.TestCase, parameterized.TestCase):
-
- def _create_test_example(self):
- serialized_example = {
- 'image': tf.ones(shape=(100, 100, 3), dtype=tf.uint8),
- 'label': 1,
- 'image/id': 0,
- 'objects': {
- 'label': 1,
- 'is_crowd': 0,
- 'area': 0.5,
- 'bbox': [0.1, 0.2, 0.3, 0.4]
- },
- 'segmentation_label': tf.ones((100, 100, 1), dtype=tf.uint8),
- 'image_left': tf.ones(shape=(100, 100, 3), dtype=tf.uint8)
- }
- return serialized_example
-
- @parameterized.parameters(
- ('imagenet2012'),
- ('cifar10'),
- ('cifar100'),
- )
- def test_classification_decoder(self, tfds_name):
- decoder = tfds_factory.get_classification_decoder(tfds_name)
- self.assertIsInstance(decoder, base_decoder.Decoder)
- decoded_tensor = decoder.decode(self._create_test_example())
- self.assertLen(decoded_tensor, 2)
- self.assertIn('image/encoded', decoded_tensor)
- self.assertIn('image/class/label', decoded_tensor)
-
- @parameterized.parameters(
- ('flowers'),
- ('coco'),
- )
- def test_doesnt_exit_classification_decoder(self, tfds_name):
- with self.assertRaises(ValueError):
- _ = tfds_factory.get_classification_decoder(tfds_name)
-
- @parameterized.parameters(
- ('coco'),
- ('coco/2014'),
- ('coco/2017'),
- )
- def test_detection_decoder(self, tfds_name):
- decoder = tfds_factory.get_detection_decoder(tfds_name)
- self.assertIsInstance(decoder, base_decoder.Decoder)
- decoded_tensor = decoder.decode(self._create_test_example())
- self.assertLen(decoded_tensor, 8)
- self.assertIn('image', decoded_tensor)
- self.assertIn('source_id', decoded_tensor)
- self.assertIn('height', decoded_tensor)
- self.assertIn('width', decoded_tensor)
- self.assertIn('groundtruth_classes', decoded_tensor)
- self.assertIn('groundtruth_is_crowd', decoded_tensor)
- self.assertIn('groundtruth_area', decoded_tensor)
- self.assertIn('groundtruth_boxes', decoded_tensor)
-
- @parameterized.parameters(
- ('pascal'),
- ('cityscapes'),
- )
- def test_doesnt_exit_detection_decoder(self, tfds_name):
- with self.assertRaises(ValueError):
- _ = tfds_factory.get_detection_decoder(tfds_name)
-
- @parameterized.parameters(
- ('cityscapes'),
- ('cityscapes/semantic_segmentation'),
- ('cityscapes/semantic_segmentation_extra'),
- )
- def test_segmentation_decoder(self, tfds_name):
- decoder = tfds_factory.get_segmentation_decoder(tfds_name)
- self.assertIsInstance(decoder, base_decoder.Decoder)
- decoded_tensor = decoder.decode(self._create_test_example())
- self.assertLen(decoded_tensor, 4)
- self.assertIn('image/encoded', decoded_tensor)
- self.assertIn('image/segmentation/class/encoded', decoded_tensor)
- self.assertIn('image/height', decoded_tensor)
- self.assertIn('image/width', decoded_tensor)
-
- @parameterized.parameters(
- ('coco'),
- ('imagenet'),
- )
- def test_doesnt_exit_segmentation_decoder(self, tfds_name):
- with self.assertRaises(ValueError):
- _ = tfds_factory.get_segmentation_decoder(tfds_name)
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/dataloaders/tfds_segmentation_decoders.py b/official/vision/beta/dataloaders/tfds_segmentation_decoders.py
deleted file mode 100644
index 8d29b836a01dfaa56fcc159be70684d0989612fc..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/tfds_segmentation_decoders.py
+++ /dev/null
@@ -1,86 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""TFDS Semantic Segmentation decoders."""
-
-import tensorflow as tf
-from official.vision.beta.dataloaders import decoder
-
-
-class CityScapesDecorder(decoder.Decoder):
- """A tf.Example decoder for tfds cityscapes datasets."""
-
- def __init__(self):
- # Original labels to trainable labels map, 255 is the ignore class.
- self._label_map = {
- -1: 255,
- 0: 255,
- 1: 255,
- 2: 255,
- 3: 255,
- 4: 255,
- 5: 255,
- 6: 255,
- 7: 0,
- 8: 1,
- 9: 255,
- 10: 255,
- 11: 2,
- 12: 3,
- 13: 4,
- 14: 255,
- 15: 255,
- 16: 255,
- 17: 5,
- 18: 255,
- 19: 6,
- 20: 7,
- 21: 8,
- 22: 9,
- 23: 10,
- 24: 11,
- 25: 12,
- 26: 13,
- 27: 14,
- 28: 15,
- 29: 255,
- 30: 255,
- 31: 16,
- 32: 17,
- 33: 18,
- }
-
- def decode(self, serialized_example):
- # Convert labels according to the self._label_map
- label = serialized_example['segmentation_label']
- for original_label in self._label_map:
- label = tf.where(label == original_label,
- self._label_map[original_label] * tf.ones_like(label),
- label)
- sample_dict = {
- 'image/encoded':
- tf.io.encode_jpeg(serialized_example['image_left'], quality=100),
- 'image/height': serialized_example['image_left'].shape[0],
- 'image/width': serialized_example['image_left'].shape[1],
- 'image/segmentation/class/encoded':
- tf.io.encode_png(label),
- }
- return sample_dict
-
-
-TFDS_ID_TO_DECODER_MAP = {
- 'cityscapes': CityScapesDecorder,
- 'cityscapes/semantic_segmentation': CityScapesDecorder,
- 'cityscapes/semantic_segmentation_extra': CityScapesDecorder,
-}
diff --git a/official/vision/beta/dataloaders/tfexample_utils.py b/official/vision/beta/dataloaders/tfexample_utils.py
deleted file mode 100644
index a66619bb604277914c8e182049ce383734dde993..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/tfexample_utils.py
+++ /dev/null
@@ -1,269 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Utility functions to create tf.Example and tf.SequnceExample for test.
-
-Example:video classification end-to-end test
-i.e. from reading input file to train and eval.
-
-```python
-class FooTrainTest(tf.test.TestCase):
-
- def setUp(self):
- super(TrainTest, self).setUp()
-
- # Write the fake tf.train.SequenceExample to file for test.
- data_dir = os.path.join(self.get_temp_dir(), 'data')
- tf.io.gfile.makedirs(data_dir)
- self._data_path = os.path.join(data_dir, 'data.tfrecord')
- examples = [
- tfexample_utils.make_video_test_example(
- image_shape=(36, 36, 3),
- audio_shape=(20, 128),
- label=random.randint(0, 100)) for _ in range(2)
- ]
- tfexample_utils.dump_to_tfrecord(self._data_path, tf_examples=examples)
-
- def test_foo(self):
- dataset = tf.data.TFRecordDataset(self._data_path)
- ...
-
-```
-
-"""
-import io
-from typing import Sequence, Union
-
-import numpy as np
-from PIL import Image
-import tensorflow as tf
-
-IMAGE_KEY = 'image/encoded'
-CLASSIFICATION_LABEL_KEY = 'image/class/label'
-LABEL_KEY = 'clip/label/index'
-AUDIO_KEY = 'features/audio'
-DUMP_SOURCE_ID = b'123'
-
-
-def encode_image(image_array: np.array, fmt: str) -> bytes:
- image = Image.fromarray(image_array)
- with io.BytesIO() as output:
- image.save(output, format=fmt)
- return output.getvalue()
-
-
-def make_image_bytes(shape: Sequence[int], fmt: str = 'JPEG') -> bytes:
- """Generates image and return bytes in specified format."""
- random_image = np.random.randint(0, 256, size=shape, dtype=np.uint8)
- return encode_image(random_image, fmt=fmt)
-
-
-def put_int64_to_context(seq_example: tf.train.SequenceExample,
- label: int = 0,
- key: str = LABEL_KEY):
- """Puts int64 to SequenceExample context with key."""
- seq_example.context.feature[key].int64_list.value[:] = [label]
-
-
-def put_bytes_list_to_feature(seq_example: tf.train.SequenceExample,
- raw_image_bytes: bytes,
- key: str = IMAGE_KEY,
- repeat_num: int = 2):
- """Puts bytes list to SequenceExample context with key."""
- for _ in range(repeat_num):
- seq_example.feature_lists.feature_list.get_or_create(
- key).feature.add().bytes_list.value[:] = [raw_image_bytes]
-
-
-def put_float_list_to_feature(seq_example: tf.train.SequenceExample,
- value: Sequence[Sequence[float]], key: str):
- """Puts float list to SequenceExample context with key."""
- for s in value:
- seq_example.feature_lists.feature_list.get_or_create(
- key).feature.add().float_list.value[:] = s
-
-
-def make_video_test_example(image_shape: Sequence[int] = (263, 320, 3),
- audio_shape: Sequence[int] = (10, 256),
- label: int = 42):
- """Generates data for testing video models (inc. RGB, audio, & label)."""
- raw_image_bytes = make_image_bytes(shape=image_shape)
- random_audio = np.random.normal(size=audio_shape).tolist()
-
- seq_example = tf.train.SequenceExample()
- put_int64_to_context(seq_example, label=label, key=LABEL_KEY)
- put_bytes_list_to_feature(
- seq_example, raw_image_bytes, key=IMAGE_KEY, repeat_num=4)
-
- put_float_list_to_feature(seq_example, value=random_audio, key=AUDIO_KEY)
- return seq_example
-
-
-def dump_to_tfrecord(record_file: str,
- tf_examples: Sequence[Union[tf.train.Example,
- tf.train.SequenceExample]]):
- """Writes serialized Example to TFRecord file with path."""
- with tf.io.TFRecordWriter(record_file) as writer:
- for tf_example in tf_examples:
- writer.write(tf_example.SerializeToString())
-
-
-def _encode_image(image_array: np.ndarray, fmt: str) -> bytes:
- """Util function to encode an image."""
- image = Image.fromarray(image_array)
- with io.BytesIO() as output:
- image.save(output, format=fmt)
- return output.getvalue()
-
-
-def create_classification_example(
- image_height: int,
- image_width: int,
- image_format: str = 'JPEG',
- is_multilabel: bool = False) -> tf.train.Example:
- """Creates image and labels for image classification input pipeline."""
- image = _encode_image(
- np.uint8(np.random.rand(image_height, image_width, 3) * 255),
- fmt=image_format)
- labels = [0, 1] if is_multilabel else [0]
- serialized_example = tf.train.Example(
- features=tf.train.Features(
- feature={
- IMAGE_KEY: (tf.train.Feature(
- bytes_list=tf.train.BytesList(value=[image]))),
- CLASSIFICATION_LABEL_KEY: (tf.train.Feature(
- int64_list=tf.train.Int64List(value=labels))),
- })).SerializeToString()
- return serialized_example
-
-
-def create_3d_image_test_example(image_height: int, image_width: int,
- image_volume: int,
- image_channel: int) -> tf.train.Example:
- """Creates 3D image and label."""
- images = np.random.rand(image_height, image_width, image_volume,
- image_channel)
- images = images.astype(np.float32)
-
- labels = np.random.randint(
- low=2, size=(image_height, image_width, image_volume, image_channel))
- labels = labels.astype(np.float32)
-
- feature = {
- IMAGE_KEY: (tf.train.Feature(
- bytes_list=tf.train.BytesList(value=[images.tobytes()]))),
- CLASSIFICATION_LABEL_KEY: (tf.train.Feature(
- bytes_list=tf.train.BytesList(value=[labels.tobytes()])))
- }
- return tf.train.Example(features=tf.train.Features(feature=feature))
-
-
-def create_detection_test_example(image_height: int, image_width: int,
- image_channel: int,
- num_instances: int) -> tf.train.Example:
- """Creates and returns a test example containing box and mask annotations.
-
- Args:
- image_height: The height of test image.
- image_width: The width of test image.
- image_channel: The channel of test image.
- num_instances: The number of object instances per image.
-
- Returns:
- A tf.train.Example for testing.
- """
- image = make_image_bytes([image_height, image_width, image_channel])
- if num_instances == 0:
- xmins = []
- xmaxs = []
- ymins = []
- ymaxs = []
- labels = []
- areas = []
- is_crowds = []
- masks = []
- labels_text = []
- else:
- xmins = list(np.random.rand(num_instances))
- xmaxs = list(np.random.rand(num_instances))
- ymins = list(np.random.rand(num_instances))
- ymaxs = list(np.random.rand(num_instances))
- labels_text = [b'class_1'] * num_instances
- labels = list(np.random.randint(100, size=num_instances))
- areas = [(xmax - xmin) * (ymax - ymin) * image_height * image_width
- for xmin, xmax, ymin, ymax in zip(xmins, xmaxs, ymins, ymaxs)]
- is_crowds = [0] * num_instances
- masks = []
- for _ in range(num_instances):
- mask = make_image_bytes([image_height, image_width], fmt='PNG')
- masks.append(mask)
- return tf.train.Example(
- features=tf.train.Features(
- feature={
- 'image/encoded': (tf.train.Feature(
- bytes_list=tf.train.BytesList(value=[image]))),
- 'image/source_id': (tf.train.Feature(
- bytes_list=tf.train.BytesList(value=[DUMP_SOURCE_ID]))),
- 'image/height': (tf.train.Feature(
- int64_list=tf.train.Int64List(value=[image_height]))),
- 'image/width': (tf.train.Feature(
- int64_list=tf.train.Int64List(value=[image_width]))),
- 'image/object/bbox/xmin': (tf.train.Feature(
- float_list=tf.train.FloatList(value=xmins))),
- 'image/object/bbox/xmax': (tf.train.Feature(
- float_list=tf.train.FloatList(value=xmaxs))),
- 'image/object/bbox/ymin': (tf.train.Feature(
- float_list=tf.train.FloatList(value=ymins))),
- 'image/object/bbox/ymax': (tf.train.Feature(
- float_list=tf.train.FloatList(value=ymaxs))),
- 'image/object/class/label': (tf.train.Feature(
- int64_list=tf.train.Int64List(value=labels))),
- 'image/object/class/text': (tf.train.Feature(
- bytes_list=tf.train.BytesList(value=labels_text))),
- 'image/object/is_crowd': (tf.train.Feature(
- int64_list=tf.train.Int64List(value=is_crowds))),
- 'image/object/area': (tf.train.Feature(
- float_list=tf.train.FloatList(value=areas))),
- 'image/object/mask': (tf.train.Feature(
- bytes_list=tf.train.BytesList(value=masks))),
- }))
-
-
-def create_segmentation_test_example(image_height: int, image_width: int,
- image_channel: int) -> tf.train.Example:
- """Creates and returns a test example containing mask annotations.
-
- Args:
- image_height: The height of test image.
- image_width: The width of test image.
- image_channel: The channel of test image.
-
- Returns:
- A tf.train.Example for testing.
- """
- image = make_image_bytes([image_height, image_width, image_channel])
- mask = make_image_bytes([image_height, image_width], fmt='PNG')
- return tf.train.Example(
- features=tf.train.Features(
- feature={
- 'image/encoded': (tf.train.Feature(
- bytes_list=tf.train.BytesList(value=[image]))),
- 'image/segmentation/class/encoded': (tf.train.Feature(
- bytes_list=tf.train.BytesList(value=[mask]))),
- 'image/height': (tf.train.Feature(
- int64_list=tf.train.Int64List(value=[image_height]))),
- 'image/width': (tf.train.Feature(
- int64_list=tf.train.Int64List(value=[image_width])))
- }))
diff --git a/official/vision/beta/dataloaders/utils.py b/official/vision/beta/dataloaders/utils.py
deleted file mode 100644
index a812c96456b75f9aa261bf571be9fddf65b3b1d0..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/utils.py
+++ /dev/null
@@ -1,69 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Data loader utils."""
-from typing import Dict
-
-# Import libraries
-import tensorflow as tf
-
-from official.vision.beta.ops import preprocess_ops
-
-
-def process_source_id(source_id: tf.Tensor) -> tf.Tensor:
- """Processes source_id to the right format.
-
- Args:
- source_id: A `tf.Tensor` that contains the source ID. It can be empty.
-
- Returns:
- A formatted source ID.
- """
- if source_id.dtype == tf.string:
- source_id = tf.strings.to_number(source_id, tf.int64)
- with tf.control_dependencies([source_id]):
- source_id = tf.cond(
- pred=tf.equal(tf.size(input=source_id), 0),
- true_fn=lambda: tf.cast(tf.constant(-1), tf.int64),
- false_fn=lambda: tf.identity(source_id))
- return source_id
-
-
-def pad_groundtruths_to_fixed_size(groundtruths: Dict[str, tf.Tensor],
- size: int) -> Dict[str, tf.Tensor]:
- """Pads the first dimension of groundtruths labels to the fixed size.
-
- Args:
- groundtruths: A dictionary of {`str`: `tf.Tensor`} that contains groundtruth
- annotations of `boxes`, `is_crowds`, `areas` and `classes`.
- size: An `int` that specifies the expected size of the first dimension of
- padded tensors.
-
- Returns:
- A dictionary of the same keys as input and padded tensors as values.
-
- """
- groundtruths['boxes'] = preprocess_ops.clip_or_pad_to_fixed_size(
- groundtruths['boxes'], size, -1)
- groundtruths['is_crowds'] = preprocess_ops.clip_or_pad_to_fixed_size(
- groundtruths['is_crowds'], size, 0)
- groundtruths['areas'] = preprocess_ops.clip_or_pad_to_fixed_size(
- groundtruths['areas'], size, -1)
- groundtruths['classes'] = preprocess_ops.clip_or_pad_to_fixed_size(
- groundtruths['classes'], size, -1)
- if 'attributes' in groundtruths:
- for k, v in groundtruths['attributes'].items():
- groundtruths['attributes'][k] = preprocess_ops.clip_or_pad_to_fixed_size(
- v, size, -1)
- return groundtruths
diff --git a/official/vision/beta/dataloaders/utils_test.py b/official/vision/beta/dataloaders/utils_test.py
deleted file mode 100644
index b3359f3819b200e43cb9751e39fd0d43b64d5046..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/utils_test.py
+++ /dev/null
@@ -1,71 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for dataloader utils functions."""
-
-# Import libraries
-
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.vision.beta.dataloaders import utils
-
-
-class UtilsTest(tf.test.TestCase, parameterized.TestCase):
-
- def test_process_empty_source_id(self):
- source_id = tf.constant([], dtype=tf.int64)
- source_id = tf.strings.as_string(source_id)
- self.assertEqual(-1, utils.process_source_id(source_id=source_id))
-
- @parameterized.parameters(
- ([128, 256], [128, 256]),
- ([128, 32, 16], [128, 32, 16]),
- )
- def test_process_source_id(self, source_id, expected_result):
- source_id = tf.constant(source_id, dtype=tf.int64)
- source_id = tf.strings.as_string(source_id)
- self.assertSequenceAlmostEqual(expected_result,
- utils.process_source_id(source_id=source_id))
-
- @parameterized.parameters(
- ([[10, 20, 30, 40]], [[100]], [[0]], 10, None),
- ([[0.1, 0.2, 0.5, 0.6]], [[0.5]], [[1]], 2, [[1.0, 2.0]]),
- )
- def test_pad_groundtruths_to_fixed_size(self, boxes, area, classes, size,
- attributes):
- groundtruths = {}
- groundtruths['boxes'] = tf.constant(boxes)
- groundtruths['is_crowds'] = tf.constant([[0]])
- groundtruths['areas'] = tf.constant(area)
- groundtruths['classes'] = tf.constant(classes)
- if attributes:
- groundtruths['attributes'] = {'depth': tf.constant(attributes)}
-
- actual_result = utils.pad_groundtruths_to_fixed_size(
- groundtruths=groundtruths, size=size)
-
- # Check that the first dimension is padded to the expected size.
- for key in actual_result:
- if key == 'attributes':
- for _, v in actual_result[key].items():
- pad_shape = v.shape[0]
- self.assertEqual(size, pad_shape)
- else:
- pad_shape = actual_result[key].shape[0]
- self.assertEqual(size, pad_shape)
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/dataloaders/video_input.py b/official/vision/beta/dataloaders/video_input.py
deleted file mode 100644
index 42102b37ff94dec271de981c99e4dc99c883e6bc..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/video_input.py
+++ /dev/null
@@ -1,393 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Parser for video and label datasets."""
-
-from typing import Dict, Optional, Tuple, Union
-
-from absl import logging
-import tensorflow as tf
-
-from official.vision.beta.configs import video_classification as exp_cfg
-from official.vision.beta.dataloaders import decoder
-from official.vision.beta.dataloaders import parser
-from official.vision.beta.ops import augment
-from official.vision.beta.ops import preprocess_ops_3d
-
-IMAGE_KEY = 'image/encoded'
-LABEL_KEY = 'clip/label/index'
-
-
-def process_image(image: tf.Tensor,
- is_training: bool = True,
- num_frames: int = 32,
- stride: int = 1,
- random_stride_range: int = 0,
- num_test_clips: int = 1,
- min_resize: int = 256,
- crop_size: int = 224,
- num_crops: int = 1,
- zero_centering_image: bool = False,
- min_aspect_ratio: float = 0.5,
- max_aspect_ratio: float = 2,
- min_area_ratio: float = 0.49,
- max_area_ratio: float = 1.0,
- augmenter: Optional[augment.ImageAugment] = None,
- seed: Optional[int] = None) -> tf.Tensor:
- """Processes a serialized image tensor.
-
- Args:
- image: Input Tensor of shape [timesteps] and type tf.string of serialized
- frames.
- is_training: Whether or not in training mode. If True, random sample, crop
- and left right flip is used.
- num_frames: Number of frames per subclip.
- stride: Temporal stride to sample frames.
- random_stride_range: An int indicating the min and max bounds to uniformly
- sample different strides from the video. E.g., a value of 1 with stride=2
- will uniformly sample a stride in {1, 2, 3} for each video in a batch.
- Only used enabled training for the purposes of frame-rate augmentation.
- Defaults to 0, which disables random sampling.
- num_test_clips: Number of test clips (1 by default). If more than 1, this
- will sample multiple linearly spaced clips within each video at test time.
- If 1, then a single clip in the middle of the video is sampled. The clips
- are aggreagated in the batch dimension.
- min_resize: Frames are resized so that min(height, width) is min_resize.
- crop_size: Final size of the frame after cropping the resized frames. Both
- height and width are the same.
- num_crops: Number of crops to perform on the resized frames.
- zero_centering_image: If True, frames are normalized to values in [-1, 1].
- If False, values in [0, 1].
- min_aspect_ratio: The minimum aspect range for cropping.
- max_aspect_ratio: The maximum aspect range for cropping.
- min_area_ratio: The minimum area range for cropping.
- max_area_ratio: The maximum area range for cropping.
- augmenter: Image augmenter to distort each image.
- seed: A deterministic seed to use when sampling.
-
- Returns:
- Processed frames. Tensor of shape
- [num_frames * num_test_clips, crop_size, crop_size, 3].
- """
- # Validate parameters.
- if is_training and num_test_clips != 1:
- logging.warning(
- '`num_test_clips` %d is ignored since `is_training` is `True`.',
- num_test_clips)
-
- if random_stride_range < 0:
- raise ValueError('Random stride range should be >= 0, got {}'.format(
- random_stride_range))
-
- # Temporal sampler.
- if is_training:
- if random_stride_range > 0:
- # Uniformly sample different frame-rates
- stride = tf.random.uniform(
- [],
- tf.maximum(stride - random_stride_range, 1),
- stride + random_stride_range,
- dtype=tf.int32)
-
- # Sample random clip.
- image = preprocess_ops_3d.sample_sequence(image, num_frames, True, stride,
- seed)
- elif num_test_clips > 1:
- # Sample linspace clips.
- image = preprocess_ops_3d.sample_linspace_sequence(image, num_test_clips,
- num_frames, stride)
- else:
- # Sample middle clip.
- image = preprocess_ops_3d.sample_sequence(image, num_frames, False, stride)
-
- # Decode JPEG string to tf.uint8.
- if image.dtype == tf.string:
- image = preprocess_ops_3d.decode_jpeg(image, 3)
-
- if is_training:
- # Standard image data augmentation: random resized crop and random flip.
- image = preprocess_ops_3d.random_crop_resize(
- image, crop_size, crop_size, num_frames, 3,
- (min_aspect_ratio, max_aspect_ratio),
- (min_area_ratio, max_area_ratio))
- image = preprocess_ops_3d.random_flip_left_right(image, seed)
-
- if augmenter is not None:
- image = augmenter.distort(image)
- else:
- # Resize images (resize happens only if necessary to save compute).
- image = preprocess_ops_3d.resize_smallest(image, min_resize)
- # Crop of the frames.
- image = preprocess_ops_3d.crop_image(image, crop_size, crop_size, False,
- num_crops)
-
- # Cast the frames in float32, normalizing according to zero_centering_image.
- return preprocess_ops_3d.normalize_image(image, zero_centering_image)
-
-
-def postprocess_image(image: tf.Tensor,
- is_training: bool = True,
- num_frames: int = 32,
- num_test_clips: int = 1,
- num_test_crops: int = 1) -> tf.Tensor:
- """Processes a batched Tensor of frames.
-
- The same parameters used in process should be used here.
-
- Args:
- image: Input Tensor of shape [batch, timesteps, height, width, 3].
- is_training: Whether or not in training mode. If True, random sample, crop
- and left right flip is used.
- num_frames: Number of frames per subclip.
- num_test_clips: Number of test clips (1 by default). If more than 1, this
- will sample multiple linearly spaced clips within each video at test time.
- If 1, then a single clip in the middle of the video is sampled. The clips
- are aggreagated in the batch dimension.
- num_test_crops: Number of test crops (1 by default). If more than 1, there
- are multiple crops for each clip at test time. If 1, there is a single
- central crop. The crops are aggreagated in the batch dimension.
-
- Returns:
- Processed frames. Tensor of shape
- [batch * num_test_clips * num_test_crops, num_frames, height, width, 3].
- """
- num_views = num_test_clips * num_test_crops
- if num_views > 1 and not is_training:
- # In this case, multiple views are merged together in batch dimenstion which
- # will be batch * num_views.
- image = tf.reshape(image, [-1, num_frames] + image.shape[2:].as_list())
-
- return image
-
-
-def process_label(label: tf.Tensor,
- one_hot_label: bool = True,
- num_classes: Optional[int] = None) -> tf.Tensor:
- """Processes label Tensor."""
- # Validate parameters.
- if one_hot_label and not num_classes:
- raise ValueError(
- '`num_classes` should be given when requesting one hot label.')
-
- # Cast to tf.int32.
- label = tf.cast(label, dtype=tf.int32)
-
- if one_hot_label:
- # Replace label index by one hot representation.
- label = tf.one_hot(label, num_classes)
- if len(label.shape.as_list()) > 1:
- label = tf.reduce_sum(label, axis=0)
- if num_classes == 1:
- # The trick for single label.
- label = 1 - label
-
- return label
-
-
-class Decoder(decoder.Decoder):
- """A tf.Example decoder for classification task."""
-
- def __init__(self, image_key: str = IMAGE_KEY, label_key: str = LABEL_KEY):
- self._context_description = {
- # One integer stored in context.
- label_key: tf.io.VarLenFeature(tf.int64),
- }
- self._sequence_description = {
- # Each image is a string encoding JPEG.
- image_key: tf.io.FixedLenSequenceFeature((), tf.string),
- }
-
- def add_feature(self, feature_name: str,
- feature_type: Union[tf.io.VarLenFeature,
- tf.io.FixedLenFeature,
- tf.io.FixedLenSequenceFeature]):
- self._sequence_description[feature_name] = feature_type
-
- def add_context(self, feature_name: str,
- feature_type: Union[tf.io.VarLenFeature,
- tf.io.FixedLenFeature,
- tf.io.FixedLenSequenceFeature]):
- self._context_description[feature_name] = feature_type
-
- def decode(self, serialized_example):
- """Parses a single tf.Example into image and label tensors."""
- result = {}
- context, sequences = tf.io.parse_single_sequence_example(
- serialized_example, self._context_description,
- self._sequence_description)
- result.update(context)
- result.update(sequences)
- for key, value in result.items():
- if isinstance(value, tf.SparseTensor):
- result[key] = tf.sparse.to_dense(value)
- return result
-
-
-class VideoTfdsDecoder(decoder.Decoder):
- """A tf.SequenceExample decoder for tfds video classification datasets."""
-
- def __init__(self, image_key: str = IMAGE_KEY, label_key: str = LABEL_KEY):
- self._image_key = image_key
- self._label_key = label_key
-
- def decode(self, features):
- """Decode the TFDS FeatureDict.
-
- Args:
- features: features from TFDS video dataset.
- See https://www.tensorflow.org/datasets/catalog/ucf101 for example.
- Returns:
- Dict of tensors.
- """
- sample_dict = {
- self._image_key: features['video'],
- self._label_key: features['label'],
- }
- return sample_dict
-
-
-class Parser(parser.Parser):
- """Parses a video and label dataset."""
-
- def __init__(self,
- input_params: exp_cfg.DataConfig,
- image_key: str = IMAGE_KEY,
- label_key: str = LABEL_KEY):
- self._num_frames = input_params.feature_shape[0]
- self._stride = input_params.temporal_stride
- self._random_stride_range = input_params.random_stride_range
- self._num_test_clips = input_params.num_test_clips
- self._min_resize = input_params.min_image_size
- self._crop_size = input_params.feature_shape[1]
- self._num_crops = input_params.num_test_crops
- self._one_hot_label = input_params.one_hot
- self._num_classes = input_params.num_classes
- self._image_key = image_key
- self._label_key = label_key
- self._dtype = tf.dtypes.as_dtype(input_params.dtype)
- self._output_audio = input_params.output_audio
- self._min_aspect_ratio = input_params.aug_min_aspect_ratio
- self._max_aspect_ratio = input_params.aug_max_aspect_ratio
- self._min_area_ratio = input_params.aug_min_area_ratio
- self._max_area_ratio = input_params.aug_max_area_ratio
- if self._output_audio:
- self._audio_feature = input_params.audio_feature
- self._audio_shape = input_params.audio_feature_shape
-
- self._augmenter = None
- if input_params.aug_type is not None:
- aug_type = input_params.aug_type
- if aug_type == 'autoaug':
- logging.info('Using AutoAugment.')
- self._augmenter = augment.AutoAugment()
- elif aug_type == 'randaug':
- logging.info('Using RandAugment.')
- self._augmenter = augment.RandAugment()
- else:
- raise ValueError('Augmentation policy {} is not supported.'.format(
- aug_type))
-
- def _parse_train_data(
- self, decoded_tensors: Dict[str, tf.Tensor]
- ) -> Tuple[Dict[str, tf.Tensor], tf.Tensor]:
- """Parses data for training."""
- # Process image and label.
- image = decoded_tensors[self._image_key]
- image = process_image(
- image=image,
- is_training=True,
- num_frames=self._num_frames,
- stride=self._stride,
- random_stride_range=self._random_stride_range,
- num_test_clips=self._num_test_clips,
- min_resize=self._min_resize,
- crop_size=self._crop_size,
- min_aspect_ratio=self._min_aspect_ratio,
- max_aspect_ratio=self._max_aspect_ratio,
- min_area_ratio=self._min_area_ratio,
- max_area_ratio=self._max_area_ratio,
- augmenter=self._augmenter)
- image = tf.cast(image, dtype=self._dtype)
-
- features = {'image': image}
-
- label = decoded_tensors[self._label_key]
- label = process_label(label, self._one_hot_label, self._num_classes)
-
- if self._output_audio:
- audio = decoded_tensors[self._audio_feature]
- audio = tf.cast(audio, dtype=self._dtype)
- # TODO(yeqing): synchronize audio/video sampling. Especially randomness.
- audio = preprocess_ops_3d.sample_sequence(
- audio, self._audio_shape[0], random=False, stride=1)
- audio = tf.ensure_shape(audio, self._audio_shape)
- features['audio'] = audio
-
- return features, label
-
- def _parse_eval_data(
- self, decoded_tensors: Dict[str, tf.Tensor]
- ) -> Tuple[Dict[str, tf.Tensor], tf.Tensor]:
- """Parses data for evaluation."""
- image = decoded_tensors[self._image_key]
- image = process_image(
- image=image,
- is_training=False,
- num_frames=self._num_frames,
- stride=self._stride,
- num_test_clips=self._num_test_clips,
- min_resize=self._min_resize,
- crop_size=self._crop_size,
- num_crops=self._num_crops)
- image = tf.cast(image, dtype=self._dtype)
- features = {'image': image}
-
- label = decoded_tensors[self._label_key]
- label = process_label(label, self._one_hot_label, self._num_classes)
-
- if self._output_audio:
- audio = decoded_tensors[self._audio_feature]
- audio = tf.cast(audio, dtype=self._dtype)
- audio = preprocess_ops_3d.sample_sequence(
- audio, self._audio_shape[0], random=False, stride=1)
- audio = tf.ensure_shape(audio, self._audio_shape)
- features['audio'] = audio
-
- return features, label
-
-
-class PostBatchProcessor(object):
- """Processes a video and label dataset which is batched."""
-
- def __init__(self, input_params: exp_cfg.DataConfig):
- self._is_training = input_params.is_training
-
- self._num_frames = input_params.feature_shape[0]
- self._num_test_clips = input_params.num_test_clips
- self._num_test_crops = input_params.num_test_crops
-
- def __call__(self, features: Dict[str, tf.Tensor],
- label: tf.Tensor) -> Tuple[Dict[str, tf.Tensor], tf.Tensor]:
- """Parses a single tf.Example into image and label tensors."""
- for key in ['image']:
- if key in features:
- features[key] = postprocess_image(
- image=features[key],
- is_training=self._is_training,
- num_frames=self._num_frames,
- num_test_clips=self._num_test_clips,
- num_test_crops=self._num_test_crops)
-
- return features, label
diff --git a/official/vision/beta/dataloaders/video_input_test.py b/official/vision/beta/dataloaders/video_input_test.py
deleted file mode 100644
index b5e0a2a8535b6f750ffd0eb4b57e693895d1f4d7..0000000000000000000000000000000000000000
--- a/official/vision/beta/dataloaders/video_input_test.py
+++ /dev/null
@@ -1,195 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-
-import io
-
-# Import libraries
-import numpy as np
-from PIL import Image
-import tensorflow as tf
-import tensorflow_datasets as tfds
-
-from official.vision.beta.configs import video_classification as exp_cfg
-from official.vision.beta.dataloaders import video_input
-
-
-AUDIO_KEY = 'features/audio'
-
-
-def fake_seq_example():
- # Create fake data.
- random_image = np.random.randint(0, 256, size=(263, 320, 3), dtype=np.uint8)
- random_image = Image.fromarray(random_image)
- label = 42
- with io.BytesIO() as buffer:
- random_image.save(buffer, format='JPEG')
- raw_image_bytes = buffer.getvalue()
-
- seq_example = tf.train.SequenceExample()
- seq_example.feature_lists.feature_list.get_or_create(
- video_input.IMAGE_KEY).feature.add().bytes_list.value[:] = [
- raw_image_bytes
- ]
- seq_example.feature_lists.feature_list.get_or_create(
- video_input.IMAGE_KEY).feature.add().bytes_list.value[:] = [
- raw_image_bytes
- ]
- seq_example.context.feature[video_input.LABEL_KEY].int64_list.value[:] = [
- label
- ]
-
- random_audio = np.random.normal(size=(10, 256)).tolist()
- for s in random_audio:
- seq_example.feature_lists.feature_list.get_or_create(
- AUDIO_KEY).feature.add().float_list.value[:] = s
- return seq_example, label
-
-
-class DecoderTest(tf.test.TestCase):
- """A tf.SequenceExample decoder for the video classification task."""
-
- def test_decoder(self):
- decoder = video_input.Decoder()
-
- seq_example, label = fake_seq_example()
- serialized_example = seq_example.SerializeToString()
-
- decoded_tensors = decoder.decode(tf.convert_to_tensor(serialized_example))
- results = tf.nest.map_structure(lambda x: x.numpy(), decoded_tensors)
- self.assertCountEqual([video_input.IMAGE_KEY, video_input.LABEL_KEY],
- results.keys())
- self.assertEqual(label, results[video_input.LABEL_KEY])
-
- def test_decode_audio(self):
- decoder = video_input.Decoder()
- decoder.add_feature(AUDIO_KEY, tf.io.VarLenFeature(dtype=tf.float32))
-
- seq_example, label = fake_seq_example()
- serialized_example = seq_example.SerializeToString()
-
- decoded_tensors = decoder.decode(tf.convert_to_tensor(serialized_example))
- results = tf.nest.map_structure(lambda x: x.numpy(), decoded_tensors)
- self.assertCountEqual(
- [video_input.IMAGE_KEY, video_input.LABEL_KEY, AUDIO_KEY],
- results.keys())
- self.assertEqual(label, results[video_input.LABEL_KEY])
- self.assertEqual(results[AUDIO_KEY].shape, (10, 256))
-
- def test_tfds_decode(self):
- with tfds.testing.mock_data(num_examples=1):
- dataset = tfds.load('ucf101', split='train').take(1)
- data = next(iter(dataset))
-
- decoder = video_input.VideoTfdsDecoder()
- decoded_tensors = decoder.decode(data)
- self.assertContainsSubset([video_input.LABEL_KEY, video_input.IMAGE_KEY],
- decoded_tensors.keys())
-
-
-class VideoAndLabelParserTest(tf.test.TestCase):
-
- def test_video_input(self):
- params = exp_cfg.kinetics600(is_training=True)
- params.feature_shape = (2, 224, 224, 3)
- params.min_image_size = 224
-
- decoder = video_input.Decoder()
- parser = video_input.Parser(params).parse_fn(params.is_training)
-
- seq_example, label = fake_seq_example()
-
- input_tensor = tf.constant(seq_example.SerializeToString())
- decoded_tensors = decoder.decode(input_tensor)
- output_tensor = parser(decoded_tensors)
- image_features, label = output_tensor
- image = image_features['image']
-
- self.assertAllEqual(image.shape, (2, 224, 224, 3))
- self.assertAllEqual(label.shape, (600,))
-
- def test_video_audio_input(self):
- params = exp_cfg.kinetics600(is_training=True)
- params.feature_shape = (2, 224, 224, 3)
- params.min_image_size = 224
- params.output_audio = True
- params.audio_feature = AUDIO_KEY
- params.audio_feature_shape = (15, 256)
-
- decoder = video_input.Decoder()
- decoder.add_feature(params.audio_feature,
- tf.io.VarLenFeature(dtype=tf.float32))
- parser = video_input.Parser(params).parse_fn(params.is_training)
-
- seq_example, label = fake_seq_example()
-
- input_tensor = tf.constant(seq_example.SerializeToString())
- decoded_tensors = decoder.decode(input_tensor)
- output_tensor = parser(decoded_tensors)
- features, label = output_tensor
- image = features['image']
- audio = features['audio']
-
- self.assertAllEqual(image.shape, (2, 224, 224, 3))
- self.assertAllEqual(label.shape, (600,))
- self.assertEqual(audio.shape, (15, 256))
-
- def test_video_input_random_stride(self):
- params = exp_cfg.kinetics600(is_training=True)
- params.feature_shape = (2, 224, 224, 3)
- params.min_image_size = 224
-
- params.temporal_stride = 2
- params.random_stride_range = 1
-
- decoder = video_input.Decoder()
- parser = video_input.Parser(params).parse_fn(params.is_training)
-
- seq_example, label = fake_seq_example()
-
- input_tensor = tf.constant(seq_example.SerializeToString())
- decoded_tensors = decoder.decode(input_tensor)
- output_tensor = parser(decoded_tensors)
- image_features, label = output_tensor
- image = image_features['image']
-
- self.assertAllEqual(image.shape, (2, 224, 224, 3))
- self.assertAllEqual(label.shape, (600,))
-
- def test_video_input_augmentation_returns_shape(self):
- params = exp_cfg.kinetics600(is_training=True)
- params.feature_shape = (2, 224, 224, 3)
- params.min_image_size = 224
-
- params.temporal_stride = 2
- params.aug_type = 'autoaug'
-
- decoder = video_input.Decoder()
- parser = video_input.Parser(params).parse_fn(params.is_training)
-
- seq_example, label = fake_seq_example()
-
- input_tensor = tf.constant(seq_example.SerializeToString())
- decoded_tensors = decoder.decode(input_tensor)
- output_tensor = parser(decoded_tensors)
- image_features, label = output_tensor
- image = image_features['image']
-
- self.assertAllEqual(image.shape, (2, 224, 224, 3))
- self.assertAllEqual(label.shape, (600,))
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/evaluation/__init__.py b/official/vision/beta/evaluation/__init__.py
deleted file mode 100644
index 310bfb28f0c252bc4a4485325059bff28c5250c2..0000000000000000000000000000000000000000
--- a/official/vision/beta/evaluation/__init__.py
+++ /dev/null
@@ -1,14 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
diff --git a/official/vision/beta/evaluation/coco_evaluator.py b/official/vision/beta/evaluation/coco_evaluator.py
deleted file mode 100644
index de5691dad11bef61f3f0646c9b4da42541890072..0000000000000000000000000000000000000000
--- a/official/vision/beta/evaluation/coco_evaluator.py
+++ /dev/null
@@ -1,336 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""The COCO-style evaluator.
-
-The following snippet demonstrates the use of interfaces:
-
- evaluator = COCOEvaluator(...)
- for _ in range(num_evals):
- for _ in range(num_batches_per_eval):
- predictions, groundtruth = predictor.predict(...) # pop a batch.
- evaluator.update_state(groundtruths, predictions)
- evaluator.result() # finish one full eval and reset states.
-
-See also: https://github.com/cocodataset/cocoapi/
-"""
-
-import atexit
-import tempfile
-# Import libraries
-from absl import logging
-import numpy as np
-from pycocotools import cocoeval
-import six
-import tensorflow as tf
-
-from official.vision.beta.evaluation import coco_utils
-
-
-class COCOEvaluator(object):
- """COCO evaluation metric class."""
-
- def __init__(self,
- annotation_file,
- include_mask,
- need_rescale_bboxes=True,
- per_category_metrics=False):
- """Constructs COCO evaluation class.
-
- The class provides the interface to COCO metrics_fn. The
- _update_op() takes detections from each image and push them to
- self.detections. The _evaluate() loads a JSON file in COCO annotation format
- as the groundtruths and runs COCO evaluation.
-
- Args:
- annotation_file: a JSON file that stores annotations of the eval dataset.
- If `annotation_file` is None, groundtruth annotations will be loaded
- from the dataloader.
- include_mask: a boolean to indicate whether or not to include the mask
- eval.
- need_rescale_bboxes: If true bboxes in `predictions` will be rescaled back
- to absolute values (`image_info` is needed in this case).
- per_category_metrics: Whether to return per category metrics.
- """
- if annotation_file:
- if annotation_file.startswith('gs://'):
- _, local_val_json = tempfile.mkstemp(suffix='.json')
- tf.io.gfile.remove(local_val_json)
-
- tf.io.gfile.copy(annotation_file, local_val_json)
- atexit.register(tf.io.gfile.remove, local_val_json)
- else:
- local_val_json = annotation_file
- self._coco_gt = coco_utils.COCOWrapper(
- eval_type=('mask' if include_mask else 'box'),
- annotation_file=local_val_json)
- self._annotation_file = annotation_file
- self._include_mask = include_mask
- self._per_category_metrics = per_category_metrics
- self._metric_names = [
- 'AP', 'AP50', 'AP75', 'APs', 'APm', 'APl', 'ARmax1', 'ARmax10',
- 'ARmax100', 'ARs', 'ARm', 'ARl'
- ]
- self._required_prediction_fields = [
- 'source_id', 'num_detections', 'detection_classes', 'detection_scores',
- 'detection_boxes'
- ]
- self._need_rescale_bboxes = need_rescale_bboxes
- if self._need_rescale_bboxes:
- self._required_prediction_fields.append('image_info')
- self._required_groundtruth_fields = [
- 'source_id', 'height', 'width', 'classes', 'boxes'
- ]
- if self._include_mask:
- mask_metric_names = ['mask_' + x for x in self._metric_names]
- self._metric_names.extend(mask_metric_names)
- self._required_prediction_fields.extend(['detection_masks'])
- self._required_groundtruth_fields.extend(['masks'])
-
- self.reset_states()
-
- @property
- def name(self):
- return 'coco_metric'
-
- def reset_states(self):
- """Resets internal states for a fresh run."""
- self._predictions = {}
- if not self._annotation_file:
- self._groundtruths = {}
-
- def result(self):
- """Evaluates detection results, and reset_states."""
- metric_dict = self.evaluate()
- # Cleans up the internal variables in order for a fresh eval next time.
- self.reset_states()
- return metric_dict
-
- def evaluate(self):
- """Evaluates with detections from all images with COCO API.
-
- Returns:
- coco_metric: float numpy array with shape [24] representing the
- coco-style evaluation metrics (box and mask).
- """
- if not self._annotation_file:
- logging.info('There is no annotation_file in COCOEvaluator.')
- gt_dataset = coco_utils.convert_groundtruths_to_coco_dataset(
- self._groundtruths)
- coco_gt = coco_utils.COCOWrapper(
- eval_type=('mask' if self._include_mask else 'box'),
- gt_dataset=gt_dataset)
- else:
- logging.info('Using annotation file: %s', self._annotation_file)
- coco_gt = self._coco_gt
- coco_predictions = coco_utils.convert_predictions_to_coco_annotations(
- self._predictions)
- coco_dt = coco_gt.loadRes(predictions=coco_predictions)
- image_ids = [ann['image_id'] for ann in coco_predictions]
-
- coco_eval = cocoeval.COCOeval(coco_gt, coco_dt, iouType='bbox')
- coco_eval.params.imgIds = image_ids
- coco_eval.evaluate()
- coco_eval.accumulate()
- coco_eval.summarize()
- coco_metrics = coco_eval.stats
-
- if self._include_mask:
- mcoco_eval = cocoeval.COCOeval(coco_gt, coco_dt, iouType='segm')
- mcoco_eval.params.imgIds = image_ids
- mcoco_eval.evaluate()
- mcoco_eval.accumulate()
- mcoco_eval.summarize()
- mask_coco_metrics = mcoco_eval.stats
-
- if self._include_mask:
- metrics = np.hstack((coco_metrics, mask_coco_metrics))
- else:
- metrics = coco_metrics
-
- metrics_dict = {}
- for i, name in enumerate(self._metric_names):
- metrics_dict[name] = metrics[i].astype(np.float32)
-
- # Adds metrics per category.
- if self._per_category_metrics:
- metrics_dict.update(self._retrieve_per_category_metrics(coco_eval))
-
- if self._include_mask:
- metrics_dict.update(self._retrieve_per_category_metrics(
- mcoco_eval, prefix='mask'))
-
- return metrics_dict
-
- def _retrieve_per_category_metrics(self, coco_eval, prefix=''):
- """Retrieves and per-category metrics and retuns them in a dict.
-
- Args:
- coco_eval: a cocoeval.COCOeval object containing evaluation data.
- prefix: str, A string used to prefix metric names.
-
- Returns:
- metrics_dict: A dictionary with per category metrics.
- """
-
- metrics_dict = {}
- if prefix:
- prefix = prefix + ' '
-
- if hasattr(coco_eval, 'category_stats'):
- for category_index, category_id in enumerate(coco_eval.params.catIds):
- if self._annotation_file:
- coco_category = self._coco_gt.cats[category_id]
- # if 'name' is available use it, otherwise use `id`
- category_display_name = coco_category.get('name', category_id)
- else:
- category_display_name = category_id
-
- metrics_dict[prefix + 'Precision mAP ByCategory/{}'.format(
- category_display_name
- )] = coco_eval.category_stats[0][category_index].astype(np.float32)
- metrics_dict[prefix + 'Precision mAP ByCategory@50IoU/{}'.format(
- category_display_name
- )] = coco_eval.category_stats[1][category_index].astype(np.float32)
- metrics_dict[prefix + 'Precision mAP ByCategory@75IoU/{}'.format(
- category_display_name
- )] = coco_eval.category_stats[2][category_index].astype(np.float32)
- metrics_dict[prefix + 'Precision mAP ByCategory (small) /{}'.format(
- category_display_name
- )] = coco_eval.category_stats[3][category_index].astype(np.float32)
- metrics_dict[prefix + 'Precision mAP ByCategory (medium) /{}'.format(
- category_display_name
- )] = coco_eval.category_stats[4][category_index].astype(np.float32)
- metrics_dict[prefix + 'Precision mAP ByCategory (large) /{}'.format(
- category_display_name
- )] = coco_eval.category_stats[5][category_index].astype(np.float32)
- metrics_dict[prefix + 'Recall AR@1 ByCategory/{}'.format(
- category_display_name
- )] = coco_eval.category_stats[6][category_index].astype(np.float32)
- metrics_dict[prefix + 'Recall AR@10 ByCategory/{}'.format(
- category_display_name
- )] = coco_eval.category_stats[7][category_index].astype(np.float32)
- metrics_dict[prefix + 'Recall AR@100 ByCategory/{}'.format(
- category_display_name
- )] = coco_eval.category_stats[8][category_index].astype(np.float32)
- metrics_dict[prefix + 'Recall AR (small) ByCategory/{}'.format(
- category_display_name
- )] = coco_eval.category_stats[9][category_index].astype(np.float32)
- metrics_dict[prefix + 'Recall AR (medium) ByCategory/{}'.format(
- category_display_name
- )] = coco_eval.category_stats[10][category_index].astype(np.float32)
- metrics_dict[prefix + 'Recall AR (large) ByCategory/{}'.format(
- category_display_name
- )] = coco_eval.category_stats[11][category_index].astype(np.float32)
-
- return metrics_dict
-
- def _process_predictions(self, predictions):
- image_scale = np.tile(predictions['image_info'][:, 2:3, :], (1, 1, 2))
- predictions['detection_boxes'] = (
- predictions['detection_boxes'].astype(np.float32))
- predictions['detection_boxes'] /= image_scale
- if 'detection_outer_boxes' in predictions:
- predictions['detection_outer_boxes'] = (
- predictions['detection_outer_boxes'].astype(np.float32))
- predictions['detection_outer_boxes'] /= image_scale
-
- def _convert_to_numpy(self, groundtruths, predictions):
- """Converts tesnors to numpy arrays."""
- if groundtruths:
- labels = tf.nest.map_structure(lambda x: x.numpy(), groundtruths)
- numpy_groundtruths = {}
- for key, val in labels.items():
- if isinstance(val, tuple):
- val = np.concatenate(val)
- numpy_groundtruths[key] = val
- else:
- numpy_groundtruths = groundtruths
-
- if predictions:
- outputs = tf.nest.map_structure(lambda x: x.numpy(), predictions)
- numpy_predictions = {}
- for key, val in outputs.items():
- if isinstance(val, tuple):
- val = np.concatenate(val)
- numpy_predictions[key] = val
- else:
- numpy_predictions = predictions
-
- return numpy_groundtruths, numpy_predictions
-
- def update_state(self, groundtruths, predictions):
- """Update and aggregate detection results and groundtruth data.
-
- Args:
- groundtruths: a dictionary of Tensors including the fields below.
- See also different parsers under `../dataloader` for more details.
- Required fields:
- - source_id: a numpy array of int or string of shape [batch_size].
- - height: a numpy array of int of shape [batch_size].
- - width: a numpy array of int of shape [batch_size].
- - num_detections: a numpy array of int of shape [batch_size].
- - boxes: a numpy array of float of shape [batch_size, K, 4].
- - classes: a numpy array of int of shape [batch_size, K].
- Optional fields:
- - is_crowds: a numpy array of int of shape [batch_size, K]. If the
- field is absent, it is assumed that this instance is not crowd.
- - areas: a numy array of float of shape [batch_size, K]. If the
- field is absent, the area is calculated using either boxes or
- masks depending on which one is available.
- - masks: a numpy array of float of shape
- [batch_size, K, mask_height, mask_width],
- predictions: a dictionary of tensors including the fields below.
- See different parsers under `../dataloader` for more details.
- Required fields:
- - source_id: a numpy array of int or string of shape [batch_size].
- - image_info [if `need_rescale_bboxes` is True]: a numpy array of
- float of shape [batch_size, 4, 2].
- - num_detections: a numpy array of
- int of shape [batch_size].
- - detection_boxes: a numpy array of float of shape [batch_size, K, 4].
- - detection_classes: a numpy array of int of shape [batch_size, K].
- - detection_scores: a numpy array of float of shape [batch_size, K].
- Optional fields:
- - detection_masks: a numpy array of float of shape
- [batch_size, K, mask_height, mask_width].
- Raises:
- ValueError: if the required prediction or groundtruth fields are not
- present in the incoming `predictions` or `groundtruths`.
- """
- groundtruths, predictions = self._convert_to_numpy(groundtruths,
- predictions)
- for k in self._required_prediction_fields:
- if k not in predictions:
- raise ValueError(
- 'Missing the required key `{}` in predictions!'.format(k))
- if self._need_rescale_bboxes:
- self._process_predictions(predictions)
- for k, v in six.iteritems(predictions):
- if k not in self._predictions:
- self._predictions[k] = [v]
- else:
- self._predictions[k].append(v)
-
- if not self._annotation_file:
- assert groundtruths
- for k in self._required_groundtruth_fields:
- if k not in groundtruths:
- raise ValueError(
- 'Missing the required key `{}` in groundtruths!'.format(k))
- for k, v in six.iteritems(groundtruths):
- if k not in self._groundtruths:
- self._groundtruths[k] = [v]
- else:
- self._groundtruths[k].append(v)
diff --git a/official/vision/beta/evaluation/coco_utils.py b/official/vision/beta/evaluation/coco_utils.py
deleted file mode 100644
index e968fa9436d2a79d32244885701d354ac6d9f6c7..0000000000000000000000000000000000000000
--- a/official/vision/beta/evaluation/coco_utils.py
+++ /dev/null
@@ -1,400 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Util functions related to pycocotools and COCO eval."""
-
-import copy
-import json
-
-# Import libraries
-
-from absl import logging
-import numpy as np
-from PIL import Image
-from pycocotools import coco
-from pycocotools import mask as mask_api
-import six
-import tensorflow as tf
-
-from official.common import dataset_fn
-from official.vision.beta.dataloaders import tf_example_decoder
-from official.vision.beta.ops import box_ops
-from official.vision.beta.ops import mask_ops
-
-
-class COCOWrapper(coco.COCO):
- """COCO wrapper class.
-
- This class wraps COCO API object, which provides the following additional
- functionalities:
- 1. Support string type image id.
- 2. Support loading the groundtruth dataset using the external annotation
- dictionary.
- 3. Support loading the prediction results using the external annotation
- dictionary.
- """
-
- def __init__(self, eval_type='box', annotation_file=None, gt_dataset=None):
- """Instantiates a COCO-style API object.
-
- Args:
- eval_type: either 'box' or 'mask'.
- annotation_file: a JSON file that stores annotations of the eval dataset.
- This is required if `gt_dataset` is not provided.
- gt_dataset: the groundtruth eval datatset in COCO API format.
- """
- if ((annotation_file and gt_dataset) or
- ((not annotation_file) and (not gt_dataset))):
- raise ValueError('One and only one of `annotation_file` and `gt_dataset` '
- 'needs to be specified.')
-
- if eval_type not in ['box', 'mask']:
- raise ValueError('The `eval_type` can only be either `box` or `mask`.')
-
- coco.COCO.__init__(self, annotation_file=annotation_file)
- self._eval_type = eval_type
- if gt_dataset:
- self.dataset = gt_dataset
- self.createIndex()
-
- def loadRes(self, predictions):
- """Loads result file and return a result api object.
-
- Args:
- predictions: a list of dictionary each representing an annotation in COCO
- format. The required fields are `image_id`, `category_id`, `score`,
- `bbox`, `segmentation`.
-
- Returns:
- res: result COCO api object.
-
- Raises:
- ValueError: if the set of image id from predctions is not the subset of
- the set of image id of the groundtruth dataset.
- """
- res = coco.COCO()
- res.dataset['images'] = copy.deepcopy(self.dataset['images'])
- res.dataset['categories'] = copy.deepcopy(self.dataset['categories'])
-
- image_ids = [ann['image_id'] for ann in predictions]
- if set(image_ids) != (set(image_ids) & set(self.getImgIds())):
- raise ValueError('Results do not correspond to the current dataset!')
- for ann in predictions:
- x1, x2, y1, y2 = [ann['bbox'][0], ann['bbox'][0] + ann['bbox'][2],
- ann['bbox'][1], ann['bbox'][1] + ann['bbox'][3]]
- if self._eval_type == 'box':
- ann['area'] = ann['bbox'][2] * ann['bbox'][3]
- ann['segmentation'] = [
- [x1, y1, x1, y2, x2, y2, x2, y1]]
- elif self._eval_type == 'mask':
- ann['area'] = mask_api.area(ann['segmentation'])
-
- res.dataset['annotations'] = copy.deepcopy(predictions)
- res.createIndex()
- return res
-
-
-def convert_predictions_to_coco_annotations(predictions):
- """Converts a batch of predictions to annotations in COCO format.
-
- Args:
- predictions: a dictionary of lists of numpy arrays including the following
- fields. K below denotes the maximum number of instances per image.
- Required fields:
- - source_id: a list of numpy arrays of int or string of shape
- [batch_size].
- - num_detections: a list of numpy arrays of int of shape [batch_size].
- - detection_boxes: a list of numpy arrays of float of shape
- [batch_size, K, 4], where coordinates are in the original image
- space (not the scaled image space).
- - detection_classes: a list of numpy arrays of int of shape
- [batch_size, K].
- - detection_scores: a list of numpy arrays of float of shape
- [batch_size, K].
- Optional fields:
- - detection_masks: a list of numpy arrays of float of shape
- [batch_size, K, mask_height, mask_width].
-
- Returns:
- coco_predictions: prediction in COCO annotation format.
- """
- coco_predictions = []
- num_batches = len(predictions['source_id'])
- max_num_detections = predictions['detection_classes'][0].shape[1]
- use_outer_box = 'detection_outer_boxes' in predictions
- for i in range(num_batches):
- predictions['detection_boxes'][i] = box_ops.yxyx_to_xywh(
- predictions['detection_boxes'][i])
- if use_outer_box:
- predictions['detection_outer_boxes'][i] = box_ops.yxyx_to_xywh(
- predictions['detection_outer_boxes'][i])
- mask_boxes = predictions['detection_outer_boxes']
- else:
- mask_boxes = predictions['detection_boxes']
-
- batch_size = predictions['source_id'][i].shape[0]
- for j in range(batch_size):
- if 'detection_masks' in predictions:
- image_masks = mask_ops.paste_instance_masks(
- predictions['detection_masks'][i][j],
- mask_boxes[i][j],
- int(predictions['image_info'][i][j, 0, 0]),
- int(predictions['image_info'][i][j, 0, 1]))
- binary_masks = (image_masks > 0.0).astype(np.uint8)
- encoded_masks = [
- mask_api.encode(np.asfortranarray(binary_mask))
- for binary_mask in list(binary_masks)]
- for k in range(max_num_detections):
- ann = {}
- ann['image_id'] = predictions['source_id'][i][j]
- ann['category_id'] = predictions['detection_classes'][i][j, k]
- ann['bbox'] = predictions['detection_boxes'][i][j, k]
- ann['score'] = predictions['detection_scores'][i][j, k]
- if 'detection_masks' in predictions:
- ann['segmentation'] = encoded_masks[k]
- coco_predictions.append(ann)
-
- for i, ann in enumerate(coco_predictions):
- ann['id'] = i + 1
-
- return coco_predictions
-
-
-def convert_groundtruths_to_coco_dataset(groundtruths, label_map=None):
- """Converts groundtruths to the dataset in COCO format.
-
- Args:
- groundtruths: a dictionary of numpy arrays including the fields below.
- Note that each element in the list represent the number for a single
- example without batch dimension. K below denotes the actual number of
- instances for each image.
- Required fields:
- - source_id: a list of numpy arrays of int or string of shape
- [batch_size].
- - height: a list of numpy arrays of int of shape [batch_size].
- - width: a list of numpy arrays of int of shape [batch_size].
- - num_detections: a list of numpy arrays of int of shape [batch_size].
- - boxes: a list of numpy arrays of float of shape [batch_size, K, 4],
- where coordinates are in the original image space (not the
- normalized coordinates).
- - classes: a list of numpy arrays of int of shape [batch_size, K].
- Optional fields:
- - is_crowds: a list of numpy arrays of int of shape [batch_size, K]. If
- th field is absent, it is assumed that this instance is not crowd.
- - areas: a list of numy arrays of float of shape [batch_size, K]. If the
- field is absent, the area is calculated using either boxes or
- masks depending on which one is available.
- - masks: a list of numpy arrays of string of shape [batch_size, K],
- label_map: (optional) a dictionary that defines items from the category id
- to the category name. If `None`, collect the category mappping from the
- `groundtruths`.
-
- Returns:
- coco_groundtruths: the groundtruth dataset in COCO format.
- """
- source_ids = np.concatenate(groundtruths['source_id'], axis=0)
- heights = np.concatenate(groundtruths['height'], axis=0)
- widths = np.concatenate(groundtruths['width'], axis=0)
- gt_images = [{'id': int(i), 'height': int(h), 'width': int(w)} for i, h, w
- in zip(source_ids, heights, widths)]
-
- gt_annotations = []
- num_batches = len(groundtruths['source_id'])
- for i in range(num_batches):
- logging.info(
- 'convert_groundtruths_to_coco_dataset: Processing annotation %d', i)
- max_num_instances = groundtruths['classes'][i].shape[1]
- batch_size = groundtruths['source_id'][i].shape[0]
- for j in range(batch_size):
- num_instances = groundtruths['num_detections'][i][j]
- if num_instances > max_num_instances:
- logging.warning(
- 'num_groundtruths is larger than max_num_instances, %d v.s. %d',
- num_instances, max_num_instances)
- num_instances = max_num_instances
- for k in range(int(num_instances)):
- ann = {}
- ann['image_id'] = int(groundtruths['source_id'][i][j])
- if 'is_crowds' in groundtruths:
- ann['iscrowd'] = int(groundtruths['is_crowds'][i][j, k])
- else:
- ann['iscrowd'] = 0
- ann['category_id'] = int(groundtruths['classes'][i][j, k])
- boxes = groundtruths['boxes'][i]
- ann['bbox'] = [
- float(boxes[j, k, 1]),
- float(boxes[j, k, 0]),
- float(boxes[j, k, 3] - boxes[j, k, 1]),
- float(boxes[j, k, 2] - boxes[j, k, 0])]
- if 'areas' in groundtruths:
- ann['area'] = float(groundtruths['areas'][i][j, k])
- else:
- ann['area'] = float(
- (boxes[j, k, 3] - boxes[j, k, 1]) *
- (boxes[j, k, 2] - boxes[j, k, 0]))
- if 'masks' in groundtruths:
- if isinstance(groundtruths['masks'][i][j, k], tf.Tensor):
- mask = Image.open(
- six.BytesIO(groundtruths['masks'][i][j, k].numpy()))
- width, height = mask.size
- np_mask = (
- np.array(mask.getdata()).reshape(height,
- width).astype(np.uint8))
- else:
- mask = Image.open(
- six.BytesIO(groundtruths['masks'][i][j, k]))
- width, height = mask.size
- np_mask = (
- np.array(mask.getdata()).reshape(height,
- width).astype(np.uint8))
- np_mask[np_mask > 0] = 255
- encoded_mask = mask_api.encode(np.asfortranarray(np_mask))
- ann['segmentation'] = encoded_mask
- # Ensure the content of `counts` is JSON serializable string.
- if 'counts' in ann['segmentation']:
- ann['segmentation']['counts'] = six.ensure_str(
- ann['segmentation']['counts'])
- if 'areas' not in groundtruths:
- ann['area'] = mask_api.area(encoded_mask)
- gt_annotations.append(ann)
-
- for i, ann in enumerate(gt_annotations):
- ann['id'] = i + 1
-
- if label_map:
- gt_categories = [{'id': i, 'name': label_map[i]} for i in label_map]
- else:
- category_ids = [gt['category_id'] for gt in gt_annotations]
- gt_categories = [{'id': i} for i in set(category_ids)]
-
- gt_dataset = {
- 'images': gt_images,
- 'categories': gt_categories,
- 'annotations': copy.deepcopy(gt_annotations),
- }
- return gt_dataset
-
-
-class COCOGroundtruthGenerator:
- """Generates the groundtruth annotations from a single example."""
-
- def __init__(self, file_pattern, file_type, num_examples, include_mask,
- regenerate_source_id=False):
- self._file_pattern = file_pattern
- self._num_examples = num_examples
- self._include_mask = include_mask
- self._dataset_fn = dataset_fn.pick_dataset_fn(file_type)
- self._regenerate_source_id = regenerate_source_id
-
- def _parse_single_example(self, example):
- """Parses a single serialized tf.Example proto.
-
- Args:
- example: a serialized tf.Example proto string.
-
- Returns:
- A dictionary of groundtruth with the following fields:
- source_id: a scalar tensor of int64 representing the image source_id.
- height: a scalar tensor of int64 representing the image height.
- width: a scalar tensor of int64 representing the image width.
- boxes: a float tensor of shape [K, 4], representing the groundtruth
- boxes in absolute coordinates with respect to the original image size.
- classes: a int64 tensor of shape [K], representing the class labels of
- each instances.
- is_crowds: a bool tensor of shape [K], indicating whether the instance
- is crowd.
- areas: a float tensor of shape [K], indicating the area of each
- instance.
- masks: a string tensor of shape [K], containing the bytes of the png
- mask of each instance.
- """
- decoder = tf_example_decoder.TfExampleDecoder(
- include_mask=self._include_mask,
- regenerate_source_id=self._regenerate_source_id)
- decoded_tensors = decoder.decode(example)
-
- image = decoded_tensors['image']
- image_size = tf.shape(image)[0:2]
- boxes = box_ops.denormalize_boxes(
- decoded_tensors['groundtruth_boxes'], image_size)
-
- source_id = decoded_tensors['source_id']
- if source_id.dtype is tf.string:
- source_id = tf.strings.to_number(source_id, out_type=tf.int64)
-
- groundtruths = {
- 'source_id': source_id,
- 'height': decoded_tensors['height'],
- 'width': decoded_tensors['width'],
- 'num_detections': tf.shape(decoded_tensors['groundtruth_classes'])[0],
- 'boxes': boxes,
- 'classes': decoded_tensors['groundtruth_classes'],
- 'is_crowds': decoded_tensors['groundtruth_is_crowd'],
- 'areas': decoded_tensors['groundtruth_area'],
- }
- if self._include_mask:
- groundtruths.update({
- 'masks': decoded_tensors['groundtruth_instance_masks_png'],
- })
- return groundtruths
-
- def _build_pipeline(self):
- """Builds data pipeline to generate groundtruth annotations."""
- dataset = tf.data.Dataset.list_files(self._file_pattern, shuffle=False)
- dataset = dataset.interleave(
- map_func=lambda filename: self._dataset_fn(filename).prefetch(1),
- cycle_length=None,
- num_parallel_calls=tf.data.experimental.AUTOTUNE)
-
- dataset = dataset.take(self._num_examples)
- dataset = dataset.map(self._parse_single_example,
- num_parallel_calls=tf.data.experimental.AUTOTUNE)
- dataset = dataset.batch(1, drop_remainder=False)
- dataset = dataset.prefetch(tf.data.experimental.AUTOTUNE)
- return dataset
-
- def __call__(self):
- return self._build_pipeline()
-
-
-def scan_and_generator_annotation_file(file_pattern: str,
- file_type: str,
- num_samples: int,
- include_mask: bool,
- annotation_file: str,
- regenerate_source_id: bool = False):
- """Scans and generate the COCO-style annotation JSON file given a dataset."""
- groundtruth_generator = COCOGroundtruthGenerator(
- file_pattern, file_type, num_samples, include_mask, regenerate_source_id)
- generate_annotation_file(groundtruth_generator, annotation_file)
-
-
-def generate_annotation_file(groundtruth_generator,
- annotation_file):
- """Generates COCO-style annotation JSON file given a groundtruth generator."""
- groundtruths = {}
- logging.info('Loading groundtruth annotations from dataset to memory...')
- for i, groundtruth in enumerate(groundtruth_generator()):
- logging.info('generate_annotation_file: Processing annotation %d', i)
- for k, v in six.iteritems(groundtruth):
- if k not in groundtruths:
- groundtruths[k] = [v]
- else:
- groundtruths[k].append(v)
- gt_dataset = convert_groundtruths_to_coco_dataset(groundtruths)
-
- logging.info('Saving groundtruth annotations to the JSON file...')
- with tf.io.gfile.GFile(annotation_file, 'w') as f:
- f.write(json.dumps(gt_dataset))
- logging.info('Done saving the JSON file...')
diff --git a/official/vision/beta/evaluation/coco_utils_test.py b/official/vision/beta/evaluation/coco_utils_test.py
deleted file mode 100644
index 9179c7dda0de835f11f5174112b438fb44e5d963..0000000000000000000000000000000000000000
--- a/official/vision/beta/evaluation/coco_utils_test.py
+++ /dev/null
@@ -1,49 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for coco_utils."""
-
-import os
-
-import tensorflow as tf
-
-from official.vision.beta.dataloaders import tfexample_utils
-from official.vision.beta.evaluation import coco_utils
-
-
-class CocoUtilsTest(tf.test.TestCase):
-
- def test_scan_and_generator_annotation_file(self):
- num_samples = 10
- example = tfexample_utils.create_detection_test_example(
- image_height=512, image_width=512, image_channel=3, num_instances=10)
- tf_examples = [example] * num_samples
- data_file = os.path.join(self.create_tempdir(), 'test.tfrecord')
- tfexample_utils.dump_to_tfrecord(
- record_file=data_file, tf_examples=tf_examples)
- annotation_file = os.path.join(self.create_tempdir(), 'annotation.json')
-
- coco_utils.scan_and_generator_annotation_file(
- file_pattern=data_file,
- file_type='tfrecord',
- num_samples=num_samples,
- include_mask=True,
- annotation_file=annotation_file)
- self.assertTrue(
- tf.io.gfile.exists(annotation_file),
- msg='Annotation file {annotation_file} does not exists.')
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/evaluation/iou.py b/official/vision/beta/evaluation/iou.py
deleted file mode 100644
index 1dabd4af372af593d16197d24427f1b1a37c348e..0000000000000000000000000000000000000000
--- a/official/vision/beta/evaluation/iou.py
+++ /dev/null
@@ -1,129 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""IOU Metrics used for semantic segmentation models."""
-
-import numpy as np
-import tensorflow as tf
-
-
-class PerClassIoU(tf.keras.metrics.Metric):
- """Computes the per-class Intersection-Over-Union metric.
-
- Mean Intersection-Over-Union is a common evaluation metric for semantic image
- segmentation, which first computes the IOU for each semantic class.
- IOU is defined as follows:
- IOU = true_positive / (true_positive + false_positive + false_negative).
- The predictions are accumulated in a confusion matrix, weighted by
- `sample_weight` and the metric is then calculated from it.
-
- If `sample_weight` is `None`, weights default to 1.
- Use `sample_weight` of 0 to mask values.
-
- Example:
-
- >>> # cm = [[1, 1],
- >>> # [1, 1]]
- >>> # sum_row = [2, 2], sum_col = [2, 2], true_positives = [1, 1]
- >>> # iou = true_positives / (sum_row + sum_col - true_positives))
- >>> # result = [(1 / (2 + 2 - 1), 1 / (2 + 2 - 1)] = 0.33
- >>> m = tf.keras.metrics.MeanIoU(num_classes=2)
- >>> m.update_state([0, 0, 1, 1], [0, 1, 0, 1])
- >>> m.result().numpy()
- [0.33333334, 0.33333334]
-
- """
-
- def __init__(self, num_classes, name=None, dtype=None):
- """Initializes `PerClassIoU`.
-
- Args:
- num_classes: The possible number of labels the prediction task can have.
- This value must be provided, since a confusion matrix of dimension =
- [num_classes, num_classes] will be allocated.
- name: (Optional) string name of the metric instance.
- dtype: (Optional) data type of the metric result.
-
- """
-
- super(PerClassIoU, self).__init__(name=name, dtype=dtype)
- self.num_classes = num_classes
-
- # Variable to accumulate the predictions in the confusion matrix.
- self.total_cm = self.add_weight(
- 'total_confusion_matrix',
- shape=(num_classes, num_classes),
- initializer=tf.compat.v1.zeros_initializer)
-
- def update_state(self, y_true, y_pred, sample_weight=None):
- """Accumulates the confusion matrix statistics.
-
- Args:
- y_true: The ground truth values.
- y_pred: The predicted values.
- sample_weight: Optional weighting of each example. Defaults to 1. Can be a
- `Tensor` whose rank is either 0, or the same rank as `y_true`, and must
- be broadcastable to `y_true`.
-
- Returns:
- IOU per class.
- """
-
- y_true = tf.cast(y_true, self._dtype)
- y_pred = tf.cast(y_pred, self._dtype)
-
- # Flatten the input if its rank > 1.
- if y_pred.shape.ndims > 1:
- y_pred = tf.reshape(y_pred, [-1])
-
- if y_true.shape.ndims > 1:
- y_true = tf.reshape(y_true, [-1])
-
- if sample_weight is not None:
- sample_weight = tf.cast(sample_weight, self._dtype)
- if sample_weight.shape.ndims > 1:
- sample_weight = tf.reshape(sample_weight, [-1])
-
- # Accumulate the prediction to current confusion matrix.
- current_cm = tf.math.confusion_matrix(
- y_true,
- y_pred,
- self.num_classes,
- weights=sample_weight,
- dtype=self._dtype)
- return self.total_cm.assign_add(current_cm)
-
- def result(self):
- """Compute the mean intersection-over-union via the confusion matrix."""
- sum_over_row = tf.cast(
- tf.reduce_sum(self.total_cm, axis=0), dtype=self._dtype)
- sum_over_col = tf.cast(
- tf.reduce_sum(self.total_cm, axis=1), dtype=self._dtype)
- true_positives = tf.cast(
- tf.linalg.tensor_diag_part(self.total_cm), dtype=self._dtype)
-
- # sum_over_row + sum_over_col =
- # 2 * true_positives + false_positives + false_negatives.
- denominator = sum_over_row + sum_over_col - true_positives
-
- return tf.math.divide_no_nan(true_positives, denominator)
-
- def reset_states(self):
- tf.keras.backend.set_value(
- self.total_cm, np.zeros((self.num_classes, self.num_classes)))
-
- def get_config(self):
- config = {'num_classes': self.num_classes}
- base_config = super(PerClassIoU, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
diff --git a/official/vision/beta/evaluation/iou_test.py b/official/vision/beta/evaluation/iou_test.py
deleted file mode 100644
index e9cd2b39e42a60d490e0e9296f0fbaadedd7e93c..0000000000000000000000000000000000000000
--- a/official/vision/beta/evaluation/iou_test.py
+++ /dev/null
@@ -1,115 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for iou metric."""
-
-import tensorflow as tf
-
-from official.vision.beta.evaluation import iou
-
-
-class MeanIoUTest(tf.test.TestCase):
-
- def test_config(self):
- m_obj = iou.PerClassIoU(num_classes=2, name='per_class_iou')
- self.assertEqual(m_obj.name, 'per_class_iou')
- self.assertEqual(m_obj.num_classes, 2)
-
- m_obj2 = iou.PerClassIoU.from_config(m_obj.get_config())
- self.assertEqual(m_obj2.name, 'per_class_iou')
- self.assertEqual(m_obj2.num_classes, 2)
-
- def test_unweighted(self):
- y_pred = [0, 1, 0, 1]
- y_true = [0, 0, 1, 1]
-
- m_obj = iou.PerClassIoU(num_classes=2)
-
- result = m_obj(y_true, y_pred)
-
- # cm = [[1, 1],
- # [1, 1]]
- # sum_row = [2, 2], sum_col = [2, 2], true_positives = [1, 1]
- # iou = true_positives / (sum_row + sum_col - true_positives))
- expected_result = [1 / (2 + 2 - 1), 1 / (2 + 2 - 1)]
- self.assertAllClose(expected_result, result, atol=1e-3)
-
- def test_weighted(self):
- y_pred = tf.constant([0, 1, 0, 1], dtype=tf.float32)
- y_true = tf.constant([0, 0, 1, 1])
- sample_weight = tf.constant([0.2, 0.3, 0.4, 0.1])
-
- m_obj = iou.PerClassIoU(num_classes=2)
-
- result = m_obj(y_true, y_pred, sample_weight=sample_weight)
-
- # cm = [[0.2, 0.3],
- # [0.4, 0.1]]
- # sum_row = [0.6, 0.4], sum_col = [0.5, 0.5], true_positives = [0.2, 0.1]
- # iou = true_positives / (sum_row + sum_col - true_positives))
- expected_result = [0.2 / (0.6 + 0.5 - 0.2), 0.1 / (0.4 + 0.5 - 0.1)]
- self.assertAllClose(expected_result, result, atol=1e-3)
-
- def test_multi_dim_input(self):
- y_pred = tf.constant([[0, 1], [0, 1]], dtype=tf.float32)
- y_true = tf.constant([[0, 0], [1, 1]])
- sample_weight = tf.constant([[0.2, 0.3], [0.4, 0.1]])
-
- m_obj = iou.PerClassIoU(num_classes=2)
-
- result = m_obj(y_true, y_pred, sample_weight=sample_weight)
-
- # cm = [[0.2, 0.3],
- # [0.4, 0.1]]
- # sum_row = [0.6, 0.4], sum_col = [0.5, 0.5], true_positives = [0.2, 0.1]
- # iou = true_positives / (sum_row + sum_col - true_positives))
- expected_result = [0.2 / (0.6 + 0.5 - 0.2), 0.1 / (0.4 + 0.5 - 0.1)]
- self.assertAllClose(expected_result, result, atol=1e-3)
-
- def test_zero_valid_entries(self):
- m_obj = iou.PerClassIoU(num_classes=2)
- self.assertAllClose(m_obj.result(), [0, 0], atol=1e-3)
-
- def test_zero_and_non_zero_entries(self):
- y_pred = tf.constant([1], dtype=tf.float32)
- y_true = tf.constant([1])
-
- m_obj = iou.PerClassIoU(num_classes=2)
- result = m_obj(y_true, y_pred)
-
- # cm = [[0, 0],
- # [0, 1]]
- # sum_row = [0, 1], sum_col = [0, 1], true_positives = [0, 1]
- # iou = true_positives / (sum_row + sum_col - true_positives))
- expected_result = [0, 1 / (1 + 1 - 1)]
- self.assertAllClose(expected_result, result, atol=1e-3)
-
- def test_update_state_annd_result(self):
- y_pred = [0, 1, 0, 1]
- y_true = [0, 0, 1, 1]
-
- m_obj = iou.PerClassIoU(num_classes=2)
-
- m_obj.update_state(y_true, y_pred)
- result = m_obj.result()
-
- # cm = [[1, 1],
- # [1, 1]]
- # sum_row = [2, 2], sum_col = [2, 2], true_positives = [1, 1]
- # iou = true_positives / (sum_row + sum_col - true_positives))
- expected_result = [1 / (2 + 2 - 1), 1 / (2 + 2 - 1)]
- self.assertAllClose(expected_result, result, atol=1e-3)
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/evaluation/panoptic_quality.py b/official/vision/beta/evaluation/panoptic_quality.py
deleted file mode 100644
index 0546fb959b171a24e6c94c1fc9a8c0b1c2bc37a9..0000000000000000000000000000000000000000
--- a/official/vision/beta/evaluation/panoptic_quality.py
+++ /dev/null
@@ -1,294 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Implementation of the Panoptic Quality metric.
-
-Panoptic Quality is an instance-based metric for evaluating the task of
-image parsing, aka panoptic segmentation.
-
-Please see the paper for details:
-"Panoptic Segmentation", Alexander Kirillov, Kaiming He, Ross Girshick,
-Carsten Rother and Piotr Dollar. arXiv:1801.00868, 2018.
-
-Note that this metric class is branched from
-https://github.com/tensorflow/models/blob/master/research/deeplab/evaluation/panoptic_quality.py
-"""
-
-import collections
-import numpy as np
-
-_EPSILON = 1e-10
-
-
-def realdiv_maybe_zero(x, y):
- """Element-wise x / y where y may contain zeros, for those returns 0 too."""
- return np.where(
- np.less(np.abs(y), _EPSILON), np.zeros_like(x), np.divide(x, y))
-
-
-def _ids_to_counts(id_array):
- """Given a numpy array, a mapping from each unique entry to its count."""
- ids, counts = np.unique(id_array, return_counts=True)
- return dict(zip(ids, counts))
-
-
-class PanopticQuality:
- """Metric class for Panoptic Quality.
-
- "Panoptic Segmentation" by Alexander Kirillov, Kaiming He, Ross Girshick,
- Carsten Rother, Piotr Dollar.
- https://arxiv.org/abs/1801.00868
- """
-
- def __init__(self, num_categories, ignored_label, max_instances_per_category,
- offset):
- """Initialization for PanopticQualityMetric.
-
- Args:
- num_categories: The number of segmentation categories (or "classes" in the
- dataset.
- ignored_label: A category id that is ignored in evaluation, e.g. the void
- label as defined in COCO panoptic segmentation dataset.
- max_instances_per_category: The maximum number of instances for each
- category. Used in ensuring unique instance labels.
- offset: The maximum number of unique labels. This is used, by multiplying
- the ground-truth labels, to generate unique ids for individual regions
- of overlap between groundtruth and predicted segments.
- """
- self.num_categories = num_categories
- self.ignored_label = ignored_label
- self.max_instances_per_category = max_instances_per_category
- self.offset = offset
- self.reset()
-
- def _naively_combine_labels(self, category_mask, instance_mask):
- """Naively creates a combined label array from categories and instances."""
- return (category_mask.astype(np.uint32) * self.max_instances_per_category +
- instance_mask.astype(np.uint32))
-
- def compare_and_accumulate(self, groundtruths, predictions):
- """Compares predicted segmentation with groundtruth, accumulates its metric.
-
- It is not assumed that instance ids are unique across different categories.
- See for example combine_semantic_and_instance_predictions.py in official
- PanopticAPI evaluation code for issues to consider when fusing category
- and instance labels.
-
- Instances ids of the ignored category have the meaning that id 0 is "void"
- and remaining ones are crowd instances.
-
- Args:
- groundtruths: A dictionary contains groundtruth labels. It should contain
- the following fields.
- - category_mask: A 2D numpy uint16 array of groundtruth per-pixel
- category labels.
- - instance_mask: A 2D numpy uint16 array of groundtruth instance labels.
- predictions: A dictionary contains the model outputs. It should contain
- the following fields.
- - category_array: A 2D numpy uint16 array of predicted per-pixel
- category labels.
- - instance_array: A 2D numpy uint16 array of predicted instance labels.
- """
- groundtruth_category_mask = groundtruths['category_mask']
- groundtruth_instance_mask = groundtruths['instance_mask']
- predicted_category_mask = predictions['category_mask']
- predicted_instance_mask = predictions['instance_mask']
-
- # First, combine the category and instance labels so that every unique
- # value for (category, instance) is assigned a unique integer label.
- pred_segment_id = self._naively_combine_labels(predicted_category_mask,
- predicted_instance_mask)
- gt_segment_id = self._naively_combine_labels(groundtruth_category_mask,
- groundtruth_instance_mask)
-
- # Pre-calculate areas for all groundtruth and predicted segments.
- gt_segment_areas = _ids_to_counts(gt_segment_id)
- pred_segment_areas = _ids_to_counts(pred_segment_id)
-
- # We assume there is only one void segment and it has instance id = 0.
- void_segment_id = self.ignored_label * self.max_instances_per_category
-
- # There may be other ignored groundtruth segments with instance id > 0, find
- # those ids using the unique segment ids extracted with the area computation
- # above.
- ignored_segment_ids = {
- gt_segment_id for gt_segment_id in gt_segment_areas
- if (gt_segment_id //
- self.max_instances_per_category) == self.ignored_label
- }
-
- # Next, combine the groundtruth and predicted labels. Dividing up the pixels
- # based on which groundtruth segment and which predicted segment they belong
- # to, this will assign a different 32-bit integer label to each choice
- # of (groundtruth segment, predicted segment), encoded as
- # gt_segment_id * offset + pred_segment_id.
- intersection_id_array = (
- gt_segment_id.astype(np.uint64) * self.offset +
- pred_segment_id.astype(np.uint64))
-
- # For every combination of (groundtruth segment, predicted segment) with a
- # non-empty intersection, this counts the number of pixels in that
- # intersection.
- intersection_areas = _ids_to_counts(intersection_id_array)
-
- # Helper function that computes the area of the overlap between a predicted
- # segment and the ground-truth void/ignored segment.
- def prediction_void_overlap(pred_segment_id):
- void_intersection_id = void_segment_id * self.offset + pred_segment_id
- return intersection_areas.get(void_intersection_id, 0)
-
- # Compute overall ignored overlap.
- def prediction_ignored_overlap(pred_segment_id):
- total_ignored_overlap = 0
- for ignored_segment_id in ignored_segment_ids:
- intersection_id = ignored_segment_id * self.offset + pred_segment_id
- total_ignored_overlap += intersection_areas.get(intersection_id, 0)
- return total_ignored_overlap
-
- # Sets that are populated with which segments groundtruth/predicted segments
- # have been matched with overlapping predicted/groundtruth segments
- # respectively.
- gt_matched = set()
- pred_matched = set()
-
- # Calculate IoU per pair of intersecting segments of the same category.
- for intersection_id, intersection_area in intersection_areas.items():
- gt_segment_id = int(intersection_id // self.offset)
- pred_segment_id = int(intersection_id % self.offset)
-
- gt_category = int(gt_segment_id // self.max_instances_per_category)
- pred_category = int(pred_segment_id // self.max_instances_per_category)
- if gt_category != pred_category:
- continue
-
- # Union between the groundtruth and predicted segments being compared does
- # not include the portion of the predicted segment that consists of
- # groundtruth "void" pixels.
- union = (
- gt_segment_areas[gt_segment_id] +
- pred_segment_areas[pred_segment_id] - intersection_area -
- prediction_void_overlap(pred_segment_id))
- iou = intersection_area / union
- if iou > 0.5:
- self.tp_per_class[gt_category] += 1
- self.iou_per_class[gt_category] += iou
- gt_matched.add(gt_segment_id)
- pred_matched.add(pred_segment_id)
-
- # Count false negatives for each category.
- for gt_segment_id in gt_segment_areas:
- if gt_segment_id in gt_matched:
- continue
- category = gt_segment_id // self.max_instances_per_category
- # Failing to detect a void segment is not a false negative.
- if category == self.ignored_label:
- continue
- self.fn_per_class[category] += 1
-
- # Count false positives for each category.
- for pred_segment_id in pred_segment_areas:
- if pred_segment_id in pred_matched:
- continue
- # A false positive is not penalized if is mostly ignored in the
- # groundtruth.
- if (prediction_ignored_overlap(pred_segment_id) /
- pred_segment_areas[pred_segment_id]) > 0.5:
- continue
- category = pred_segment_id // self.max_instances_per_category
- self.fp_per_class[category] += 1
-
- def _valid_categories(self):
- """Categories with a "valid" value for the metric, have > 0 instances.
-
- We will ignore the `ignore_label` class and other classes which have
- `tp + fn + fp = 0`.
-
- Returns:
- Boolean array of shape `[num_categories]`.
- """
- valid_categories = np.not_equal(
- self.tp_per_class + self.fn_per_class + self.fp_per_class, 0)
- if self.ignored_label >= 0 and self.ignored_label < self.num_categories:
- valid_categories[self.ignored_label] = False
- return valid_categories
-
- def result_per_category(self):
- """For supported metrics, return individual per-category metric values.
-
- Returns:
- A dictionary contains all per-class metrics, each metrics is a numpy array
- of shape `[self.num_categories]`, where index `i` is the metrics value
- over only that category.
- """
- sq_per_class = realdiv_maybe_zero(self.iou_per_class, self.tp_per_class)
- rq_per_class = realdiv_maybe_zero(
- self.tp_per_class,
- self.tp_per_class + 0.5 * self.fn_per_class + 0.5 * self.fp_per_class)
- return {
- 'sq_per_class': sq_per_class,
- 'rq_per_class': rq_per_class,
- 'pq_per_class': np.multiply(sq_per_class, rq_per_class)
- }
-
- def result(self, is_thing=None):
- """Computes and returns the detailed metric results over all comparisons.
-
- Args:
- is_thing: A boolean array of length `num_categories`. The entry
- `is_thing[category_id]` is True iff that category is a "thing" category
- instead of "stuff."
-
- Returns:
- A dictionary with a breakdown of metrics and/or metric factors by things,
- stuff, and all categories.
- """
- results = self.result_per_category()
- valid_categories = self._valid_categories()
- # If known, break down which categories are valid _and_ things/stuff.
- category_sets = collections.OrderedDict()
- category_sets['All'] = valid_categories
- if is_thing is not None:
- category_sets['Things'] = np.logical_and(valid_categories, is_thing)
- category_sets['Stuff'] = np.logical_and(valid_categories,
- np.logical_not(is_thing))
-
- for category_set_name, in_category_set in category_sets.items():
- if np.any(in_category_set):
- results.update({
- f'{category_set_name}_pq':
- np.mean(results['pq_per_class'][in_category_set]),
- f'{category_set_name}_sq':
- np.mean(results['sq_per_class'][in_category_set]),
- f'{category_set_name}_rq':
- np.mean(results['rq_per_class'][in_category_set]),
- # The number of categories in this subset.
- f'{category_set_name}_num_categories':
- np.sum(in_category_set.astype(np.int32)),
- })
- else:
- results[category_set_name] = {
- f'{category_set_name}_pq': 0.,
- f'{category_set_name}_sq': 0.,
- f'{category_set_name}_rq': 0.,
- f'{category_set_name}_num_categories': 0
- }
-
- return results
-
- def reset(self):
- """Resets the accumulation to the metric class's state at initialization."""
- self.iou_per_class = np.zeros(self.num_categories, dtype=np.float64)
- self.tp_per_class = np.zeros(self.num_categories, dtype=np.float64)
- self.fn_per_class = np.zeros(self.num_categories, dtype=np.float64)
- self.fp_per_class = np.zeros(self.num_categories, dtype=np.float64)
diff --git a/official/vision/beta/evaluation/panoptic_quality_evaluator.py b/official/vision/beta/evaluation/panoptic_quality_evaluator.py
deleted file mode 100644
index c9775680c0a29658e014ca7fe6096f456bb71c92..0000000000000000000000000000000000000000
--- a/official/vision/beta/evaluation/panoptic_quality_evaluator.py
+++ /dev/null
@@ -1,184 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""The panoptic quality evaluator.
-
-The following snippet demonstrates the use of interfaces:
-
- evaluator = PanopticQualityEvaluator(...)
- for _ in range(num_evals):
- for _ in range(num_batches_per_eval):
- predictions, groundtruth = predictor.predict(...) # pop a batch.
- evaluator.update_state(groundtruths, predictions)
- evaluator.result() # finish one full eval and reset states.
-
-See also: https://github.com/cocodataset/cocoapi/
-"""
-
-import numpy as np
-import tensorflow as tf
-
-from official.vision.beta.evaluation import panoptic_quality
-
-
-def _crop_padding(mask, image_info):
- """Crops padded masks to match original image shape.
-
- Args:
- mask: a padded mask tensor.
- image_info: a tensor that holds information about original and preprocessed
- images.
- Returns:
- cropped and padded masks: tf.Tensor
- """
- image_shape = tf.cast(image_info[0, :], tf.int32)
- mask = tf.image.crop_to_bounding_box(
- tf.expand_dims(mask, axis=-1), 0, 0,
- image_shape[0], image_shape[1])
- return tf.expand_dims(mask[:, :, 0], axis=0)
-
-
-class PanopticQualityEvaluator:
- """Panoptic Quality metric class."""
-
- def __init__(self, num_categories, ignored_label, max_instances_per_category,
- offset, is_thing=None, rescale_predictions=False):
- """Constructs Panoptic Quality evaluation class.
-
- The class provides the interface to Panoptic Quality metrics_fn.
-
- Args:
- num_categories: The number of segmentation categories (or "classes" in the
- dataset.
- ignored_label: A category id that is ignored in evaluation, e.g. the void
- label as defined in COCO panoptic segmentation dataset.
- max_instances_per_category: The maximum number of instances for each
- category. Used in ensuring unique instance labels.
- offset: The maximum number of unique labels. This is used, by multiplying
- the ground-truth labels, to generate unique ids for individual regions
- of overlap between groundtruth and predicted segments.
- is_thing: A boolean array of length `num_categories`. The entry
- `is_thing[category_id]` is True iff that category is a "thing" category
- instead of "stuff." Default to `None`, and it means categories are not
- classified into these two categories.
- rescale_predictions: `bool`, whether to scale back prediction to original
- image sizes. If True, groundtruths['image_info'] is used to rescale
- predictions.
- """
- self._pq_metric_module = panoptic_quality.PanopticQuality(
- num_categories, ignored_label, max_instances_per_category, offset)
- self._is_thing = is_thing
- self._rescale_predictions = rescale_predictions
- self._required_prediction_fields = ['category_mask', 'instance_mask']
- self._required_groundtruth_fields = ['category_mask', 'instance_mask']
- self.reset_states()
-
- @property
- def name(self):
- return 'panoptic_quality'
-
- def reset_states(self):
- """Resets internal states for a fresh run."""
- self._pq_metric_module.reset()
-
- def result(self):
- """Evaluates detection results, and reset_states."""
- results = self._pq_metric_module.result(self._is_thing)
- self.reset_states()
- return results
-
- def _convert_to_numpy(self, groundtruths, predictions):
- """Converts tesnors to numpy arrays."""
- if groundtruths:
- labels = tf.nest.map_structure(lambda x: x.numpy(), groundtruths)
- numpy_groundtruths = {}
- for key, val in labels.items():
- if isinstance(val, tuple):
- val = np.concatenate(val)
- numpy_groundtruths[key] = val
- else:
- numpy_groundtruths = groundtruths
-
- if predictions:
- outputs = tf.nest.map_structure(lambda x: x.numpy(), predictions)
- numpy_predictions = {}
- for key, val in outputs.items():
- if isinstance(val, tuple):
- val = np.concatenate(val)
- numpy_predictions[key] = val
- else:
- numpy_predictions = predictions
-
- return numpy_groundtruths, numpy_predictions
-
- def update_state(self, groundtruths, predictions):
- """Update and aggregate detection results and groundtruth data.
-
- Args:
- groundtruths: a dictionary of Tensors including the fields below. See also
- different parsers under `../dataloader` for more details.
- Required fields:
- - category_mask: a numpy array of uint16 of shape [batch_size, H, W].
- - instance_mask: a numpy array of uint16 of shape [batch_size, H, W].
- - image_info: [batch, 4, 2], a tensor that holds information about
- original and preprocessed images. Each entry is in the format of
- [[original_height, original_width], [input_height, input_width],
- [y_scale, x_scale], [y_offset, x_offset]], where [desired_height,
- desired_width] is the actual scaled image size, and [y_scale, x_scale]
- is the scaling factor, which is the ratio of scaled dimension /
- original dimension.
- predictions: a dictionary of tensors including the fields below. See
- different parsers under `../dataloader` for more details.
- Required fields:
- - category_mask: a numpy array of uint16 of shape [batch_size, H, W].
- - instance_mask: a numpy array of uint16 of shape [batch_size, H, W].
-
- Raises:
- ValueError: if the required prediction or groundtruth fields are not
- present in the incoming `predictions` or `groundtruths`.
- """
- groundtruths, predictions = self._convert_to_numpy(groundtruths,
- predictions)
- for k in self._required_prediction_fields:
- if k not in predictions:
- raise ValueError(
- 'Missing the required key `{}` in predictions!'.format(k))
-
- for k in self._required_groundtruth_fields:
- if k not in groundtruths:
- raise ValueError(
- 'Missing the required key `{}` in groundtruths!'.format(k))
-
- if self._rescale_predictions:
- for idx in range(len(groundtruths['category_mask'])):
- image_info = groundtruths['image_info'][idx]
- groundtruths_ = {
- 'category_mask':
- _crop_padding(groundtruths['category_mask'][idx], image_info),
- 'instance_mask':
- _crop_padding(groundtruths['instance_mask'][idx], image_info),
- }
- predictions_ = {
- 'category_mask':
- _crop_padding(predictions['category_mask'][idx], image_info),
- 'instance_mask':
- _crop_padding(predictions['instance_mask'][idx], image_info),
- }
- groundtruths_, predictions_ = self._convert_to_numpy(
- groundtruths_, predictions_)
-
- self._pq_metric_module.compare_and_accumulate(
- groundtruths_, predictions_)
- else:
- self._pq_metric_module.compare_and_accumulate(groundtruths, predictions)
diff --git a/official/vision/beta/evaluation/panoptic_quality_evaluator_test.py b/official/vision/beta/evaluation/panoptic_quality_evaluator_test.py
deleted file mode 100644
index e162058aed1f2daeae807b61141a835c1f62b838..0000000000000000000000000000000000000000
--- a/official/vision/beta/evaluation/panoptic_quality_evaluator_test.py
+++ /dev/null
@@ -1,96 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for panoptic_quality_evaluator."""
-
-import numpy as np
-import tensorflow as tf
-
-from official.vision.beta.evaluation import panoptic_quality_evaluator
-
-
-class PanopticQualityEvaluatorTest(tf.test.TestCase):
-
- def test_multiple_batches(self):
- category_mask = np.zeros([6, 6], np.uint16)
- groundtruth_instance_mask = np.array([
- [1, 1, 1, 1, 1, 1],
- [1, 1, 1, 1, 1, 1],
- [1, 1, 2, 2, 2, 1],
- [1, 2, 2, 2, 2, 1],
- [1, 1, 1, 1, 1, 1],
- [1, 1, 1, 1, 1, 1],
- ],
- dtype=np.uint16)
-
- good_det_instance_mask = np.array([
- [1, 1, 1, 1, 1, 1],
- [1, 1, 1, 1, 1, 1],
- [1, 2, 2, 2, 2, 1],
- [1, 2, 2, 2, 1, 1],
- [1, 1, 1, 1, 1, 1],
- [1, 1, 1, 1, 1, 1],
- ],
- dtype=np.uint16)
-
- groundtruths = {
- 'category_mask':
- tf.convert_to_tensor([category_mask]),
- 'instance_mask':
- tf.convert_to_tensor([groundtruth_instance_mask]),
- 'image_info':
- tf.convert_to_tensor([[[6, 6], [6, 6], [1.0, 1.0], [0, 0]]],
- dtype=tf.float32)
- }
- predictions = {
- 'category_mask': tf.convert_to_tensor([category_mask]),
- 'instance_mask': tf.convert_to_tensor([good_det_instance_mask])
- }
-
- pq_evaluator = panoptic_quality_evaluator.PanopticQualityEvaluator(
- num_categories=1,
- ignored_label=2,
- max_instances_per_category=16,
- offset=16,
- rescale_predictions=True)
- for _ in range(2):
- pq_evaluator.update_state(groundtruths, predictions)
-
- bad_det_instance_mask = np.array([
- [1, 1, 1, 1, 1, 1],
- [1, 1, 1, 1, 1, 1],
- [1, 1, 1, 2, 2, 1],
- [1, 1, 1, 2, 2, 1],
- [1, 1, 1, 2, 2, 1],
- [1, 1, 1, 1, 1, 1],
- ],
- dtype=np.uint16)
- predictions['instance_mask'] = tf.convert_to_tensor([bad_det_instance_mask])
- for _ in range(2):
- pq_evaluator.update_state(groundtruths, predictions)
-
- results = pq_evaluator.result()
- np.testing.assert_array_equal(results['pq_per_class'],
- [((28 / 30 + 6 / 8) + (27 / 32)) / 2 / 2])
- np.testing.assert_array_equal(results['rq_per_class'], [3 / 4])
- np.testing.assert_array_equal(results['sq_per_class'],
- [((28 / 30 + 6 / 8) + (27 / 32)) / 3])
- self.assertAlmostEqual(results['All_pq'], 0.63177083)
- self.assertAlmostEqual(results['All_rq'], 0.75)
- self.assertAlmostEqual(results['All_sq'], 0.84236111)
- self.assertEqual(results['All_num_categories'], 1)
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/evaluation/panoptic_quality_test.py b/official/vision/beta/evaluation/panoptic_quality_test.py
deleted file mode 100644
index 60cf27c223ee5e0cf2dfdb048148edf6b6061cd3..0000000000000000000000000000000000000000
--- a/official/vision/beta/evaluation/panoptic_quality_test.py
+++ /dev/null
@@ -1,305 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for Panoptic Quality metric.
-
-Note that this metric test class is branched from
-https://github.com/tensorflow/models/blob/master/research/deeplab/evaluation/panoptic_quality_test.py
-"""
-
-
-from absl.testing import absltest
-import numpy as np
-
-from official.vision.beta.evaluation import panoptic_quality
-
-
-class PanopticQualityTest(absltest.TestCase):
-
- def test_perfect_match(self):
- category_mask = np.zeros([6, 6], np.uint16)
- instance_mask = np.array([
- [1, 1, 1, 1, 1, 1],
- [1, 2, 2, 2, 2, 1],
- [1, 2, 2, 2, 2, 1],
- [1, 2, 2, 2, 2, 1],
- [1, 2, 2, 1, 1, 1],
- [1, 2, 1, 1, 1, 1],
- ],
- dtype=np.uint16)
-
- groundtruths = {
- 'category_mask': category_mask,
- 'instance_mask': instance_mask
- }
- predictions = {
- 'category_mask': category_mask,
- 'instance_mask': instance_mask
- }
- pq_metric = panoptic_quality.PanopticQuality(
- num_categories=1,
- ignored_label=2,
- max_instances_per_category=16,
- offset=16)
- pq_metric.compare_and_accumulate(groundtruths, predictions)
-
- np.testing.assert_array_equal(pq_metric.iou_per_class, [2.0])
- np.testing.assert_array_equal(pq_metric.tp_per_class, [2])
- np.testing.assert_array_equal(pq_metric.fn_per_class, [0])
- np.testing.assert_array_equal(pq_metric.fp_per_class, [0])
- results = pq_metric.result()
- np.testing.assert_array_equal(results['pq_per_class'], [1.0])
- np.testing.assert_array_equal(results['rq_per_class'], [1.0])
- np.testing.assert_array_equal(results['sq_per_class'], [1.0])
- self.assertAlmostEqual(results['All_pq'], 1.0)
- self.assertAlmostEqual(results['All_rq'], 1.0)
- self.assertAlmostEqual(results['All_sq'], 1.0)
- self.assertEqual(results['All_num_categories'], 1)
-
- def test_totally_wrong(self):
- category_mask = np.array([
- [0, 0, 0, 0, 0, 0],
- [0, 1, 0, 0, 1, 0],
- [0, 1, 1, 1, 1, 0],
- [0, 1, 1, 1, 1, 0],
- [0, 0, 0, 0, 0, 0],
- [0, 0, 0, 0, 0, 0],
- ],
- dtype=np.uint16)
- instance_mask = np.zeros([6, 6], np.uint16)
-
- groundtruths = {
- 'category_mask': category_mask,
- 'instance_mask': instance_mask
- }
- predictions = {
- 'category_mask': 1 - category_mask,
- 'instance_mask': instance_mask
- }
-
- pq_metric = panoptic_quality.PanopticQuality(
- num_categories=2,
- ignored_label=2,
- max_instances_per_category=1,
- offset=16)
- pq_metric.compare_and_accumulate(groundtruths, predictions)
- np.testing.assert_array_equal(pq_metric.iou_per_class, [0.0, 0.0])
- np.testing.assert_array_equal(pq_metric.tp_per_class, [0, 0])
- np.testing.assert_array_equal(pq_metric.fn_per_class, [1, 1])
- np.testing.assert_array_equal(pq_metric.fp_per_class, [1, 1])
- results = pq_metric.result()
- np.testing.assert_array_equal(results['pq_per_class'], [0.0, 0.0])
- np.testing.assert_array_equal(results['rq_per_class'], [0.0, 0.0])
- np.testing.assert_array_equal(results['sq_per_class'], [0.0, 0.0])
- self.assertAlmostEqual(results['All_pq'], 0.0)
- self.assertAlmostEqual(results['All_rq'], 0.0)
- self.assertAlmostEqual(results['All_sq'], 0.0)
- self.assertEqual(results['All_num_categories'], 2)
-
- def test_matches_by_iou(self):
- groundtruth_instance_mask = np.array(
- [
- [1, 1, 1, 1, 1, 1],
- [1, 1, 1, 1, 1, 1],
- [1, 1, 2, 2, 2, 1],
- [1, 2, 2, 2, 2, 1],
- [1, 1, 1, 1, 1, 1],
- [1, 1, 1, 1, 1, 1],
- ],
- dtype=np.uint16)
-
- good_det_instance_mask = np.array(
- [
- [1, 1, 1, 1, 1, 1],
- [1, 1, 1, 1, 1, 1],
- [1, 2, 2, 2, 2, 1],
- [1, 2, 2, 2, 1, 1],
- [1, 1, 1, 1, 1, 1],
- [1, 1, 1, 1, 1, 1],
- ],
- dtype=np.uint16)
-
- groundtruths = {
- 'category_mask': np.zeros_like(groundtruth_instance_mask),
- 'instance_mask': groundtruth_instance_mask
- }
- predictions = {
- 'category_mask': np.zeros_like(good_det_instance_mask),
- 'instance_mask': good_det_instance_mask
- }
- pq_metric = panoptic_quality.PanopticQuality(
- num_categories=1,
- ignored_label=2,
- max_instances_per_category=16,
- offset=16)
- pq_metric.compare_and_accumulate(groundtruths, predictions)
-
- # iou(1, 1) = 28/30
- # iou(2, 2) = 6 / 8
- np.testing.assert_array_almost_equal(pq_metric.iou_per_class,
- [28 / 30 + 6 / 8])
- np.testing.assert_array_equal(pq_metric.tp_per_class, [2])
- np.testing.assert_array_equal(pq_metric.fn_per_class, [0])
- np.testing.assert_array_equal(pq_metric.fp_per_class, [0])
- results = pq_metric.result()
- np.testing.assert_array_equal(results['pq_per_class'],
- [(28 / 30 + 6 / 8) / 2])
- np.testing.assert_array_equal(results['rq_per_class'], [1.0])
- np.testing.assert_array_equal(results['sq_per_class'],
- [(28 / 30 + 6 / 8) / 2])
- self.assertAlmostEqual(results['All_pq'], (28 / 30 + 6 / 8) / 2)
- self.assertAlmostEqual(results['All_rq'], 1.0)
- self.assertAlmostEqual(results['All_sq'], (28 / 30 + 6 / 8) / 2)
- self.assertEqual(results['All_num_categories'], 1)
-
- bad_det_instance_mask = np.array(
- [
- [1, 1, 1, 1, 1, 1],
- [1, 1, 1, 1, 1, 1],
- [1, 1, 1, 2, 2, 1],
- [1, 1, 1, 2, 2, 1],
- [1, 1, 1, 2, 2, 1],
- [1, 1, 1, 1, 1, 1],
- ],
- dtype=np.uint16)
- predictions['instance_mask'] = bad_det_instance_mask
-
- pq_metric.reset()
- pq_metric.compare_and_accumulate(groundtruths, predictions)
-
- # iou(1, 1) = 27/32
- np.testing.assert_array_almost_equal(pq_metric.iou_per_class, [27 / 32])
- np.testing.assert_array_equal(pq_metric.tp_per_class, [1])
- np.testing.assert_array_equal(pq_metric.fn_per_class, [1])
- np.testing.assert_array_equal(pq_metric.fp_per_class, [1])
- results = pq_metric.result()
- np.testing.assert_array_equal(results['pq_per_class'], [27 / 32 / 2])
- np.testing.assert_array_equal(results['rq_per_class'], [0.5])
- np.testing.assert_array_equal(results['sq_per_class'], [27 / 32])
- self.assertAlmostEqual(results['All_pq'], 27 / 32 / 2)
- self.assertAlmostEqual(results['All_rq'], 0.5)
- self.assertAlmostEqual(results['All_sq'], 27 / 32)
- self.assertEqual(results['All_num_categories'], 1)
-
- def test_wrong_instances(self):
- category_mask = np.array([
- [1, 1, 1, 1, 1, 1],
- [1, 1, 1, 1, 1, 1],
- [1, 2, 2, 1, 2, 2],
- [1, 2, 2, 1, 2, 2],
- [1, 1, 1, 1, 1, 1],
- [1, 1, 1, 1, 1, 1],
- ],
- dtype=np.uint16)
- groundtruth_instance_mask = np.zeros([6, 6], dtype=np.uint16)
- predicted_instance_mask = np.array([
- [0, 0, 0, 0, 0, 0],
- [0, 0, 0, 0, 0, 0],
- [0, 0, 0, 0, 1, 1],
- [0, 0, 0, 0, 1, 1],
- [0, 0, 0, 0, 0, 0],
- [0, 0, 0, 0, 0, 0],
- ],
- dtype=np.uint16)
-
- groundtruths = {
- 'category_mask': category_mask,
- 'instance_mask': groundtruth_instance_mask
- }
- predictions = {
- 'category_mask': category_mask,
- 'instance_mask': predicted_instance_mask
- }
-
- pq_metric = panoptic_quality.PanopticQuality(
- num_categories=3,
- ignored_label=0,
- max_instances_per_category=10,
- offset=100)
- pq_metric.compare_and_accumulate(groundtruths, predictions)
-
- np.testing.assert_array_equal(pq_metric.iou_per_class, [0.0, 1.0, 0.0])
- np.testing.assert_array_equal(pq_metric.tp_per_class, [0, 1, 0])
- np.testing.assert_array_equal(pq_metric.fn_per_class, [0, 0, 1])
- np.testing.assert_array_equal(pq_metric.fp_per_class, [0, 0, 2])
- results = pq_metric.result()
- np.testing.assert_array_equal(results['pq_per_class'], [0.0, 1.0, 0.0])
- np.testing.assert_array_equal(results['rq_per_class'], [0.0, 1.0, 0.0])
- np.testing.assert_array_equal(results['sq_per_class'], [0.0, 1.0, 0.0])
- self.assertAlmostEqual(results['All_pq'], 0.5)
- self.assertAlmostEqual(results['All_rq'], 0.5)
- self.assertAlmostEqual(results['All_sq'], 0.5)
- self.assertEqual(results['All_num_categories'], 2)
-
- def test_instance_order_is_arbitrary(self):
- category_mask = np.array([
- [1, 1, 1, 1, 1, 1],
- [1, 1, 1, 1, 1, 1],
- [1, 2, 2, 1, 2, 2],
- [1, 2, 2, 1, 2, 2],
- [1, 1, 1, 1, 1, 1],
- [1, 1, 1, 1, 1, 1],
- ],
- dtype=np.uint16)
- groundtruth_instance_mask = np.array([
- [0, 0, 0, 0, 0, 0],
- [0, 0, 0, 0, 0, 0],
- [0, 1, 1, 0, 0, 0],
- [0, 1, 1, 0, 0, 0],
- [0, 0, 0, 0, 0, 0],
- [0, 0, 0, 0, 0, 0],
- ],
- dtype=np.uint16)
- predicted_instance_mask = np.array([
- [0, 0, 0, 0, 0, 0],
- [0, 0, 0, 0, 0, 0],
- [0, 0, 0, 0, 1, 1],
- [0, 0, 0, 0, 1, 1],
- [0, 0, 0, 0, 0, 0],
- [0, 0, 0, 0, 0, 0],
- ],
- dtype=np.uint16)
-
- groundtruths = {
- 'category_mask': category_mask,
- 'instance_mask': groundtruth_instance_mask
- }
- predictions = {
- 'category_mask': category_mask,
- 'instance_mask': predicted_instance_mask
- }
-
- pq_metric = panoptic_quality.PanopticQuality(
- num_categories=3,
- ignored_label=0,
- max_instances_per_category=10,
- offset=100)
- pq_metric.compare_and_accumulate(groundtruths, predictions)
-
- np.testing.assert_array_equal(pq_metric.iou_per_class, [0.0, 1.0, 2.0])
- np.testing.assert_array_equal(pq_metric.tp_per_class, [0, 1, 2])
- np.testing.assert_array_equal(pq_metric.fn_per_class, [0, 0, 0])
- np.testing.assert_array_equal(pq_metric.fp_per_class, [0, 0, 0])
- results = pq_metric.result()
- np.testing.assert_array_equal(results['pq_per_class'], [0.0, 1.0, 1.0])
- np.testing.assert_array_equal(results['rq_per_class'], [0.0, 1.0, 1.0])
- np.testing.assert_array_equal(results['sq_per_class'], [0.0, 1.0, 1.0])
- self.assertAlmostEqual(results['All_pq'], 1.0)
- self.assertAlmostEqual(results['All_rq'], 1.0)
- self.assertAlmostEqual(results['All_sq'], 1.0)
- self.assertEqual(results['All_num_categories'], 2)
-
-
-if __name__ == '__main__':
- absltest.main()
diff --git a/official/vision/beta/evaluation/segmentation_metrics.py b/official/vision/beta/evaluation/segmentation_metrics.py
deleted file mode 100644
index 6d6bd8d64330b03610e4b9f2af8710d5696c80d2..0000000000000000000000000000000000000000
--- a/official/vision/beta/evaluation/segmentation_metrics.py
+++ /dev/null
@@ -1,227 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Metrics for segmentation."""
-import tensorflow as tf
-
-from official.vision.beta.evaluation import iou
-
-
-class MeanIoU(tf.keras.metrics.MeanIoU):
- """Mean IoU metric for semantic segmentation.
-
- This class utilizes tf.keras.metrics.MeanIoU to perform batched mean iou when
- both input images and groundtruth masks are resized to the same size
- (rescale_predictions=False). It also computes mean iou on groundtruth original
- sizes, in which case, each prediction is rescaled back to the original image
- size.
- """
-
- def __init__(
- self, num_classes, rescale_predictions=False, name=None, dtype=None):
- """Constructs Segmentation evaluator class.
-
- Args:
- num_classes: `int`, number of classes.
- rescale_predictions: `bool`, whether to scale back prediction to original
- image sizes. If True, y_true['image_info'] is used to rescale
- predictions.
- name: `str`, name of the metric instance..
- dtype: data type of the metric result.
- """
- self._rescale_predictions = rescale_predictions
- super().__init__(num_classes=num_classes, name=name, dtype=dtype)
-
- def update_state(self, y_true, y_pred):
- """Updates metric state.
-
- Args:
- y_true: `dict`, dictionary with the following name, and key values.
- - masks: [batch, width, height, 1], groundtruth masks.
- - valid_masks: [batch, width, height, 1], valid elements in the mask.
- - image_info: [batch, 4, 2], a tensor that holds information about
- original and preprocessed images. Each entry is in the format of
- [[original_height, original_width], [input_height, input_width],
- [y_scale, x_scale], [y_offset, x_offset]], where [desired_height,
- desired_width] is the actual scaled image size, and [y_scale, x_scale]
- is the scaling factor, which is the ratio of scaled dimension /
- original dimension.
- y_pred: Tensor [batch, width_p, height_p, num_classes], predicated masks.
- """
- predictions = y_pred
- masks = y_true['masks']
- valid_masks = y_true['valid_masks']
- images_info = y_true['image_info']
-
- if isinstance(predictions, tuple) or isinstance(predictions, list):
- predictions = tf.concat(predictions, axis=0)
- masks = tf.concat(masks, axis=0)
- valid_masks = tf.concat(valid_masks, axis=0)
- images_info = tf.concat(images_info, axis=0)
-
- # Ignore mask elements is set to zero for argmax op.
- masks = tf.where(valid_masks, masks, tf.zeros_like(masks))
-
- if self._rescale_predictions:
- # This part can only run on cpu/gpu due to dynamic image resizing.
- for i in range(tf.shape(predictions)[0]):
- mask = masks[i]
- valid_mask = valid_masks[i]
- predicted_mask = predictions[i]
- image_info = images_info[i]
-
- rescale_size = tf.cast(
- tf.math.ceil(image_info[1, :] / image_info[2, :]), tf.int32)
- image_shape = tf.cast(image_info[0, :], tf.int32)
- offsets = tf.cast(image_info[3, :], tf.int32)
-
- predicted_mask = tf.image.resize(
- predicted_mask,
- rescale_size,
- method=tf.image.ResizeMethod.BILINEAR)
-
- predicted_mask = tf.image.crop_to_bounding_box(predicted_mask,
- offsets[0], offsets[1],
- image_shape[0],
- image_shape[1])
- mask = tf.image.crop_to_bounding_box(mask, 0, 0, image_shape[0],
- image_shape[1])
- valid_mask = tf.image.crop_to_bounding_box(valid_mask, 0, 0,
- image_shape[0],
- image_shape[1])
-
- predicted_mask = tf.argmax(predicted_mask, axis=2)
- flatten_predictions = tf.reshape(predicted_mask, shape=[1, -1])
- flatten_masks = tf.reshape(mask, shape=[1, -1])
- flatten_valid_masks = tf.reshape(valid_mask, shape=[1, -1])
- super(MeanIoU, self).update_state(
- flatten_masks, flatten_predictions,
- tf.cast(flatten_valid_masks, tf.float32))
-
- else:
- predictions = tf.image.resize(
- predictions,
- tf.shape(masks)[1:3],
- method=tf.image.ResizeMethod.BILINEAR)
- predictions = tf.argmax(predictions, axis=3)
- flatten_predictions = tf.reshape(predictions, shape=[-1])
- flatten_masks = tf.reshape(masks, shape=[-1])
- flatten_valid_masks = tf.reshape(valid_masks, shape=[-1])
-
- super().update_state(flatten_masks, flatten_predictions,
- tf.cast(flatten_valid_masks, tf.float32))
-
-
-class PerClassIoU(iou.PerClassIoU):
- """Per Class IoU metric for semantic segmentation.
-
- This class utilizes iou.PerClassIoU to perform batched per class
- iou when both input images and groundtruth masks are resized to the same size
- (rescale_predictions=False). It also computes per class iou on groundtruth
- original sizes, in which case, each prediction is rescaled back to the
- original image size.
- """
-
- def __init__(
- self, num_classes, rescale_predictions=False, name=None, dtype=None):
- """Constructs Segmentation evaluator class.
-
- Args:
- num_classes: `int`, number of classes.
- rescale_predictions: `bool`, whether to scale back prediction to original
- image sizes. If True, y_true['image_info'] is used to rescale
- predictions.
- name: `str`, name of the metric instance..
- dtype: data type of the metric result.
- """
- self._rescale_predictions = rescale_predictions
- super().__init__(num_classes=num_classes, name=name, dtype=dtype)
-
- def update_state(self, y_true, y_pred):
- """Updates metric state.
-
- Args:
- y_true: `dict`, dictionary with the following name, and key values.
- - masks: [batch, width, height, 1], groundtruth masks.
- - valid_masks: [batch, width, height, 1], valid elements in the mask.
- - image_info: [batch, 4, 2], a tensor that holds information about
- original and preprocessed images. Each entry is in the format of
- [[original_height, original_width], [input_height, input_width],
- [y_scale, x_scale], [y_offset, x_offset]], where [desired_height,
- desired_width] is the actual scaled image size, and [y_scale, x_scale]
- is the scaling factor, which is the ratio of scaled dimension /
- original dimension.
- y_pred: Tensor [batch, width_p, height_p, num_classes], predicated masks.
- """
- predictions = y_pred
- masks = y_true['masks']
- valid_masks = y_true['valid_masks']
- images_info = y_true['image_info']
-
- if isinstance(predictions, tuple) or isinstance(predictions, list):
- predictions = tf.concat(predictions, axis=0)
- masks = tf.concat(masks, axis=0)
- valid_masks = tf.concat(valid_masks, axis=0)
- images_info = tf.concat(images_info, axis=0)
-
- # Ignore mask elements is set to zero for argmax op.
- masks = tf.where(valid_masks, masks, tf.zeros_like(masks))
-
- if self._rescale_predictions:
- # This part can only run on cpu/gpu due to dynamic image resizing.
- for i in range(tf.shape(predictions)[0]):
- mask = masks[i]
- valid_mask = valid_masks[i]
- predicted_mask = predictions[i]
- image_info = images_info[i]
-
- rescale_size = tf.cast(
- tf.math.ceil(image_info[1, :] / image_info[2, :]), tf.int32)
- image_shape = tf.cast(image_info[0, :], tf.int32)
- offsets = tf.cast(image_info[3, :], tf.int32)
-
- predicted_mask = tf.image.resize(
- predicted_mask,
- rescale_size,
- method=tf.image.ResizeMethod.BILINEAR)
-
- predicted_mask = tf.image.crop_to_bounding_box(predicted_mask,
- offsets[0], offsets[1],
- image_shape[0],
- image_shape[1])
- mask = tf.image.crop_to_bounding_box(mask, 0, 0, image_shape[0],
- image_shape[1])
- valid_mask = tf.image.crop_to_bounding_box(valid_mask, 0, 0,
- image_shape[0],
- image_shape[1])
-
- predicted_mask = tf.argmax(predicted_mask, axis=2)
- flatten_predictions = tf.reshape(predicted_mask, shape=[1, -1])
- flatten_masks = tf.reshape(mask, shape=[1, -1])
- flatten_valid_masks = tf.reshape(valid_mask, shape=[1, -1])
- super().update_state(flatten_masks, flatten_predictions,
- tf.cast(flatten_valid_masks, tf.float32))
-
- else:
- predictions = tf.image.resize(
- predictions,
- tf.shape(masks)[1:3],
- method=tf.image.ResizeMethod.BILINEAR)
- predictions = tf.argmax(predictions, axis=3)
- flatten_predictions = tf.reshape(predictions, shape=[-1])
- flatten_masks = tf.reshape(masks, shape=[-1])
- flatten_valid_masks = tf.reshape(valid_masks, shape=[-1])
-
- super().update_state(flatten_masks, flatten_predictions,
- tf.cast(flatten_valid_masks, tf.float32))
diff --git a/official/vision/beta/evaluation/segmentation_metrics_test.py b/official/vision/beta/evaluation/segmentation_metrics_test.py
deleted file mode 100644
index 27b0c3b8e07438d6a510a9929dd5d6ecdcaa09b5..0000000000000000000000000000000000000000
--- a/official/vision/beta/evaluation/segmentation_metrics_test.py
+++ /dev/null
@@ -1,77 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for segmentation_metrics."""
-
-from absl.testing import parameterized
-import numpy as np
-import tensorflow as tf
-
-from official.vision.beta.evaluation import segmentation_metrics
-
-
-class SegmentationMetricsTest(parameterized.TestCase, tf.test.TestCase):
-
- def _create_test_data(self):
- y_pred_cls0 = np.expand_dims(
- np.array([[1, 1, 0], [1, 1, 0], [0, 0, 0]], dtype=np.uint16),
- axis=(0, -1))
- y_pred_cls1 = np.expand_dims(
- np.array([[0, 0, 0], [0, 0, 1], [0, 0, 1]], dtype=np.uint16),
- axis=(0, -1))
- y_pred = np.concatenate((y_pred_cls0, y_pred_cls1), axis=-1)
-
- y_true = {
- 'masks':
- np.expand_dims(
- np.array([[0, 0, 0, 0, 0, 0], [0, 0, 0, 0, 0, 0],
- [0, 0, 0, 0, 0, 0], [0, 0, 0, 1, 1, 1],
- [0, 0, 0, 1, 1, 1], [0, 0, 0, 1, 1, 1]],
- dtype=np.uint16),
- axis=(0, -1)),
- 'valid_masks':
- np.ones([1, 6, 6, 1], dtype=np.uint16),
- 'image_info':
- np.array([[[6, 6], [3, 3], [0.5, 0.5], [0, 0]]], dtype=np.float32)
- }
- return y_pred, y_true
-
- @parameterized.parameters(True, False)
- def test_mean_iou_metric(self, rescale_predictions):
- tf.config.experimental_run_functions_eagerly(True)
- mean_iou_metric = segmentation_metrics.MeanIoU(
- num_classes=2, rescale_predictions=rescale_predictions)
- y_pred, y_true = self._create_test_data()
- # Disable autograph for correct coverage statistics.
- update_fn = tf.autograph.experimental.do_not_convert(
- mean_iou_metric.update_state)
- update_fn(y_true=y_true, y_pred=y_pred)
- miou = mean_iou_metric.result()
- self.assertAlmostEqual(miou.numpy(), 0.762, places=3)
-
- @parameterized.parameters(True, False)
- def test_per_class_mean_iou_metric(self, rescale_predictions):
- per_class_iou_metric = segmentation_metrics.PerClassIoU(
- num_classes=2, rescale_predictions=rescale_predictions)
- y_pred, y_true = self._create_test_data()
- # Disable autograph for correct coverage statistics.
- update_fn = tf.autograph.experimental.do_not_convert(
- per_class_iou_metric.update_state)
- update_fn(y_true=y_true, y_pred=y_pred)
- per_class_miou = per_class_iou_metric.result()
- self.assertAllClose(per_class_miou.numpy(), [0.857, 0.667], atol=1e-3)
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/evaluation/wod_detection_evaluator.py b/official/vision/beta/evaluation/wod_detection_evaluator.py
deleted file mode 100644
index d33aa52caeb1896542da3fbfd0dc7b6b35bebdad..0000000000000000000000000000000000000000
--- a/official/vision/beta/evaluation/wod_detection_evaluator.py
+++ /dev/null
@@ -1,161 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""2D detection evaluator for the Waymo Open Dataset."""
-import pprint
-from absl import logging
-
-import tensorflow as tf
-from official.vision.beta.ops import box_ops
-from waymo_open_dataset import label_pb2
-from waymo_open_dataset.metrics.python import wod_detection_evaluator
-from waymo_open_dataset.protos import breakdown_pb2
-from waymo_open_dataset.protos import metrics_pb2
-
-
-def get_2d_detection_default_config():
- """Returns the config proto for WOD 2D detection Evaluation."""
- config = metrics_pb2.Config()
-
- config.breakdown_generator_ids.append(breakdown_pb2.Breakdown.OBJECT_TYPE)
- difficulty = config.difficulties.add()
- difficulty.levels.append(label_pb2.Label.LEVEL_1)
- difficulty.levels.append(label_pb2.Label.LEVEL_2)
- config.breakdown_generator_ids.append(breakdown_pb2.Breakdown.ALL_BUT_SIGN)
- difficulty = config.difficulties.add()
- difficulty.levels.append(label_pb2.Label.LEVEL_1)
- difficulty.levels.append(label_pb2.Label.LEVEL_2)
- config.matcher_type = metrics_pb2.MatcherProto.TYPE_HUNGARIAN
- config.iou_thresholds.append(0.0)
- config.iou_thresholds.append(0.7)
- config.iou_thresholds.append(0.5)
- config.iou_thresholds.append(0.5)
- config.iou_thresholds.append(0.5)
- config.box_type = label_pb2.Label.Box.TYPE_2D
-
- for i in range(100):
- config.score_cutoffs.append(i * 0.01)
- config.score_cutoffs.append(1.0)
-
- return config
-
-
-class WOD2dDetectionEvaluator(wod_detection_evaluator.WODDetectionEvaluator):
- """WOD 2D detection evaluation metric class."""
-
- def __init__(self, config=None):
- if config is None:
- config = get_2d_detection_default_config()
- super().__init__(config=config)
-
- def _remove_padding(self, tensor_dict, num_valid):
- """Remove the paddings of the prediction/groundtruth data."""
- result_tensor_dict = {}
- gather_indices = tf.range(num_valid)
- for k, v in tensor_dict.items():
- if 'frame_id' in k:
- result_tensor_dict[k] = tf.tile([v], [num_valid])
- else:
- result_tensor_dict[k] = tf.gather(v, gather_indices)
- return result_tensor_dict
-
- def update_state(self, groundtruths, predictions):
- """Update the metrics state with prediction and groundtruth data.
-
- Args:
- groundtruths: a dictionary of Tensors including the fields below.
- Required fields:
- - source_id: a numpy array of int or string of shape [batch_size].
- - num_detections: a numpy array of int of shape [batch_size].
- - boxes: a numpy array of float of shape [batch_size, K, 4].
- - classes: a numpy array of int of shape [batch_size, K].
- - difficulties: a numpy array of int of shape [batch_size, K].
-
- predictions: a dictionary of tensors including the fields below.
- Required fields:
- - source_id: a numpy array of int or string of shape [batch_size].
- - image_info: a numpy array of float of shape [batch_size, 4, 2].
- - num_detections: a numpy array of int of shape [batch_size].
- - detection_boxes: a numpy array of float of shape [batch_size, K, 4].
- - detection_classes: a numpy array of int of shape [batch_size, K].
- - detection_scores: a numpy array of float of shape [batch_size, K].
- """
- # Preprocess potentially aggregated tensors.
- for k, v in groundtruths.items():
- if isinstance(v, tuple):
- groundtruths[k] = tf.concat(v, axis=0)
- for k, v in predictions.items():
- if isinstance(v, tuple):
- predictions[k] = tf.concat(v, axis=0)
-
- # Change cyclists' type id from 3 to 4, where 3 is reserved for sign.
- groundtruth_type = tf.cast(groundtruths['classes'], tf.uint8)
- groundtruth_type = tf.where(
- tf.equal(groundtruth_type, 3),
- tf.ones_like(groundtruth_type) * 4, groundtruth_type)
- prediction_type = tf.cast(predictions['detection_classes'], tf.uint8)
- prediction_type = tf.where(
- tf.equal(prediction_type, 3),
- tf.ones_like(prediction_type) * 4, prediction_type)
-
- # Rescale the detection boxes back to original scale.
- image_scale = tf.tile(predictions['image_info'][:, 2:3, :], (1, 1, 2))
- prediction_bbox = predictions['detection_boxes'] / image_scale
-
- batch_size = tf.shape(groundtruths['source_id'])[0]
-
- for i in tf.range(batch_size):
- frame_groundtruths = {
- 'ground_truth_frame_id':
- groundtruths['source_id'][i],
- 'ground_truth_bbox':
- box_ops.yxyx_to_cycxhw(
- tf.cast(groundtruths['boxes'][i], tf.float32)),
- 'ground_truth_type':
- groundtruth_type[i],
- 'ground_truth_difficulty':
- tf.cast(groundtruths['difficulties'][i], tf.uint8),
- }
- frame_groundtruths = self._remove_padding(
- frame_groundtruths, groundtruths['num_detections'][i])
- frame_predictions = {
- 'prediction_frame_id':
- groundtruths['source_id'][i],
- 'prediction_bbox':
- box_ops.yxyx_to_cycxhw(
- tf.cast(prediction_bbox[i], tf.float32)),
- 'prediction_type':
- prediction_type[i],
- 'prediction_score':
- tf.cast(predictions['detection_scores'][i], tf.float32),
- 'prediction_overlap_nlz':
- tf.zeros_like(predictions['detection_scores'][i], dtype=tf.bool)
- }
- frame_predictions = self._remove_padding(frame_predictions,
- predictions['num_detections'][i])
- super().update_state(frame_groundtruths, frame_predictions)
-
- def evaluate(self):
- """Compute the final metrics."""
- ap, _, _, _, _ = super().evaluate()
- metric_dict = {}
- for i, name in enumerate(self._breakdown_names):
- # Skip sign metrics in 2d detection task.
- if 'SIGN' in name:
- continue
- metric_dict['WOD metrics/{}/AP'.format(name)] = ap[i]
- pp = pprint.PrettyPrinter()
- logging.info('WOD Detection Metrics: \n %s', pp.pformat(metric_dict))
-
- return metric_dict
diff --git a/official/vision/beta/losses/__init__.py b/official/vision/beta/losses/__init__.py
deleted file mode 100644
index 310bfb28f0c252bc4a4485325059bff28c5250c2..0000000000000000000000000000000000000000
--- a/official/vision/beta/losses/__init__.py
+++ /dev/null
@@ -1,14 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
diff --git a/official/vision/beta/losses/focal_loss.py b/official/vision/beta/losses/focal_loss.py
deleted file mode 100644
index 4a4ce70b35829d8c1d93e6cabefe3072d21f3ab3..0000000000000000000000000000000000000000
--- a/official/vision/beta/losses/focal_loss.py
+++ /dev/null
@@ -1,84 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Losses used for detection models."""
-
-import tensorflow as tf
-
-
-class FocalLoss(tf.keras.losses.Loss):
- """Implements a Focal loss for classification problems.
-
- Reference:
- [Focal Loss for Dense Object Detection](https://arxiv.org/abs/1708.02002).
- """
-
- def __init__(self,
- alpha,
- gamma,
- reduction=tf.keras.losses.Reduction.AUTO,
- name=None):
- """Initializes `FocalLoss`.
-
- Args:
- alpha: The `alpha` weight factor for binary class imbalance.
- gamma: The `gamma` focusing parameter to re-weight loss.
- reduction: (Optional) Type of `tf.keras.losses.Reduction` to apply to
- loss. Default value is `AUTO`. `AUTO` indicates that the reduction
- option will be determined by the usage context. For almost all cases
- this defaults to `SUM_OVER_BATCH_SIZE`. When used with
- `tf.distribute.Strategy`, outside of built-in training loops such as
- `tf.keras` `compile` and `fit`, using `AUTO` or `SUM_OVER_BATCH_SIZE`
- will raise an error. Please see this custom training [tutorial](
- https://www.tensorflow.org/tutorials/distribute/custom_training) for
- more details.
- name: Optional name for the op. Defaults to 'retinanet_class_loss'.
- """
- self._alpha = alpha
- self._gamma = gamma
- super(FocalLoss, self).__init__(reduction=reduction, name=name)
-
- def call(self, y_true, y_pred):
- """Invokes the `FocalLoss`.
-
- Args:
- y_true: A tensor of size [batch, num_anchors, num_classes]
- y_pred: A tensor of size [batch, num_anchors, num_classes]
-
- Returns:
- Summed loss float `Tensor`.
- """
- with tf.name_scope('focal_loss'):
- y_true = tf.cast(y_true, dtype=tf.float32)
- y_pred = tf.cast(y_pred, dtype=tf.float32)
- positive_label_mask = tf.equal(y_true, 1.0)
- cross_entropy = (
- tf.nn.sigmoid_cross_entropy_with_logits(labels=y_true, logits=y_pred))
- probs = tf.sigmoid(y_pred)
- probs_gt = tf.where(positive_label_mask, probs, 1.0 - probs)
- # With small gamma, the implementation could produce NaN during back prop.
- modulator = tf.pow(1.0 - probs_gt, self._gamma)
- loss = modulator * cross_entropy
- weighted_loss = tf.where(positive_label_mask, self._alpha * loss,
- (1.0 - self._alpha) * loss)
-
- return weighted_loss
-
- def get_config(self):
- config = {
- 'alpha': self._alpha,
- 'gamma': self._gamma,
- }
- base_config = super(FocalLoss, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
diff --git a/official/vision/beta/losses/loss_utils.py b/official/vision/beta/losses/loss_utils.py
deleted file mode 100644
index 1c59d0c89d5a105afe054abe64a87aa44f7e5c47..0000000000000000000000000000000000000000
--- a/official/vision/beta/losses/loss_utils.py
+++ /dev/null
@@ -1,42 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Losses utilities for detection models."""
-
-import tensorflow as tf
-
-
-def multi_level_flatten(multi_level_inputs, last_dim=None):
- """Flattens a multi-level input.
-
- Args:
- multi_level_inputs: Ordered Dict with level to [batch, d1, ..., dm].
- last_dim: Whether the output should be [batch_size, None], or [batch_size,
- None, last_dim]. Defaults to `None`.
-
- Returns:
- Concatenated output [batch_size, None], or [batch_size, None, dm]
- """
- flattened_inputs = []
- batch_size = None
- for level in multi_level_inputs.keys():
- single_input = multi_level_inputs[level]
- if batch_size is None:
- batch_size = single_input.shape[0] or tf.shape(single_input)[0]
- if last_dim is not None:
- flattened_input = tf.reshape(single_input, [batch_size, -1, last_dim])
- else:
- flattened_input = tf.reshape(single_input, [batch_size, -1])
- flattened_inputs.append(flattened_input)
- return tf.concat(flattened_inputs, axis=1)
diff --git a/official/vision/beta/losses/maskrcnn_losses.py b/official/vision/beta/losses/maskrcnn_losses.py
deleted file mode 100644
index 99e0ac95bc25140ccce471f01660eb427d5c2e5a..0000000000000000000000000000000000000000
--- a/official/vision/beta/losses/maskrcnn_losses.py
+++ /dev/null
@@ -1,312 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Losses for maskrcn model."""
-
-# Import libraries
-import tensorflow as tf
-
-
-class RpnScoreLoss(object):
- """Region Proposal Network score loss function."""
-
- def __init__(self, rpn_batch_size_per_im):
- self._rpn_batch_size_per_im = rpn_batch_size_per_im
- self._binary_crossentropy = tf.keras.losses.BinaryCrossentropy(
- reduction=tf.keras.losses.Reduction.SUM, from_logits=True)
-
- def __call__(self, score_outputs, labels):
- """Computes total RPN detection loss.
-
- Computes total RPN detection loss including box and score from all levels.
-
- Args:
- score_outputs: an OrderDict with keys representing levels and values
- representing scores in [batch_size, height, width, num_anchors].
- labels: the dictionary that returned from dataloader that includes
- groundturth targets.
-
- Returns:
- rpn_score_loss: a scalar tensor representing total score loss.
- """
- with tf.name_scope('rpn_loss'):
- levels = sorted(score_outputs.keys())
-
- score_losses = []
- for level in levels:
- score_losses.append(
- self._rpn_score_loss(
- score_outputs[level],
- labels[level],
- normalizer=tf.cast(
- tf.shape(score_outputs[level])[0] *
- self._rpn_batch_size_per_im,
- dtype=tf.float32)))
-
- # Sums per level losses to total loss.
- return tf.math.add_n(score_losses)
-
- def _rpn_score_loss(self, score_outputs, score_targets, normalizer=1.0):
- """Computes score loss."""
- # score_targets has three values:
- # (1) score_targets[i]=1, the anchor is a positive sample.
- # (2) score_targets[i]=0, negative.
- # (3) score_targets[i]=-1, the anchor is don't care (ignore).
- with tf.name_scope('rpn_score_loss'):
- mask = tf.math.logical_or(tf.math.equal(score_targets, 1),
- tf.math.equal(score_targets, 0))
-
- score_targets = tf.math.maximum(score_targets,
- tf.zeros_like(score_targets))
-
- score_targets = tf.expand_dims(score_targets, axis=-1)
- score_outputs = tf.expand_dims(score_outputs, axis=-1)
- score_loss = self._binary_crossentropy(
- score_targets, score_outputs, sample_weight=mask)
-
- score_loss /= normalizer
- return score_loss
-
-
-class RpnBoxLoss(object):
- """Region Proposal Network box regression loss function."""
-
- def __init__(self, huber_loss_delta: float):
- # The delta is typically around the mean value of regression target.
- # for instances, the regression targets of 512x512 input with 6 anchors on
- # P2-P6 pyramid is about [0.1, 0.1, 0.2, 0.2].
- self._huber_loss = tf.keras.losses.Huber(
- delta=huber_loss_delta, reduction=tf.keras.losses.Reduction.SUM)
-
- def __call__(self, box_outputs, labels):
- """Computes total RPN detection loss.
-
- Computes total RPN detection loss including box and score from all levels.
-
- Args:
- box_outputs: an OrderDict with keys representing levels and values
- representing box regression targets in
- [batch_size, height, width, num_anchors * 4].
- labels: the dictionary that returned from dataloader that includes
- groundturth targets.
-
- Returns:
- rpn_box_loss: a scalar tensor representing total box regression loss.
- """
- with tf.name_scope('rpn_loss'):
- levels = sorted(box_outputs.keys())
-
- box_losses = []
- for level in levels:
- box_losses.append(self._rpn_box_loss(box_outputs[level], labels[level]))
-
- # Sum per level losses to total loss.
- return tf.add_n(box_losses)
-
- def _rpn_box_loss(self, box_outputs, box_targets, normalizer=1.0):
- """Computes box regression loss."""
- with tf.name_scope('rpn_box_loss'):
- mask = tf.cast(tf.not_equal(box_targets, 0.0), dtype=tf.float32)
- box_targets = tf.expand_dims(box_targets, axis=-1)
- box_outputs = tf.expand_dims(box_outputs, axis=-1)
- box_loss = self._huber_loss(box_targets, box_outputs, sample_weight=mask)
- # The loss is normalized by the sum of non-zero weights and additional
- # normalizer provided by the function caller. Using + 0.01 here to avoid
- # division by zero.
- box_loss /= normalizer * (tf.reduce_sum(mask) + 0.01)
- return box_loss
-
-
-class FastrcnnClassLoss(object):
- """Fast R-CNN classification loss function."""
-
- def __init__(self):
- self._categorical_crossentropy = tf.keras.losses.CategoricalCrossentropy(
- reduction=tf.keras.losses.Reduction.SUM, from_logits=True)
-
- def __call__(self, class_outputs, class_targets):
- """Computes the class loss (Fast-RCNN branch) of Mask-RCNN.
-
- This function implements the classification loss of the Fast-RCNN.
-
- The classification loss is softmax on all RoIs.
- Reference: https://github.com/facebookresearch/Detectron/blob/master/detectron/modeling/fast_rcnn_heads.py # pylint: disable=line-too-long
-
- Args:
- class_outputs: a float tensor representing the class prediction for each box
- with a shape of [batch_size, num_boxes, num_classes].
- class_targets: a float tensor representing the class label for each box
- with a shape of [batch_size, num_boxes].
-
- Returns:
- a scalar tensor representing total class loss.
- """
- with tf.name_scope('fast_rcnn_loss'):
- batch_size, num_boxes, num_classes = class_outputs.get_shape().as_list()
- class_targets = tf.cast(class_targets, dtype=tf.int32)
- class_targets_one_hot = tf.one_hot(class_targets, num_classes)
- return self._fast_rcnn_class_loss(class_outputs, class_targets_one_hot,
- normalizer=batch_size * num_boxes)
-
- def _fast_rcnn_class_loss(self, class_outputs, class_targets_one_hot,
- normalizer=1.0):
- """Computes classification loss."""
- with tf.name_scope('fast_rcnn_class_loss'):
- class_loss = self._categorical_crossentropy(class_targets_one_hot,
- class_outputs)
-
- class_loss /= normalizer
- return class_loss
-
-
-class FastrcnnBoxLoss(object):
- """Fast R-CNN box regression loss function."""
-
- def __init__(self,
- huber_loss_delta: float,
- class_agnostic_bbox_pred: bool = False):
- """Initiate Faster RCNN box loss.
-
- Args:
- huber_loss_delta: the delta is typically around the mean value of
- regression target. for instances, the regression targets of 512x512
- input with 6 anchors on P2-P6 pyramid is about [0.1, 0.1, 0.2, 0.2].
- class_agnostic_bbox_pred: if True, class agnostic bounding box prediction
- is performed.
- """
- self._huber_loss = tf.keras.losses.Huber(
- delta=huber_loss_delta, reduction=tf.keras.losses.Reduction.SUM)
- self._class_agnostic_bbox_pred = class_agnostic_bbox_pred
-
- def __call__(self, box_outputs, class_targets, box_targets):
- """Computes the box loss (Fast-RCNN branch) of Mask-RCNN.
-
- This function implements the box regression loss of the Fast-RCNN. As the
- `box_outputs` produces `num_classes` boxes for each RoI, the reference model
- expands `box_targets` to match the shape of `box_outputs` and selects only
- the target that the RoI has a maximum overlap. (Reference: https://github.com/facebookresearch/Detectron/blob/master/detectron/roi_data/fast_rcnn.py) # pylint: disable=line-too-long
- Instead, this function selects the `box_outputs` by the `class_targets` so
- that it doesn't expand `box_targets`.
-
- The box loss is smooth L1-loss on only positive samples of RoIs.
- Reference: https://github.com/facebookresearch/Detectron/blob/master/detectron/modeling/fast_rcnn_heads.py # pylint: disable=line-too-long
-
- Args:
- box_outputs: a float tensor representing the box prediction for each box
- with a shape of [batch_size, num_boxes, num_classes * 4].
- class_targets: a float tensor representing the class label for each box
- with a shape of [batch_size, num_boxes].
- box_targets: a float tensor representing the box label for each box
- with a shape of [batch_size, num_boxes, 4].
-
- Returns:
- box_loss: a scalar tensor representing total box regression loss.
- """
- with tf.name_scope('fast_rcnn_loss'):
- class_targets = tf.cast(class_targets, dtype=tf.int32)
- if not self._class_agnostic_bbox_pred:
- box_outputs = self._assign_class_targets(box_outputs, class_targets)
-
- return self._fast_rcnn_box_loss(box_outputs, box_targets, class_targets)
-
- def _assign_class_targets(self, box_outputs, class_targets):
- """Selects the box from `box_outputs` based on `class_targets`, with which the box has the maximum overlap."""
- (batch_size, num_rois,
- num_class_specific_boxes) = box_outputs.get_shape().as_list()
- num_classes = num_class_specific_boxes // 4
- box_outputs = tf.reshape(box_outputs,
- [batch_size, num_rois, num_classes, 4])
-
- box_indices = tf.reshape(
- class_targets + tf.tile(
- tf.expand_dims(tf.range(batch_size) * num_rois * num_classes, 1),
- [1, num_rois]) + tf.tile(
- tf.expand_dims(tf.range(num_rois) * num_classes, 0),
- [batch_size, 1]), [-1])
-
- box_outputs = tf.matmul(
- tf.one_hot(
- box_indices,
- batch_size * num_rois * num_classes,
- dtype=box_outputs.dtype), tf.reshape(box_outputs, [-1, 4]))
- box_outputs = tf.reshape(box_outputs, [batch_size, -1, 4])
-
- return box_outputs
-
- def _fast_rcnn_box_loss(self, box_outputs, box_targets, class_targets,
- normalizer=1.0):
- """Computes box regression loss."""
- with tf.name_scope('fast_rcnn_box_loss'):
- mask = tf.tile(tf.expand_dims(tf.greater(class_targets, 0), axis=2),
- [1, 1, 4])
- mask = tf.cast(mask, dtype=tf.float32)
- box_targets = tf.expand_dims(box_targets, axis=-1)
- box_outputs = tf.expand_dims(box_outputs, axis=-1)
- box_loss = self._huber_loss(box_targets, box_outputs, sample_weight=mask)
- # The loss is normalized by the number of ones in mask,
- # additianal normalizer provided by the user and using 0.01 here to avoid
- # division by 0.
- box_loss /= normalizer * (tf.reduce_sum(mask) + 0.01)
- return box_loss
-
-
-class MaskrcnnLoss(object):
- """Mask R-CNN instance segmentation mask loss function."""
-
- def __init__(self):
- self._binary_crossentropy = tf.keras.losses.BinaryCrossentropy(
- reduction=tf.keras.losses.Reduction.SUM, from_logits=True)
-
- def __call__(self, mask_outputs, mask_targets, select_class_targets):
- """Computes the mask loss of Mask-RCNN.
-
- This function implements the mask loss of Mask-RCNN. As the `mask_outputs`
- produces `num_classes` masks for each RoI, the reference model expands
- `mask_targets` to match the shape of `mask_outputs` and selects only the
- target that the RoI has a maximum overlap. (Reference: https://github.com/facebookresearch/Detectron/blob/master/detectron/roi_data/mask_rcnn.py) # pylint: disable=line-too-long
- Instead, this implementation selects the `mask_outputs` by the `class_targets`
- so that it doesn't expand `mask_targets`. Note that the selection logic is
- done in the post-processing of mask_rcnn_fn in mask_rcnn_architecture.py.
-
- Args:
- mask_outputs: a float tensor representing the prediction for each mask,
- with a shape of
- [batch_size, num_masks, mask_height, mask_width].
- mask_targets: a float tensor representing the binary mask of ground truth
- labels for each mask with a shape of
- [batch_size, num_masks, mask_height, mask_width].
- select_class_targets: a tensor with a shape of [batch_size, num_masks],
- representing the foreground mask targets.
-
- Returns:
- mask_loss: a float tensor representing total mask loss.
- """
- with tf.name_scope('mask_rcnn_loss'):
- (batch_size, num_masks, mask_height,
- mask_width) = mask_outputs.get_shape().as_list()
-
- weights = tf.tile(
- tf.reshape(tf.greater(select_class_targets, 0),
- [batch_size, num_masks, 1, 1]),
- [1, 1, mask_height, mask_width])
- weights = tf.cast(weights, dtype=tf.float32)
-
- mask_targets = tf.expand_dims(mask_targets, axis=-1)
- mask_outputs = tf.expand_dims(mask_outputs, axis=-1)
- mask_loss = self._binary_crossentropy(mask_targets, mask_outputs,
- sample_weight=weights)
-
- # The loss is normalized by the number of 1's in weights and
- # + 0.01 is used to avoid division by zero.
- return mask_loss / (tf.reduce_sum(weights) + 0.01)
diff --git a/official/vision/beta/losses/retinanet_losses.py b/official/vision/beta/losses/retinanet_losses.py
deleted file mode 100644
index 91aaecf082d4d5d390a2445c5e3290767401c578..0000000000000000000000000000000000000000
--- a/official/vision/beta/losses/retinanet_losses.py
+++ /dev/null
@@ -1,206 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Losses used for detection models."""
-
-# Import libraries
-import tensorflow as tf
-
-
-def focal_loss(logits, targets, alpha, gamma):
- """Compute the focal loss between `logits` and the golden `target` values.
-
- Focal loss = -(1-pt)^gamma * log(pt)
- where pt is the probability of being classified to the true class.
-
- Args:
- logits: A float32 tensor of size
- [batch, d_1, ..., d_k, n_classes].
- targets: A float32 tensor of size
- [batch, d_1, ..., d_k, n_classes].
- alpha: A float32 scalar multiplying alpha to the loss from positive examples
- and (1-alpha) to the loss from negative examples.
- gamma: A float32 scalar modulating loss from hard and easy examples.
-
- Returns:
- loss: A float32 Tensor of size
- [batch, d_1, ..., d_k, n_classes] representing
- normalized loss on the prediction map.
- """
- with tf.name_scope('focal_loss'):
- positive_label_mask = tf.equal(targets, 1.0)
- cross_entropy = (
- tf.nn.sigmoid_cross_entropy_with_logits(labels=targets, logits=logits))
- probs = tf.sigmoid(logits)
- probs_gt = tf.where(positive_label_mask, probs, 1.0 - probs)
- # With small gamma, the implementation could produce NaN during back prop.
- modulator = tf.pow(1.0 - probs_gt, gamma)
- loss = modulator * cross_entropy
- weighted_loss = tf.where(positive_label_mask, alpha * loss,
- (1.0 - alpha) * loss)
-
- return weighted_loss
-
-
-class FocalLoss(tf.keras.losses.Loss):
- """Implements a Focal loss for classification problems.
-
- Reference:
- [Focal Loss for Dense Object Detection](https://arxiv.org/abs/1708.02002).
- """
-
- def __init__(self,
- alpha,
- gamma,
- num_classes,
- reduction=tf.keras.losses.Reduction.AUTO,
- name=None):
- """Initializes `FocalLoss`.
-
- Args:
- alpha: The `alpha` weight factor for binary class imbalance.
- gamma: The `gamma` focusing parameter to re-weight loss.
- num_classes: Number of foreground classes.
- reduction: (Optional) Type of `tf.keras.losses.Reduction` to apply to
- loss. Default value is `AUTO`. `AUTO` indicates that the reduction
- option will be determined by the usage context. For almost all cases
- this defaults to `SUM_OVER_BATCH_SIZE`. When used with
- `tf.distribute.Strategy`, outside of built-in training loops such as
- `tf.keras` `compile` and `fit`, using `AUTO` or `SUM_OVER_BATCH_SIZE`
- will raise an error. Please see this custom training [tutorial](
- https://www.tensorflow.org/tutorials/distribute/custom_training) for
- more details.
- name: Optional name for the op. Defaults to 'retinanet_class_loss'.
- """
- self._num_classes = num_classes
- self._alpha = alpha
- self._gamma = gamma
- super(FocalLoss, self).__init__(reduction=reduction, name=name)
-
- def call(self, y_true, y_pred):
- """Invokes the `FocalLoss`.
-
- Args:
- y_true: Ordered Dict with level to [batch, height, width, num_anchors].
- for example,
- {3: tf.Tensor(shape=[32, 512, 512, 9], dtype=tf.float32),
- 4: tf.Tensor([shape=32, 256, 256, 9, dtype=tf.float32])}
- y_pred: Ordered Dict with level to [batch, height, width, num_anchors *
- num_classes]. for example,
- {3: tf.Tensor(shape=[32, 512, 512, 9], dtype=tf.int64),
- 4: tf.Tensor(shape=[32, 256, 256, 9 * 21], dtype=tf.int64)}
-
- Returns:
- Summed loss float `Tensor`.
- """
- flattened_cls_outputs = []
- flattened_labels = []
- batch_size = None
- for level in y_pred.keys():
- cls_output = y_pred[level]
- label = y_true[level]
- if batch_size is None:
- batch_size = cls_output.shape[0] or tf.shape(cls_output)[0]
- flattened_cls_outputs.append(
- tf.reshape(cls_output, [batch_size, -1, self._num_classes]))
- flattened_labels.append(tf.reshape(label, [batch_size, -1]))
- cls_outputs = tf.concat(flattened_cls_outputs, axis=1)
- labels = tf.concat(flattened_labels, axis=1)
-
- cls_targets_one_hot = tf.one_hot(labels, self._num_classes)
- return focal_loss(
- tf.cast(cls_outputs, dtype=tf.float32),
- tf.cast(cls_targets_one_hot, dtype=tf.float32), self._alpha,
- self._gamma)
-
- def get_config(self):
- config = {
- 'alpha': self._alpha,
- 'gamma': self._gamma,
- 'num_classes': self._num_classes,
- }
- base_config = super(FocalLoss, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
-
-class RetinanetBoxLoss(tf.keras.losses.Loss):
- """RetinaNet box Huber loss."""
-
- def __init__(self,
- delta,
- reduction=tf.keras.losses.Reduction.AUTO,
- name=None):
- """Initializes `RetinanetBoxLoss`.
-
- Args:
- delta: A float, the point where the Huber loss function changes from a
- quadratic to linear.
- reduction: (Optional) Type of `tf.keras.losses.Reduction` to apply to
- loss. Default value is `AUTO`. `AUTO` indicates that the reduction
- option will be determined by the usage context. For almost all cases
- this defaults to `SUM_OVER_BATCH_SIZE`. When used with
- `tf.distribute.Strategy`, outside of built-in training loops such as
- `tf.keras` `compile` and `fit`, using `AUTO` or `SUM_OVER_BATCH_SIZE`
- will raise an error. Please see this custom training [tutorial](
- https://www.tensorflow.org/tutorials/distribute/custom_training) for
- more details.
- name: Optional name for the op. Defaults to 'retinanet_class_loss'.
- """
- self._huber_loss = tf.keras.losses.Huber(
- delta=delta, reduction=tf.keras.losses.Reduction.NONE)
- self._delta = delta
- super(RetinanetBoxLoss, self).__init__(reduction=reduction, name=name)
-
- def call(self, y_true, y_pred):
- """Computes box detection loss.
-
- Computes total detection loss including box and class loss from all levels.
-
- Args:
- y_true: Ordered Dict with level to [batch, height, width,
- num_anchors * 4] for example,
- {3: tf.Tensor(shape=[32, 512, 512, 9 * 4], dtype=tf.float32),
- 4: tf.Tensor([shape=32, 256, 256, 9 * 4, dtype=tf.float32])}
- y_pred: Ordered Dict with level to [batch, height, width,
- num_anchors * 4]. for example,
- {3: tf.Tensor(shape=[32, 512, 512, 9 * 4], dtype=tf.int64),
- 4: tf.Tensor(shape=[32, 256, 256, 9 * 4], dtype=tf.int64)}
-
- Returns:
- an integer tensor representing total box regression loss.
- """
- # Sums all positives in a batch for normalization and avoids zero
- # num_positives_sum, which would lead to inf loss during training
-
- flattened_box_outputs = []
- flattened_labels = []
- batch_size = None
- for level in y_pred.keys():
- box_output = y_pred[level]
- label = y_true[level]
- if batch_size is None:
- batch_size = box_output.shape[0] or tf.shape(box_output)[0]
- flattened_box_outputs.append(tf.reshape(box_output, [batch_size, -1, 4]))
- flattened_labels.append(tf.reshape(label, [batch_size, -1, 4]))
- box_outputs = tf.concat(flattened_box_outputs, axis=1)
- labels = tf.concat(flattened_labels, axis=1)
- loss = self._huber_loss(labels, box_outputs)
- return loss
-
- def get_config(self):
- config = {
- 'delta': self._delta,
- }
- base_config = super(RetinanetBoxLoss, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
diff --git a/official/vision/beta/losses/segmentation_losses.py b/official/vision/beta/losses/segmentation_losses.py
deleted file mode 100644
index e336cbb272db78b6a3626fca0551c449db00bb2b..0000000000000000000000000000000000000000
--- a/official/vision/beta/losses/segmentation_losses.py
+++ /dev/null
@@ -1,134 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Losses used for segmentation models."""
-
-# Import libraries
-import tensorflow as tf
-
-from official.modeling import tf_utils
-
-EPSILON = 1e-5
-
-
-class SegmentationLoss:
- """Semantic segmentation loss."""
-
- def __init__(self, label_smoothing, class_weights, ignore_label,
- use_groundtruth_dimension, top_k_percent_pixels=1.0):
- self._top_k_percent_pixels = top_k_percent_pixels
- self._class_weights = class_weights
- self._ignore_label = ignore_label
- self._use_groundtruth_dimension = use_groundtruth_dimension
- self._label_smoothing = label_smoothing
-
- def __call__(self, logits, labels):
- _, height, width, num_classes = logits.get_shape().as_list()
-
- if self._use_groundtruth_dimension:
- # TODO(arashwan): Test using align corners to match deeplab alignment.
- logits = tf.image.resize(
- logits, tf.shape(labels)[1:3],
- method=tf.image.ResizeMethod.BILINEAR)
- else:
- labels = tf.image.resize(
- labels, (height, width),
- method=tf.image.ResizeMethod.NEAREST_NEIGHBOR)
-
- valid_mask = tf.not_equal(labels, self._ignore_label)
- normalizer = tf.reduce_sum(tf.cast(valid_mask, tf.float32)) + EPSILON
- # Assign pixel with ignore label to class 0 (background). The loss on the
- # pixel will later be masked out.
- labels = tf.where(valid_mask, labels, tf.zeros_like(labels))
-
- labels = tf.squeeze(tf.cast(labels, tf.int32), axis=3)
- valid_mask = tf.squeeze(tf.cast(valid_mask, tf.float32), axis=3)
- onehot_labels = tf.one_hot(labels, num_classes)
- onehot_labels = onehot_labels * (
- 1 - self._label_smoothing) + self._label_smoothing / num_classes
- cross_entropy_loss = tf.nn.softmax_cross_entropy_with_logits(
- labels=onehot_labels, logits=logits)
-
- if not self._class_weights:
- class_weights = [1] * num_classes
- else:
- class_weights = self._class_weights
-
- if num_classes != len(class_weights):
- raise ValueError(
- 'Length of class_weights should be {}'.format(num_classes))
-
- weight_mask = tf.einsum('...y,y->...',
- tf.one_hot(labels, num_classes, dtype=tf.float32),
- tf.constant(class_weights, tf.float32))
- valid_mask *= weight_mask
- cross_entropy_loss *= tf.cast(valid_mask, tf.float32)
-
- if self._top_k_percent_pixels >= 1.0:
- loss = tf.reduce_sum(cross_entropy_loss) / normalizer
- else:
- cross_entropy_loss = tf.reshape(cross_entropy_loss, shape=[-1])
- top_k_pixels = tf.cast(
- self._top_k_percent_pixels *
- tf.cast(tf.size(cross_entropy_loss), tf.float32), tf.int32)
- top_k_losses, _ = tf.math.top_k(
- cross_entropy_loss, k=top_k_pixels, sorted=True)
- normalizer = tf.reduce_sum(
- tf.cast(tf.not_equal(top_k_losses, 0.0), tf.float32)) + EPSILON
- loss = tf.reduce_sum(top_k_losses) / normalizer
-
- return loss
-
-
-def get_actual_mask_scores(logits, labels, ignore_label):
- """Gets actual mask scores."""
- _, height, width, num_classes = logits.get_shape().as_list()
- batch_size = tf.shape(logits)[0]
- logits = tf.stop_gradient(logits)
- labels = tf.image.resize(
- labels, (height, width),
- method=tf.image.ResizeMethod.NEAREST_NEIGHBOR)
- predicted_labels = tf.argmax(logits, -1, output_type=tf.int32)
- flat_predictions = tf.reshape(predicted_labels, [batch_size, -1])
- flat_labels = tf.cast(tf.reshape(labels, [batch_size, -1]), tf.int32)
-
- one_hot_predictions = tf.one_hot(
- flat_predictions, num_classes, on_value=True, off_value=False)
- one_hot_labels = tf.one_hot(
- flat_labels, num_classes, on_value=True, off_value=False)
- keep_mask = tf.not_equal(flat_labels, ignore_label)
- keep_mask = tf.expand_dims(keep_mask, 2)
-
- overlap = tf.logical_and(one_hot_predictions, one_hot_labels)
- overlap = tf.logical_and(overlap, keep_mask)
- overlap = tf.reduce_sum(tf.cast(overlap, tf.float32), axis=1)
- union = tf.logical_or(one_hot_predictions, one_hot_labels)
- union = tf.logical_and(union, keep_mask)
- union = tf.reduce_sum(tf.cast(union, tf.float32), axis=1)
- actual_scores = tf.divide(overlap, tf.maximum(union, EPSILON))
- return actual_scores
-
-
-class MaskScoringLoss:
- """Mask Scoring loss."""
-
- def __init__(self, ignore_label):
- self._ignore_label = ignore_label
- self._mse_loss = tf.keras.losses.MeanSquaredError(
- reduction=tf.keras.losses.Reduction.NONE)
-
- def __call__(self, predicted_scores, logits, labels):
- actual_scores = get_actual_mask_scores(logits, labels, self._ignore_label)
- loss = tf_utils.safe_mean(self._mse_loss(actual_scores, predicted_scores))
- return loss
diff --git a/official/vision/beta/modeling/__init__.py b/official/vision/beta/modeling/__init__.py
deleted file mode 100644
index 444b1a1e9b521558945d424b5f32483e7da17d21..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/__init__.py
+++ /dev/null
@@ -1,21 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Modeling package definition."""
-
-from official.vision.beta.modeling import backbones
-from official.vision.beta.modeling import decoders
-from official.vision.beta.modeling import heads
-from official.vision.beta.modeling import layers
diff --git a/official/vision/beta/modeling/backbones/__init__.py b/official/vision/beta/modeling/backbones/__init__.py
deleted file mode 100644
index ca6ca1bca973e9d5b8b898d837247723b2adb4c6..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/__init__.py
+++ /dev/null
@@ -1,26 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Backbones package definition."""
-
-from official.vision.beta.modeling.backbones.efficientnet import EfficientNet
-from official.vision.beta.modeling.backbones.mobiledet import MobileDet
-from official.vision.beta.modeling.backbones.mobilenet import MobileNet
-from official.vision.beta.modeling.backbones.resnet import ResNet
-from official.vision.beta.modeling.backbones.resnet_3d import ResNet3D
-from official.vision.beta.modeling.backbones.resnet_deeplab import DilatedResNet
-from official.vision.beta.modeling.backbones.revnet import RevNet
-from official.vision.beta.modeling.backbones.spinenet import SpineNet
-from official.vision.beta.modeling.backbones.spinenet_mobile import SpineNetMobile
diff --git a/official/vision/beta/modeling/backbones/efficientnet.py b/official/vision/beta/modeling/backbones/efficientnet.py
deleted file mode 100644
index 2d3e4b12b6c1bec4bd67bbded440bb3f3aa6db88..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/efficientnet.py
+++ /dev/null
@@ -1,318 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains definitions of EfficientNet Networks."""
-
-import math
-from typing import Any, List, Tuple
-
-# Import libraries
-
-import tensorflow as tf
-
-from official.modeling import hyperparams
-from official.modeling import tf_utils
-from official.vision.beta.modeling.backbones import factory
-from official.vision.beta.modeling.layers import nn_blocks
-from official.vision.beta.modeling.layers import nn_layers
-
-layers = tf.keras.layers
-
-# The fixed EfficientNet-B0 architecture discovered by NAS.
-# Each element represents a specification of a building block:
-# (block_fn, block_repeats, kernel_size, strides, expand_ratio, in_filters,
-# out_filters, is_output)
-EN_B0_BLOCK_SPECS = [
- ('mbconv', 1, 3, 1, 1, 32, 16, False),
- ('mbconv', 2, 3, 2, 6, 16, 24, True),
- ('mbconv', 2, 5, 2, 6, 24, 40, True),
- ('mbconv', 3, 3, 2, 6, 40, 80, False),
- ('mbconv', 3, 5, 1, 6, 80, 112, True),
- ('mbconv', 4, 5, 2, 6, 112, 192, False),
- ('mbconv', 1, 3, 1, 6, 192, 320, True),
-]
-
-SCALING_MAP = {
- 'b0': dict(width_scale=1.0, depth_scale=1.0),
- 'b1': dict(width_scale=1.0, depth_scale=1.1),
- 'b2': dict(width_scale=1.1, depth_scale=1.2),
- 'b3': dict(width_scale=1.2, depth_scale=1.4),
- 'b4': dict(width_scale=1.4, depth_scale=1.8),
- 'b5': dict(width_scale=1.6, depth_scale=2.2),
- 'b6': dict(width_scale=1.8, depth_scale=2.6),
- 'b7': dict(width_scale=2.0, depth_scale=3.1),
-}
-
-
-class BlockSpec():
- """A container class that specifies the block configuration for MnasNet."""
-
- def __init__(self, block_fn: str, block_repeats: int, kernel_size: int,
- strides: int, expand_ratio: float, in_filters: int,
- out_filters: int, is_output: bool, width_scale: float,
- depth_scale: float):
- self.block_fn = block_fn
- self.block_repeats = round_repeats(block_repeats, depth_scale)
- self.kernel_size = kernel_size
- self.strides = strides
- self.expand_ratio = expand_ratio
- self.in_filters = nn_layers.round_filters(in_filters, width_scale)
- self.out_filters = nn_layers.round_filters(out_filters, width_scale)
- self.is_output = is_output
-
-
-def round_repeats(repeats: int, multiplier: float, skip: bool = False) -> int:
- """Returns rounded number of filters based on depth multiplier."""
- if skip or not multiplier:
- return repeats
- return int(math.ceil(multiplier * repeats))
-
-
-def block_spec_decoder(specs: List[Tuple[Any, ...]], width_scale: float,
- depth_scale: float) -> List[BlockSpec]:
- """Decodes and returns specs for a block."""
- decoded_specs = []
- for s in specs:
- s = s + (
- width_scale,
- depth_scale,
- )
- decoded_specs.append(BlockSpec(*s))
- return decoded_specs
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class EfficientNet(tf.keras.Model):
- """Creates an EfficientNet family model.
-
- This implements the EfficientNet model from:
- Mingxing Tan, Quoc V. Le.
- EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks.
- (https://arxiv.org/pdf/1905.11946)
- """
-
- def __init__(self,
- model_id: str,
- input_specs: tf.keras.layers.InputSpec = layers.InputSpec(
- shape=[None, None, None, 3]),
- se_ratio: float = 0.0,
- stochastic_depth_drop_rate: float = 0.0,
- kernel_initializer: str = 'VarianceScaling',
- kernel_regularizer: tf.keras.regularizers.Regularizer = None,
- bias_regularizer: tf.keras.regularizers.Regularizer = None,
- activation: str = 'relu',
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001, # pytype: disable=annotation-type-mismatch # typed-keras
- **kwargs):
- """Initializes an EfficientNet model.
-
- Args:
- model_id: A `str` of model ID of EfficientNet.
- input_specs: A `tf.keras.layers.InputSpec` of the input tensor.
- se_ratio: A `float` of squeeze and excitation ratio for inverted
- bottleneck blocks.
- stochastic_depth_drop_rate: A `float` of drop rate for drop connect layer.
- kernel_initializer: A `str` for kernel initializer of convolutional
- layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default to None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2D.
- Default to None.
- activation: A `str` of name of the activation function.
- use_sync_bn: If True, use synchronized batch normalization.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- **kwargs: Additional keyword arguments to be passed.
- """
- self._model_id = model_id
- self._input_specs = input_specs
- self._se_ratio = se_ratio
- self._stochastic_depth_drop_rate = stochastic_depth_drop_rate
- self._use_sync_bn = use_sync_bn
- self._activation = activation
- self._kernel_initializer = kernel_initializer
- self._norm_momentum = norm_momentum
- self._norm_epsilon = norm_epsilon
- self._kernel_regularizer = kernel_regularizer
- self._bias_regularizer = bias_regularizer
- if use_sync_bn:
- self._norm = layers.experimental.SyncBatchNormalization
- else:
- self._norm = layers.BatchNormalization
-
- if tf.keras.backend.image_data_format() == 'channels_last':
- bn_axis = -1
- else:
- bn_axis = 1
-
- # Build EfficientNet.
- inputs = tf.keras.Input(shape=input_specs.shape[1:])
- width_scale = SCALING_MAP[model_id]['width_scale']
- depth_scale = SCALING_MAP[model_id]['depth_scale']
-
- # Build stem.
- x = layers.Conv2D(
- filters=nn_layers.round_filters(32, width_scale),
- kernel_size=3,
- strides=2,
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- inputs)
- x = self._norm(
- axis=bn_axis, momentum=norm_momentum, epsilon=norm_epsilon)(
- x)
- x = tf_utils.get_activation(activation)(x)
-
- # Build intermediate blocks.
- endpoints = {}
- endpoint_level = 2
- decoded_specs = block_spec_decoder(EN_B0_BLOCK_SPECS, width_scale,
- depth_scale)
-
- for i, specs in enumerate(decoded_specs):
- x = self._block_group(
- inputs=x, specs=specs, name='block_group_{}'.format(i))
- if specs.is_output:
- endpoints[str(endpoint_level)] = x
- endpoint_level += 1
-
- # Build output specs for downstream tasks.
- self._output_specs = {l: endpoints[l].get_shape() for l in endpoints}
-
- # Build the final conv for classification.
- x = layers.Conv2D(
- filters=nn_layers.round_filters(1280, width_scale),
- kernel_size=1,
- strides=1,
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- x)
- x = self._norm(
- axis=bn_axis, momentum=norm_momentum, epsilon=norm_epsilon)(
- x)
- endpoints[str(endpoint_level)] = tf_utils.get_activation(activation)(x)
-
- super(EfficientNet, self).__init__(
- inputs=inputs, outputs=endpoints, **kwargs)
-
- def _block_group(self,
- inputs: tf.Tensor,
- specs: BlockSpec,
- name: str = 'block_group'):
- """Creates one group of blocks for the EfficientNet model.
-
- Args:
- inputs: A `tf.Tensor` of size `[batch, channels, height, width]`.
- specs: The specifications for one inverted bottleneck block group.
- name: A `str` name for the block.
-
- Returns:
- The output `tf.Tensor` of the block layer.
- """
- if specs.block_fn == 'mbconv':
- block_fn = nn_blocks.InvertedBottleneckBlock
- else:
- raise ValueError('Block func {} not supported.'.format(specs.block_fn))
-
- x = block_fn(
- in_filters=specs.in_filters,
- out_filters=specs.out_filters,
- expand_ratio=specs.expand_ratio,
- strides=specs.strides,
- kernel_size=specs.kernel_size,
- se_ratio=self._se_ratio,
- stochastic_depth_drop_rate=self._stochastic_depth_drop_rate,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer,
- activation=self._activation,
- use_sync_bn=self._use_sync_bn,
- norm_momentum=self._norm_momentum,
- norm_epsilon=self._norm_epsilon)(
- inputs)
-
- for _ in range(1, specs.block_repeats):
- x = block_fn(
- in_filters=specs.out_filters, # Set 'in_filters' to 'out_filters'.
- out_filters=specs.out_filters,
- expand_ratio=specs.expand_ratio,
- strides=1, # Fix strides to 1.
- kernel_size=specs.kernel_size,
- se_ratio=self._se_ratio,
- stochastic_depth_drop_rate=self._stochastic_depth_drop_rate,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer,
- activation=self._activation,
- use_sync_bn=self._use_sync_bn,
- norm_momentum=self._norm_momentum,
- norm_epsilon=self._norm_epsilon)(
- x)
-
- return tf.identity(x, name=name)
-
- def get_config(self):
- config_dict = {
- 'model_id': self._model_id,
- 'se_ratio': self._se_ratio,
- 'stochastic_depth_drop_rate': self._stochastic_depth_drop_rate,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- 'bias_regularizer': self._bias_regularizer,
- 'activation': self._activation,
- 'use_sync_bn': self._use_sync_bn,
- 'norm_momentum': self._norm_momentum,
- 'norm_epsilon': self._norm_epsilon
- }
- return config_dict
-
- @classmethod
- def from_config(cls, config, custom_objects=None):
- return cls(**config)
-
- @property
- def output_specs(self):
- """A dict of {level: TensorShape} pairs for the model output."""
- return self._output_specs
-
-
-@factory.register_backbone_builder('efficientnet')
-def build_efficientnet(
- input_specs: tf.keras.layers.InputSpec,
- backbone_config: hyperparams.Config,
- norm_activation_config: hyperparams.Config,
- l2_regularizer: tf.keras.regularizers.Regularizer = None) -> tf.keras.Model: # pytype: disable=annotation-type-mismatch # typed-keras
- """Builds EfficientNet backbone from a config."""
- backbone_type = backbone_config.type
- backbone_cfg = backbone_config.get()
- assert backbone_type == 'efficientnet', (f'Inconsistent backbone type '
- f'{backbone_type}')
-
- return EfficientNet(
- model_id=backbone_cfg.model_id,
- input_specs=input_specs,
- stochastic_depth_drop_rate=backbone_cfg.stochastic_depth_drop_rate,
- se_ratio=backbone_cfg.se_ratio,
- activation=norm_activation_config.activation,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon,
- kernel_regularizer=l2_regularizer)
diff --git a/official/vision/beta/modeling/backbones/efficientnet_test.py b/official/vision/beta/modeling/backbones/efficientnet_test.py
deleted file mode 100644
index 9bddf88890180666dabba05435237bae5a7a8b8d..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/efficientnet_test.py
+++ /dev/null
@@ -1,104 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for EfficientNet."""
-
-# Import libraries
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.vision.beta.modeling.backbones import efficientnet
-
-
-class EfficientNetTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(32, 224)
- def test_network_creation(self, input_size):
- """Test creation of EfficientNet family models."""
- tf.keras.backend.set_image_data_format('channels_last')
-
- network = efficientnet.EfficientNet(model_id='b0')
-
- inputs = tf.keras.Input(shape=(input_size, input_size, 3), batch_size=1)
- endpoints = network(inputs)
-
- self.assertAllEqual([1, input_size / 2**2, input_size / 2**2, 24],
- endpoints['2'].shape.as_list())
- self.assertAllEqual([1, input_size / 2**3, input_size / 2**3, 40],
- endpoints['3'].shape.as_list())
- self.assertAllEqual([1, input_size / 2**4, input_size / 2**4, 112],
- endpoints['4'].shape.as_list())
- self.assertAllEqual([1, input_size / 2**5, input_size / 2**5, 320],
- endpoints['5'].shape.as_list())
-
- @parameterized.parameters('b0', 'b3', 'b6')
- def test_network_scaling(self, model_id):
- """Test compound scaling."""
- efficientnet_params = {
- 'b0': 4049564,
- 'b3': 10783528,
- 'b6': 40960136,
- }
- tf.keras.backend.set_image_data_format('channels_last')
-
- input_size = 32
- network = efficientnet.EfficientNet(model_id=model_id, se_ratio=0.25)
- self.assertEqual(network.count_params(), efficientnet_params[model_id])
-
- inputs = tf.keras.Input(shape=(input_size, input_size, 3), batch_size=1)
- _ = network(inputs)
-
- @parameterized.parameters(1, 3)
- def test_input_specs(self, input_dim):
- """Test different input feature dimensions."""
- tf.keras.backend.set_image_data_format('channels_last')
-
- input_specs = tf.keras.layers.InputSpec(shape=[None, None, None, input_dim])
- network = efficientnet.EfficientNet(model_id='b0', input_specs=input_specs)
-
- inputs = tf.keras.Input(shape=(128, 128, input_dim), batch_size=1)
- _ = network(inputs)
-
- def test_serialize_deserialize(self):
- # Create a network object that sets all of its config options.
- kwargs = dict(
- model_id='b0',
- se_ratio=0.25,
- stochastic_depth_drop_rate=None,
- use_sync_bn=False,
- kernel_initializer='VarianceScaling',
- kernel_regularizer=None,
- bias_regularizer=None,
- activation='relu',
- norm_momentum=0.99,
- norm_epsilon=0.001,
- )
- network = efficientnet.EfficientNet(**kwargs)
-
- expected_config = dict(kwargs)
- self.assertEqual(network.get_config(), expected_config)
-
- # Create another network object from the first object's config.
- new_network = efficientnet.EfficientNet.from_config(network.get_config())
-
- # Validate that the config can be forced to JSON.
- _ = new_network.to_json()
-
- # If the serialization was successful, the new config should match the old.
- self.assertAllEqual(network.get_config(), new_network.get_config())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/backbones/factory.py b/official/vision/beta/modeling/backbones/factory.py
deleted file mode 100644
index 1f695413f915d6b264327dce3c9973eeafb60ab1..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/factory.py
+++ /dev/null
@@ -1,113 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Backbone registers and factory method.
-
-One can regitered a new backbone model by the following two steps:
-
-1 Import the factory and register the build in the backbone file.
-2 Import the backbone class and add a build in __init__.py.
-
-```
-# my_backbone.py
-
-from modeling.backbones import factory
-
-class MyBackbone():
- ...
-
-@factory.register_backbone_builder('my_backbone')
-def build_my_backbone():
- return MyBackbone()
-
-# backbones/__init__.py adds import
-from modeling.backbones.my_backbone import MyBackbone
-```
-
-If one wants the MyBackbone class to be used only by those binary
-then don't imported the backbone module in backbones/__init__.py, but import it
-in place that uses it.
-
-
-"""
-from typing import Sequence, Union
-
-# Import libraries
-
-import tensorflow as tf
-
-from official.core import registry
-from official.modeling import hyperparams
-
-
-_REGISTERED_BACKBONE_CLS = {}
-
-
-def register_backbone_builder(key: str):
- """Decorates a builder of backbone class.
-
- The builder should be a Callable (a class or a function).
- This decorator supports registration of backbone builder as follows:
-
- ```
- class MyBackbone(tf.keras.Model):
- pass
-
- @register_backbone_builder('mybackbone')
- def builder(input_specs, config, l2_reg):
- return MyBackbone(...)
-
- # Builds a MyBackbone object.
- my_backbone = build_backbone_3d(input_specs, config, l2_reg)
- ```
-
- Args:
- key: A `str` of key to look up the builder.
-
- Returns:
- A callable for using as class decorator that registers the decorated class
- for creation from an instance of task_config_cls.
- """
- return registry.register(_REGISTERED_BACKBONE_CLS, key)
-
-
-def build_backbone(input_specs: Union[tf.keras.layers.InputSpec,
- Sequence[tf.keras.layers.InputSpec]],
- backbone_config: hyperparams.Config,
- norm_activation_config: hyperparams.Config,
- l2_regularizer: tf.keras.regularizers.Regularizer = None,
- **kwargs) -> tf.keras.Model: # pytype: disable=annotation-type-mismatch # typed-keras
- """Builds backbone from a config.
-
- Args:
- input_specs: A (sequence of) `tf.keras.layers.InputSpec` of input.
- backbone_config: A `OneOfConfig` of backbone config.
- norm_activation_config: A config for normalization/activation layer.
- l2_regularizer: A `tf.keras.regularizers.Regularizer` object. Default to
- None.
- **kwargs: Additional keyword args to be passed to backbone builder.
-
- Returns:
- A `tf.keras.Model` instance of the backbone.
- """
- backbone_builder = registry.lookup(_REGISTERED_BACKBONE_CLS,
- backbone_config.type)
-
- return backbone_builder(
- input_specs=input_specs,
- backbone_config=backbone_config,
- norm_activation_config=norm_activation_config,
- l2_regularizer=l2_regularizer,
- **kwargs)
diff --git a/official/vision/beta/modeling/backbones/factory_test.py b/official/vision/beta/modeling/backbones/factory_test.py
deleted file mode 100644
index c011f49a67798db0a35b10454d94cbf4406bbe3c..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/factory_test.py
+++ /dev/null
@@ -1,228 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for factory functions."""
-# Import libraries
-from absl.testing import parameterized
-import tensorflow as tf
-
-from tensorflow.python.distribute import combinations
-from official.vision.beta.configs import backbones as backbones_cfg
-from official.vision.beta.configs import backbones_3d as backbones_3d_cfg
-from official.vision.beta.configs import common as common_cfg
-from official.vision.beta.modeling import backbones
-from official.vision.beta.modeling.backbones import factory
-
-
-class FactoryTest(tf.test.TestCase, parameterized.TestCase):
-
- @combinations.generate(
- combinations.combine(model_id=[18, 34, 50, 101, 152],))
- def test_resnet_creation(self, model_id):
- """Test creation of ResNet models."""
-
- network = backbones.ResNet(
- model_id=model_id, se_ratio=0.0, norm_momentum=0.99, norm_epsilon=1e-5)
-
- backbone_config = backbones_cfg.Backbone(
- type='resnet',
- resnet=backbones_cfg.ResNet(model_id=model_id, se_ratio=0.0))
- norm_activation_config = common_cfg.NormActivation(
- norm_momentum=0.99, norm_epsilon=1e-5, use_sync_bn=False)
-
- factory_network = factory.build_backbone(
- input_specs=tf.keras.layers.InputSpec(shape=[None, None, None, 3]),
- backbone_config=backbone_config,
- norm_activation_config=norm_activation_config)
-
- network_config = network.get_config()
- factory_network_config = factory_network.get_config()
-
- self.assertEqual(network_config, factory_network_config)
-
- @combinations.generate(
- combinations.combine(
- model_id=['b0', 'b1', 'b2', 'b3', 'b4', 'b5', 'b6', 'b7'],
- se_ratio=[0.0, 0.25],
- ))
- def test_efficientnet_creation(self, model_id, se_ratio):
- """Test creation of EfficientNet models."""
-
- network = backbones.EfficientNet(
- model_id=model_id,
- se_ratio=se_ratio,
- norm_momentum=0.99,
- norm_epsilon=1e-5)
-
- backbone_config = backbones_cfg.Backbone(
- type='efficientnet',
- efficientnet=backbones_cfg.EfficientNet(
- model_id=model_id, se_ratio=se_ratio))
- norm_activation_config = common_cfg.NormActivation(
- norm_momentum=0.99, norm_epsilon=1e-5, use_sync_bn=False)
-
- factory_network = factory.build_backbone(
- input_specs=tf.keras.layers.InputSpec(shape=[None, None, None, 3]),
- backbone_config=backbone_config,
- norm_activation_config=norm_activation_config)
-
- network_config = network.get_config()
- factory_network_config = factory_network.get_config()
-
- self.assertEqual(network_config, factory_network_config)
-
- @combinations.generate(
- combinations.combine(
- model_id=['MobileNetV1', 'MobileNetV2',
- 'MobileNetV3Large', 'MobileNetV3Small',
- 'MobileNetV3EdgeTPU'],
- filter_size_scale=[1.0, 0.75],
- ))
- def test_mobilenet_creation(self, model_id, filter_size_scale):
- """Test creation of Mobilenet models."""
-
- network = backbones.MobileNet(
- model_id=model_id,
- filter_size_scale=filter_size_scale,
- norm_momentum=0.99,
- norm_epsilon=1e-5)
-
- backbone_config = backbones_cfg.Backbone(
- type='mobilenet',
- mobilenet=backbones_cfg.MobileNet(
- model_id=model_id, filter_size_scale=filter_size_scale))
- norm_activation_config = common_cfg.NormActivation(
- norm_momentum=0.99, norm_epsilon=1e-5, use_sync_bn=False)
-
- factory_network = factory.build_backbone(
- input_specs=tf.keras.layers.InputSpec(shape=[None, None, None, 3]),
- backbone_config=backbone_config,
- norm_activation_config=norm_activation_config)
-
- network_config = network.get_config()
- factory_network_config = factory_network.get_config()
-
- self.assertEqual(network_config, factory_network_config)
-
- @combinations.generate(combinations.combine(model_id=['49'],))
- def test_spinenet_creation(self, model_id):
- """Test creation of SpineNet models."""
- input_size = 128
- min_level = 3
- max_level = 7
-
- input_specs = tf.keras.layers.InputSpec(
- shape=[None, input_size, input_size, 3])
- network = backbones.SpineNet(
- input_specs=input_specs,
- min_level=min_level,
- max_level=max_level,
- norm_momentum=0.99,
- norm_epsilon=1e-5)
-
- backbone_config = backbones_cfg.Backbone(
- type='spinenet',
- spinenet=backbones_cfg.SpineNet(model_id=model_id))
- norm_activation_config = common_cfg.NormActivation(
- norm_momentum=0.99, norm_epsilon=1e-5, use_sync_bn=False)
-
- factory_network = factory.build_backbone(
- input_specs=tf.keras.layers.InputSpec(
- shape=[None, input_size, input_size, 3]),
- backbone_config=backbone_config,
- norm_activation_config=norm_activation_config)
-
- network_config = network.get_config()
- factory_network_config = factory_network.get_config()
-
- self.assertEqual(network_config, factory_network_config)
-
- @combinations.generate(
- combinations.combine(model_id=[38, 56, 104],))
- def test_revnet_creation(self, model_id):
- """Test creation of RevNet models."""
- network = backbones.RevNet(
- model_id=model_id, norm_momentum=0.99, norm_epsilon=1e-5)
-
- backbone_config = backbones_cfg.Backbone(
- type='revnet',
- revnet=backbones_cfg.RevNet(model_id=model_id))
- norm_activation_config = common_cfg.NormActivation(
- norm_momentum=0.99, norm_epsilon=1e-5, use_sync_bn=False)
-
- factory_network = factory.build_backbone(
- input_specs=tf.keras.layers.InputSpec(shape=[None, None, None, 3]),
- backbone_config=backbone_config,
- norm_activation_config=norm_activation_config)
-
- network_config = network.get_config()
- factory_network_config = factory_network.get_config()
-
- self.assertEqual(network_config, factory_network_config)
-
- @combinations.generate(combinations.combine(model_type=['resnet_3d'],))
- def test_resnet_3d_creation(self, model_type):
- """Test creation of ResNet 3D models."""
- backbone_cfg = backbones_3d_cfg.Backbone3D(type=model_type).get()
- temporal_strides = []
- temporal_kernel_sizes = []
- for block_spec in backbone_cfg.block_specs:
- temporal_strides.append(block_spec.temporal_strides)
- temporal_kernel_sizes.append(block_spec.temporal_kernel_sizes)
-
- _ = backbones.ResNet3D(
- model_id=backbone_cfg.model_id,
- temporal_strides=temporal_strides,
- temporal_kernel_sizes=temporal_kernel_sizes,
- norm_momentum=0.99,
- norm_epsilon=1e-5)
-
- @combinations.generate(
- combinations.combine(
- model_id=[
- 'MobileDetCPU',
- 'MobileDetDSP',
- 'MobileDetEdgeTPU',
- 'MobileDetGPU'],
- filter_size_scale=[1.0, 0.75],
- ))
- def test_mobiledet_creation(self, model_id, filter_size_scale):
- """Test creation of Mobiledet models."""
-
- network = backbones.MobileDet(
- model_id=model_id,
- filter_size_scale=filter_size_scale,
- norm_momentum=0.99,
- norm_epsilon=1e-5)
-
- backbone_config = backbones_cfg.Backbone(
- type='mobiledet',
- mobiledet=backbones_cfg.MobileDet(
- model_id=model_id, filter_size_scale=filter_size_scale))
- norm_activation_config = common_cfg.NormActivation(
- norm_momentum=0.99, norm_epsilon=1e-5, use_sync_bn=False)
-
- factory_network = factory.build_backbone(
- input_specs=tf.keras.layers.InputSpec(shape=[None, None, None, 3]),
- backbone_config=backbone_config,
- norm_activation_config=norm_activation_config)
-
- network_config = network.get_config()
- factory_network_config = factory_network.get_config()
-
- self.assertEqual(network_config, factory_network_config)
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/backbones/mobiledet.py b/official/vision/beta/modeling/backbones/mobiledet.py
deleted file mode 100644
index 8bbd6691fd3f6c5c86ac712283845f3f522707af..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/mobiledet.py
+++ /dev/null
@@ -1,579 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Definitions of MobileDet Networks."""
-
-import dataclasses
-from typing import Any, Dict, Optional, Tuple, List
-
-import tensorflow as tf
-
-from official.modeling import hyperparams
-from official.vision.beta.modeling.backbones import factory
-from official.vision.beta.modeling.backbones import mobilenet
-from official.vision.beta.modeling.layers import nn_blocks
-from official.vision.beta.modeling.layers import nn_layers
-
-
-layers = tf.keras.layers
-
-
-# pylint: disable=pointless-string-statement
-
-"""
-Architecture: https://arxiv.org/abs/1704.04861.
-
-"MobileDets: Searching for Object Detection Architectures for
-Mobile Accelerators" Yunyang Xiong, Hanxiao Liu, Suyog Gupta, Berkin Akin,
-Gabriel Bender, Yongzhe Wang, Pieter-Jan Kindermans, Mingxing Tan, Vikas Singh,
-Bo Chen
-
-Note that `round_down_protection` flag should be set to false for scaling
-of the network.
-"""
-
-MD_CPU_BLOCK_SPECS = {
- 'spec_name': 'MobileDetCPU',
- # [expand_ratio] is set to 1 and [use_residual] is set to false
- # for inverted_bottleneck_no_expansion
- # [se_ratio] is set to 0.25 for all inverted_bottleneck layers
- # [activation] is set to 'hard_swish' for all applicable layers
- 'block_spec_schema': ['block_fn', 'kernel_size', 'strides', 'filters',
- 'activation', 'se_ratio', 'expand_ratio',
- 'use_residual', 'is_output'],
- 'block_specs': [
- ('convbn', 3, 2, 16, 'hard_swish', None, None, None, False),
- # inverted_bottleneck_no_expansion
- ('invertedbottleneck', 3, 1, 8, 'hard_swish', 0.25, 1., False, True),
- ('invertedbottleneck', 3, 2, 16, 'hard_swish', 0.25, 4., False, True),
- ('invertedbottleneck', 3, 2, 32, 'hard_swish', 0.25, 8., False, False),
- ('invertedbottleneck', 3, 1, 32, 'hard_swish', 0.25, 4., True, False),
- ('invertedbottleneck', 3, 1, 32, 'hard_swish', 0.25, 4., True, False),
- ('invertedbottleneck', 3, 1, 32, 'hard_swish', 0.25, 4., True, True),
- ('invertedbottleneck', 5, 2, 72, 'hard_swish', 0.25, 8., False, False),
- ('invertedbottleneck', 3, 1, 72, 'hard_swish', 0.25, 8., True, False),
- ('invertedbottleneck', 5, 1, 72, 'hard_swish', 0.25, 4., True, False),
- ('invertedbottleneck', 3, 1, 72, 'hard_swish', 0.25, 4., True, False),
- ('invertedbottleneck', 3, 1, 72, 'hard_swish', 0.25, 8., False, False),
- ('invertedbottleneck', 3, 1, 72, 'hard_swish', 0.25, 8., True, False),
- ('invertedbottleneck', 3, 1, 72, 'hard_swish', 0.25, 8., True, False),
- ('invertedbottleneck', 3, 1, 72, 'hard_swish', 0.25, 8., True, True),
- ('invertedbottleneck', 5, 2, 104, 'hard_swish', 0.25, 8., False, False),
- ('invertedbottleneck', 5, 1, 104, 'hard_swish', 0.25, 4., True, False),
- ('invertedbottleneck', 5, 1, 104, 'hard_swish', 0.25, 4., True, False),
- ('invertedbottleneck', 3, 1, 104, 'hard_swish', 0.25, 4., True, False),
- ('invertedbottleneck', 3, 1, 144, 'hard_swish', 0.25, 8., False, True),
- ]
-}
-
-MD_DSP_BLOCK_SPECS = {
- 'spec_name': 'MobileDetDSP',
- # [expand_ratio] is set to 1 and [use_residual] is set to false
- # for inverted_bottleneck_no_expansion
- # [use_depthwise] is set to False for fused_conv
- # [se_ratio] is set to None for all inverted_bottleneck layers
- # [activation] is set to 'relu6' for all applicable layers
- 'block_spec_schema': ['block_fn', 'kernel_size', 'strides', 'filters',
- 'activation', 'se_ratio', 'expand_ratio',
- 'input_compression_ratio', 'output_compression_ratio',
- 'use_depthwise', 'use_residual', 'is_output'],
- 'block_specs': [
- ('convbn', 3, 2, 32, 'relu6',
- None, None, None, None, None, None, False),
- # inverted_bottleneck_no_expansion
- ('invertedbottleneck', 3, 1, 24, 'relu6',
- None, 1., None, None, True, False, True),
- ('invertedbottleneck', 3, 2, 32, 'relu6',
- None, 4., None, None, False, False, False), # fused_conv
- ('invertedbottleneck', 3, 1, 32, 'relu6',
- None, 4., None, None, False, True, False), # fused_conv
- ('invertedbottleneck', 3, 1, 32, 'relu6',
- None, 4., None, None, True, True, False),
- ('tucker', 3, 1, 32, 'relu6',
- None, None, 0.25, 0.75, None, True, True),
- ('invertedbottleneck', 3, 2, 64, 'relu6',
- None, 8., None, None, False, False, False), # fused_conv
- ('invertedbottleneck', 3, 1, 64, 'relu6',
- None, 4., None, None, True, True, False),
- ('invertedbottleneck', 3, 1, 64, 'relu6',
- None, 4., None, None, False, True, False), # fused_conv
- ('invertedbottleneck', 3, 1, 64, 'relu6',
- None, 4., None, None, False, True, True), # fused_conv
- ('invertedbottleneck', 3, 2, 120, 'relu6',
- None, 8., None, None, False, False, False), # fused_conv
- ('invertedbottleneck', 3, 1, 120, 'relu6',
- None, 4., None, None, True, True, False),
- ('invertedbottleneck', 3, 1, 120, 'relu6',
- None, 8, None, None, True, True, False),
- ('invertedbottleneck', 3, 1, 120, 'relu6',
- None, 8., None, None, True, True, False),
- ('invertedbottleneck', 3, 1, 144, 'relu6',
- None, 8., None, None, False, False, False), # fused_conv
- ('invertedbottleneck', 3, 1, 144, 'relu6',
- None, 8., None, None, True, True, False),
- ('invertedbottleneck', 3, 1, 144, 'relu6',
- None, 8, None, None, True, True, False),
- ('invertedbottleneck', 3, 1, 144, 'relu6',
- None, 8., None, None, True, True, True),
- ('invertedbottleneck', 3, 2, 160, 'relu6',
- None, 4, None, None, True, False, False),
- ('invertedbottleneck', 3, 1, 160, 'relu6',
- None, 4, None, None, True, True, False),
- ('invertedbottleneck', 3, 1, 160, 'relu6',
- None, 4., None, None, False, False, False), # fused_conv
- ('tucker', 3, 1, 160, 'relu6',
- None, None, 0.75, 0.75, None, True, False),
- ('invertedbottleneck', 3, 1, 240, 'relu6',
- None, 8, None, None, True, False, True),
- ]
-}
-
-MD_EdgeTPU_BLOCK_SPECS = {
- 'spec_name': 'MobileDetEdgeTPU',
- # [use_depthwise] is set to False for fused_conv
- # [se_ratio] is set to None for all inverted_bottleneck layers
- # [activation] is set to 'relu6' for all applicable layers
- 'block_spec_schema': ['block_fn', 'kernel_size', 'strides', 'filters',
- 'activation', 'se_ratio', 'expand_ratio',
- 'input_compression_ratio', 'output_compression_ratio',
- 'use_depthwise', 'use_residual', 'is_output'],
- 'block_specs': [
- ('convbn', 3, 2, 32, 'relu6',
- None, None, None, None, None, None, False),
- ('tucker', 3, 1, 16, 'relu6',
- None, None, 0.25, 0.75, None, False, True),
- ('invertedbottleneck', 3, 2, 16, 'relu6',
- None, 8., None, None, False, False, False), # fused_conv
- ('invertedbottleneck', 3, 1, 16, 'relu6',
- None, 4., None, None, False, True, False), # fused_conv
- ('invertedbottleneck', 3, 1, 16, 'relu6',
- None, 8., None, None, False, True, False), # fused_conv
- ('invertedbottleneck', 3, 1, 16, 'relu6',
- None, 4., None, None, False, True, True), # fused_conv
- ('invertedbottleneck', 5, 2, 40, 'relu6',
- None, 8., None, None, False, False, False), # fused_conv
- ('invertedbottleneck', 3, 1, 40, 'relu6',
- None, 4., None, None, False, True, False), # fused_conv
- ('invertedbottleneck', 3, 1, 40, 'relu6',
- None, 4., None, None, False, True, False), # fused_conv
- ('invertedbottleneck', 3, 1, 40, 'relu6',
- None, 4., None, None, False, True, True), # fused_conv
- ('invertedbottleneck', 3, 2, 72, 'relu6',
- None, 8, None, None, True, False, False),
- ('invertedbottleneck', 3, 1, 72, 'relu6',
- None, 8, None, None, True, True, False),
- ('invertedbottleneck', 3, 1, 72, 'relu6',
- None, 4., None, None, False, True, False), # fused_conv
- ('invertedbottleneck', 3, 1, 72, 'relu6',
- None, 4., None, None, False, True, False), # fused_conv
- ('invertedbottleneck', 5, 1, 96, 'relu6',
- None, 8, None, None, True, False, False),
- ('invertedbottleneck', 5, 1, 96, 'relu6',
- None, 8, None, None, True, True, False),
- ('invertedbottleneck', 3, 1, 96, 'relu6',
- None, 8, None, None, True, True, False),
- ('invertedbottleneck', 3, 1, 96, 'relu6',
- None, 8, None, None, True, True, True),
- ('invertedbottleneck', 5, 2, 120, 'relu6',
- None, 8, None, None, True, False, False),
- ('invertedbottleneck', 3, 1, 120, 'relu6',
- None, 8, None, None, True, True, False),
- ('invertedbottleneck', 5, 1, 120, 'relu6',
- None, 4, None, None, True, True, False),
- ('invertedbottleneck', 3, 1, 120, 'relu6',
- None, 8, None, None, True, True, False),
- ('invertedbottleneck', 5, 1, 384, 'relu6',
- None, 8, None, None, True, False, True),
- ]
-}
-
-MD_GPU_BLOCK_SPECS = {
- 'spec_name': 'MobileDetGPU',
- # [use_depthwise] is set to False for fused_conv
- # [se_ratio] is set to None for all inverted_bottleneck layers
- # [activation] is set to 'relu6' for all applicable layers
- 'block_spec_schema': ['block_fn', 'kernel_size', 'strides', 'filters',
- 'activation', 'se_ratio', 'expand_ratio',
- 'input_compression_ratio', 'output_compression_ratio',
- 'use_depthwise', 'use_residual', 'is_output'],
- 'block_specs': [
- # block 0
- ('convbn', 3, 2, 32, 'relu6',
- None, None, None, None, None, None, False),
- # block 1
- ('tucker', 3, 1, 16, 'relu6',
- None, None, 0.25, 0.25, None, False, True),
- # block 2
- ('invertedbottleneck', 3, 2, 32, 'relu6',
- None, 8., None, None, False, False, False), # fused_conv
- ('tucker', 3, 1, 32, 'relu6',
- None, None, 0.25, 0.25, None, True, False),
- ('tucker', 3, 1, 32, 'relu6',
- None, None, 0.25, 0.25, None, True, False),
- ('tucker', 3, 1, 32, 'relu6',
- None, None, 0.25, 0.25, None, True, True),
- # block 3
- ('invertedbottleneck', 3, 2, 64, 'relu6',
- None, 8., None, None, False, False, False), # fused_conv
- ('invertedbottleneck', 3, 1, 64, 'relu6',
- None, 8., None, None, False, True, False), # fused_conv
- ('invertedbottleneck', 3, 1, 64, 'relu6',
- None, 8., None, None, False, True, False), # fused_conv
- ('invertedbottleneck', 3, 1, 64, 'relu6',
- None, 4., None, None, False, True, True), # fused_conv
- # block 4
- ('invertedbottleneck', 3, 2, 128, 'relu6',
- None, 8., None, None, False, False, False), # fused_conv
- ('invertedbottleneck', 3, 1, 128, 'relu6',
- None, 4., None, None, False, True, False), # fused_conv
- ('invertedbottleneck', 3, 1, 128, 'relu6',
- None, 4., None, None, False, True, False), # fused_conv
- ('invertedbottleneck', 3, 1, 128, 'relu6',
- None, 4., None, None, False, True, False), # fused_conv
- # block 5
- ('invertedbottleneck', 3, 1, 128, 'relu6',
- None, 8., None, None, False, False, False), # fused_conv
- ('invertedbottleneck', 3, 1, 128, 'relu6',
- None, 8., None, None, False, True, False), # fused_conv
- ('invertedbottleneck', 3, 1, 128, 'relu6',
- None, 8., None, None, False, True, False), # fused_conv
- ('invertedbottleneck', 3, 1, 128, 'relu6',
- None, 8., None, None, False, True, True), # fused_conv
- # block 6
- ('invertedbottleneck', 3, 2, 128, 'relu6',
- None, 4., None, None, False, False, False), # fused_conv
- ('invertedbottleneck', 3, 1, 128, 'relu6',
- None, 4., None, None, False, True, False), # fused_conv
- ('invertedbottleneck', 3, 1, 128, 'relu6',
- None, 4., None, None, False, True, False), # fused_conv
- ('invertedbottleneck', 3, 1, 128, 'relu6',
- None, 4., None, None, False, True, False), # fused_conv
- # block 7
- ('invertedbottleneck', 3, 1, 384, 'relu6',
- None, 8, None, None, True, False, True),
- ]
-}
-
-SUPPORTED_SPECS_MAP = {
- 'MobileDetCPU': MD_CPU_BLOCK_SPECS,
- 'MobileDetDSP': MD_DSP_BLOCK_SPECS,
- 'MobileDetEdgeTPU': MD_EdgeTPU_BLOCK_SPECS,
- 'MobileDetGPU': MD_GPU_BLOCK_SPECS,
-}
-
-
-@dataclasses.dataclass
-class BlockSpec(hyperparams.Config):
- """A container class that specifies the block configuration for MobileDet."""
-
- block_fn: str = 'convbn'
- kernel_size: int = 3
- strides: int = 1
- filters: int = 32
- use_bias: bool = False
- use_normalization: bool = True
- activation: str = 'relu6'
- is_output: bool = True
- # Used for block type InvertedResConv and TuckerConvBlock.
- use_residual: bool = True
- # Used for block type InvertedResConv only.
- use_depthwise: bool = True
- expand_ratio: Optional[float] = 8.
- se_ratio: Optional[float] = None
- # Used for block type TuckerConvBlock only.
- input_compression_ratio: Optional[float] = None
- output_compression_ratio: Optional[float] = None
-
-
-def block_spec_decoder(
- specs: Dict[Any, Any],
- filter_size_scale: float,
- divisible_by: int = 8) -> List[BlockSpec]:
- """Decodes specs for a block.
-
- Args:
- specs: A `dict` specification of block specs of a mobiledet version.
- filter_size_scale: A `float` multiplier for the filter size for all
- convolution ops. The value must be greater than zero. Typical usage will
- be to set this value in (0, 1) to reduce the number of parameters or
- computation cost of the model.
- divisible_by: An `int` that ensures all inner dimensions are divisible by
- this number.
-
- Returns:
- A list of `BlockSpec` that defines structure of the base network.
- """
-
- spec_name = specs['spec_name']
- block_spec_schema = specs['block_spec_schema']
- block_specs = specs['block_specs']
-
- if not block_specs:
- raise ValueError(
- 'The block spec cannot be empty for {} !'.format(spec_name))
-
- if len(block_specs[0]) != len(block_spec_schema):
- raise ValueError('The block spec values {} do not match with '
- 'the schema {}'.format(block_specs[0], block_spec_schema))
-
- decoded_specs = []
-
- for s in block_specs:
- kw_s = dict(zip(block_spec_schema, s))
- decoded_specs.append(BlockSpec(**kw_s))
-
- for ds in decoded_specs:
- if ds.filters:
- ds.filters = nn_layers.round_filters(filters=ds.filters,
- multiplier=filter_size_scale,
- divisor=divisible_by,
- round_down_protect=False,
- min_depth=8)
-
- return decoded_specs
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class MobileDet(tf.keras.Model):
- """Creates a MobileDet family model."""
-
- def __init__(
- self,
- model_id: str = 'MobileDetCPU',
- filter_size_scale: float = 1.0,
- input_specs: tf.keras.layers.InputSpec = layers.InputSpec(
- shape=[None, None, None, 3]),
- # The followings are for hyper-parameter tuning.
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- kernel_initializer: str = 'VarianceScaling',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- # The followings should be kept the same most of the times.
- min_depth: int = 8,
- divisible_by: int = 8,
- regularize_depthwise: bool = False,
- use_sync_bn: bool = False,
- **kwargs):
- """Initializes a MobileDet model.
-
- Args:
- model_id: A `str` of MobileDet version. The supported values are
- `MobileDetCPU`, `MobileDetDSP`, `MobileDetEdgeTPU`, `MobileDetGPU`.
- filter_size_scale: A `float` of multiplier for the filters (number of
- channels) for all convolution ops. The value must be greater than zero.
- Typical usage will be to set this value in (0, 1) to reduce the number
- of parameters or computation cost of the model.
- input_specs: A `tf.keras.layers.InputSpec` of specs of the input tensor.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- kernel_initializer: A `str` for kernel initializer of convolutional
- layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default to None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2D.
- Default to None.
- min_depth: An `int` of minimum depth (number of channels) for all
- convolution ops. Enforced when filter_size_scale < 1, and not an active
- constraint when filter_size_scale >= 1.
- divisible_by: An `int` that ensures all inner dimensions are divisible by
- this number.
- regularize_depthwise: If Ture, apply regularization on depthwise.
- use_sync_bn: If True, use synchronized batch normalization.
- **kwargs: Additional keyword arguments to be passed.
- """
- if model_id not in SUPPORTED_SPECS_MAP:
- raise ValueError('The MobileDet version {} '
- 'is not supported'.format(model_id))
-
- if filter_size_scale <= 0:
- raise ValueError('filter_size_scale is not greater than zero.')
-
- self._model_id = model_id
- self._input_specs = input_specs
- self._filter_size_scale = filter_size_scale
- self._min_depth = min_depth
- self._divisible_by = divisible_by
- self._regularize_depthwise = regularize_depthwise
- self._kernel_initializer = kernel_initializer
- self._kernel_regularizer = kernel_regularizer
- self._bias_regularizer = bias_regularizer
- self._use_sync_bn = use_sync_bn
- self._norm_momentum = norm_momentum
- self._norm_epsilon = norm_epsilon
-
- inputs = tf.keras.Input(shape=input_specs.shape[1:])
-
- block_specs = SUPPORTED_SPECS_MAP.get(model_id)
- self._decoded_specs = block_spec_decoder(
- specs=block_specs,
- filter_size_scale=self._filter_size_scale,
- divisible_by=self._get_divisible_by())
-
- x, endpoints, next_endpoint_level = self._mobiledet_base(inputs=inputs)
-
- self._output_specs = {l: endpoints[l].get_shape() for l in endpoints}
-
- super(MobileDet, self).__init__(
- inputs=inputs, outputs=endpoints, **kwargs)
-
- def _get_divisible_by(self):
- return self._divisible_by
-
- def _mobiledet_base(self,
- inputs: tf.Tensor
- ) -> Tuple[tf.Tensor, Dict[str, tf.Tensor], int]:
- """Builds the base MobileDet architecture.
-
- Args:
- inputs: A `tf.Tensor` of shape `[batch_size, height, width, channels]`.
-
- Returns:
- A tuple of output Tensor and dictionary that collects endpoints.
- """
-
- input_shape = inputs.get_shape().as_list()
- if len(input_shape) != 4:
- raise ValueError('Expected rank 4 input, was: %d' % len(input_shape))
-
- net = inputs
- endpoints = {}
- endpoint_level = 1
- for i, block_def in enumerate(self._decoded_specs):
- block_name = 'block_group_{}_{}'.format(block_def.block_fn, i)
-
- if block_def.block_fn == 'convbn':
-
- net = mobilenet.Conv2DBNBlock(
- filters=block_def.filters,
- kernel_size=block_def.kernel_size,
- strides=block_def.strides,
- activation=block_def.activation,
- use_bias=block_def.use_bias,
- use_normalization=block_def.use_normalization,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer,
- use_sync_bn=self._use_sync_bn,
- norm_momentum=self._norm_momentum,
- norm_epsilon=self._norm_epsilon
- )(net)
-
- elif block_def.block_fn == 'invertedbottleneck':
-
- in_filters = net.shape.as_list()[-1]
- net = nn_blocks.InvertedBottleneckBlock(
- in_filters=in_filters,
- out_filters=block_def.filters,
- kernel_size=block_def.kernel_size,
- strides=block_def.strides,
- expand_ratio=block_def.expand_ratio,
- se_ratio=block_def.se_ratio,
- se_inner_activation=block_def.activation,
- se_gating_activation='sigmoid',
- se_round_down_protect=False,
- expand_se_in_filters=True,
- activation=block_def.activation,
- use_depthwise=block_def.use_depthwise,
- use_residual=block_def.use_residual,
- regularize_depthwise=self._regularize_depthwise,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer,
- use_sync_bn=self._use_sync_bn,
- norm_momentum=self._norm_momentum,
- norm_epsilon=self._norm_epsilon,
- divisible_by=self._get_divisible_by()
- )(net)
-
- elif block_def.block_fn == 'tucker':
-
- in_filters = net.shape.as_list()[-1]
- net = nn_blocks.TuckerConvBlock(
- in_filters=in_filters,
- out_filters=block_def.filters,
- kernel_size=block_def.kernel_size,
- strides=block_def.strides,
- input_compression_ratio=block_def.input_compression_ratio,
- output_compression_ratio=block_def.output_compression_ratio,
- activation=block_def.activation,
- use_residual=block_def.use_residual,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer,
- use_sync_bn=self._use_sync_bn,
- norm_momentum=self._norm_momentum,
- norm_epsilon=self._norm_epsilon,
- divisible_by=self._get_divisible_by()
- )(net)
-
- else:
- raise ValueError('Unknown block type {} for layer {}'.format(
- block_def.block_fn, i))
-
- net = tf.keras.layers.Activation('linear', name=block_name)(net)
-
- if block_def.is_output:
- endpoints[str(endpoint_level)] = net
- endpoint_level += 1
-
- return net, endpoints, endpoint_level
-
- def get_config(self):
- config_dict = {
- 'model_id': self._model_id,
- 'filter_size_scale': self._filter_size_scale,
- 'min_depth': self._min_depth,
- 'divisible_by': self._divisible_by,
- 'regularize_depthwise': self._regularize_depthwise,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- 'bias_regularizer': self._bias_regularizer,
- 'use_sync_bn': self._use_sync_bn,
- 'norm_momentum': self._norm_momentum,
- 'norm_epsilon': self._norm_epsilon,
- }
- return config_dict
-
- @classmethod
- def from_config(cls, config, custom_objects=None):
- return cls(**config)
-
- @property
- def output_specs(self):
- """A dict of {level: TensorShape} pairs for the model output."""
- return self._output_specs
-
-
-@factory.register_backbone_builder('mobiledet')
-def build_mobiledet(
- input_specs: tf.keras.layers.InputSpec,
- backbone_config: hyperparams.Config,
- norm_activation_config: hyperparams.Config,
- l2_regularizer: Optional[tf.keras.regularizers.Regularizer] = None
-) -> tf.keras.Model:
- """Builds MobileDet backbone from a config."""
- backbone_type = backbone_config.type
- backbone_cfg = backbone_config.get()
- assert backbone_type == 'mobiledet', (f'Inconsistent backbone type '
- f'{backbone_type}')
-
- return MobileDet(
- model_id=backbone_cfg.model_id,
- filter_size_scale=backbone_cfg.filter_size_scale,
- input_specs=input_specs,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon,
- kernel_regularizer=l2_regularizer)
diff --git a/official/vision/beta/modeling/backbones/mobiledet_test.py b/official/vision/beta/modeling/backbones/mobiledet_test.py
deleted file mode 100644
index 9624b321915f09f0638af91ea1f161e8d3b8ebc8..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/mobiledet_test.py
+++ /dev/null
@@ -1,114 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for Mobiledet."""
-
-import itertools
-
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.vision.beta.modeling.backbones import mobiledet
-
-
-class MobileDetTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- 'MobileDetCPU',
- 'MobileDetDSP',
- 'MobileDetEdgeTPU',
- 'MobileDetGPU',
- )
- def test_serialize_deserialize(self, model_id):
- # Create a network object that sets all of its config options.
- kwargs = dict(
- model_id=model_id,
- filter_size_scale=1.0,
- use_sync_bn=False,
- kernel_initializer='VarianceScaling',
- kernel_regularizer=None,
- bias_regularizer=None,
- norm_momentum=0.99,
- norm_epsilon=0.001,
- min_depth=8,
- divisible_by=8,
- regularize_depthwise=False,
- )
- network = mobiledet.MobileDet(**kwargs)
-
- expected_config = dict(kwargs)
- self.assertEqual(network.get_config(), expected_config)
-
- # Create another network object from the first object's config.
- new_network = mobiledet.MobileDet.from_config(network.get_config())
-
- # Validate that the config can be forced to JSON.
- _ = new_network.to_json()
-
- # If the serialization was successful, the new config should match the old.
- self.assertAllEqual(network.get_config(), new_network.get_config())
-
- @parameterized.parameters(
- itertools.product(
- [1, 3],
- [
- 'MobileDetCPU',
- 'MobileDetDSP',
- 'MobileDetEdgeTPU',
- 'MobileDetGPU',
- ],
- ))
- def test_input_specs(self, input_dim, model_id):
- """Test different input feature dimensions."""
- tf.keras.backend.set_image_data_format('channels_last')
-
- input_specs = tf.keras.layers.InputSpec(shape=[None, None, None, input_dim])
- network = mobiledet.MobileDet(model_id=model_id, input_specs=input_specs)
-
- inputs = tf.keras.Input(shape=(128, 128, input_dim), batch_size=1)
- _ = network(inputs)
-
- @parameterized.parameters(
- itertools.product(
- [
- 'MobileDetCPU',
- 'MobileDetDSP',
- 'MobileDetEdgeTPU',
- 'MobileDetGPU',
- ],
- [32, 224],
- ))
- def test_mobiledet_creation(self, model_id, input_size):
- """Test creation of MobileDet family models."""
- tf.keras.backend.set_image_data_format('channels_last')
-
- mobiledet_layers = {
- # The number of filters of layers having outputs been collected
- # for filter_size_scale = 1.0
- 'MobileDetCPU': [8, 16, 32, 72, 144],
- 'MobileDetDSP': [24, 32, 64, 144, 240],
- 'MobileDetEdgeTPU': [16, 16, 40, 96, 384],
- 'MobileDetGPU': [16, 32, 64, 128, 384],
- }
-
- network = mobiledet.MobileDet(model_id=model_id,
- filter_size_scale=1.0)
-
- inputs = tf.keras.Input(shape=(input_size, input_size, 3), batch_size=1)
- endpoints = network(inputs)
-
- for idx, num_filter in enumerate(mobiledet_layers[model_id]):
- self.assertAllEqual(
- [1, input_size / 2 ** (idx+1), input_size / 2 ** (idx+1), num_filter],
- endpoints[str(idx+1)].shape.as_list())
diff --git a/official/vision/beta/modeling/backbones/mobilenet.py b/official/vision/beta/modeling/backbones/mobilenet.py
deleted file mode 100644
index 8249720aad95a2ccc204903d2a5b3ce200dfef67..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/mobilenet.py
+++ /dev/null
@@ -1,936 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains definitions of MobileNet Networks."""
-
-import dataclasses
-from typing import Optional, Dict, Any, Tuple
-
-# Import libraries
-import tensorflow as tf
-from official.modeling import hyperparams
-from official.modeling import tf_utils
-from official.vision.beta.modeling.backbones import factory
-from official.vision.beta.modeling.layers import nn_blocks
-from official.vision.beta.modeling.layers import nn_layers
-
-layers = tf.keras.layers
-
-
-# pylint: disable=pointless-string-statement
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class Conv2DBNBlock(tf.keras.layers.Layer):
- """A convolution block with batch normalization."""
-
- def __init__(
- self,
- filters: int,
- kernel_size: int = 3,
- strides: int = 1,
- use_bias: bool = False,
- use_explicit_padding: bool = False,
- activation: str = 'relu6',
- kernel_initializer: str = 'VarianceScaling',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- use_normalization: bool = True,
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- **kwargs):
- """A convolution block with batch normalization.
-
- Args:
- filters: An `int` number of filters for the first two convolutions. Note
- that the third and final convolution will use 4 times as many filters.
- kernel_size: An `int` specifying the height and width of the 2D
- convolution window.
- strides: An `int` of block stride. If greater than 1, this block will
- ultimately downsample the input.
- use_bias: If True, use bias in the convolution layer.
- use_explicit_padding: Use 'VALID' padding for convolutions, but prepad
- inputs so that the output dimensions are the same as if 'SAME' padding
- were used.
- activation: A `str` name of the activation function.
- kernel_initializer: A `str` for kernel initializer of convolutional
- layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default to None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2D.
- Default to None.
- use_normalization: If True, use batch normalization.
- use_sync_bn: If True, use synchronized batch normalization.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- **kwargs: Additional keyword arguments to be passed.
- """
- super(Conv2DBNBlock, self).__init__(**kwargs)
- self._filters = filters
- self._kernel_size = kernel_size
- self._strides = strides
- self._activation = activation
- self._use_bias = use_bias
- self._use_explicit_padding = use_explicit_padding
- self._kernel_initializer = kernel_initializer
- self._kernel_regularizer = kernel_regularizer
- self._bias_regularizer = bias_regularizer
- self._use_normalization = use_normalization
- self._use_sync_bn = use_sync_bn
- self._norm_momentum = norm_momentum
- self._norm_epsilon = norm_epsilon
-
- if use_explicit_padding and kernel_size > 1:
- self._padding = 'valid'
- else:
- self._padding = 'same'
- if use_sync_bn:
- self._norm = tf.keras.layers.experimental.SyncBatchNormalization
- else:
- self._norm = tf.keras.layers.BatchNormalization
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._bn_axis = -1
- else:
- self._bn_axis = 1
-
- def get_config(self):
- config = {
- 'filters': self._filters,
- 'strides': self._strides,
- 'kernel_size': self._kernel_size,
- 'use_bias': self._use_bias,
- 'use_explicit_padding': self._use_explicit_padding,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- 'bias_regularizer': self._bias_regularizer,
- 'activation': self._activation,
- 'use_sync_bn': self._use_sync_bn,
- 'use_normalization': self._use_normalization,
- 'norm_momentum': self._norm_momentum,
- 'norm_epsilon': self._norm_epsilon
- }
- base_config = super(Conv2DBNBlock, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
- def build(self, input_shape):
- if self._use_explicit_padding and self._kernel_size > 1:
- padding_size = nn_layers.get_padding_for_kernel_size(self._kernel_size)
- self._pad = tf.keras.layers.ZeroPadding2D(padding_size)
- self._conv0 = tf.keras.layers.Conv2D(
- filters=self._filters,
- kernel_size=self._kernel_size,
- strides=self._strides,
- padding=self._padding,
- use_bias=self._use_bias,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- if self._use_normalization:
- self._norm0 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)
- self._activation_layer = tf_utils.get_activation(
- self._activation, use_keras_layer=True)
-
- super(Conv2DBNBlock, self).build(input_shape)
-
- def call(self, inputs, training=None):
- if self._use_explicit_padding and self._kernel_size > 1:
- inputs = self._pad(inputs)
- x = self._conv0(inputs)
- if self._use_normalization:
- x = self._norm0(x)
- return self._activation_layer(x)
-
-"""
-Architecture: https://arxiv.org/abs/1704.04861.
-
-"MobileNets: Efficient Convolutional Neural Networks for Mobile Vision
-Applications" Andrew G. Howard, Menglong Zhu, Bo Chen, Dmitry Kalenichenko,
-Weijun Wang, Tobias Weyand, Marco Andreetto, Hartwig Adam
-"""
-MNV1_BLOCK_SPECS = {
- 'spec_name': 'MobileNetV1',
- 'block_spec_schema': ['block_fn', 'kernel_size', 'strides',
- 'filters', 'is_output'],
- 'block_specs': [
- ('convbn', 3, 2, 32, False),
- ('depsepconv', 3, 1, 64, False),
- ('depsepconv', 3, 2, 128, False),
- ('depsepconv', 3, 1, 128, True),
- ('depsepconv', 3, 2, 256, False),
- ('depsepconv', 3, 1, 256, True),
- ('depsepconv', 3, 2, 512, False),
- ('depsepconv', 3, 1, 512, False),
- ('depsepconv', 3, 1, 512, False),
- ('depsepconv', 3, 1, 512, False),
- ('depsepconv', 3, 1, 512, False),
- ('depsepconv', 3, 1, 512, True),
- ('depsepconv', 3, 2, 1024, False),
- ('depsepconv', 3, 1, 1024, True),
- ]
-}
-
-"""
-Architecture: https://arxiv.org/abs/1801.04381
-
-"MobileNetV2: Inverted Residuals and Linear Bottlenecks"
-Mark Sandler, Andrew Howard, Menglong Zhu, Andrey Zhmoginov, Liang-Chieh Chen
-"""
-MNV2_BLOCK_SPECS = {
- 'spec_name': 'MobileNetV2',
- 'block_spec_schema': ['block_fn', 'kernel_size', 'strides', 'filters',
- 'expand_ratio', 'is_output'],
- 'block_specs': [
- ('convbn', 3, 2, 32, None, False),
- ('invertedbottleneck', 3, 1, 16, 1., False),
- ('invertedbottleneck', 3, 2, 24, 6., False),
- ('invertedbottleneck', 3, 1, 24, 6., True),
- ('invertedbottleneck', 3, 2, 32, 6., False),
- ('invertedbottleneck', 3, 1, 32, 6., False),
- ('invertedbottleneck', 3, 1, 32, 6., True),
- ('invertedbottleneck', 3, 2, 64, 6., False),
- ('invertedbottleneck', 3, 1, 64, 6., False),
- ('invertedbottleneck', 3, 1, 64, 6., False),
- ('invertedbottleneck', 3, 1, 64, 6., False),
- ('invertedbottleneck', 3, 1, 96, 6., False),
- ('invertedbottleneck', 3, 1, 96, 6., False),
- ('invertedbottleneck', 3, 1, 96, 6., True),
- ('invertedbottleneck', 3, 2, 160, 6., False),
- ('invertedbottleneck', 3, 1, 160, 6., False),
- ('invertedbottleneck', 3, 1, 160, 6., False),
- ('invertedbottleneck', 3, 1, 320, 6., True),
- ('convbn', 1, 1, 1280, None, False),
- ]
-}
-
-"""
-Architecture: https://arxiv.org/abs/1905.02244
-
-"Searching for MobileNetV3"
-Andrew Howard, Mark Sandler, Grace Chu, Liang-Chieh Chen, Bo Chen, Mingxing Tan,
-Weijun Wang, Yukun Zhu, Ruoming Pang, Vijay Vasudevan, Quoc V. Le, Hartwig Adam
-"""
-MNV3Large_BLOCK_SPECS = {
- 'spec_name': 'MobileNetV3Large',
- 'block_spec_schema': ['block_fn', 'kernel_size', 'strides', 'filters',
- 'activation', 'se_ratio', 'expand_ratio',
- 'use_normalization', 'use_bias', 'is_output'],
- 'block_specs': [
- ('convbn', 3, 2, 16,
- 'hard_swish', None, None, True, False, False),
- ('invertedbottleneck', 3, 1, 16,
- 'relu', None, 1., None, False, False),
- ('invertedbottleneck', 3, 2, 24,
- 'relu', None, 4., None, False, False),
- ('invertedbottleneck', 3, 1, 24,
- 'relu', None, 3., None, False, True),
- ('invertedbottleneck', 5, 2, 40,
- 'relu', 0.25, 3., None, False, False),
- ('invertedbottleneck', 5, 1, 40,
- 'relu', 0.25, 3., None, False, False),
- ('invertedbottleneck', 5, 1, 40,
- 'relu', 0.25, 3., None, False, True),
- ('invertedbottleneck', 3, 2, 80,
- 'hard_swish', None, 6., None, False, False),
- ('invertedbottleneck', 3, 1, 80,
- 'hard_swish', None, 2.5, None, False, False),
- ('invertedbottleneck', 3, 1, 80,
- 'hard_swish', None, 2.3, None, False, False),
- ('invertedbottleneck', 3, 1, 80,
- 'hard_swish', None, 2.3, None, False, False),
- ('invertedbottleneck', 3, 1, 112,
- 'hard_swish', 0.25, 6., None, False, False),
- ('invertedbottleneck', 3, 1, 112,
- 'hard_swish', 0.25, 6., None, False, True),
- ('invertedbottleneck', 5, 2, 160,
- 'hard_swish', 0.25, 6., None, False, False),
- ('invertedbottleneck', 5, 1, 160,
- 'hard_swish', 0.25, 6., None, False, False),
- ('invertedbottleneck', 5, 1, 160,
- 'hard_swish', 0.25, 6., None, False, True),
- ('convbn', 1, 1, 960,
- 'hard_swish', None, None, True, False, False),
- ('gpooling', None, None, None,
- None, None, None, None, None, False),
- ('convbn', 1, 1, 1280,
- 'hard_swish', None, None, False, True, False),
- ]
-}
-
-MNV3Small_BLOCK_SPECS = {
- 'spec_name': 'MobileNetV3Small',
- 'block_spec_schema': ['block_fn', 'kernel_size', 'strides', 'filters',
- 'activation', 'se_ratio', 'expand_ratio',
- 'use_normalization', 'use_bias', 'is_output'],
- 'block_specs': [
- ('convbn', 3, 2, 16,
- 'hard_swish', None, None, True, False, False),
- ('invertedbottleneck', 3, 2, 16,
- 'relu', 0.25, 1, None, False, True),
- ('invertedbottleneck', 3, 2, 24,
- 'relu', None, 72. / 16, None, False, False),
- ('invertedbottleneck', 3, 1, 24,
- 'relu', None, 88. / 24, None, False, True),
- ('invertedbottleneck', 5, 2, 40,
- 'hard_swish', 0.25, 4., None, False, False),
- ('invertedbottleneck', 5, 1, 40,
- 'hard_swish', 0.25, 6., None, False, False),
- ('invertedbottleneck', 5, 1, 40,
- 'hard_swish', 0.25, 6., None, False, False),
- ('invertedbottleneck', 5, 1, 48,
- 'hard_swish', 0.25, 3., None, False, False),
- ('invertedbottleneck', 5, 1, 48,
- 'hard_swish', 0.25, 3., None, False, True),
- ('invertedbottleneck', 5, 2, 96,
- 'hard_swish', 0.25, 6., None, False, False),
- ('invertedbottleneck', 5, 1, 96,
- 'hard_swish', 0.25, 6., None, False, False),
- ('invertedbottleneck', 5, 1, 96,
- 'hard_swish', 0.25, 6., None, False, True),
- ('convbn', 1, 1, 576,
- 'hard_swish', None, None, True, False, False),
- ('gpooling', None, None, None,
- None, None, None, None, None, False),
- ('convbn', 1, 1, 1024,
- 'hard_swish', None, None, False, True, False),
- ]
-}
-
-"""
-The EdgeTPU version is taken from
-github.com/tensorflow/models/blob/master/research/slim/nets/mobilenet/mobilenet_v3.py
-"""
-MNV3EdgeTPU_BLOCK_SPECS = {
- 'spec_name': 'MobileNetV3EdgeTPU',
- 'block_spec_schema': ['block_fn', 'kernel_size', 'strides', 'filters',
- 'activation', 'se_ratio', 'expand_ratio',
- 'use_residual', 'use_depthwise', 'is_output'],
- 'block_specs': [
- ('convbn', 3, 2, 32, 'relu', None, None, None, None, False),
- ('invertedbottleneck', 3, 1, 16, 'relu', None, 1., True, False, False),
- ('invertedbottleneck', 3, 2, 32, 'relu', None, 8., True, False, False),
- ('invertedbottleneck', 3, 1, 32, 'relu', None, 4., True, False, False),
- ('invertedbottleneck', 3, 1, 32, 'relu', None, 4., True, False, False),
- ('invertedbottleneck', 3, 1, 32, 'relu', None, 4., True, False, True),
- ('invertedbottleneck', 3, 2, 48, 'relu', None, 8., True, False, False),
- ('invertedbottleneck', 3, 1, 48, 'relu', None, 4., True, False, False),
- ('invertedbottleneck', 3, 1, 48, 'relu', None, 4., True, False, False),
- ('invertedbottleneck', 3, 1, 48, 'relu', None, 4., True, False, True),
- ('invertedbottleneck', 3, 2, 96, 'relu', None, 8., True, True, False),
- ('invertedbottleneck', 3, 1, 96, 'relu', None, 4., True, True, False),
- ('invertedbottleneck', 3, 1, 96, 'relu', None, 4., True, True, False),
- ('invertedbottleneck', 3, 1, 96, 'relu', None, 4., True, True, False),
- ('invertedbottleneck', 3, 1, 96, 'relu', None, 8., False, True, False),
- ('invertedbottleneck', 3, 1, 96, 'relu', None, 4., True, True, False),
- ('invertedbottleneck', 3, 1, 96, 'relu', None, 4., True, True, False),
- ('invertedbottleneck', 3, 1, 96, 'relu', None, 4., True, True, True),
- ('invertedbottleneck', 5, 2, 160, 'relu', None, 8., True, True, False),
- ('invertedbottleneck', 5, 1, 160, 'relu', None, 4., True, True, False),
- ('invertedbottleneck', 5, 1, 160, 'relu', None, 4., True, True, False),
- ('invertedbottleneck', 5, 1, 160, 'relu', None, 4., True, True, False),
- ('invertedbottleneck', 3, 1, 192, 'relu', None, 8., True, True, True),
- ('convbn', 1, 1, 1280, 'relu', None, None, None, None, False),
- ]
-}
-
-"""
-Architecture: https://arxiv.org/pdf/2008.08178.pdf
-
-"Discovering Multi-Hardware Mobile Models via Architecture Search"
-Grace Chu, Okan Arikan, Gabriel Bender, Weijun Wang,
-Achille Brighton, Pieter-Jan Kindermans, Hanxiao Liu,
-Berkin Akin, Suyog Gupta, and Andrew Howard
-"""
-MNMultiMAX_BLOCK_SPECS = {
- 'spec_name': 'MobileNetMultiMAX',
- 'block_spec_schema': [
- 'block_fn', 'kernel_size', 'strides', 'filters', 'activation',
- 'expand_ratio', 'use_normalization', 'use_bias', 'is_output'
- ],
- 'block_specs': [
- ('convbn', 3, 2, 32, 'relu', None, True, False, False),
- ('invertedbottleneck', 3, 2, 32, 'relu', 3., None, False, True),
- ('invertedbottleneck', 5, 2, 64, 'relu', 6., None, False, False),
- ('invertedbottleneck', 3, 1, 64, 'relu', 2., None, False, False),
- ('invertedbottleneck', 3, 1, 64, 'relu', 2., None, False, True),
- ('invertedbottleneck', 5, 2, 128, 'relu', 6., None, False, False),
- ('invertedbottleneck', 3, 1, 128, 'relu', 4., None, False, False),
- ('invertedbottleneck', 3, 1, 128, 'relu', 3., None, False, False),
- ('invertedbottleneck', 3, 1, 128, 'relu', 3., None, False, False),
- ('invertedbottleneck', 3, 1, 128, 'relu', 6., None, False, False),
- ('invertedbottleneck', 3, 1, 128, 'relu', 3., None, False, True),
- ('invertedbottleneck', 3, 2, 160, 'relu', 6., None, False, False),
- ('invertedbottleneck', 5, 1, 160, 'relu', 4., None, False, False),
- ('invertedbottleneck', 3, 1, 160, 'relu', 5., None, False, False),
- ('invertedbottleneck', 5, 1, 160, 'relu', 4., None, False, True),
- ('convbn', 1, 1, 960, 'relu', None, True, False, False),
- ('gpooling', None, None, None, None, None, None, None, False),
- # Remove bias and add batch norm for the last layer to support QAT
- # and achieve slightly better accuracy.
- ('convbn', 1, 1, 1280, 'relu', None, True, False, False),
- ]
-}
-
-MNMultiAVG_BLOCK_SPECS = {
- 'spec_name': 'MobileNetMultiAVG',
- 'block_spec_schema': [
- 'block_fn', 'kernel_size', 'strides', 'filters', 'activation',
- 'expand_ratio', 'use_normalization', 'use_bias', 'is_output'
- ],
- 'block_specs': [
- ('convbn', 3, 2, 32, 'relu', None, True, False, False),
- ('invertedbottleneck', 3, 2, 32, 'relu', 3., None, False, False),
- ('invertedbottleneck', 3, 1, 32, 'relu', 2., None, False, True),
- ('invertedbottleneck', 5, 2, 64, 'relu', 5., None, False, False),
- ('invertedbottleneck', 3, 1, 64, 'relu', 3., None, False, False),
- ('invertedbottleneck', 3, 1, 64, 'relu', 2., None, False, False),
- ('invertedbottleneck', 3, 1, 64, 'relu', 3., None, False, True),
- ('invertedbottleneck', 5, 2, 128, 'relu', 6., None, False, False),
- ('invertedbottleneck', 3, 1, 128, 'relu', 3., None, False, False),
- ('invertedbottleneck', 3, 1, 128, 'relu', 3., None, False, False),
- ('invertedbottleneck', 3, 1, 128, 'relu', 3., None, False, False),
- ('invertedbottleneck', 3, 1, 160, 'relu', 6., None, False, False),
- ('invertedbottleneck', 3, 1, 160, 'relu', 4., None, False, True),
- ('invertedbottleneck', 3, 2, 192, 'relu', 6., None, False, False),
- ('invertedbottleneck', 5, 1, 192, 'relu', 4., None, False, False),
- ('invertedbottleneck', 5, 1, 192, 'relu', 4., None, False, False),
- ('invertedbottleneck', 5, 1, 192, 'relu', 4., None, False, True),
- ('convbn', 1, 1, 960, 'relu', None, True, False, False),
- ('gpooling', None, None, None, None, None, None, None, False),
- # Remove bias and add batch norm for the last layer to support QAT
- # and achieve slightly better accuracy.
- ('convbn', 1, 1, 1280, 'relu', None, True, False, False),
- ]
-}
-
-# Similar to MobileNetMultiAVG and used for segmentation task.
-# Reduced the filters by a factor of 2 in the last block.
-MNMultiAVG_SEG_BLOCK_SPECS = {
- 'spec_name':
- 'MobileNetMultiAVGSeg',
- 'block_spec_schema': [
- 'block_fn', 'kernel_size', 'strides', 'filters', 'activation',
- 'expand_ratio', 'use_normalization', 'use_bias', 'is_output'
- ],
- 'block_specs': [
- ('convbn', 3, 2, 32, 'relu', None, True, False, False),
- ('invertedbottleneck', 3, 2, 32, 'relu', 3., True, False, False),
- ('invertedbottleneck', 3, 1, 32, 'relu', 2., True, False, True),
- ('invertedbottleneck', 5, 2, 64, 'relu', 5., True, False, False),
- ('invertedbottleneck', 3, 1, 64, 'relu', 3., True, False, False),
- ('invertedbottleneck', 3, 1, 64, 'relu', 2., True, False, False),
- ('invertedbottleneck', 3, 1, 64, 'relu', 3., True, False, True),
- ('invertedbottleneck', 5, 2, 128, 'relu', 6., True, False, False),
- ('invertedbottleneck', 3, 1, 128, 'relu', 3., True, False, False),
- ('invertedbottleneck', 3, 1, 128, 'relu', 3., True, False, False),
- ('invertedbottleneck', 3, 1, 128, 'relu', 3., True, False, False),
- ('invertedbottleneck', 3, 1, 160, 'relu', 6., True, False, False),
- ('invertedbottleneck', 3, 1, 160, 'relu', 4., True, False, True),
- ('invertedbottleneck', 3, 2, 192, 'relu', 6., True, False, False),
- ('invertedbottleneck', 5, 1, 96, 'relu', 2., True, False, False),
- ('invertedbottleneck', 5, 1, 96, 'relu', 4., True, False, False),
- ('invertedbottleneck', 5, 1, 96, 'relu', 4., True, False, True),
- ('convbn', 1, 1, 448, 'relu', None, True, False, True),
- ('gpooling', None, None, None, None, None, None, None, False),
- # Remove bias and add batch norm for the last layer to support QAT
- # and achieve slightly better accuracy.
- ('convbn', 1, 1, 1280, 'relu', None, True, False, False),
- ]
-}
-
-# Similar to MobileNetMultiMax and used for segmentation task.
-# Reduced the filters by a factor of 2 in the last block.
-MNMultiMAX_SEG_BLOCK_SPECS = {
- 'spec_name':
- 'MobileNetMultiMAXSeg',
- 'block_spec_schema': [
- 'block_fn', 'kernel_size', 'strides', 'filters', 'activation',
- 'expand_ratio', 'use_normalization', 'use_bias', 'is_output'
- ],
- 'block_specs': [
- ('convbn', 3, 2, 32, 'relu', None, True, False, False),
- ('invertedbottleneck', 3, 2, 32, 'relu', 3., True, False, True),
- ('invertedbottleneck', 5, 2, 64, 'relu', 6., True, False, False),
- ('invertedbottleneck', 3, 1, 64, 'relu', 2., True, False, False),
- ('invertedbottleneck', 3, 1, 64, 'relu', 2., True, False, True),
- ('invertedbottleneck', 5, 2, 128, 'relu', 6., True, False, False),
- ('invertedbottleneck', 3, 1, 128, 'relu', 4., True, False, False),
- ('invertedbottleneck', 3, 1, 128, 'relu', 3., True, False, False),
- ('invertedbottleneck', 3, 1, 128, 'relu', 3., True, False, False),
- ('invertedbottleneck', 3, 1, 128, 'relu', 6., True, False, False),
- ('invertedbottleneck', 3, 1, 128, 'relu', 3., True, False, True),
- ('invertedbottleneck', 3, 2, 160, 'relu', 6., True, False, False),
- ('invertedbottleneck', 5, 1, 96, 'relu', 2., True, False, False),
- ('invertedbottleneck', 3, 1, 96, 'relu', 4., True, False, False),
- ('invertedbottleneck', 5, 1, 96, 'relu', 320.0 / 96, True, False, True),
- ('convbn', 1, 1, 448, 'relu', None, True, False, True),
- ('gpooling', None, None, None, None, None, None, None, False),
- # Remove bias and add batch norm for the last layer to support QAT
- # and achieve slightly better accuracy.
- ('convbn', 1, 1, 1280, 'relu', None, True, False, False),
- ]
-}
-
-# A smaller MNV3Small, with reduced filters for the last few layers
-MNV3SmallReducedFilters = {
- 'spec_name':
- 'MobilenetV3SmallReducedFilters',
- 'block_spec_schema': [
- 'block_fn', 'kernel_size', 'strides', 'filters', 'activation',
- 'se_ratio', 'expand_ratio', 'use_normalization', 'use_bias', 'is_output'
- ],
- 'block_specs': [
- ('convbn', 3, 2, 16, 'hard_swish', None, None, True, False, False),
- ('invertedbottleneck', 3, 2, 16, 'relu', 0.25, 1, None, False, True),
- ('invertedbottleneck', 3, 2, 24, 'relu', None, 72. / 16, None, False,
- False),
- ('invertedbottleneck', 3, 1, 24, 'relu', None, 88. / 24, None, False,
- True),
- ('invertedbottleneck', 5, 2, 40, 'hard_swish', 0.25, 4, None, False,
- False),
- ('invertedbottleneck', 5, 1, 40, 'hard_swish', 0.25, 6, None, False,
- False),
- ('invertedbottleneck', 5, 1, 40, 'hard_swish', 0.25, 6, None, False,
- False),
- ('invertedbottleneck', 5, 1, 48, 'hard_swish', 0.25, 3, None, False,
- False),
- ('invertedbottleneck', 5, 1, 48, 'hard_swish', 0.25, 3, None, False,
- True),
- # Layers below are different from MobileNetV3Small and have
- # half as many filters
- ('invertedbottleneck', 5, 2, 48, 'hard_swish', 0.25, 3, None, False,
- False),
- ('invertedbottleneck', 5, 1, 48, 'hard_swish', 0.25, 6, None, False,
- False),
- ('invertedbottleneck', 5, 1, 48, 'hard_swish', 0.25, 6, None, False,
- True),
- ('convbn', 1, 1, 288, 'hard_swish', None, None, True, False, False),
- ('gpooling', None, None, None, None, None, None, None, None, False),
- ('convbn', 1, 1, 1024, 'hard_swish', None, None, False, True, False),
- ]
-}
-
-SUPPORTED_SPECS_MAP = {
- 'MobileNetV1': MNV1_BLOCK_SPECS,
- 'MobileNetV2': MNV2_BLOCK_SPECS,
- 'MobileNetV3Large': MNV3Large_BLOCK_SPECS,
- 'MobileNetV3Small': MNV3Small_BLOCK_SPECS,
- 'MobileNetV3EdgeTPU': MNV3EdgeTPU_BLOCK_SPECS,
- 'MobileNetMultiMAX': MNMultiMAX_BLOCK_SPECS,
- 'MobileNetMultiAVG': MNMultiAVG_BLOCK_SPECS,
- 'MobileNetMultiAVGSeg': MNMultiAVG_SEG_BLOCK_SPECS,
- 'MobileNetMultiMAXSeg': MNMultiMAX_SEG_BLOCK_SPECS,
- 'MobileNetV3SmallReducedFilters': MNV3SmallReducedFilters,
-}
-
-
-@dataclasses.dataclass
-class BlockSpec(hyperparams.Config):
- """A container class that specifies the block configuration for MobileNet."""
-
- block_fn: str = 'convbn'
- kernel_size: int = 3
- strides: int = 1
- filters: int = 32
- use_bias: bool = False
- use_normalization: bool = True
- activation: str = 'relu6'
- # Used for block type InvertedResConv.
- expand_ratio: Optional[float] = 6.
- # Used for block type InvertedResConv with SE.
- se_ratio: Optional[float] = None
- use_depthwise: bool = True
- use_residual: bool = True
- is_output: bool = True
-
-
-def block_spec_decoder(
- specs: Dict[Any, Any],
- filter_size_scale: float,
- # Set to 1 for mobilenetv1.
- divisible_by: int = 8,
- finegrain_classification_mode: bool = True):
- """Decodes specs for a block.
-
- Args:
- specs: A `dict` specification of block specs of a mobilenet version.
- filter_size_scale: A `float` multiplier for the filter size for all
- convolution ops. The value must be greater than zero. Typical usage will
- be to set this value in (0, 1) to reduce the number of parameters or
- computation cost of the model.
- divisible_by: An `int` that ensures all inner dimensions are divisible by
- this number.
- finegrain_classification_mode: If True, the model will keep the last layer
- large even for small multipliers, following
- https://arxiv.org/abs/1801.04381.
-
- Returns:
- A list of `BlockSpec` that defines structure of the base network.
- """
-
- spec_name = specs['spec_name']
- block_spec_schema = specs['block_spec_schema']
- block_specs = specs['block_specs']
-
- if not block_specs:
- raise ValueError(
- 'The block spec cannot be empty for {} !'.format(spec_name))
-
- if len(block_specs[0]) != len(block_spec_schema):
- raise ValueError('The block spec values {} do not match with '
- 'the schema {}'.format(block_specs[0], block_spec_schema))
-
- decoded_specs = []
-
- for s in block_specs:
- kw_s = dict(zip(block_spec_schema, s))
- decoded_specs.append(BlockSpec(**kw_s))
-
- # This adjustment applies to V2 and V3
- if (spec_name != 'MobileNetV1'
- and finegrain_classification_mode
- and filter_size_scale < 1.0):
- decoded_specs[-1].filters /= filter_size_scale # pytype: disable=annotation-type-mismatch
-
- for ds in decoded_specs:
- if ds.filters:
- ds.filters = nn_layers.round_filters(filters=ds.filters,
- multiplier=filter_size_scale,
- divisor=divisible_by,
- min_depth=8)
-
- return decoded_specs
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class MobileNet(tf.keras.Model):
- """Creates a MobileNet family model."""
-
- def __init__(
- self,
- model_id: str = 'MobileNetV2',
- filter_size_scale: float = 1.0,
- input_specs: tf.keras.layers.InputSpec = layers.InputSpec(
- shape=[None, None, None, 3]),
- # The followings are for hyper-parameter tuning.
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- kernel_initializer: str = 'VarianceScaling',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- # The followings should be kept the same most of the times.
- output_stride: Optional[int] = None,
- min_depth: int = 8,
- # divisible is not used in MobileNetV1.
- divisible_by: int = 8,
- stochastic_depth_drop_rate: float = 0.0,
- regularize_depthwise: bool = False,
- use_sync_bn: bool = False,
- # finegrain is not used in MobileNetV1.
- finegrain_classification_mode: bool = True,
- output_intermediate_endpoints: bool = False,
- **kwargs):
- """Initializes a MobileNet model.
-
- Args:
- model_id: A `str` of MobileNet version. The supported values are
- `MobileNetV1`, `MobileNetV2`, `MobileNetV3Large`, `MobileNetV3Small`,
- `MobileNetV3EdgeTPU`, `MobileNetMultiMAX` and `MobileNetMultiAVG`.
- filter_size_scale: A `float` of multiplier for the filters (number of
- channels) for all convolution ops. The value must be greater than zero.
- Typical usage will be to set this value in (0, 1) to reduce the number
- of parameters or computation cost of the model.
- input_specs: A `tf.keras.layers.InputSpec` of specs of the input tensor.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- kernel_initializer: A `str` for kernel initializer of convolutional
- layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default to None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2D.
- Default to None.
- output_stride: An `int` that specifies the requested ratio of input to
- output spatial resolution. If not None, then we invoke atrous
- convolution if necessary to prevent the network from reducing the
- spatial resolution of activation maps. Allowed values are 8 (accurate
- fully convolutional mode), 16 (fast fully convolutional mode), 32
- (classification mode).
- min_depth: An `int` of minimum depth (number of channels) for all
- convolution ops. Enforced when filter_size_scale < 1, and not an active
- constraint when filter_size_scale >= 1.
- divisible_by: An `int` that ensures all inner dimensions are divisible by
- this number.
- stochastic_depth_drop_rate: A `float` of drop rate for drop connect layer.
- regularize_depthwise: If Ture, apply regularization on depthwise.
- use_sync_bn: If True, use synchronized batch normalization.
- finegrain_classification_mode: If True, the model will keep the last layer
- large even for small multipliers, following
- https://arxiv.org/abs/1801.04381.
- output_intermediate_endpoints: A `bool` of whether or not output the
- intermediate endpoints.
- **kwargs: Additional keyword arguments to be passed.
- """
- if model_id not in SUPPORTED_SPECS_MAP:
- raise ValueError('The MobileNet version {} '
- 'is not supported'.format(model_id))
-
- if filter_size_scale <= 0:
- raise ValueError('filter_size_scale is not greater than zero.')
-
- if output_stride is not None:
- if model_id == 'MobileNetV1':
- if output_stride not in [8, 16, 32]:
- raise ValueError('Only allowed output_stride values are 8, 16, 32.')
- else:
- if output_stride == 0 or (output_stride > 1 and output_stride % 2):
- raise ValueError('Output stride must be None, 1 or a multiple of 2.')
-
- self._model_id = model_id
- self._input_specs = input_specs
- self._filter_size_scale = filter_size_scale
- self._min_depth = min_depth
- self._output_stride = output_stride
- self._divisible_by = divisible_by
- self._stochastic_depth_drop_rate = stochastic_depth_drop_rate
- self._regularize_depthwise = regularize_depthwise
- self._kernel_initializer = kernel_initializer
- self._kernel_regularizer = kernel_regularizer
- self._bias_regularizer = bias_regularizer
- self._use_sync_bn = use_sync_bn
- self._norm_momentum = norm_momentum
- self._norm_epsilon = norm_epsilon
- self._finegrain_classification_mode = finegrain_classification_mode
- self._output_intermediate_endpoints = output_intermediate_endpoints
-
- inputs = tf.keras.Input(shape=input_specs.shape[1:])
-
- block_specs = SUPPORTED_SPECS_MAP.get(model_id)
- self._decoded_specs = block_spec_decoder(
- specs=block_specs,
- filter_size_scale=self._filter_size_scale,
- divisible_by=self._get_divisible_by(),
- finegrain_classification_mode=self._finegrain_classification_mode)
-
- x, endpoints, next_endpoint_level = self._mobilenet_base(inputs=inputs)
-
- self._output_specs = {l: endpoints[l].get_shape() for l in endpoints}
- # Don't include the final layer in `self._output_specs` to support decoders.
- endpoints[str(next_endpoint_level)] = x
-
- super(MobileNet, self).__init__(
- inputs=inputs, outputs=endpoints, **kwargs)
-
- def _get_divisible_by(self):
- if self._model_id == 'MobileNetV1':
- return 1
- else:
- return self._divisible_by
-
- def _mobilenet_base(self,
- inputs: tf.Tensor
- ) -> Tuple[tf.Tensor, Dict[str, tf.Tensor], int]:
- """Builds the base MobileNet architecture.
-
- Args:
- inputs: A `tf.Tensor` of shape `[batch_size, height, width, channels]`.
-
- Returns:
- A tuple of output Tensor and dictionary that collects endpoints.
- """
-
- input_shape = inputs.get_shape().as_list()
- if len(input_shape) != 4:
- raise ValueError('Expected rank 4 input, was: %d' % len(input_shape))
-
- # The current_stride variable keeps track of the output stride of the
- # activations, i.e., the running product of convolution strides up to the
- # current network layer. This allows us to invoke atrous convolution
- # whenever applying the next convolution would result in the activations
- # having output stride larger than the target output_stride.
- current_stride = 1
-
- # The atrous convolution rate parameter.
- rate = 1
-
- net = inputs
- endpoints = {}
- endpoint_level = 2
- for i, block_def in enumerate(self._decoded_specs):
- block_name = 'block_group_{}_{}'.format(block_def.block_fn, i)
- # A small catch for gpooling block with None strides
- if not block_def.strides:
- block_def.strides = 1
- if (self._output_stride is not None and
- current_stride == self._output_stride):
- # If we have reached the target output_stride, then we need to employ
- # atrous convolution with stride=1 and multiply the atrous rate by the
- # current unit's stride for use in subsequent layers.
- layer_stride = 1
- layer_rate = rate
- rate *= block_def.strides
- else:
- layer_stride = block_def.strides
- layer_rate = 1
- current_stride *= block_def.strides
-
- intermediate_endpoints = {}
- if block_def.block_fn == 'convbn':
-
- net = Conv2DBNBlock(
- filters=block_def.filters,
- kernel_size=block_def.kernel_size,
- strides=block_def.strides,
- activation=block_def.activation,
- use_bias=block_def.use_bias,
- use_normalization=block_def.use_normalization,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer,
- use_sync_bn=self._use_sync_bn,
- norm_momentum=self._norm_momentum,
- norm_epsilon=self._norm_epsilon
- )(net)
-
- elif block_def.block_fn == 'depsepconv':
- net = nn_blocks.DepthwiseSeparableConvBlock(
- filters=block_def.filters,
- kernel_size=block_def.kernel_size,
- strides=layer_stride,
- activation=block_def.activation,
- dilation_rate=layer_rate,
- regularize_depthwise=self._regularize_depthwise,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- use_sync_bn=self._use_sync_bn,
- norm_momentum=self._norm_momentum,
- norm_epsilon=self._norm_epsilon,
- )(net)
-
- elif block_def.block_fn == 'invertedbottleneck':
- use_rate = rate
- if layer_rate > 1 and block_def.kernel_size != 1:
- # We will apply atrous rate in the following cases:
- # 1) When kernel_size is not in params, the operation then uses
- # default kernel size 3x3.
- # 2) When kernel_size is in params, and if the kernel_size is not
- # equal to (1, 1) (there is no need to apply atrous convolution to
- # any 1x1 convolution).
- use_rate = layer_rate
- in_filters = net.shape.as_list()[-1]
- block = nn_blocks.InvertedBottleneckBlock(
- in_filters=in_filters,
- out_filters=block_def.filters,
- kernel_size=block_def.kernel_size,
- strides=layer_stride,
- expand_ratio=block_def.expand_ratio,
- se_ratio=block_def.se_ratio,
- expand_se_in_filters=True,
- se_gating_activation='hard_sigmoid',
- activation=block_def.activation,
- use_depthwise=block_def.use_depthwise,
- use_residual=block_def.use_residual,
- dilation_rate=use_rate,
- regularize_depthwise=self._regularize_depthwise,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer,
- use_sync_bn=self._use_sync_bn,
- norm_momentum=self._norm_momentum,
- norm_epsilon=self._norm_epsilon,
- stochastic_depth_drop_rate=self._stochastic_depth_drop_rate,
- divisible_by=self._get_divisible_by(),
- output_intermediate_endpoints=self._output_intermediate_endpoints,
- )
- if self._output_intermediate_endpoints:
- net, intermediate_endpoints = block(net)
- else:
- net = block(net)
-
- elif block_def.block_fn == 'gpooling':
- net = layers.GlobalAveragePooling2D()(net)
- net = layers.Reshape((1, 1, net.shape[1]))(net)
-
- else:
- raise ValueError('Unknown block type {} for layer {}'.format(
- block_def.block_fn, i))
-
- net = tf.keras.layers.Activation('linear', name=block_name)(net)
-
- if block_def.is_output:
- endpoints[str(endpoint_level)] = net
- for key, tensor in intermediate_endpoints.items():
- endpoints[str(endpoint_level) + '/' + key] = tensor
- if current_stride != self._output_stride:
- endpoint_level += 1
-
- if str(endpoint_level) in endpoints:
- endpoint_level += 1
- return net, endpoints, endpoint_level
-
- def get_config(self):
- config_dict = {
- 'model_id': self._model_id,
- 'filter_size_scale': self._filter_size_scale,
- 'min_depth': self._min_depth,
- 'output_stride': self._output_stride,
- 'divisible_by': self._divisible_by,
- 'stochastic_depth_drop_rate': self._stochastic_depth_drop_rate,
- 'regularize_depthwise': self._regularize_depthwise,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- 'bias_regularizer': self._bias_regularizer,
- 'use_sync_bn': self._use_sync_bn,
- 'norm_momentum': self._norm_momentum,
- 'norm_epsilon': self._norm_epsilon,
- 'finegrain_classification_mode': self._finegrain_classification_mode,
- }
- return config_dict
-
- @classmethod
- def from_config(cls, config, custom_objects=None):
- return cls(**config)
-
- @property
- def output_specs(self):
- """A dict of {level: TensorShape} pairs for the model output."""
- return self._output_specs
-
-
-@factory.register_backbone_builder('mobilenet')
-def build_mobilenet(
- input_specs: tf.keras.layers.InputSpec,
- backbone_config: hyperparams.Config,
- norm_activation_config: hyperparams.Config,
- l2_regularizer: Optional[tf.keras.regularizers.Regularizer] = None
-) -> tf.keras.Model:
- """Builds MobileNet backbone from a config."""
- backbone_type = backbone_config.type
- backbone_cfg = backbone_config.get()
- assert backbone_type == 'mobilenet', (f'Inconsistent backbone type '
- f'{backbone_type}')
-
- return MobileNet(
- model_id=backbone_cfg.model_id,
- filter_size_scale=backbone_cfg.filter_size_scale,
- input_specs=input_specs,
- stochastic_depth_drop_rate=backbone_cfg.stochastic_depth_drop_rate,
- output_stride=backbone_cfg.output_stride,
- output_intermediate_endpoints=backbone_cfg.output_intermediate_endpoints,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon,
- kernel_regularizer=l2_regularizer)
diff --git a/official/vision/beta/modeling/backbones/mobilenet_test.py b/official/vision/beta/modeling/backbones/mobilenet_test.py
deleted file mode 100644
index 271e2060e0b9f525a34625884553facb52b9f78e..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/mobilenet_test.py
+++ /dev/null
@@ -1,299 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for MobileNet."""
-
-import itertools
-import math
-
-# Import libraries
-
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.vision.beta.modeling.backbones import mobilenet
-
-
-class MobileNetTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- 'MobileNetV1',
- 'MobileNetV2',
- 'MobileNetV3Large',
- 'MobileNetV3Small',
- 'MobileNetV3EdgeTPU',
- 'MobileNetMultiAVG',
- 'MobileNetMultiMAX',
- 'MobileNetMultiAVGSeg',
- 'MobileNetMultiMAXSeg',
- 'MobileNetV3SmallReducedFilters',
- )
- def test_serialize_deserialize(self, model_id):
- # Create a network object that sets all of its config options.
- kwargs = dict(
- model_id=model_id,
- filter_size_scale=1.0,
- stochastic_depth_drop_rate=None,
- use_sync_bn=False,
- kernel_initializer='VarianceScaling',
- kernel_regularizer=None,
- bias_regularizer=None,
- norm_momentum=0.99,
- norm_epsilon=0.001,
- output_stride=None,
- min_depth=8,
- divisible_by=8,
- regularize_depthwise=False,
- finegrain_classification_mode=True
- )
- network = mobilenet.MobileNet(**kwargs)
-
- expected_config = dict(kwargs)
- self.assertEqual(network.get_config(), expected_config)
-
- # Create another network object from the first object's config.
- new_network = mobilenet.MobileNet.from_config(network.get_config())
-
- # Validate that the config can be forced to JSON.
- _ = new_network.to_json()
-
- # If the serialization was successful, the new config should match the old.
- self.assertAllEqual(network.get_config(), new_network.get_config())
-
- @parameterized.parameters(
- itertools.product(
- [1, 3],
- [
- 'MobileNetV1',
- 'MobileNetV2',
- 'MobileNetV3Large',
- 'MobileNetV3Small',
- 'MobileNetV3EdgeTPU',
- 'MobileNetMultiAVG',
- 'MobileNetMultiMAX',
- 'MobileNetMultiAVGSeg',
- 'MobileNetMultiMAXSeg',
- 'MobileNetV3SmallReducedFilters',
- ],
- ))
- def test_input_specs(self, input_dim, model_id):
- """Test different input feature dimensions."""
- tf.keras.backend.set_image_data_format('channels_last')
-
- input_specs = tf.keras.layers.InputSpec(shape=[None, None, None, input_dim])
- network = mobilenet.MobileNet(model_id=model_id, input_specs=input_specs)
-
- inputs = tf.keras.Input(shape=(128, 128, input_dim), batch_size=1)
- _ = network(inputs)
-
- @parameterized.parameters(
- itertools.product(
- [
- 'MobileNetV1',
- 'MobileNetV2',
- 'MobileNetV3Large',
- 'MobileNetV3Small',
- 'MobileNetV3EdgeTPU',
- 'MobileNetMultiAVG',
- 'MobileNetMultiMAX',
- 'MobileNetMultiAVGSeg',
- 'MobileNetV3SmallReducedFilters',
- ],
- [32, 224],
- ))
- def test_mobilenet_creation(self, model_id,
- input_size):
- """Test creation of MobileNet family models."""
- tf.keras.backend.set_image_data_format('channels_last')
-
- mobilenet_layers = {
- # The number of filters of layers having outputs been collected
- # for filter_size_scale = 1.0
- 'MobileNetV1': [128, 256, 512, 1024],
- 'MobileNetV2': [24, 32, 96, 320],
- 'MobileNetV3Small': [16, 24, 48, 96],
- 'MobileNetV3Large': [24, 40, 112, 160],
- 'MobileNetV3EdgeTPU': [32, 48, 96, 192],
- 'MobileNetMultiMAX': [32, 64, 128, 160],
- 'MobileNetMultiAVG': [32, 64, 160, 192],
- 'MobileNetMultiAVGSeg': [32, 64, 160, 96],
- 'MobileNetMultiMAXSeg': [32, 64, 128, 96],
- 'MobileNetV3SmallReducedFilters': [16, 24, 48, 48],
- }
-
- network = mobilenet.MobileNet(model_id=model_id,
- filter_size_scale=1.0)
-
- inputs = tf.keras.Input(shape=(input_size, input_size, 3), batch_size=1)
- endpoints = network(inputs)
-
- for idx, num_filter in enumerate(mobilenet_layers[model_id]):
- self.assertAllEqual(
- [1, input_size / 2 ** (idx+2), input_size / 2 ** (idx+2), num_filter],
- endpoints[str(idx+2)].shape.as_list())
-
- @parameterized.parameters(
- itertools.product(
- [
- 'MobileNetV1',
- 'MobileNetV2',
- 'MobileNetV3Large',
- 'MobileNetV3Small',
- 'MobileNetV3EdgeTPU',
- 'MobileNetMultiAVG',
- 'MobileNetMultiMAX',
- 'MobileNetMultiAVGSeg',
- 'MobileNetMultiMAXSeg',
- 'MobileNetV3SmallReducedFilters',
- ],
- [32, 224],
- ))
- def test_mobilenet_intermediate_layers(self, model_id, input_size):
- tf.keras.backend.set_image_data_format('channels_last')
- # Tests the mobilenet intermediate depthwise layers.
- mobilenet_depthwise_layers = {
- # The number of filters of depthwise layers having outputs been
- # collected for filter_size_scale = 1.0. Only tests the mobilenet
- # model with inverted bottleneck block using depthwise which excludes
- # MobileNetV1.
- 'MobileNetV1': [],
- 'MobileNetV2': [144, 192, 576, 960],
- 'MobileNetV3Small': [16, 88, 144, 576],
- 'MobileNetV3Large': [72, 120, 672, 960],
- 'MobileNetV3EdgeTPU': [None, None, 384, 1280],
- 'MobileNetMultiMAX': [96, 128, 384, 640],
- 'MobileNetMultiAVG': [64, 192, 640, 768],
- 'MobileNetMultiAVGSeg': [64, 192, 640, 384],
- 'MobileNetMultiMAXSeg': [96, 128, 384, 320],
- 'MobileNetV3SmallReducedFilters': [16, 88, 144, 288],
- }
- network = mobilenet.MobileNet(model_id=model_id,
- filter_size_scale=1.0,
- output_intermediate_endpoints=True)
-
- inputs = tf.keras.Input(shape=(input_size, input_size, 3), batch_size=1)
- endpoints = network(inputs)
-
- for idx, num_filter in enumerate(mobilenet_depthwise_layers[model_id]):
- # Not using depthwise conv in this layer.
- if num_filter is None:
- continue
-
- self.assertAllEqual(
- [1, input_size / 2**(idx + 2), input_size / 2**(idx + 2), num_filter],
- endpoints[str(idx + 2) + '/depthwise'].shape.as_list())
-
- @parameterized.parameters(
- itertools.product(
- [
- 'MobileNetV1',
- 'MobileNetV2',
- 'MobileNetV3Large',
- 'MobileNetV3Small',
- 'MobileNetV3EdgeTPU',
- 'MobileNetMultiAVG',
- 'MobileNetMultiMAX',
- 'MobileNetMultiMAX',
- 'MobileNetMultiAVGSeg',
- 'MobileNetMultiMAXSeg',
- 'MobileNetV3SmallReducedFilters',
- ],
- [1.0, 0.75],
- ))
- def test_mobilenet_scaling(self, model_id,
- filter_size_scale):
- """Test for creation of a MobileNet classifier."""
- mobilenet_params = {
- ('MobileNetV1', 1.0): 3228864,
- ('MobileNetV1', 0.75): 1832976,
- ('MobileNetV2', 1.0): 2257984,
- ('MobileNetV2', 0.75): 1382064,
- ('MobileNetV3Large', 1.0): 4226432,
- ('MobileNetV3Large', 0.75): 2731616,
- ('MobileNetV3Small', 1.0): 1529968,
- ('MobileNetV3Small', 0.75): 1026552,
- ('MobileNetV3EdgeTPU', 1.0): 2849312,
- ('MobileNetV3EdgeTPU', 0.75): 1737288,
- ('MobileNetMultiAVG', 1.0): 3704416,
- ('MobileNetMultiAVG', 0.75): 2349704,
- ('MobileNetMultiMAX', 1.0): 3174560,
- ('MobileNetMultiMAX', 0.75): 2045816,
- ('MobileNetMultiAVGSeg', 1.0): 2239840,
- ('MobileNetMultiAVGSeg', 0.75): 1395272,
- ('MobileNetMultiMAXSeg', 1.0): 1929088,
- ('MobileNetMultiMAXSeg', 0.75): 1216544,
- ('MobileNetV3SmallReducedFilters', 1.0): 694880,
- ('MobileNetV3SmallReducedFilters', 0.75): 505960,
- }
-
- input_size = 224
- network = mobilenet.MobileNet(model_id=model_id,
- filter_size_scale=filter_size_scale)
- self.assertEqual(network.count_params(),
- mobilenet_params[(model_id, filter_size_scale)])
-
- inputs = tf.keras.Input(shape=(input_size, input_size, 3), batch_size=1)
- _ = network(inputs)
-
- @parameterized.parameters(
- itertools.product(
- [
- 'MobileNetV1',
- 'MobileNetV2',
- 'MobileNetV3Large',
- 'MobileNetV3Small',
- 'MobileNetV3EdgeTPU',
- 'MobileNetMultiAVG',
- 'MobileNetMultiMAX',
- 'MobileNetMultiAVGSeg',
- 'MobileNetMultiMAXSeg',
- 'MobileNetV3SmallReducedFilters',
- ],
- [8, 16, 32],
- ))
- def test_mobilenet_output_stride(self, model_id, output_stride):
- """Test for creation of a MobileNet with different output strides."""
- tf.keras.backend.set_image_data_format('channels_last')
-
- mobilenet_layers = {
- # The number of filters of the layers outputs been collected
- # for filter_size_scale = 1.0.
- 'MobileNetV1': 1024,
- 'MobileNetV2': 320,
- 'MobileNetV3Small': 96,
- 'MobileNetV3Large': 160,
- 'MobileNetV3EdgeTPU': 192,
- 'MobileNetMultiMAX': 160,
- 'MobileNetMultiAVG': 192,
- 'MobileNetMultiAVGSeg': 448,
- 'MobileNetMultiMAXSeg': 448,
- 'MobileNetV3SmallReducedFilters': 48,
- }
-
- network = mobilenet.MobileNet(
- model_id=model_id, filter_size_scale=1.0, output_stride=output_stride)
- level = int(math.log2(output_stride))
- input_size = 224
-
- inputs = tf.keras.Input(shape=(input_size, input_size, 3), batch_size=1)
- endpoints = network(inputs)
- num_filter = mobilenet_layers[model_id]
- self.assertAllEqual(
- [1, input_size / output_stride, input_size / output_stride, num_filter],
- endpoints[str(level)].shape.as_list())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/backbones/resnet.py b/official/vision/beta/modeling/backbones/resnet.py
deleted file mode 100644
index a451216d5ad8c67c3d54d12ff348eba8397b6a2d..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/resnet.py
+++ /dev/null
@@ -1,432 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains definitions of ResNet and ResNet-RS models."""
-
-from typing import Callable, Optional
-
-# Import libraries
-import tensorflow as tf
-
-from official.modeling import hyperparams
-from official.modeling import tf_utils
-from official.vision.beta.modeling.backbones import factory
-from official.vision.beta.modeling.layers import nn_blocks
-from official.vision.beta.modeling.layers import nn_layers
-
-layers = tf.keras.layers
-
-# Specifications for different ResNet variants.
-# Each entry specifies block configurations of the particular ResNet variant.
-# Each element in the block configuration is in the following format:
-# (block_fn, num_filters, block_repeats)
-RESNET_SPECS = {
- 10: [
- ('residual', 64, 1),
- ('residual', 128, 1),
- ('residual', 256, 1),
- ('residual', 512, 1),
- ],
- 18: [
- ('residual', 64, 2),
- ('residual', 128, 2),
- ('residual', 256, 2),
- ('residual', 512, 2),
- ],
- 34: [
- ('residual', 64, 3),
- ('residual', 128, 4),
- ('residual', 256, 6),
- ('residual', 512, 3),
- ],
- 50: [
- ('bottleneck', 64, 3),
- ('bottleneck', 128, 4),
- ('bottleneck', 256, 6),
- ('bottleneck', 512, 3),
- ],
- 101: [
- ('bottleneck', 64, 3),
- ('bottleneck', 128, 4),
- ('bottleneck', 256, 23),
- ('bottleneck', 512, 3),
- ],
- 152: [
- ('bottleneck', 64, 3),
- ('bottleneck', 128, 8),
- ('bottleneck', 256, 36),
- ('bottleneck', 512, 3),
- ],
- 200: [
- ('bottleneck', 64, 3),
- ('bottleneck', 128, 24),
- ('bottleneck', 256, 36),
- ('bottleneck', 512, 3),
- ],
- 270: [
- ('bottleneck', 64, 4),
- ('bottleneck', 128, 29),
- ('bottleneck', 256, 53),
- ('bottleneck', 512, 4),
- ],
- 350: [
- ('bottleneck', 64, 4),
- ('bottleneck', 128, 36),
- ('bottleneck', 256, 72),
- ('bottleneck', 512, 4),
- ],
- 420: [
- ('bottleneck', 64, 4),
- ('bottleneck', 128, 44),
- ('bottleneck', 256, 87),
- ('bottleneck', 512, 4),
- ],
-}
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class ResNet(tf.keras.Model):
- """Creates ResNet and ResNet-RS family models.
-
- This implements the Deep Residual Network from:
- Kaiming He, Xiangyu Zhang, Shaoqing Ren, Jian Sun.
- Deep Residual Learning for Image Recognition.
- (https://arxiv.org/pdf/1512.03385) and
- Irwan Bello, William Fedus, Xianzhi Du, Ekin D. Cubuk, Aravind Srinivas,
- Tsung-Yi Lin, Jonathon Shlens, Barret Zoph.
- Revisiting ResNets: Improved Training and Scaling Strategies.
- (https://arxiv.org/abs/2103.07579).
- """
-
- def __init__(
- self,
- model_id: int,
- input_specs: tf.keras.layers.InputSpec = layers.InputSpec(
- shape=[None, None, None, 3]),
- depth_multiplier: float = 1.0,
- stem_type: str = 'v0',
- resnetd_shortcut: bool = False,
- replace_stem_max_pool: bool = False,
- se_ratio: Optional[float] = None,
- init_stochastic_depth_rate: float = 0.0,
- scale_stem: bool = True,
- activation: str = 'relu',
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- kernel_initializer: str = 'VarianceScaling',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bn_trainable: bool = True,
- **kwargs):
- """Initializes a ResNet model.
-
- Args:
- model_id: An `int` of the depth of ResNet backbone model.
- input_specs: A `tf.keras.layers.InputSpec` of the input tensor.
- depth_multiplier: A `float` of the depth multiplier to uniformaly scale up
- all layers in channel size. This argument is also referred to as
- `width_multiplier` in (https://arxiv.org/abs/2103.07579).
- stem_type: A `str` of stem type of ResNet. Default to `v0`. If set to
- `v1`, use ResNet-D type stem (https://arxiv.org/abs/1812.01187).
- resnetd_shortcut: A `bool` of whether to use ResNet-D shortcut in
- downsampling blocks.
- replace_stem_max_pool: A `bool` of whether to replace the max pool in stem
- with a stride-2 conv,
- se_ratio: A `float` or None. Ratio of the Squeeze-and-Excitation layer.
- init_stochastic_depth_rate: A `float` of initial stochastic depth rate.
- scale_stem: A `bool` of whether to scale stem layers.
- activation: A `str` name of the activation function.
- use_sync_bn: If True, use synchronized batch normalization.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A small `float` added to variance to avoid dividing by zero.
- kernel_initializer: A str for kernel initializer of convolutional layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default to None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2D.
- Default to None.
- bn_trainable: A `bool` that indicates whether batch norm layers should be
- trainable. Default to True.
- **kwargs: Additional keyword arguments to be passed.
- """
- self._model_id = model_id
- self._input_specs = input_specs
- self._depth_multiplier = depth_multiplier
- self._stem_type = stem_type
- self._resnetd_shortcut = resnetd_shortcut
- self._replace_stem_max_pool = replace_stem_max_pool
- self._se_ratio = se_ratio
- self._init_stochastic_depth_rate = init_stochastic_depth_rate
- self._scale_stem = scale_stem
- self._use_sync_bn = use_sync_bn
- self._activation = activation
- self._norm_momentum = norm_momentum
- self._norm_epsilon = norm_epsilon
- if use_sync_bn:
- self._norm = layers.experimental.SyncBatchNormalization
- else:
- self._norm = layers.BatchNormalization
- self._kernel_initializer = kernel_initializer
- self._kernel_regularizer = kernel_regularizer
- self._bias_regularizer = bias_regularizer
- self._bn_trainable = bn_trainable
-
- if tf.keras.backend.image_data_format() == 'channels_last':
- bn_axis = -1
- else:
- bn_axis = 1
-
- # Build ResNet.
- inputs = tf.keras.Input(shape=input_specs.shape[1:])
-
- stem_depth_multiplier = self._depth_multiplier if scale_stem else 1.0
- if stem_type == 'v0':
- x = layers.Conv2D(
- filters=int(64 * stem_depth_multiplier),
- kernel_size=7,
- strides=2,
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- inputs)
- x = self._norm(
- axis=bn_axis,
- momentum=norm_momentum,
- epsilon=norm_epsilon,
- trainable=bn_trainable)(
- x)
- x = tf_utils.get_activation(activation, use_keras_layer=True)(x)
- elif stem_type == 'v1':
- x = layers.Conv2D(
- filters=int(32 * stem_depth_multiplier),
- kernel_size=3,
- strides=2,
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- inputs)
- x = self._norm(
- axis=bn_axis,
- momentum=norm_momentum,
- epsilon=norm_epsilon,
- trainable=bn_trainable)(
- x)
- x = tf_utils.get_activation(activation, use_keras_layer=True)(x)
- x = layers.Conv2D(
- filters=int(32 * stem_depth_multiplier),
- kernel_size=3,
- strides=1,
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- x)
- x = self._norm(
- axis=bn_axis,
- momentum=norm_momentum,
- epsilon=norm_epsilon,
- trainable=bn_trainable)(
- x)
- x = tf_utils.get_activation(activation, use_keras_layer=True)(x)
- x = layers.Conv2D(
- filters=int(64 * stem_depth_multiplier),
- kernel_size=3,
- strides=1,
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- x)
- x = self._norm(
- axis=bn_axis,
- momentum=norm_momentum,
- epsilon=norm_epsilon,
- trainable=bn_trainable)(
- x)
- x = tf_utils.get_activation(activation, use_keras_layer=True)(x)
- else:
- raise ValueError('Stem type {} not supported.'.format(stem_type))
-
- if replace_stem_max_pool:
- x = layers.Conv2D(
- filters=int(64 * self._depth_multiplier),
- kernel_size=3,
- strides=2,
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- x)
- x = self._norm(
- axis=bn_axis,
- momentum=norm_momentum,
- epsilon=norm_epsilon,
- trainable=bn_trainable)(
- x)
- x = tf_utils.get_activation(activation, use_keras_layer=True)(x)
- else:
- x = layers.MaxPool2D(pool_size=3, strides=2, padding='same')(x)
-
- endpoints = {}
- for i, spec in enumerate(RESNET_SPECS[model_id]):
- if spec[0] == 'residual':
- block_fn = nn_blocks.ResidualBlock
- elif spec[0] == 'bottleneck':
- block_fn = nn_blocks.BottleneckBlock
- else:
- raise ValueError('Block fn `{}` is not supported.'.format(spec[0]))
- x = self._block_group(
- inputs=x,
- filters=int(spec[1] * self._depth_multiplier),
- strides=(1 if i == 0 else 2),
- block_fn=block_fn,
- block_repeats=spec[2],
- stochastic_depth_drop_rate=nn_layers.get_stochastic_depth_rate(
- self._init_stochastic_depth_rate, i + 2, 5),
- name='block_group_l{}'.format(i + 2))
- endpoints[str(i + 2)] = x
-
- self._output_specs = {l: endpoints[l].get_shape() for l in endpoints}
-
- super(ResNet, self).__init__(inputs=inputs, outputs=endpoints, **kwargs)
-
- def _block_group(self,
- inputs: tf.Tensor,
- filters: int,
- strides: int,
- block_fn: Callable[..., tf.keras.layers.Layer],
- block_repeats: int = 1,
- stochastic_depth_drop_rate: float = 0.0,
- name: str = 'block_group'):
- """Creates one group of blocks for the ResNet model.
-
- Args:
- inputs: A `tf.Tensor` of size `[batch, channels, height, width]`.
- filters: An `int` number of filters for the first convolution of the
- layer.
- strides: An `int` stride to use for the first convolution of the layer.
- If greater than 1, this layer will downsample the input.
- block_fn: The type of block group. Either `nn_blocks.ResidualBlock` or
- `nn_blocks.BottleneckBlock`.
- block_repeats: An `int` number of blocks contained in the layer.
- stochastic_depth_drop_rate: A `float` of drop rate of the current block
- group.
- name: A `str` name for the block.
-
- Returns:
- The output `tf.Tensor` of the block layer.
- """
- x = block_fn(
- filters=filters,
- strides=strides,
- use_projection=True,
- stochastic_depth_drop_rate=stochastic_depth_drop_rate,
- se_ratio=self._se_ratio,
- resnetd_shortcut=self._resnetd_shortcut,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer,
- activation=self._activation,
- use_sync_bn=self._use_sync_bn,
- norm_momentum=self._norm_momentum,
- norm_epsilon=self._norm_epsilon,
- bn_trainable=self._bn_trainable)(
- inputs)
-
- for _ in range(1, block_repeats):
- x = block_fn(
- filters=filters,
- strides=1,
- use_projection=False,
- stochastic_depth_drop_rate=stochastic_depth_drop_rate,
- se_ratio=self._se_ratio,
- resnetd_shortcut=self._resnetd_shortcut,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer,
- activation=self._activation,
- use_sync_bn=self._use_sync_bn,
- norm_momentum=self._norm_momentum,
- norm_epsilon=self._norm_epsilon,
- bn_trainable=self._bn_trainable)(
- x)
-
- return tf.keras.layers.Activation('linear', name=name)(x)
-
- def get_config(self):
- config_dict = {
- 'model_id': self._model_id,
- 'depth_multiplier': self._depth_multiplier,
- 'stem_type': self._stem_type,
- 'resnetd_shortcut': self._resnetd_shortcut,
- 'replace_stem_max_pool': self._replace_stem_max_pool,
- 'activation': self._activation,
- 'se_ratio': self._se_ratio,
- 'init_stochastic_depth_rate': self._init_stochastic_depth_rate,
- 'scale_stem': self._scale_stem,
- 'use_sync_bn': self._use_sync_bn,
- 'norm_momentum': self._norm_momentum,
- 'norm_epsilon': self._norm_epsilon,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- 'bias_regularizer': self._bias_regularizer,
- 'bn_trainable': self._bn_trainable
- }
- return config_dict
-
- @classmethod
- def from_config(cls, config, custom_objects=None):
- return cls(**config)
-
- @property
- def output_specs(self):
- """A dict of {level: TensorShape} pairs for the model output."""
- return self._output_specs
-
-
-@factory.register_backbone_builder('resnet')
-def build_resnet(
- input_specs: tf.keras.layers.InputSpec,
- backbone_config: hyperparams.Config,
- norm_activation_config: hyperparams.Config,
- l2_regularizer: tf.keras.regularizers.Regularizer = None) -> tf.keras.Model: # pytype: disable=annotation-type-mismatch # typed-keras
- """Builds ResNet backbone from a config."""
- backbone_type = backbone_config.type
- backbone_cfg = backbone_config.get()
- assert backbone_type == 'resnet', (f'Inconsistent backbone type '
- f'{backbone_type}')
-
- return ResNet(
- model_id=backbone_cfg.model_id,
- input_specs=input_specs,
- depth_multiplier=backbone_cfg.depth_multiplier,
- stem_type=backbone_cfg.stem_type,
- resnetd_shortcut=backbone_cfg.resnetd_shortcut,
- replace_stem_max_pool=backbone_cfg.replace_stem_max_pool,
- se_ratio=backbone_cfg.se_ratio,
- init_stochastic_depth_rate=backbone_cfg.stochastic_depth_drop_rate,
- scale_stem=backbone_cfg.scale_stem,
- activation=norm_activation_config.activation,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon,
- kernel_regularizer=l2_regularizer,
- bn_trainable=backbone_cfg.bn_trainable)
diff --git a/official/vision/beta/modeling/backbones/resnet_3d.py b/official/vision/beta/modeling/backbones/resnet_3d.py
deleted file mode 100644
index ac949b58dc326bbb8f3d6c36ed158bdba4da8abb..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/resnet_3d.py
+++ /dev/null
@@ -1,454 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains definitions of 3D Residual Networks."""
-from typing import Callable, List, Tuple, Optional
-
-# Import libraries
-import tensorflow as tf
-
-from official.modeling import hyperparams
-from official.modeling import tf_utils
-from official.vision.beta.modeling.backbones import factory
-from official.vision.beta.modeling.layers import nn_blocks_3d
-from official.vision.beta.modeling.layers import nn_layers
-
-layers = tf.keras.layers
-
-RESNET_SPECS = {
- 50: [
- ('bottleneck3d', 64, 3),
- ('bottleneck3d', 128, 4),
- ('bottleneck3d', 256, 6),
- ('bottleneck3d', 512, 3),
- ],
- 101: [
- ('bottleneck3d', 64, 3),
- ('bottleneck3d', 128, 4),
- ('bottleneck3d', 256, 23),
- ('bottleneck3d', 512, 3),
- ],
- 152: [
- ('bottleneck3d', 64, 3),
- ('bottleneck3d', 128, 8),
- ('bottleneck3d', 256, 36),
- ('bottleneck3d', 512, 3),
- ],
- 200: [
- ('bottleneck3d', 64, 3),
- ('bottleneck3d', 128, 24),
- ('bottleneck3d', 256, 36),
- ('bottleneck3d', 512, 3),
- ],
- 270: [
- ('bottleneck3d', 64, 4),
- ('bottleneck3d', 128, 29),
- ('bottleneck3d', 256, 53),
- ('bottleneck3d', 512, 4),
- ],
- 300: [
- ('bottleneck3d', 64, 4),
- ('bottleneck3d', 128, 36),
- ('bottleneck3d', 256, 54),
- ('bottleneck3d', 512, 4),
- ],
- 350: [
- ('bottleneck3d', 64, 4),
- ('bottleneck3d', 128, 36),
- ('bottleneck3d', 256, 72),
- ('bottleneck3d', 512, 4),
- ],
-}
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class ResNet3D(tf.keras.Model):
- """Creates a 3D ResNet family model."""
-
- def __init__(
- self,
- model_id: int,
- temporal_strides: List[int],
- temporal_kernel_sizes: List[Tuple[int]],
- use_self_gating: Optional[List[int]] = None,
- input_specs: tf.keras.layers.InputSpec = layers.InputSpec(
- shape=[None, None, None, None, 3]),
- stem_type: str = 'v0',
- stem_conv_temporal_kernel_size: int = 5,
- stem_conv_temporal_stride: int = 2,
- stem_pool_temporal_stride: int = 2,
- init_stochastic_depth_rate: float = 0.0,
- activation: str = 'relu',
- se_ratio: Optional[float] = None,
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- kernel_initializer: str = 'VarianceScaling',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- **kwargs):
- """Initializes a 3D ResNet model.
-
- Args:
- model_id: An `int` of depth of ResNet backbone model.
- temporal_strides: A list of integers that specifies the temporal strides
- for all 3d blocks.
- temporal_kernel_sizes: A list of tuples that specifies the temporal kernel
- sizes for all 3d blocks in different block groups.
- use_self_gating: A list of booleans to specify applying self-gating module
- or not in each block group. If None, self-gating is not applied.
- input_specs: A `tf.keras.layers.InputSpec` of the input tensor.
- stem_type: A `str` of stem type of ResNet. Default to `v0`. If set to
- `v1`, use ResNet-D type stem (https://arxiv.org/abs/1812.01187).
- stem_conv_temporal_kernel_size: An `int` of temporal kernel size for the
- first conv layer.
- stem_conv_temporal_stride: An `int` of temporal stride for the first conv
- layer.
- stem_pool_temporal_stride: An `int` of temporal stride for the first pool
- layer.
- init_stochastic_depth_rate: A `float` of initial stochastic depth rate.
- activation: A `str` of name of the activation function.
- se_ratio: A `float` or None. Ratio of the Squeeze-and-Excitation layer.
- use_sync_bn: If True, use synchronized batch normalization.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- kernel_initializer: A str for kernel initializer of convolutional layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default to None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2D.
- Default to None.
- **kwargs: Additional keyword arguments to be passed.
- """
- self._model_id = model_id
- self._temporal_strides = temporal_strides
- self._temporal_kernel_sizes = temporal_kernel_sizes
- self._input_specs = input_specs
- self._stem_type = stem_type
- self._stem_conv_temporal_kernel_size = stem_conv_temporal_kernel_size
- self._stem_conv_temporal_stride = stem_conv_temporal_stride
- self._stem_pool_temporal_stride = stem_pool_temporal_stride
- self._use_self_gating = use_self_gating
- self._se_ratio = se_ratio
- self._init_stochastic_depth_rate = init_stochastic_depth_rate
- self._use_sync_bn = use_sync_bn
- self._activation = activation
- self._norm_momentum = norm_momentum
- self._norm_epsilon = norm_epsilon
- if use_sync_bn:
- self._norm = layers.experimental.SyncBatchNormalization
- else:
- self._norm = layers.BatchNormalization
- self._kernel_initializer = kernel_initializer
- self._kernel_regularizer = kernel_regularizer
- self._bias_regularizer = bias_regularizer
- if tf.keras.backend.image_data_format() == 'channels_last':
- bn_axis = -1
- else:
- bn_axis = 1
-
- # Build ResNet3D backbone.
- inputs = tf.keras.Input(shape=input_specs.shape[1:])
-
- # Build stem.
- if stem_type == 'v0':
- x = layers.Conv3D(
- filters=64,
- kernel_size=[stem_conv_temporal_kernel_size, 7, 7],
- strides=[stem_conv_temporal_stride, 2, 2],
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- inputs)
- x = self._norm(
- axis=bn_axis, momentum=norm_momentum, epsilon=norm_epsilon)(
- x)
- x = tf_utils.get_activation(activation)(x)
- elif stem_type == 'v1':
- x = layers.Conv3D(
- filters=32,
- kernel_size=[stem_conv_temporal_kernel_size, 3, 3],
- strides=[stem_conv_temporal_stride, 2, 2],
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- inputs)
- x = self._norm(
- axis=bn_axis, momentum=norm_momentum, epsilon=norm_epsilon)(
- x)
- x = tf_utils.get_activation(activation)(x)
- x = layers.Conv3D(
- filters=32,
- kernel_size=[1, 3, 3],
- strides=[1, 1, 1],
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- x)
- x = self._norm(
- axis=bn_axis, momentum=norm_momentum, epsilon=norm_epsilon)(
- x)
- x = tf_utils.get_activation(activation)(x)
- x = layers.Conv3D(
- filters=64,
- kernel_size=[1, 3, 3],
- strides=[1, 1, 1],
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- x)
- x = self._norm(
- axis=bn_axis, momentum=norm_momentum, epsilon=norm_epsilon)(
- x)
- x = tf_utils.get_activation(activation)(x)
- else:
- raise ValueError(f'Stem type {stem_type} not supported.')
-
- temporal_kernel_size = 1 if stem_pool_temporal_stride == 1 else 3
- x = layers.MaxPool3D(
- pool_size=[temporal_kernel_size, 3, 3],
- strides=[stem_pool_temporal_stride, 2, 2],
- padding='same')(
- x)
-
- # Build intermediate blocks and endpoints.
- resnet_specs = RESNET_SPECS[model_id]
- if len(temporal_strides) != len(resnet_specs) or len(
- temporal_kernel_sizes) != len(resnet_specs):
- raise ValueError(
- 'Number of blocks in temporal specs should equal to resnet_specs.')
-
- endpoints = {}
- for i, resnet_spec in enumerate(resnet_specs):
- if resnet_spec[0] == 'bottleneck3d':
- block_fn = nn_blocks_3d.BottleneckBlock3D
- else:
- raise ValueError('Block fn `{}` is not supported.'.format(
- resnet_spec[0]))
-
- x = self._block_group(
- inputs=x,
- filters=resnet_spec[1],
- temporal_kernel_sizes=temporal_kernel_sizes[i],
- temporal_strides=temporal_strides[i],
- spatial_strides=(1 if i == 0 else 2),
- block_fn=block_fn,
- block_repeats=resnet_spec[2],
- stochastic_depth_drop_rate=nn_layers.get_stochastic_depth_rate(
- self._init_stochastic_depth_rate, i + 2, 5),
- use_self_gating=use_self_gating[i] if use_self_gating else False,
- name='block_group_l{}'.format(i + 2))
- endpoints[str(i + 2)] = x
-
- self._output_specs = {l: endpoints[l].get_shape() for l in endpoints}
-
- super(ResNet3D, self).__init__(inputs=inputs, outputs=endpoints, **kwargs)
-
- def _block_group(self,
- inputs: tf.Tensor,
- filters: int,
- temporal_kernel_sizes: Tuple[int],
- temporal_strides: int,
- spatial_strides: int,
- block_fn: Callable[
- ...,
- tf.keras.layers.Layer] = nn_blocks_3d.BottleneckBlock3D,
- block_repeats: int = 1,
- stochastic_depth_drop_rate: float = 0.0,
- use_self_gating: bool = False,
- name: str = 'block_group'):
- """Creates one group of blocks for the ResNet3D model.
-
- Args:
- inputs: A `tf.Tensor` of size `[batch, channels, height, width]`.
- filters: An `int` of number of filters for the first convolution of the
- layer.
- temporal_kernel_sizes: A tuple that specifies the temporal kernel sizes
- for each block in the current group.
- temporal_strides: An `int` of temporal strides for the first convolution
- in this group.
- spatial_strides: An `int` stride to use for the first convolution of the
- layer. If greater than 1, this layer will downsample the input.
- block_fn: Either `nn_blocks.ResidualBlock` or `nn_blocks.BottleneckBlock`.
- block_repeats: An `int` of number of blocks contained in the layer.
- stochastic_depth_drop_rate: A `float` of drop rate of the current block
- group.
- use_self_gating: A `bool` that specifies whether to apply self-gating
- module or not.
- name: A `str` name for the block.
-
- Returns:
- The output `tf.Tensor` of the block layer.
- """
- if len(temporal_kernel_sizes) != block_repeats:
- raise ValueError(
- 'Number of elements in `temporal_kernel_sizes` must equal to `block_repeats`.'
- )
-
- # Only apply self-gating module in the last block.
- use_self_gating_list = [False] * (block_repeats - 1) + [use_self_gating]
-
- x = block_fn(
- filters=filters,
- temporal_kernel_size=temporal_kernel_sizes[0],
- temporal_strides=temporal_strides,
- spatial_strides=spatial_strides,
- stochastic_depth_drop_rate=stochastic_depth_drop_rate,
- use_self_gating=use_self_gating_list[0],
- se_ratio=self._se_ratio,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer,
- activation=self._activation,
- use_sync_bn=self._use_sync_bn,
- norm_momentum=self._norm_momentum,
- norm_epsilon=self._norm_epsilon)(
- inputs)
-
- for i in range(1, block_repeats):
- x = block_fn(
- filters=filters,
- temporal_kernel_size=temporal_kernel_sizes[i],
- temporal_strides=1,
- spatial_strides=1,
- stochastic_depth_drop_rate=stochastic_depth_drop_rate,
- use_self_gating=use_self_gating_list[i],
- se_ratio=self._se_ratio,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer,
- activation=self._activation,
- use_sync_bn=self._use_sync_bn,
- norm_momentum=self._norm_momentum,
- norm_epsilon=self._norm_epsilon)(
- x)
-
- return tf.identity(x, name=name)
-
- def get_config(self):
- config_dict = {
- 'model_id': self._model_id,
- 'temporal_strides': self._temporal_strides,
- 'temporal_kernel_sizes': self._temporal_kernel_sizes,
- 'stem_type': self._stem_type,
- 'stem_conv_temporal_kernel_size': self._stem_conv_temporal_kernel_size,
- 'stem_conv_temporal_stride': self._stem_conv_temporal_stride,
- 'stem_pool_temporal_stride': self._stem_pool_temporal_stride,
- 'use_self_gating': self._use_self_gating,
- 'se_ratio': self._se_ratio,
- 'init_stochastic_depth_rate': self._init_stochastic_depth_rate,
- 'activation': self._activation,
- 'use_sync_bn': self._use_sync_bn,
- 'norm_momentum': self._norm_momentum,
- 'norm_epsilon': self._norm_epsilon,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- 'bias_regularizer': self._bias_regularizer,
- }
- return config_dict
-
- @classmethod
- def from_config(cls, config, custom_objects=None):
- return cls(**config)
-
- @property
- def output_specs(self):
- """A dict of {level: TensorShape} pairs for the model output."""
- return self._output_specs
-
-
-@factory.register_backbone_builder('resnet_3d')
-def build_resnet3d(
- input_specs: tf.keras.layers.InputSpec,
- backbone_config: hyperparams.Config,
- norm_activation_config: hyperparams.Config,
- l2_regularizer: Optional[tf.keras.regularizers.Regularizer] = None
-) -> tf.keras.Model:
- """Builds ResNet 3d backbone from a config."""
- backbone_cfg = backbone_config.get()
-
- # Flatten configs before passing to the backbone.
- temporal_strides = []
- temporal_kernel_sizes = []
- use_self_gating = []
- for block_spec in backbone_cfg.block_specs:
- temporal_strides.append(block_spec.temporal_strides)
- temporal_kernel_sizes.append(block_spec.temporal_kernel_sizes)
- use_self_gating.append(block_spec.use_self_gating)
-
- return ResNet3D(
- model_id=backbone_cfg.model_id,
- temporal_strides=temporal_strides,
- temporal_kernel_sizes=temporal_kernel_sizes,
- use_self_gating=use_self_gating,
- input_specs=input_specs,
- stem_type=backbone_cfg.stem_type,
- stem_conv_temporal_kernel_size=backbone_cfg
- .stem_conv_temporal_kernel_size,
- stem_conv_temporal_stride=backbone_cfg.stem_conv_temporal_stride,
- stem_pool_temporal_stride=backbone_cfg.stem_pool_temporal_stride,
- init_stochastic_depth_rate=backbone_cfg.stochastic_depth_drop_rate,
- se_ratio=backbone_cfg.se_ratio,
- activation=norm_activation_config.activation,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon,
- kernel_regularizer=l2_regularizer)
-
-
-@factory.register_backbone_builder('resnet_3d_rs')
-def build_resnet3d_rs(
- input_specs: tf.keras.layers.InputSpec,
- backbone_config: hyperparams.Config,
- norm_activation_config: hyperparams.Config,
- l2_regularizer: Optional[tf.keras.regularizers.Regularizer] = None
-) -> tf.keras.Model:
- """Builds ResNet-3D-RS backbone from a config."""
- backbone_cfg = backbone_config.get()
-
- # Flatten configs before passing to the backbone.
- temporal_strides = []
- temporal_kernel_sizes = []
- use_self_gating = []
- for i, block_spec in enumerate(backbone_cfg.block_specs):
- temporal_strides.append(block_spec.temporal_strides)
- use_self_gating.append(block_spec.use_self_gating)
- block_repeats_i = RESNET_SPECS[backbone_cfg.model_id][i][-1]
- temporal_kernel_sizes.append(list(block_spec.temporal_kernel_sizes) *
- block_repeats_i)
- return ResNet3D(
- model_id=backbone_cfg.model_id,
- temporal_strides=temporal_strides,
- temporal_kernel_sizes=temporal_kernel_sizes,
- use_self_gating=use_self_gating,
- input_specs=input_specs,
- stem_type=backbone_cfg.stem_type,
- stem_conv_temporal_kernel_size=backbone_cfg
- .stem_conv_temporal_kernel_size,
- stem_conv_temporal_stride=backbone_cfg.stem_conv_temporal_stride,
- stem_pool_temporal_stride=backbone_cfg.stem_pool_temporal_stride,
- init_stochastic_depth_rate=backbone_cfg.stochastic_depth_drop_rate,
- se_ratio=backbone_cfg.se_ratio,
- activation=norm_activation_config.activation,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon,
- kernel_regularizer=l2_regularizer)
diff --git a/official/vision/beta/modeling/backbones/resnet_3d_test.py b/official/vision/beta/modeling/backbones/resnet_3d_test.py
deleted file mode 100644
index 3b109edbbe5e4d67190444dc4f51a90562cb4efc..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/resnet_3d_test.py
+++ /dev/null
@@ -1,103 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for resnet."""
-
-# Import libraries
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.vision.beta.modeling.backbones import resnet_3d
-
-
-class ResNet3DTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (128, 50, 4, 'v0', False, 0.0),
- (128, 50, 4, 'v1', False, 0.2),
- (256, 50, 4, 'v1', True, 0.2),
- )
- def test_network_creation(self, input_size, model_id, endpoint_filter_scale,
- stem_type, se_ratio, init_stochastic_depth_rate):
- """Test creation of ResNet3D family models."""
- tf.keras.backend.set_image_data_format('channels_last')
- temporal_strides = [1, 1, 1, 1]
- temporal_kernel_sizes = [(3, 3, 3), (3, 1, 3, 1), (3, 1, 3, 1, 3, 1),
- (1, 3, 1)]
- use_self_gating = [True, False, True, False]
-
- network = resnet_3d.ResNet3D(
- model_id=model_id,
- temporal_strides=temporal_strides,
- temporal_kernel_sizes=temporal_kernel_sizes,
- use_self_gating=use_self_gating,
- stem_type=stem_type,
- se_ratio=se_ratio,
- init_stochastic_depth_rate=init_stochastic_depth_rate)
- inputs = tf.keras.Input(shape=(8, input_size, input_size, 3), batch_size=1)
- endpoints = network(inputs)
-
- self.assertAllEqual([
- 1, 2, input_size / 2**2, input_size / 2**2, 64 * endpoint_filter_scale
- ], endpoints['2'].shape.as_list())
- self.assertAllEqual([
- 1, 2, input_size / 2**3, input_size / 2**3, 128 * endpoint_filter_scale
- ], endpoints['3'].shape.as_list())
- self.assertAllEqual([
- 1, 2, input_size / 2**4, input_size / 2**4, 256 * endpoint_filter_scale
- ], endpoints['4'].shape.as_list())
- self.assertAllEqual([
- 1, 2, input_size / 2**5, input_size / 2**5, 512 * endpoint_filter_scale
- ], endpoints['5'].shape.as_list())
-
- def test_serialize_deserialize(self):
- # Create a network object that sets all of its config options.
- kwargs = dict(
- model_id=50,
- temporal_strides=[1, 1, 1, 1],
- temporal_kernel_sizes=[(3, 3, 3), (3, 1, 3, 1), (3, 1, 3, 1, 3, 1),
- (1, 3, 1)],
- stem_type='v0',
- stem_conv_temporal_kernel_size=5,
- stem_conv_temporal_stride=2,
- stem_pool_temporal_stride=2,
- se_ratio=0.0,
- use_self_gating=None,
- init_stochastic_depth_rate=0.0,
- use_sync_bn=False,
- activation='relu',
- norm_momentum=0.99,
- norm_epsilon=0.001,
- kernel_initializer='VarianceScaling',
- kernel_regularizer=None,
- bias_regularizer=None,
- )
- network = resnet_3d.ResNet3D(**kwargs)
-
- expected_config = dict(kwargs)
- self.assertEqual(network.get_config(), expected_config)
-
- # Create another network object from the first object's config.
- new_network = resnet_3d.ResNet3D.from_config(network.get_config())
-
- # Validate that the config can be forced to JSON.
- _ = new_network.to_json()
-
- # If the serialization was successful, the new config should match the old.
- self.assertAllEqual(network.get_config(), new_network.get_config())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/backbones/resnet_deeplab.py b/official/vision/beta/modeling/backbones/resnet_deeplab.py
deleted file mode 100644
index 5f783644849a75fa811b64fa9d1e95dad7d781f0..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/resnet_deeplab.py
+++ /dev/null
@@ -1,366 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains definitions of Residual Networks with Deeplab modifications."""
-
-from typing import Callable, Optional, Tuple, List
-
-import numpy as np
-import tensorflow as tf
-from official.modeling import hyperparams
-from official.modeling import tf_utils
-from official.vision.beta.modeling.backbones import factory
-from official.vision.beta.modeling.layers import nn_blocks
-from official.vision.beta.modeling.layers import nn_layers
-
-layers = tf.keras.layers
-
-# Specifications for different ResNet variants.
-# Each entry specifies block configurations of the particular ResNet variant.
-# Each element in the block configuration is in the following format:
-# (block_fn, num_filters, block_repeats)
-RESNET_SPECS = {
- 50: [
- ('bottleneck', 64, 3),
- ('bottleneck', 128, 4),
- ('bottleneck', 256, 6),
- ('bottleneck', 512, 3),
- ],
- 101: [
- ('bottleneck', 64, 3),
- ('bottleneck', 128, 4),
- ('bottleneck', 256, 23),
- ('bottleneck', 512, 3),
- ],
-}
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class DilatedResNet(tf.keras.Model):
- """Creates a ResNet model with Deeplabv3 modifications.
-
- This backbone is suitable for semantic segmentation. This implements
- Liang-Chieh Chen, George Papandreou, Florian Schroff, Hartwig Adam.
- Rethinking Atrous Convolution for Semantic Image Segmentation.
- (https://arxiv.org/pdf/1706.05587)
- """
-
- def __init__(
- self,
- model_id: int,
- output_stride: int,
- input_specs: tf.keras.layers.InputSpec = layers.InputSpec(
- shape=[None, None, None, 3]),
- stem_type: str = 'v0',
- se_ratio: Optional[float] = None,
- init_stochastic_depth_rate: float = 0.0,
- multigrid: Optional[Tuple[int]] = None,
- last_stage_repeats: int = 1,
- activation: str = 'relu',
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- kernel_initializer: str = 'VarianceScaling',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- **kwargs):
- """Initializes a ResNet model with DeepLab modification.
-
- Args:
- model_id: An `int` specifies depth of ResNet backbone model.
- output_stride: An `int` of output stride, ratio of input to output
- resolution.
- input_specs: A `tf.keras.layers.InputSpec` of the input tensor.
- stem_type: A `str` of stem type. Can be `v0` or `v1`. `v1` replaces 7x7
- conv by 3 3x3 convs.
- se_ratio: A `float` or None. Ratio of the Squeeze-and-Excitation layer.
- init_stochastic_depth_rate: A `float` of initial stochastic depth rate.
- multigrid: A tuple of the same length as the number of blocks in the last
- resnet stage.
- last_stage_repeats: An `int` that specifies how many times last stage is
- repeated.
- activation: A `str` name of the activation function.
- use_sync_bn: If True, use synchronized batch normalization.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- kernel_initializer: A str for kernel initializer of convolutional layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default to None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2D.
- Default to None.
- **kwargs: Additional keyword arguments to be passed.
- """
- self._model_id = model_id
- self._output_stride = output_stride
- self._input_specs = input_specs
- self._use_sync_bn = use_sync_bn
- self._activation = activation
- self._norm_momentum = norm_momentum
- self._norm_epsilon = norm_epsilon
- if use_sync_bn:
- self._norm = layers.experimental.SyncBatchNormalization
- else:
- self._norm = layers.BatchNormalization
- self._kernel_initializer = kernel_initializer
- self._kernel_regularizer = kernel_regularizer
- self._bias_regularizer = bias_regularizer
- self._stem_type = stem_type
- self._se_ratio = se_ratio
- self._init_stochastic_depth_rate = init_stochastic_depth_rate
-
- if tf.keras.backend.image_data_format() == 'channels_last':
- bn_axis = -1
- else:
- bn_axis = 1
-
- # Build ResNet.
- inputs = tf.keras.Input(shape=input_specs.shape[1:])
-
- if stem_type == 'v0':
- x = layers.Conv2D(
- filters=64,
- kernel_size=7,
- strides=2,
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- inputs)
- x = self._norm(
- axis=bn_axis, momentum=norm_momentum, epsilon=norm_epsilon)(
- x)
- x = tf_utils.get_activation(activation)(x)
- elif stem_type == 'v1':
- x = layers.Conv2D(
- filters=64,
- kernel_size=3,
- strides=2,
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- inputs)
- x = self._norm(
- axis=bn_axis, momentum=norm_momentum, epsilon=norm_epsilon)(
- x)
- x = tf_utils.get_activation(activation)(x)
- x = layers.Conv2D(
- filters=64,
- kernel_size=3,
- strides=1,
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- x)
- x = self._norm(
- axis=bn_axis, momentum=norm_momentum, epsilon=norm_epsilon)(
- x)
- x = tf_utils.get_activation(activation)(x)
- x = layers.Conv2D(
- filters=128,
- kernel_size=3,
- strides=1,
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- x)
- x = self._norm(
- axis=bn_axis, momentum=norm_momentum, epsilon=norm_epsilon)(
- x)
- x = tf_utils.get_activation(activation)(x)
- else:
- raise ValueError('Stem type {} not supported.'.format(stem_type))
-
- x = layers.MaxPool2D(pool_size=3, strides=2, padding='same')(x)
-
- normal_resnet_stage = int(np.math.log2(self._output_stride)) - 2
-
- endpoints = {}
- for i in range(normal_resnet_stage + 1):
- spec = RESNET_SPECS[model_id][i]
- if spec[0] == 'bottleneck':
- block_fn = nn_blocks.BottleneckBlock
- else:
- raise ValueError('Block fn `{}` is not supported.'.format(spec[0]))
- x = self._block_group(
- inputs=x,
- filters=spec[1],
- strides=(1 if i == 0 else 2),
- dilation_rate=1,
- block_fn=block_fn,
- block_repeats=spec[2],
- stochastic_depth_drop_rate=nn_layers.get_stochastic_depth_rate(
- self._init_stochastic_depth_rate, i + 2, 4 + last_stage_repeats),
- name='block_group_l{}'.format(i + 2))
- endpoints[str(i + 2)] = x
-
- dilation_rate = 2
- for i in range(normal_resnet_stage + 1, 3 + last_stage_repeats):
- spec = RESNET_SPECS[model_id][i] if i < 3 else RESNET_SPECS[model_id][-1]
- if spec[0] == 'bottleneck':
- block_fn = nn_blocks.BottleneckBlock
- else:
- raise ValueError('Block fn `{}` is not supported.'.format(spec[0]))
- x = self._block_group(
- inputs=x,
- filters=spec[1],
- strides=1,
- dilation_rate=dilation_rate,
- block_fn=block_fn,
- block_repeats=spec[2],
- stochastic_depth_drop_rate=nn_layers.get_stochastic_depth_rate(
- self._init_stochastic_depth_rate, i + 2, 4 + last_stage_repeats),
- multigrid=multigrid if i >= 3 else None,
- name='block_group_l{}'.format(i + 2))
- dilation_rate *= 2
-
- endpoints[str(normal_resnet_stage + 2)] = x
-
- self._output_specs = {l: endpoints[l].get_shape() for l in endpoints}
-
- super(DilatedResNet, self).__init__(
- inputs=inputs, outputs=endpoints, **kwargs)
-
- def _block_group(self,
- inputs: tf.Tensor,
- filters: int,
- strides: int,
- dilation_rate: int,
- block_fn: Callable[..., tf.keras.layers.Layer],
- block_repeats: int = 1,
- stochastic_depth_drop_rate: float = 0.0,
- multigrid: Optional[List[int]] = None,
- name: str = 'block_group'):
- """Creates one group of blocks for the ResNet model.
-
- Deeplab applies strides at the last block.
-
- Args:
- inputs: A `tf.Tensor` of size `[batch, channels, height, width]`.
- filters: An `int` off number of filters for the first convolution of the
- layer.
- strides: An `int` of stride to use for the first convolution of the layer.
- If greater than 1, this layer will downsample the input.
- dilation_rate: An `int` of diluted convolution rates.
- block_fn: Either `nn_blocks.ResidualBlock` or `nn_blocks.BottleneckBlock`.
- block_repeats: An `int` of number of blocks contained in the layer.
- stochastic_depth_drop_rate: A `float` of drop rate of the current block
- group.
- multigrid: A list of `int` or None. If specified, dilation rates for each
- block is scaled up by its corresponding factor in the multigrid.
- name: A `str` name for the block.
-
- Returns:
- The output `tf.Tensor` of the block layer.
- """
- if multigrid is not None and len(multigrid) != block_repeats:
- raise ValueError('multigrid has to match number of block_repeats')
-
- if multigrid is None:
- multigrid = [1] * block_repeats
-
- # TODO(arashwan): move striding at the of the block.
- x = block_fn(
- filters=filters,
- strides=strides,
- dilation_rate=dilation_rate * multigrid[0],
- use_projection=True,
- stochastic_depth_drop_rate=stochastic_depth_drop_rate,
- se_ratio=self._se_ratio,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer,
- activation=self._activation,
- use_sync_bn=self._use_sync_bn,
- norm_momentum=self._norm_momentum,
- norm_epsilon=self._norm_epsilon)(
- inputs)
- for i in range(1, block_repeats):
- x = block_fn(
- filters=filters,
- strides=1,
- dilation_rate=dilation_rate * multigrid[i],
- use_projection=False,
- stochastic_depth_drop_rate=stochastic_depth_drop_rate,
- se_ratio=self._se_ratio,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer,
- activation=self._activation,
- use_sync_bn=self._use_sync_bn,
- norm_momentum=self._norm_momentum,
- norm_epsilon=self._norm_epsilon)(
- x)
-
- return tf.identity(x, name=name)
-
- def get_config(self):
- config_dict = {
- 'model_id': self._model_id,
- 'output_stride': self._output_stride,
- 'stem_type': self._stem_type,
- 'se_ratio': self._se_ratio,
- 'init_stochastic_depth_rate': self._init_stochastic_depth_rate,
- 'activation': self._activation,
- 'use_sync_bn': self._use_sync_bn,
- 'norm_momentum': self._norm_momentum,
- 'norm_epsilon': self._norm_epsilon,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- 'bias_regularizer': self._bias_regularizer,
- }
- return config_dict
-
- @classmethod
- def from_config(cls, config, custom_objects=None):
- return cls(**config)
-
- @property
- def output_specs(self):
- """A dict of {level: TensorShape} pairs for the model output."""
- return self._output_specs
-
-
-@factory.register_backbone_builder('dilated_resnet')
-def build_dilated_resnet(
- input_specs: tf.keras.layers.InputSpec,
- backbone_config: hyperparams.Config,
- norm_activation_config: hyperparams.Config,
- l2_regularizer: tf.keras.regularizers.Regularizer = None) -> tf.keras.Model: # pytype: disable=annotation-type-mismatch # typed-keras
- """Builds ResNet backbone from a config."""
- backbone_type = backbone_config.type
- backbone_cfg = backbone_config.get()
- assert backbone_type == 'dilated_resnet', (f'Inconsistent backbone type '
- f'{backbone_type}')
-
- return DilatedResNet(
- model_id=backbone_cfg.model_id,
- output_stride=backbone_cfg.output_stride,
- input_specs=input_specs,
- stem_type=backbone_cfg.stem_type,
- se_ratio=backbone_cfg.se_ratio,
- init_stochastic_depth_rate=backbone_cfg.stochastic_depth_drop_rate,
- multigrid=backbone_cfg.multigrid,
- last_stage_repeats=backbone_cfg.last_stage_repeats,
- activation=norm_activation_config.activation,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon,
- kernel_regularizer=l2_regularizer)
diff --git a/official/vision/beta/modeling/backbones/resnet_deeplab_test.py b/official/vision/beta/modeling/backbones/resnet_deeplab_test.py
deleted file mode 100644
index 2c8ce7d64de94faaa89ee111b6930c8f94a09305..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/resnet_deeplab_test.py
+++ /dev/null
@@ -1,144 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for resnet_deeplab models."""
-
-# Import libraries
-from absl.testing import parameterized
-import numpy as np
-import tensorflow as tf
-
-from tensorflow.python.distribute import combinations
-from tensorflow.python.distribute import strategy_combinations
-from official.vision.beta.modeling.backbones import resnet_deeplab
-
-
-class ResNetTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (128, 50, 4, 8),
- (128, 101, 4, 8),
- (128, 50, 4, 16),
- (128, 101, 4, 16),
- )
- def test_network_creation(self, input_size, model_id,
- endpoint_filter_scale, output_stride):
- """Test creation of ResNet models."""
- tf.keras.backend.set_image_data_format('channels_last')
-
- network = resnet_deeplab.DilatedResNet(model_id=model_id,
- output_stride=output_stride)
- inputs = tf.keras.Input(shape=(input_size, input_size, 3), batch_size=1)
- endpoints = network(inputs)
- print(endpoints)
- self.assertAllEqual([
- 1, input_size / output_stride, input_size / output_stride,
- 512 * endpoint_filter_scale
- ], endpoints[str(int(np.math.log2(output_stride)))].shape.as_list())
-
- @parameterized.parameters(
- ('v0', None, 0.0),
- ('v1', None, 0.0),
- ('v1', 0.25, 0.0),
- ('v1', 0.25, 0.2),
- )
- def test_network_features(self, stem_type, se_ratio,
- init_stochastic_depth_rate):
- """Test additional features of ResNet models."""
- input_size = 128
- model_id = 50
- endpoint_filter_scale = 4
- output_stride = 8
-
- tf.keras.backend.set_image_data_format('channels_last')
-
- network = resnet_deeplab.DilatedResNet(
- model_id=model_id,
- output_stride=output_stride,
- stem_type=stem_type,
- se_ratio=se_ratio,
- init_stochastic_depth_rate=init_stochastic_depth_rate)
- inputs = tf.keras.Input(shape=(input_size, input_size, 3), batch_size=1)
- endpoints = network(inputs)
- print(endpoints)
- self.assertAllEqual([
- 1, input_size / output_stride, input_size / output_stride,
- 512 * endpoint_filter_scale
- ], endpoints[str(int(np.math.log2(output_stride)))].shape.as_list())
-
- @combinations.generate(
- combinations.combine(
- strategy=[
- strategy_combinations.cloud_tpu_strategy,
- strategy_combinations.one_device_strategy_gpu,
- ],
- use_sync_bn=[False, True],
- ))
- def test_sync_bn_multiple_devices(self, strategy, use_sync_bn):
- """Test for sync bn on TPU and GPU devices."""
- inputs = np.random.rand(64, 128, 128, 3)
-
- tf.keras.backend.set_image_data_format('channels_last')
-
- with strategy.scope():
- network = resnet_deeplab.DilatedResNet(
- model_id=50, output_stride=8, use_sync_bn=use_sync_bn)
- _ = network(inputs)
-
- @parameterized.parameters(1, 3, 4)
- def test_input_specs(self, input_dim):
- """Test different input feature dimensions."""
- tf.keras.backend.set_image_data_format('channels_last')
-
- input_specs = tf.keras.layers.InputSpec(shape=[None, None, None, input_dim])
- network = resnet_deeplab.DilatedResNet(
- model_id=50, output_stride=8, input_specs=input_specs)
-
- inputs = tf.keras.Input(shape=(128, 128, input_dim), batch_size=1)
- _ = network(inputs)
-
- def test_serialize_deserialize(self):
- # Create a network object that sets all of its config options.
- kwargs = dict(
- model_id=50,
- output_stride=8,
- stem_type='v0',
- se_ratio=0.25,
- init_stochastic_depth_rate=0.2,
- use_sync_bn=False,
- activation='relu',
- norm_momentum=0.99,
- norm_epsilon=0.001,
- kernel_initializer='VarianceScaling',
- kernel_regularizer=None,
- bias_regularizer=None,
- )
- network = resnet_deeplab.DilatedResNet(**kwargs)
-
- expected_config = dict(kwargs)
- self.assertEqual(network.get_config(), expected_config)
-
- # Create another network object from the first object's config.
- new_network = resnet_deeplab.DilatedResNet.from_config(network.get_config())
-
- # Validate that the config can be forced to JSON.
- _ = new_network.to_json()
-
- # If the serialization was successful, the new config should match the old.
- self.assertAllEqual(network.get_config(), new_network.get_config())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/backbones/resnet_test.py b/official/vision/beta/modeling/backbones/resnet_test.py
deleted file mode 100644
index 534963eb57cdd3a5a1a58955c36afe5b6447b578..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/resnet_test.py
+++ /dev/null
@@ -1,156 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for resnet."""
-
-# Import libraries
-from absl.testing import parameterized
-import numpy as np
-import tensorflow as tf
-
-from tensorflow.python.distribute import combinations
-from tensorflow.python.distribute import strategy_combinations
-from official.vision.beta.modeling.backbones import resnet
-
-
-class ResNetTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (128, 10, 1),
- (128, 18, 1),
- (128, 34, 1),
- (128, 50, 4),
- (128, 101, 4),
- (128, 152, 4),
- )
- def test_network_creation(self, input_size, model_id,
- endpoint_filter_scale):
- """Test creation of ResNet family models."""
- resnet_params = {
- 10: 4915904,
- 18: 11190464,
- 34: 21306048,
- 50: 23561152,
- 101: 42605504,
- 152: 58295232,
- }
- tf.keras.backend.set_image_data_format('channels_last')
-
- network = resnet.ResNet(model_id=model_id)
- self.assertEqual(network.count_params(), resnet_params[model_id])
-
- inputs = tf.keras.Input(shape=(input_size, input_size, 3), batch_size=1)
- endpoints = network(inputs)
-
- self.assertAllEqual(
- [1, input_size / 2**2, input_size / 2**2, 64 * endpoint_filter_scale],
- endpoints['2'].shape.as_list())
- self.assertAllEqual(
- [1, input_size / 2**3, input_size / 2**3, 128 * endpoint_filter_scale],
- endpoints['3'].shape.as_list())
- self.assertAllEqual(
- [1, input_size / 2**4, input_size / 2**4, 256 * endpoint_filter_scale],
- endpoints['4'].shape.as_list())
- self.assertAllEqual(
- [1, input_size / 2**5, input_size / 2**5, 512 * endpoint_filter_scale],
- endpoints['5'].shape.as_list())
-
- @combinations.generate(
- combinations.combine(
- strategy=[
- strategy_combinations.cloud_tpu_strategy,
- strategy_combinations.one_device_strategy_gpu,
- ],
- use_sync_bn=[False, True],
- ))
- def test_sync_bn_multiple_devices(self, strategy, use_sync_bn):
- """Test for sync bn on TPU and GPU devices."""
- inputs = np.random.rand(64, 128, 128, 3)
-
- tf.keras.backend.set_image_data_format('channels_last')
-
- with strategy.scope():
- network = resnet.ResNet(model_id=50, use_sync_bn=use_sync_bn)
- _ = network(inputs)
-
- @parameterized.parameters(
- (128, 34, 1, 'v0', None, 0.0, 1.0, False, False),
- (128, 34, 1, 'v1', 0.25, 0.2, 1.25, True, True),
- (128, 50, 4, 'v0', None, 0.0, 1.5, False, False),
- (128, 50, 4, 'v1', 0.25, 0.2, 2.0, True, True),
- )
- def test_resnet_rs(self, input_size, model_id, endpoint_filter_scale,
- stem_type, se_ratio, init_stochastic_depth_rate,
- depth_multiplier, resnetd_shortcut, replace_stem_max_pool):
- """Test creation of ResNet family models."""
- tf.keras.backend.set_image_data_format('channels_last')
- network = resnet.ResNet(
- model_id=model_id,
- depth_multiplier=depth_multiplier,
- stem_type=stem_type,
- resnetd_shortcut=resnetd_shortcut,
- replace_stem_max_pool=replace_stem_max_pool,
- se_ratio=se_ratio,
- init_stochastic_depth_rate=init_stochastic_depth_rate)
- inputs = tf.keras.Input(shape=(input_size, input_size, 3), batch_size=1)
- _ = network(inputs)
-
- @parameterized.parameters(1, 3, 4)
- def test_input_specs(self, input_dim):
- """Test different input feature dimensions."""
- tf.keras.backend.set_image_data_format('channels_last')
-
- input_specs = tf.keras.layers.InputSpec(shape=[None, None, None, input_dim])
- network = resnet.ResNet(model_id=50, input_specs=input_specs)
-
- inputs = tf.keras.Input(shape=(128, 128, input_dim), batch_size=1)
- _ = network(inputs)
-
- def test_serialize_deserialize(self):
- # Create a network object that sets all of its config options.
- kwargs = dict(
- model_id=50,
- depth_multiplier=1.0,
- stem_type='v0',
- se_ratio=None,
- resnetd_shortcut=False,
- replace_stem_max_pool=False,
- init_stochastic_depth_rate=0.0,
- scale_stem=True,
- use_sync_bn=False,
- activation='relu',
- norm_momentum=0.99,
- norm_epsilon=0.001,
- kernel_initializer='VarianceScaling',
- kernel_regularizer=None,
- bias_regularizer=None,
- bn_trainable=True)
- network = resnet.ResNet(**kwargs)
-
- expected_config = dict(kwargs)
- self.assertEqual(network.get_config(), expected_config)
-
- # Create another network object from the first object's config.
- new_network = resnet.ResNet.from_config(network.get_config())
-
- # Validate that the config can be forced to JSON.
- _ = new_network.to_json()
-
- # If the serialization was successful, the new config should match the old.
- self.assertAllEqual(network.get_config(), new_network.get_config())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/backbones/revnet.py b/official/vision/beta/modeling/backbones/revnet.py
deleted file mode 100644
index 3e071bafc1c68c43aee4ff033e8a102f39f44de6..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/revnet.py
+++ /dev/null
@@ -1,233 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Contains definitions of RevNet."""
-
-from typing import Any, Callable, Dict, Optional
-# Import libraries
-import tensorflow as tf
-from official.modeling import hyperparams
-from official.modeling import tf_utils
-from official.vision.beta.modeling.backbones import factory
-from official.vision.beta.modeling.layers import nn_blocks
-
-
-# Specifications for different RevNet variants.
-# Each entry specifies block configurations of the particular RevNet variant.
-# Each element in the block configuration is in the following format:
-# (block_fn, num_filters, block_repeats)
-REVNET_SPECS = {
- 38: [
- ('residual', 32, 3),
- ('residual', 64, 3),
- ('residual', 112, 3),
- ],
- 56: [
- ('bottleneck', 128, 2),
- ('bottleneck', 256, 2),
- ('bottleneck', 512, 3),
- ('bottleneck', 832, 2),
- ],
- 104: [
- ('bottleneck', 128, 2),
- ('bottleneck', 256, 2),
- ('bottleneck', 512, 11),
- ('bottleneck', 832, 2),
- ],
-}
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class RevNet(tf.keras.Model):
- """Creates a Reversible ResNet (RevNet) family model.
-
- This implements:
- Aidan N. Gomez, Mengye Ren, Raquel Urtasun, Roger B. Grosse.
- The Reversible Residual Network: Backpropagation Without Storing
- Activations.
- (https://arxiv.org/pdf/1707.04585.pdf)
- """
-
- def __init__(
- self,
- model_id: int,
- input_specs: tf.keras.layers.InputSpec = tf.keras.layers.InputSpec(
- shape=[None, None, None, 3]),
- activation: str = 'relu',
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- kernel_initializer: str = 'VarianceScaling',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- **kwargs):
- """Initializes a RevNet model.
-
- Args:
- model_id: An `int` of depth/id of ResNet backbone model.
- input_specs: A `tf.keras.layers.InputSpec` of the input tensor.
- activation: A `str` name of the activation function.
- use_sync_bn: If True, use synchronized batch normalization.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- kernel_initializer: A str for kernel initializer of convolutional layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default to None.
- **kwargs: Additional keyword arguments to be passed.
- """
- self._model_id = model_id
- self._input_specs = input_specs
- self._use_sync_bn = use_sync_bn
- self._activation = activation
- self._norm_momentum = norm_momentum
- self._norm_epsilon = norm_epsilon
- self._kernel_initializer = kernel_initializer
- self._kernel_regularizer = kernel_regularizer
- if use_sync_bn:
- self._norm = tf.keras.layers.experimental.SyncBatchNormalization
- else:
- self._norm = tf.keras.layers.BatchNormalization
-
- axis = -1 if tf.keras.backend.image_data_format() == 'channels_last' else 1
-
- # Build RevNet.
- inputs = tf.keras.Input(shape=input_specs.shape[1:])
-
- x = tf.keras.layers.Conv2D(
- filters=REVNET_SPECS[model_id][0][1],
- kernel_size=7, strides=2, use_bias=False, padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer)(inputs)
- x = self._norm(
- axis=axis, momentum=norm_momentum, epsilon=norm_epsilon)(x)
- x = tf_utils.get_activation(activation)(x)
- x = tf.keras.layers.MaxPool2D(pool_size=3, strides=2, padding='same')(x)
-
- endpoints = {}
- for i, spec in enumerate(REVNET_SPECS[model_id]):
- if spec[0] == 'residual':
- inner_block_fn = nn_blocks.ResidualInner
- elif spec[0] == 'bottleneck':
- inner_block_fn = nn_blocks.BottleneckResidualInner
- else:
- raise ValueError('Block fn `{}` is not supported.'.format(spec[0]))
-
- if spec[1] % 2 != 0:
- raise ValueError('Number of output filters must be even to ensure '
- 'splitting in channel dimension for reversible blocks')
-
- x = self._block_group(
- inputs=x,
- filters=spec[1],
- strides=(1 if i == 0 else 2),
- inner_block_fn=inner_block_fn,
- block_repeats=spec[2],
- batch_norm_first=(i != 0), # Only skip on first block
- name='revblock_group_{}'.format(i + 2))
- endpoints[str(i + 2)] = x
-
- self._output_specs = {l: endpoints[l].get_shape() for l in endpoints}
-
- super(RevNet, self).__init__(inputs=inputs, outputs=endpoints, **kwargs)
-
- def _block_group(self,
- inputs: tf.Tensor,
- filters: int,
- strides: int,
- inner_block_fn: Callable[..., tf.keras.layers.Layer],
- block_repeats: int,
- batch_norm_first: bool,
- name: str = 'revblock_group') -> tf.Tensor:
- """Creates one reversible block for RevNet model.
-
- Args:
- inputs: A `tf.Tensor` of size `[batch, channels, height, width]`.
- filters: An `int` number of filters for the first convolution of the
- layer.
- strides: An `int` stride to use for the first convolution of the layer. If
- greater than 1, this block group will downsample the input.
- inner_block_fn: Either `nn_blocks.ResidualInner` or
- `nn_blocks.BottleneckResidualInner`.
- block_repeats: An `int` number of blocks contained in this block group.
- batch_norm_first: A `bool` that specifies whether to apply
- BatchNormalization and activation layer before feeding into convolution
- layers.
- name: A `str` name for the block.
-
- Returns:
- The output `tf.Tensor` of the block layer.
- """
- x = inputs
- for i in range(block_repeats):
- is_first_block = i == 0
- # Only first residual layer in block gets downsampled
- curr_strides = strides if is_first_block else 1
- f = inner_block_fn(
- filters=filters // 2,
- strides=curr_strides,
- batch_norm_first=batch_norm_first and is_first_block,
- kernel_regularizer=self._kernel_regularizer)
- g = inner_block_fn(
- filters=filters // 2,
- strides=1,
- batch_norm_first=batch_norm_first and is_first_block,
- kernel_regularizer=self._kernel_regularizer)
- x = nn_blocks.ReversibleLayer(f, g)(x)
-
- return tf.identity(x, name=name)
-
- def get_config(self) -> Dict[str, Any]:
- config_dict = {
- 'model_id': self._model_id,
- 'activation': self._activation,
- 'use_sync_bn': self._use_sync_bn,
- 'norm_momentum': self._norm_momentum,
- 'norm_epsilon': self._norm_epsilon,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- }
- return config_dict
-
- @classmethod
- def from_config(cls,
- config: Dict[str, Any],
- custom_objects: Optional[Any] = None) -> tf.keras.Model:
- return cls(**config)
-
- @property
- def output_specs(self) -> Dict[int, tf.TensorShape]:
- """A dict of {level: TensorShape} pairs for the model output."""
- return self._output_specs
-
-
-@factory.register_backbone_builder('revnet')
-def build_revnet(
- input_specs: tf.keras.layers.InputSpec,
- backbone_config: hyperparams.Config,
- norm_activation_config: hyperparams.Config,
- l2_regularizer: tf.keras.regularizers.Regularizer = None) -> tf.keras.Model: # pytype: disable=annotation-type-mismatch # typed-keras
- """Builds RevNet backbone from a config."""
- backbone_type = backbone_config.type
- backbone_cfg = backbone_config.get()
- assert backbone_type == 'revnet', (f'Inconsistent backbone type '
- f'{backbone_type}')
-
- return RevNet(
- model_id=backbone_cfg.model_id,
- input_specs=input_specs,
- activation=norm_activation_config.activation,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon,
- kernel_regularizer=l2_regularizer)
diff --git a/official/vision/beta/modeling/backbones/revnet_test.py b/official/vision/beta/modeling/backbones/revnet_test.py
deleted file mode 100644
index c436b68484ba7af9e2cd5ea1c8b835b83b46a5d0..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/revnet_test.py
+++ /dev/null
@@ -1,92 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for RevNet."""
-
-# Import libraries
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.vision.beta.modeling.backbones import revnet
-
-
-class RevNetTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (128, 56, 4),
- (128, 104, 4),
- )
- def test_network_creation(self, input_size, model_id,
- endpoint_filter_scale):
- """Test creation of RevNet family models."""
- tf.keras.backend.set_image_data_format('channels_last')
-
- network = revnet.RevNet(model_id=model_id)
- inputs = tf.keras.Input(shape=(input_size, input_size, 3), batch_size=1)
- endpoints = network(inputs)
- network.summary()
-
- self.assertAllEqual(
- [1, input_size / 2**2, input_size / 2**2, 128 * endpoint_filter_scale],
- endpoints['2'].shape.as_list())
- self.assertAllEqual(
- [1, input_size / 2**3, input_size / 2**3, 256 * endpoint_filter_scale],
- endpoints['3'].shape.as_list())
- self.assertAllEqual(
- [1, input_size / 2**4, input_size / 2**4, 512 * endpoint_filter_scale],
- endpoints['4'].shape.as_list())
- self.assertAllEqual(
- [1, input_size / 2**5, input_size / 2**5, 832 * endpoint_filter_scale],
- endpoints['5'].shape.as_list())
-
- @parameterized.parameters(1, 3, 4)
- def test_input_specs(self, input_dim):
- """Test different input feature dimensions."""
- tf.keras.backend.set_image_data_format('channels_last')
-
- input_specs = tf.keras.layers.InputSpec(shape=[None, None, None, input_dim])
- network = revnet.RevNet(model_id=56, input_specs=input_specs)
-
- inputs = tf.keras.Input(shape=(128, 128, input_dim), batch_size=1)
- _ = network(inputs)
-
- def test_serialize_deserialize(self):
- # Create a network object that sets all of its config options.
- kwargs = dict(
- model_id=56,
- activation='relu',
- use_sync_bn=False,
- norm_momentum=0.99,
- norm_epsilon=0.001,
- kernel_initializer='VarianceScaling',
- kernel_regularizer=None,
- )
- network = revnet.RevNet(**kwargs)
-
- expected_config = dict(kwargs)
- self.assertEqual(network.get_config(), expected_config)
-
- # Create another network object from the first object's config.
- new_network = revnet.RevNet.from_config(network.get_config())
-
- # Validate that the config can be forced to JSON.
- _ = new_network.to_json()
-
- # If the serialization was successful, the new config should match the old.
- self.assertAllEqual(network.get_config(), new_network.get_config())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/backbones/spinenet.py b/official/vision/beta/modeling/backbones/spinenet.py
deleted file mode 100644
index c381edde7827f6f5c8a8619185a08f59ac90cd32..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/spinenet.py
+++ /dev/null
@@ -1,572 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains definitions of SpineNet Networks."""
-
-import math
-from typing import Any, List, Optional, Tuple
-
-# Import libraries
-
-from absl import logging
-import tensorflow as tf
-
-from official.modeling import hyperparams
-from official.modeling import tf_utils
-from official.vision.beta.modeling.backbones import factory
-from official.vision.beta.modeling.layers import nn_blocks
-from official.vision.beta.modeling.layers import nn_layers
-from official.vision.beta.ops import spatial_transform_ops
-
-layers = tf.keras.layers
-
-FILTER_SIZE_MAP = {
- 1: 32,
- 2: 64,
- 3: 128,
- 4: 256,
- 5: 256,
- 6: 256,
- 7: 256,
-}
-
-# The fixed SpineNet architecture discovered by NAS.
-# Each element represents a specification of a building block:
-# (block_level, block_fn, (input_offset0, input_offset1), is_output).
-SPINENET_BLOCK_SPECS = [
- (2, 'bottleneck', (0, 1), False),
- (4, 'residual', (0, 1), False),
- (3, 'bottleneck', (2, 3), False),
- (4, 'bottleneck', (2, 4), False),
- (6, 'residual', (3, 5), False),
- (4, 'bottleneck', (3, 5), False),
- (5, 'residual', (6, 7), False),
- (7, 'residual', (6, 8), False),
- (5, 'bottleneck', (8, 9), False),
- (5, 'bottleneck', (8, 10), False),
- (4, 'bottleneck', (5, 10), True),
- (3, 'bottleneck', (4, 10), True),
- (5, 'bottleneck', (7, 12), True),
- (7, 'bottleneck', (5, 14), True),
- (6, 'bottleneck', (12, 14), True),
- (2, 'bottleneck', (2, 13), True),
-]
-
-SCALING_MAP = {
- '49S': {
- 'endpoints_num_filters': 128,
- 'filter_size_scale': 0.65,
- 'resample_alpha': 0.5,
- 'block_repeats': 1,
- },
- '49': {
- 'endpoints_num_filters': 256,
- 'filter_size_scale': 1.0,
- 'resample_alpha': 0.5,
- 'block_repeats': 1,
- },
- '96': {
- 'endpoints_num_filters': 256,
- 'filter_size_scale': 1.0,
- 'resample_alpha': 0.5,
- 'block_repeats': 2,
- },
- '143': {
- 'endpoints_num_filters': 256,
- 'filter_size_scale': 1.0,
- 'resample_alpha': 1.0,
- 'block_repeats': 3,
- },
- # SpineNet-143 with 1.3x filter_size_scale.
- '143L': {
- 'endpoints_num_filters': 256,
- 'filter_size_scale': 1.3,
- 'resample_alpha': 1.0,
- 'block_repeats': 3,
- },
- '190': {
- 'endpoints_num_filters': 512,
- 'filter_size_scale': 1.3,
- 'resample_alpha': 1.0,
- 'block_repeats': 4,
- },
-}
-
-
-class BlockSpec(object):
- """A container class that specifies the block configuration for SpineNet."""
-
- def __init__(self, level: int, block_fn: str, input_offsets: Tuple[int, int],
- is_output: bool):
- self.level = level
- self.block_fn = block_fn
- self.input_offsets = input_offsets
- self.is_output = is_output
-
-
-def build_block_specs(
- block_specs: Optional[List[Tuple[Any, ...]]] = None) -> List[BlockSpec]:
- """Builds the list of BlockSpec objects for SpineNet."""
- if not block_specs:
- block_specs = SPINENET_BLOCK_SPECS
- logging.info('Building SpineNet block specs: %s', block_specs)
- return [BlockSpec(*b) for b in block_specs]
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class SpineNet(tf.keras.Model):
- """Creates a SpineNet family model.
-
- This implements:
- Xianzhi Du, Tsung-Yi Lin, Pengchong Jin, Golnaz Ghiasi, Mingxing Tan,
- Yin Cui, Quoc V. Le, Xiaodan Song.
- SpineNet: Learning Scale-Permuted Backbone for Recognition and Localization.
- (https://arxiv.org/abs/1912.05027)
- """
-
- def __init__(
- self,
- input_specs: tf.keras.layers.InputSpec = tf.keras.layers.InputSpec(
- shape=[None, None, None, 3]),
- min_level: int = 3,
- max_level: int = 7,
- block_specs: List[BlockSpec] = build_block_specs(),
- endpoints_num_filters: int = 256,
- resample_alpha: float = 0.5,
- block_repeats: int = 1,
- filter_size_scale: float = 1.0,
- init_stochastic_depth_rate: float = 0.0,
- kernel_initializer: str = 'VarianceScaling',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- activation: str = 'relu',
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- **kwargs):
- """Initializes a SpineNet model.
-
- Args:
- input_specs: A `tf.keras.layers.InputSpec` of the input tensor.
- min_level: An `int` of min level for output mutiscale features.
- max_level: An `int` of max level for output mutiscale features.
- block_specs: A list of block specifications for the SpineNet model
- discovered by NAS.
- endpoints_num_filters: An `int` of feature dimension for the output
- endpoints.
- resample_alpha: A `float` of resampling factor in cross-scale connections.
- block_repeats: An `int` of number of blocks contained in the layer.
- filter_size_scale: A `float` of multiplier for the filters (number of
- channels) for all convolution ops. The value must be greater than zero.
- Typical usage will be to set this value in (0, 1) to reduce the number
- of parameters or computation cost of the model.
- init_stochastic_depth_rate: A `float` of initial stochastic depth rate.
- kernel_initializer: A str for kernel initializer of convolutional layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default to None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2D.
- Default to None.
- activation: A `str` name of the activation function.
- use_sync_bn: If True, use synchronized batch normalization.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A small `float` added to variance to avoid dividing by zero.
- **kwargs: Additional keyword arguments to be passed.
- """
- self._input_specs = input_specs
- self._min_level = min_level
- self._max_level = max_level
- self._block_specs = block_specs
- self._endpoints_num_filters = endpoints_num_filters
- self._resample_alpha = resample_alpha
- self._block_repeats = block_repeats
- self._filter_size_scale = filter_size_scale
- self._init_stochastic_depth_rate = init_stochastic_depth_rate
- self._kernel_initializer = kernel_initializer
- self._kernel_regularizer = kernel_regularizer
- self._bias_regularizer = bias_regularizer
- self._activation = activation
- self._use_sync_bn = use_sync_bn
- self._norm_momentum = norm_momentum
- self._norm_epsilon = norm_epsilon
- if activation == 'relu':
- self._activation_fn = tf.nn.relu
- elif activation == 'swish':
- self._activation_fn = tf.nn.swish
- else:
- raise ValueError('Activation {} not implemented.'.format(activation))
- self._init_block_fn = 'bottleneck'
- self._num_init_blocks = 2
-
- if use_sync_bn:
- self._norm = layers.experimental.SyncBatchNormalization
- else:
- self._norm = layers.BatchNormalization
-
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._bn_axis = -1
- else:
- self._bn_axis = 1
-
- # Build SpineNet.
- inputs = tf.keras.Input(shape=input_specs.shape[1:])
-
- net = self._build_stem(inputs=inputs)
- input_width = input_specs.shape[2]
- if input_width is None:
- max_stride = max(map(lambda b: b.level, block_specs))
- input_width = 2 ** max_stride
- net = self._build_scale_permuted_network(net=net, input_width=input_width)
- endpoints = self._build_endpoints(net=net)
-
- self._output_specs = {l: endpoints[l].get_shape() for l in endpoints}
- super(SpineNet, self).__init__(inputs=inputs, outputs=endpoints)
-
- def _block_group(self,
- inputs: tf.Tensor,
- filters: int,
- strides: int,
- block_fn_cand: str,
- block_repeats: int = 1,
- stochastic_depth_drop_rate: Optional[float] = None,
- name: str = 'block_group'):
- """Creates one group of blocks for the SpineNet model."""
- block_fn_candidates = {
- 'bottleneck': nn_blocks.BottleneckBlock,
- 'residual': nn_blocks.ResidualBlock,
- }
- block_fn = block_fn_candidates[block_fn_cand]
- _, _, _, num_filters = inputs.get_shape().as_list()
-
- if block_fn_cand == 'bottleneck':
- use_projection = not (num_filters == (filters * 4) and strides == 1)
- else:
- use_projection = not (num_filters == filters and strides == 1)
-
- x = block_fn(
- filters=filters,
- strides=strides,
- use_projection=use_projection,
- stochastic_depth_drop_rate=stochastic_depth_drop_rate,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer,
- activation=self._activation,
- use_sync_bn=self._use_sync_bn,
- norm_momentum=self._norm_momentum,
- norm_epsilon=self._norm_epsilon)(
- inputs)
- for _ in range(1, block_repeats):
- x = block_fn(
- filters=filters,
- strides=1,
- use_projection=False,
- stochastic_depth_drop_rate=stochastic_depth_drop_rate,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer,
- activation=self._activation,
- use_sync_bn=self._use_sync_bn,
- norm_momentum=self._norm_momentum,
- norm_epsilon=self._norm_epsilon)(
- x)
- return tf.identity(x, name=name)
-
- def _build_stem(self, inputs):
- """Builds SpineNet stem."""
- x = layers.Conv2D(
- filters=64,
- kernel_size=7,
- strides=2,
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- inputs)
- x = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)(
- x)
- x = tf_utils.get_activation(self._activation_fn)(x)
- x = layers.MaxPool2D(pool_size=3, strides=2, padding='same')(x)
-
- net = []
- # Build the initial level 2 blocks.
- for i in range(self._num_init_blocks):
- x = self._block_group(
- inputs=x,
- filters=int(FILTER_SIZE_MAP[2] * self._filter_size_scale),
- strides=1,
- block_fn_cand=self._init_block_fn,
- block_repeats=self._block_repeats,
- name='stem_block_{}'.format(i + 1))
- net.append(x)
- return net
-
- def _build_scale_permuted_network(self,
- net,
- input_width,
- weighted_fusion=False):
- """Builds scale-permuted network."""
- net_sizes = [int(math.ceil(input_width / 2**2))] * len(net)
- net_block_fns = [self._init_block_fn] * len(net)
- num_outgoing_connections = [0] * len(net)
-
- endpoints = {}
- for i, block_spec in enumerate(self._block_specs):
- # Find out specs for the target block.
- target_width = int(math.ceil(input_width / 2**block_spec.level))
- target_num_filters = int(FILTER_SIZE_MAP[block_spec.level] *
- self._filter_size_scale)
- target_block_fn = block_spec.block_fn
-
- # Resample then merge input0 and input1.
- parents = []
- input0 = block_spec.input_offsets[0]
- input1 = block_spec.input_offsets[1]
-
- x0 = self._resample_with_alpha(
- inputs=net[input0],
- input_width=net_sizes[input0],
- input_block_fn=net_block_fns[input0],
- target_width=target_width,
- target_num_filters=target_num_filters,
- target_block_fn=target_block_fn,
- alpha=self._resample_alpha)
- parents.append(x0)
- num_outgoing_connections[input0] += 1
-
- x1 = self._resample_with_alpha(
- inputs=net[input1],
- input_width=net_sizes[input1],
- input_block_fn=net_block_fns[input1],
- target_width=target_width,
- target_num_filters=target_num_filters,
- target_block_fn=target_block_fn,
- alpha=self._resample_alpha)
- parents.append(x1)
- num_outgoing_connections[input1] += 1
-
- # Merge 0 outdegree blocks to the output block.
- if block_spec.is_output:
- for j, (j_feat,
- j_connections) in enumerate(zip(net, num_outgoing_connections)):
- if j_connections == 0 and (j_feat.shape[2] == target_width and
- j_feat.shape[3] == x0.shape[3]):
- parents.append(j_feat)
- num_outgoing_connections[j] += 1
-
- # pylint: disable=g-direct-tensorflow-import
- if weighted_fusion:
- dtype = parents[0].dtype
- parent_weights = [
- tf.nn.relu(tf.cast(tf.Variable(1.0, name='block{}_fusion{}'.format(
- i, j)), dtype=dtype)) for j in range(len(parents))]
- weights_sum = tf.add_n(parent_weights)
- parents = [
- parents[i] * parent_weights[i] / (weights_sum + 0.0001)
- for i in range(len(parents))
- ]
-
- # Fuse all parent nodes then build a new block.
- x = tf_utils.get_activation(self._activation_fn)(tf.add_n(parents))
- x = self._block_group(
- inputs=x,
- filters=target_num_filters,
- strides=1,
- block_fn_cand=target_block_fn,
- block_repeats=self._block_repeats,
- stochastic_depth_drop_rate=nn_layers.get_stochastic_depth_rate(
- self._init_stochastic_depth_rate, i + 1, len(self._block_specs)),
- name='scale_permuted_block_{}'.format(i + 1))
-
- net.append(x)
- net_sizes.append(target_width)
- net_block_fns.append(target_block_fn)
- num_outgoing_connections.append(0)
-
- # Save output feats.
- if block_spec.is_output:
- if block_spec.level in endpoints:
- raise ValueError('Duplicate feats found for output level {}.'.format(
- block_spec.level))
- if (block_spec.level < self._min_level or
- block_spec.level > self._max_level):
- logging.warning(
- 'SpineNet output level %s out of range [min_level, max_level] = '
- '[%s, %s] will not be used for further processing.',
- block_spec.level, self._min_level, self._max_level)
- endpoints[str(block_spec.level)] = x
-
- return endpoints
-
- def _build_endpoints(self, net):
- """Matches filter size for endpoints before sharing conv layers."""
- endpoints = {}
- for level in range(self._min_level, self._max_level + 1):
- x = layers.Conv2D(
- filters=self._endpoints_num_filters,
- kernel_size=1,
- strides=1,
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- net[str(level)])
- x = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)(
- x)
- x = tf_utils.get_activation(self._activation_fn)(x)
- endpoints[str(level)] = x
- return endpoints
-
- def _resample_with_alpha(self,
- inputs,
- input_width,
- input_block_fn,
- target_width,
- target_num_filters,
- target_block_fn,
- alpha=0.5):
- """Matches resolution and feature dimension."""
- _, _, _, input_num_filters = inputs.get_shape().as_list()
- if input_block_fn == 'bottleneck':
- input_num_filters /= 4
- new_num_filters = int(input_num_filters * alpha)
-
- x = layers.Conv2D(
- filters=new_num_filters,
- kernel_size=1,
- strides=1,
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- inputs)
- x = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)(
- x)
- x = tf_utils.get_activation(self._activation_fn)(x)
-
- # Spatial resampling.
- if input_width > target_width:
- x = layers.Conv2D(
- filters=new_num_filters,
- kernel_size=3,
- strides=2,
- padding='SAME',
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- x)
- x = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)(
- x)
- x = tf_utils.get_activation(self._activation_fn)(x)
- input_width /= 2
- while input_width > target_width:
- x = layers.MaxPool2D(pool_size=3, strides=2, padding='SAME')(x)
- input_width /= 2
- elif input_width < target_width:
- scale = target_width // input_width
- x = spatial_transform_ops.nearest_upsampling(x, scale=scale)
-
- # Last 1x1 conv to match filter size.
- if target_block_fn == 'bottleneck':
- target_num_filters *= 4
- x = layers.Conv2D(
- filters=target_num_filters,
- kernel_size=1,
- strides=1,
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- x)
- x = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)(
- x)
- return x
-
- def get_config(self):
- config_dict = {
- 'min_level': self._min_level,
- 'max_level': self._max_level,
- 'endpoints_num_filters': self._endpoints_num_filters,
- 'resample_alpha': self._resample_alpha,
- 'block_repeats': self._block_repeats,
- 'filter_size_scale': self._filter_size_scale,
- 'init_stochastic_depth_rate': self._init_stochastic_depth_rate,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- 'bias_regularizer': self._bias_regularizer,
- 'activation': self._activation,
- 'use_sync_bn': self._use_sync_bn,
- 'norm_momentum': self._norm_momentum,
- 'norm_epsilon': self._norm_epsilon
- }
- return config_dict
-
- @classmethod
- def from_config(cls, config, custom_objects=None):
- return cls(**config)
-
- @property
- def output_specs(self):
- """A dict of {level: TensorShape} pairs for the model output."""
- return self._output_specs
-
-
-@factory.register_backbone_builder('spinenet')
-def build_spinenet(
- input_specs: tf.keras.layers.InputSpec,
- backbone_config: hyperparams.Config,
- norm_activation_config: hyperparams.Config,
- l2_regularizer: tf.keras.regularizers.Regularizer = None) -> tf.keras.Model:
- """Builds SpineNet backbone from a config."""
- backbone_type = backbone_config.type
- backbone_cfg = backbone_config.get()
- assert backbone_type == 'spinenet', (f'Inconsistent backbone type '
- f'{backbone_type}')
-
- model_id = backbone_cfg.model_id
- if model_id not in SCALING_MAP:
- raise ValueError(
- 'SpineNet-{} is not a valid architecture.'.format(model_id))
- scaling_params = SCALING_MAP[model_id]
-
- return SpineNet(
- input_specs=input_specs,
- min_level=backbone_cfg.min_level,
- max_level=backbone_cfg.max_level,
- endpoints_num_filters=scaling_params['endpoints_num_filters'],
- resample_alpha=scaling_params['resample_alpha'],
- block_repeats=scaling_params['block_repeats'],
- filter_size_scale=scaling_params['filter_size_scale'],
- init_stochastic_depth_rate=backbone_cfg.stochastic_depth_drop_rate,
- kernel_regularizer=l2_regularizer,
- activation=norm_activation_config.activation,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon)
diff --git a/official/vision/beta/modeling/backbones/spinenet_mobile.py b/official/vision/beta/modeling/backbones/spinenet_mobile.py
deleted file mode 100644
index 302998f6df45f567c65410d9e15f8610e8c74331..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/spinenet_mobile.py
+++ /dev/null
@@ -1,539 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-# Copyright 2020 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-# ==============================================================================
-"""Contains definitions of Mobile SpineNet Networks."""
-import math
-from typing import Any, List, Optional, Tuple
-
-# Import libraries
-
-from absl import logging
-import tensorflow as tf
-
-from official.modeling import hyperparams
-from official.modeling import tf_utils
-from official.vision.beta.modeling.backbones import factory
-from official.vision.beta.modeling.layers import nn_blocks
-from official.vision.beta.modeling.layers import nn_layers
-from official.vision.beta.ops import spatial_transform_ops
-
-layers = tf.keras.layers
-
-FILTER_SIZE_MAP = {
- 0: 8,
- 1: 16,
- 2: 24,
- 3: 40,
- 4: 80,
- 5: 112,
- 6: 112,
- 7: 112,
-}
-
-# The fixed SpineNet architecture discovered by NAS.
-# Each element represents a specification of a building block:
-# (block_level, block_fn, (input_offset0, input_offset1), is_output).
-SPINENET_BLOCK_SPECS = [
- (2, 'mbconv', (0, 1), False),
- (2, 'mbconv', (1, 2), False),
- (4, 'mbconv', (1, 2), False),
- (3, 'mbconv', (3, 4), False),
- (4, 'mbconv', (3, 5), False),
- (6, 'mbconv', (4, 6), False),
- (4, 'mbconv', (4, 6), False),
- (5, 'mbconv', (7, 8), False),
- (7, 'mbconv', (7, 9), False),
- (5, 'mbconv', (9, 10), False),
- (5, 'mbconv', (9, 11), False),
- (4, 'mbconv', (6, 11), True),
- (3, 'mbconv', (5, 11), True),
- (5, 'mbconv', (8, 13), True),
- (7, 'mbconv', (6, 15), True),
- (6, 'mbconv', (13, 15), True),
-]
-
-SCALING_MAP = {
- '49': {
- 'endpoints_num_filters': 48,
- 'filter_size_scale': 1.0,
- 'block_repeats': 1,
- },
- '49S': {
- 'endpoints_num_filters': 40,
- 'filter_size_scale': 0.65,
- 'block_repeats': 1,
- },
- '49XS': {
- 'endpoints_num_filters': 24,
- 'filter_size_scale': 0.6,
- 'block_repeats': 1,
- },
-}
-
-
-class BlockSpec(object):
- """A container class that specifies the block configuration for SpineNet."""
-
- def __init__(self, level: int, block_fn: str, input_offsets: Tuple[int, int],
- is_output: bool):
- self.level = level
- self.block_fn = block_fn
- self.input_offsets = input_offsets
- self.is_output = is_output
-
-
-def build_block_specs(
- block_specs: Optional[List[Tuple[Any, ...]]] = None) -> List[BlockSpec]:
- """Builds the list of BlockSpec objects for SpineNet."""
- if not block_specs:
- block_specs = SPINENET_BLOCK_SPECS
- logging.info('Building SpineNet block specs: %s', block_specs)
- return [BlockSpec(*b) for b in block_specs]
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class SpineNetMobile(tf.keras.Model):
- """Creates a Mobile SpineNet family model.
-
- This implements:
- [1] Xianzhi Du, Tsung-Yi Lin, Pengchong Jin, Golnaz Ghiasi, Mingxing Tan,
- Yin Cui, Quoc V. Le, Xiaodan Song.
- SpineNet: Learning Scale-Permuted Backbone for Recognition and Localization.
- (https://arxiv.org/abs/1912.05027).
- [2] Xianzhi Du, Tsung-Yi Lin, Pengchong Jin, Yin Cui, Mingxing Tan,
- Quoc Le, Xiaodan Song.
- Efficient Scale-Permuted Backbone with Learned Resource Distribution.
- (https://arxiv.org/abs/2010.11426).
- """
-
- def __init__(
- self,
- input_specs: tf.keras.layers.InputSpec = tf.keras.layers.InputSpec(
- shape=[None, None, None, 3]),
- min_level: int = 3,
- max_level: int = 7,
- block_specs: List[BlockSpec] = build_block_specs(),
- endpoints_num_filters: int = 256,
- se_ratio: float = 0.2,
- block_repeats: int = 1,
- filter_size_scale: float = 1.0,
- expand_ratio: int = 6,
- init_stochastic_depth_rate=0.0,
- kernel_initializer: str = 'VarianceScaling',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- activation: str = 'relu',
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- use_keras_upsampling_2d: bool = False,
- **kwargs):
- """Initializes a Mobile SpineNet model.
-
- Args:
- input_specs: A `tf.keras.layers.InputSpec` of the input tensor.
- min_level: An `int` of min level for output mutiscale features.
- max_level: An `int` of max level for output mutiscale features.
- block_specs: The block specifications for the SpineNet model discovered by
- NAS.
- endpoints_num_filters: An `int` of feature dimension for the output
- endpoints.
- se_ratio: A `float` of Squeeze-and-Excitation ratio.
- block_repeats: An `int` of number of blocks contained in the layer.
- filter_size_scale: A `float` of multiplier for the filters (number of
- channels) for all convolution ops. The value must be greater than zero.
- Typical usage will be to set this value in (0, 1) to reduce the number
- of parameters or computation cost of the model.
- expand_ratio: An `integer` of expansion ratios for inverted bottleneck
- blocks.
- init_stochastic_depth_rate: A `float` of initial stochastic depth rate.
- kernel_initializer: A str for kernel initializer of convolutional layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default to None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2D.
- Default to None.
- activation: A `str` name of the activation function.
- use_sync_bn: If True, use synchronized batch normalization.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A small `float` added to variance to avoid dividing by zero.
- use_keras_upsampling_2d: If True, use keras UpSampling2D layer.
- **kwargs: Additional keyword arguments to be passed.
- """
- self._input_specs = input_specs
- self._min_level = min_level
- self._max_level = max_level
- self._block_specs = block_specs
- self._endpoints_num_filters = endpoints_num_filters
- self._se_ratio = se_ratio
- self._block_repeats = block_repeats
- self._filter_size_scale = filter_size_scale
- self._expand_ratio = expand_ratio
- self._init_stochastic_depth_rate = init_stochastic_depth_rate
- self._kernel_initializer = kernel_initializer
- self._kernel_regularizer = kernel_regularizer
- self._bias_regularizer = bias_regularizer
- self._activation = activation
- self._use_sync_bn = use_sync_bn
- self._norm_momentum = norm_momentum
- self._norm_epsilon = norm_epsilon
- self._use_keras_upsampling_2d = use_keras_upsampling_2d
- self._num_init_blocks = 2
-
- if use_sync_bn:
- self._norm = layers.experimental.SyncBatchNormalization
- else:
- self._norm = layers.BatchNormalization
-
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._bn_axis = -1
- else:
- self._bn_axis = 1
-
- # Build SpineNet.
- inputs = tf.keras.Input(shape=input_specs.shape[1:])
-
- net = self._build_stem(inputs=inputs)
- input_width = input_specs.shape[2]
- if input_width is None:
- max_stride = max(map(lambda b: b.level, block_specs))
- input_width = 2 ** max_stride
- net = self._build_scale_permuted_network(net=net, input_width=input_width)
- endpoints = self._build_endpoints(net=net)
-
- self._output_specs = {l: endpoints[l].get_shape() for l in endpoints}
- super().__init__(inputs=inputs, outputs=endpoints)
-
- def _block_group(self,
- inputs: tf.Tensor,
- in_filters: int,
- out_filters: int,
- strides: int,
- expand_ratio: int = 6,
- block_repeats: int = 1,
- se_ratio: float = 0.2,
- stochastic_depth_drop_rate: Optional[float] = None,
- name: str = 'block_group'):
- """Creates one group of blocks for the SpineNet model."""
- x = nn_blocks.InvertedBottleneckBlock(
- in_filters=in_filters,
- out_filters=out_filters,
- strides=strides,
- se_ratio=se_ratio,
- expand_ratio=expand_ratio,
- stochastic_depth_drop_rate=stochastic_depth_drop_rate,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer,
- activation=self._activation,
- use_sync_bn=self._use_sync_bn,
- norm_momentum=self._norm_momentum,
- norm_epsilon=self._norm_epsilon)(
- inputs)
- for _ in range(1, block_repeats):
- x = nn_blocks.InvertedBottleneckBlock(
- in_filters=in_filters,
- out_filters=out_filters,
- strides=1,
- se_ratio=se_ratio,
- expand_ratio=expand_ratio,
- stochastic_depth_drop_rate=stochastic_depth_drop_rate,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer,
- activation=self._activation,
- use_sync_bn=self._use_sync_bn,
- norm_momentum=self._norm_momentum,
- norm_epsilon=self._norm_epsilon)(
- inputs)
- return tf.keras.layers.Activation('linear', name=name)(x)
-
- def _build_stem(self, inputs):
- """Builds SpineNet stem."""
- x = layers.Conv2D(
- filters=int(FILTER_SIZE_MAP[0] * self._filter_size_scale),
- kernel_size=3,
- strides=2,
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- inputs)
- x = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)(
- x)
- x = tf_utils.get_activation(self._activation, use_keras_layer=True)(x)
-
- net = []
- stem_strides = [1, 2]
- # Build the initial level 2 blocks.
- for i in range(self._num_init_blocks):
- x = self._block_group(
- inputs=x,
- in_filters=int(FILTER_SIZE_MAP[i] * self._filter_size_scale),
- out_filters=int(FILTER_SIZE_MAP[i + 1] * self._filter_size_scale),
- expand_ratio=self._expand_ratio,
- strides=stem_strides[i],
- se_ratio=self._se_ratio,
- block_repeats=self._block_repeats,
- name='stem_block_{}'.format(i + 1))
- net.append(x)
- return net
-
- def _build_scale_permuted_network(self,
- net,
- input_width,
- weighted_fusion=False):
- """Builds scale-permuted network."""
- net_sizes = [
- int(math.ceil(input_width / 2)),
- int(math.ceil(input_width / 2**2))
- ]
- num_outgoing_connections = [0] * len(net)
-
- endpoints = {}
- for i, block_spec in enumerate(self._block_specs):
- # Update block level if it is larger than max_level to avoid building
- # blocks smaller than requested.
- block_spec.level = min(block_spec.level, self._max_level)
- # Find out specs for the target block.
- target_width = int(math.ceil(input_width / 2**block_spec.level))
- target_num_filters = int(FILTER_SIZE_MAP[block_spec.level] *
- self._filter_size_scale)
-
- # Resample then merge input0 and input1.
- parents = []
- input0 = block_spec.input_offsets[0]
- input1 = block_spec.input_offsets[1]
-
- x0 = self._resample_with_sepconv(
- inputs=net[input0],
- input_width=net_sizes[input0],
- target_width=target_width,
- target_num_filters=target_num_filters)
- parents.append(x0)
- num_outgoing_connections[input0] += 1
-
- x1 = self._resample_with_sepconv(
- inputs=net[input1],
- input_width=net_sizes[input1],
- target_width=target_width,
- target_num_filters=target_num_filters)
- parents.append(x1)
- num_outgoing_connections[input1] += 1
-
- # Merge 0 outdegree blocks to the output block.
- if block_spec.is_output:
- for j, (j_feat,
- j_connections) in enumerate(zip(net, num_outgoing_connections)):
- if j_connections == 0 and (j_feat.shape[2] == target_width and
- j_feat.shape[3] == x0.shape[3]):
- parents.append(j_feat)
- num_outgoing_connections[j] += 1
-
- # pylint: disable=g-direct-tensorflow-import
- if weighted_fusion:
- dtype = parents[0].dtype
- parent_weights = [
- tf.nn.relu(tf.cast(tf.Variable(1.0, name='block{}_fusion{}'.format(
- i, j)), dtype=dtype)) for j in range(len(parents))]
- weights_sum = layers.Add()(parent_weights)
- parents = [
- parents[i] * parent_weights[i] / (weights_sum + 0.0001)
- for i in range(len(parents))
- ]
-
- # Fuse all parent nodes then build a new block.
- x = tf_utils.get_activation(
- self._activation, use_keras_layer=True)(layers.Add()(parents))
- x = self._block_group(
- inputs=x,
- in_filters=target_num_filters,
- out_filters=target_num_filters,
- strides=1,
- se_ratio=self._se_ratio,
- expand_ratio=self._expand_ratio,
- block_repeats=self._block_repeats,
- stochastic_depth_drop_rate=nn_layers.get_stochastic_depth_rate(
- self._init_stochastic_depth_rate, i + 1, len(self._block_specs)),
- name='scale_permuted_block_{}'.format(i + 1))
-
- net.append(x)
- net_sizes.append(target_width)
- num_outgoing_connections.append(0)
-
- # Save output feats.
- if block_spec.is_output:
- if block_spec.level in endpoints:
- raise ValueError('Duplicate feats found for output level {}.'.format(
- block_spec.level))
- if (block_spec.level < self._min_level or
- block_spec.level > self._max_level):
- logging.warning(
- 'SpineNet output level out of range [min_level, max_levle] = [%s, %s] will not be used for further processing.',
- self._min_level, self._max_level)
- endpoints[str(block_spec.level)] = x
-
- return endpoints
-
- def _build_endpoints(self, net):
- """Matches filter size for endpoints before sharing conv layers."""
- endpoints = {}
- for level in range(self._min_level, self._max_level + 1):
- x = layers.Conv2D(
- filters=self._endpoints_num_filters,
- kernel_size=1,
- strides=1,
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- net[str(level)])
- x = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)(
- x)
- x = tf_utils.get_activation(self._activation, use_keras_layer=True)(x)
- endpoints[str(level)] = x
- return endpoints
-
- def _resample_with_sepconv(self, inputs, input_width, target_width,
- target_num_filters):
- """Matches resolution and feature dimension."""
- x = inputs
- # Spatial resampling.
- if input_width > target_width:
- while input_width > target_width:
- x = layers.DepthwiseConv2D(
- kernel_size=3,
- strides=2,
- padding='SAME',
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- x)
- x = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)(
- x)
- x = tf_utils.get_activation(
- self._activation, use_keras_layer=True)(x)
- input_width /= 2
- elif input_width < target_width:
- scale = target_width // input_width
- x = spatial_transform_ops.nearest_upsampling(
- x, scale=scale, use_keras_layer=self._use_keras_upsampling_2d)
-
- # Last 1x1 conv to match filter size.
- x = layers.Conv2D(
- filters=target_num_filters,
- kernel_size=1,
- strides=1,
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- x)
- x = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)(
- x)
- return x
-
- def get_config(self):
- config_dict = {
- 'min_level': self._min_level,
- 'max_level': self._max_level,
- 'endpoints_num_filters': self._endpoints_num_filters,
- 'se_ratio': self._se_ratio,
- 'expand_ratio': self._expand_ratio,
- 'block_repeats': self._block_repeats,
- 'filter_size_scale': self._filter_size_scale,
- 'init_stochastic_depth_rate': self._init_stochastic_depth_rate,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- 'bias_regularizer': self._bias_regularizer,
- 'activation': self._activation,
- 'use_sync_bn': self._use_sync_bn,
- 'norm_momentum': self._norm_momentum,
- 'norm_epsilon': self._norm_epsilon,
- 'use_keras_upsampling_2d': self._use_keras_upsampling_2d,
- }
- return config_dict
-
- @classmethod
- def from_config(cls, config, custom_objects=None):
- return cls(**config)
-
- @property
- def output_specs(self):
- """A dict of {level: TensorShape} pairs for the model output."""
- return self._output_specs
-
-
-@factory.register_backbone_builder('spinenet_mobile')
-def build_spinenet_mobile(
- input_specs: tf.keras.layers.InputSpec,
- backbone_config: hyperparams.Config,
- norm_activation_config: hyperparams.Config,
- l2_regularizer: tf.keras.regularizers.Regularizer = None) -> tf.keras.Model:
- """Builds Mobile SpineNet backbone from a config."""
- backbone_type = backbone_config.type
- backbone_cfg = backbone_config.get()
- assert backbone_type == 'spinenet_mobile', (f'Inconsistent backbone type '
- f'{backbone_type}')
-
- model_id = backbone_cfg.model_id
- if model_id not in SCALING_MAP:
- raise ValueError(
- 'Mobile SpineNet-{} is not a valid architecture.'.format(model_id))
- scaling_params = SCALING_MAP[model_id]
-
- return SpineNetMobile(
- input_specs=input_specs,
- min_level=backbone_cfg.min_level,
- max_level=backbone_cfg.max_level,
- endpoints_num_filters=scaling_params['endpoints_num_filters'],
- block_repeats=scaling_params['block_repeats'],
- filter_size_scale=scaling_params['filter_size_scale'],
- se_ratio=backbone_cfg.se_ratio,
- expand_ratio=backbone_cfg.expand_ratio,
- init_stochastic_depth_rate=backbone_cfg.stochastic_depth_drop_rate,
- kernel_regularizer=l2_regularizer,
- activation=norm_activation_config.activation,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon,
- use_keras_upsampling_2d=backbone_cfg.use_keras_upsampling_2d)
diff --git a/official/vision/beta/modeling/backbones/spinenet_mobile_test.py b/official/vision/beta/modeling/backbones/spinenet_mobile_test.py
deleted file mode 100644
index 4f956610a3f2bcb3c558584ad3073b78606237a1..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/spinenet_mobile_test.py
+++ /dev/null
@@ -1,112 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-# Copyright 2020 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-# ==============================================================================
-"""Tests for SpineNet."""
-# Import libraries
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.vision.beta.modeling.backbones import spinenet_mobile
-
-
-class SpineNetMobileTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (128, 0.6, 1, 0.0, 24),
- (128, 0.65, 1, 0.2, 40),
- (256, 1.0, 1, 0.2, 48),
- )
- def test_network_creation(self, input_size, filter_size_scale, block_repeats,
- se_ratio, endpoints_num_filters):
- """Test creation of SpineNet models."""
- min_level = 3
- max_level = 7
-
- tf.keras.backend.set_image_data_format('channels_last')
-
- input_specs = tf.keras.layers.InputSpec(
- shape=[None, input_size, input_size, 3])
- model = spinenet_mobile.SpineNetMobile(
- input_specs=input_specs,
- min_level=min_level,
- max_level=max_level,
- endpoints_num_filters=endpoints_num_filters,
- resample_alpha=se_ratio,
- block_repeats=block_repeats,
- filter_size_scale=filter_size_scale,
- init_stochastic_depth_rate=0.2,
- )
-
- inputs = tf.keras.Input(shape=(input_size, input_size, 3), batch_size=1)
- endpoints = model(inputs)
-
- for l in range(min_level, max_level + 1):
- self.assertIn(str(l), endpoints.keys())
- self.assertAllEqual(
- [1, input_size / 2**l, input_size / 2**l, endpoints_num_filters],
- endpoints[str(l)].shape.as_list())
-
- def test_serialize_deserialize(self):
- # Create a network object that sets all of its config options.
- kwargs = dict(
- min_level=3,
- max_level=7,
- endpoints_num_filters=256,
- se_ratio=0.2,
- expand_ratio=6,
- block_repeats=1,
- filter_size_scale=1.0,
- init_stochastic_depth_rate=0.2,
- use_sync_bn=False,
- activation='relu',
- norm_momentum=0.99,
- norm_epsilon=0.001,
- kernel_initializer='VarianceScaling',
- kernel_regularizer=None,
- bias_regularizer=None,
- use_keras_upsampling_2d=False,
- )
- network = spinenet_mobile.SpineNetMobile(**kwargs)
-
- expected_config = dict(kwargs)
- self.assertEqual(network.get_config(), expected_config)
-
- # Create another network object from the first object's config.
- new_network = spinenet_mobile.SpineNetMobile.from_config(
- network.get_config())
-
- # Validate that the config can be forced to JSON.
- _ = new_network.to_json()
-
- # If the serialization was successful, the new config should match the old.
- self.assertAllEqual(network.get_config(), new_network.get_config())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/backbones/spinenet_test.py b/official/vision/beta/modeling/backbones/spinenet_test.py
deleted file mode 100644
index 39cda10d2a62dec8b1f49b3804198a6b814b3cfc..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/backbones/spinenet_test.py
+++ /dev/null
@@ -1,128 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for SpineNet."""
-# Import libraries
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.vision.beta.modeling.backbones import spinenet
-
-
-class SpineNetTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (128, 0.65, 1, 0.5, 128, 4, 6),
- (256, 1.0, 1, 0.5, 256, 3, 6),
- (384, 1.0, 2, 0.5, 256, 4, 7),
- (512, 1.0, 3, 1.0, 256, 3, 7),
- (640, 1.3, 4, 1.0, 384, 3, 7),
- )
- def test_network_creation(self, input_size, filter_size_scale, block_repeats,
- resample_alpha, endpoints_num_filters, min_level,
- max_level):
- """Test creation of SpineNet models."""
-
- tf.keras.backend.set_image_data_format('channels_last')
-
- input_specs = tf.keras.layers.InputSpec(
- shape=[None, input_size, input_size, 3])
- model = spinenet.SpineNet(
- input_specs=input_specs,
- min_level=min_level,
- max_level=max_level,
- endpoints_num_filters=endpoints_num_filters,
- resample_alpha=resample_alpha,
- block_repeats=block_repeats,
- filter_size_scale=filter_size_scale,
- init_stochastic_depth_rate=0.2,
- )
-
- inputs = tf.keras.Input(shape=(input_size, input_size, 3), batch_size=1)
- endpoints = model(inputs)
-
- for l in range(min_level, max_level + 1):
- self.assertIn(str(l), endpoints.keys())
- self.assertAllEqual(
- [1, input_size / 2**l, input_size / 2**l, endpoints_num_filters],
- endpoints[str(l)].shape.as_list())
-
- @parameterized.parameters(
- ((128, 128), (128, 128)),
- ((128, 128), (256, 256)),
- ((640, 640), (896, 1664)),
- )
- def test_load_from_different_input_specs(self, input_size_1, input_size_2):
- """Test loading checkpoints with different input size."""
-
- def build_spinenet(input_size):
- tf.keras.backend.set_image_data_format('channels_last')
- input_specs = tf.keras.layers.InputSpec(
- shape=[None, input_size[0], input_size[1], 3])
- model = spinenet.SpineNet(
- input_specs=input_specs,
- min_level=3,
- max_level=7,
- endpoints_num_filters=384,
- resample_alpha=1.0,
- block_repeats=2,
- filter_size_scale=0.5)
- return model
-
- model_1 = build_spinenet(input_size_1)
- model_2 = build_spinenet(input_size_2)
-
- ckpt_1 = tf.train.Checkpoint(backbone=model_1)
- ckpt_2 = tf.train.Checkpoint(backbone=model_2)
-
- ckpt_path = self.get_temp_dir() + '/ckpt'
- ckpt_1.write(ckpt_path)
- ckpt_2.restore(ckpt_path).expect_partial()
-
- def test_serialize_deserialize(self):
- # Create a network object that sets all of its config options.
- kwargs = dict(
- min_level=3,
- max_level=7,
- endpoints_num_filters=256,
- resample_alpha=0.5,
- block_repeats=1,
- filter_size_scale=1.0,
- init_stochastic_depth_rate=0.2,
- use_sync_bn=False,
- activation='relu',
- norm_momentum=0.99,
- norm_epsilon=0.001,
- kernel_initializer='VarianceScaling',
- kernel_regularizer=None,
- bias_regularizer=None,
- )
- network = spinenet.SpineNet(**kwargs)
-
- expected_config = dict(kwargs)
- self.assertEqual(network.get_config(), expected_config)
-
- # Create another network object from the first object's config.
- new_network = spinenet.SpineNet.from_config(network.get_config())
-
- # Validate that the config can be forced to JSON.
- _ = new_network.to_json()
-
- # If the serialization was successful, the new config should match the old.
- self.assertAllEqual(network.get_config(), new_network.get_config())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/classification_model.py b/official/vision/beta/modeling/classification_model.py
deleted file mode 100644
index 5a97342eaa2251c2862089ca6c5c2b587a822751..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/classification_model.py
+++ /dev/null
@@ -1,122 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Build classification models."""
-
-from typing import Any, Mapping, Optional
-# Import libraries
-import tensorflow as tf
-
-layers = tf.keras.layers
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class ClassificationModel(tf.keras.Model):
- """A classification class builder."""
-
- def __init__(
- self,
- backbone: tf.keras.Model,
- num_classes: int,
- input_specs: tf.keras.layers.InputSpec = layers.InputSpec(
- shape=[None, None, None, 3]),
- dropout_rate: float = 0.0,
- kernel_initializer: str = 'random_uniform',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- add_head_batch_norm: bool = False,
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- skip_logits_layer: bool = False,
- **kwargs):
- """Classification initialization function.
-
- Args:
- backbone: a backbone network.
- num_classes: `int` number of classes in classification task.
- input_specs: `tf.keras.layers.InputSpec` specs of the input tensor.
- dropout_rate: `float` rate for dropout regularization.
- kernel_initializer: kernel initializer for the dense layer.
- kernel_regularizer: tf.keras.regularizers.Regularizer object. Default to
- None.
- bias_regularizer: tf.keras.regularizers.Regularizer object. Default to
- None.
- add_head_batch_norm: `bool` whether to add a batch normalization layer
- before pool.
- use_sync_bn: `bool` if True, use synchronized batch normalization.
- norm_momentum: `float` normalization momentum for the moving average.
- norm_epsilon: `float` small float added to variance to avoid dividing by
- zero.
- skip_logits_layer: `bool`, whether to skip the prediction layer.
- **kwargs: keyword arguments to be passed.
- """
- if use_sync_bn:
- norm = tf.keras.layers.experimental.SyncBatchNormalization
- else:
- norm = tf.keras.layers.BatchNormalization
- axis = -1 if tf.keras.backend.image_data_format() == 'channels_last' else 1
-
- inputs = tf.keras.Input(shape=input_specs.shape[1:], name=input_specs.name)
- endpoints = backbone(inputs)
- x = endpoints[max(endpoints.keys())]
-
- if add_head_batch_norm:
- x = norm(axis=axis, momentum=norm_momentum, epsilon=norm_epsilon)(x)
- x = tf.keras.layers.GlobalAveragePooling2D()(x)
- if not skip_logits_layer:
- x = tf.keras.layers.Dropout(dropout_rate)(x)
- x = tf.keras.layers.Dense(
- num_classes,
- kernel_initializer=kernel_initializer,
- kernel_regularizer=kernel_regularizer,
- bias_regularizer=bias_regularizer)(
- x)
-
- super(ClassificationModel, self).__init__(
- inputs=inputs, outputs=x, **kwargs)
- self._config_dict = {
- 'backbone': backbone,
- 'num_classes': num_classes,
- 'input_specs': input_specs,
- 'dropout_rate': dropout_rate,
- 'kernel_initializer': kernel_initializer,
- 'kernel_regularizer': kernel_regularizer,
- 'bias_regularizer': bias_regularizer,
- 'add_head_batch_norm': add_head_batch_norm,
- 'use_sync_bn': use_sync_bn,
- 'norm_momentum': norm_momentum,
- 'norm_epsilon': norm_epsilon,
- }
- self._input_specs = input_specs
- self._kernel_regularizer = kernel_regularizer
- self._bias_regularizer = bias_regularizer
- self._backbone = backbone
- self._norm = norm
-
- @property
- def checkpoint_items(self) -> Mapping[str, tf.keras.Model]:
- """Returns a dictionary of items to be additionally checkpointed."""
- return dict(backbone=self.backbone)
-
- @property
- def backbone(self) -> tf.keras.Model:
- return self._backbone
-
- def get_config(self) -> Mapping[str, Any]:
- return self._config_dict
-
- @classmethod
- def from_config(cls, config, custom_objects=None):
- return cls(**config)
diff --git a/official/vision/beta/modeling/classification_model_test.py b/official/vision/beta/modeling/classification_model_test.py
deleted file mode 100644
index 32e0aac6e92c3c5d9a5782ff3599b2732165de24..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/classification_model_test.py
+++ /dev/null
@@ -1,184 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for classification network."""
-
-# Import libraries
-from absl.testing import parameterized
-import numpy as np
-import tensorflow as tf
-
-from tensorflow.python.distribute import combinations
-from tensorflow.python.distribute import strategy_combinations
-from official.vision.beta.modeling import backbones
-from official.vision.beta.modeling import classification_model
-
-
-class ClassificationNetworkTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (128, 50, 'relu'),
- (128, 50, 'relu'),
- (128, 50, 'swish'),
- )
- def test_resnet_network_creation(
- self, input_size, resnet_model_id, activation):
- """Test for creation of a ResNet-50 classifier."""
- inputs = np.random.rand(2, input_size, input_size, 3)
-
- tf.keras.backend.set_image_data_format('channels_last')
-
- backbone = backbones.ResNet(
- model_id=resnet_model_id, activation=activation)
- self.assertEqual(backbone.count_params(), 23561152)
-
- num_classes = 1000
- model = classification_model.ClassificationModel(
- backbone=backbone,
- num_classes=num_classes,
- dropout_rate=0.2,
- )
- self.assertEqual(model.count_params(), 25610152)
-
- logits = model(inputs)
- self.assertAllEqual([2, num_classes], logits.numpy().shape)
-
- def test_revnet_network_creation(self):
- """Test for creation of a RevNet-56 classifier."""
- revnet_model_id = 56
- inputs = np.random.rand(2, 224, 224, 3)
-
- tf.keras.backend.set_image_data_format('channels_last')
-
- backbone = backbones.RevNet(model_id=revnet_model_id)
- self.assertEqual(backbone.count_params(), 19473792)
-
- num_classes = 1000
- model = classification_model.ClassificationModel(
- backbone=backbone,
- num_classes=num_classes,
- dropout_rate=0.2,
- add_head_batch_norm=True,
- )
- self.assertEqual(model.count_params(), 22816104)
-
- logits = model(inputs)
- self.assertAllEqual([2, num_classes], logits.numpy().shape)
-
- @combinations.generate(
- combinations.combine(
- mobilenet_model_id=[
- 'MobileNetV1',
- 'MobileNetV2',
- 'MobileNetV3Large',
- 'MobileNetV3Small',
- 'MobileNetV3EdgeTPU',
- 'MobileNetMultiAVG',
- 'MobileNetMultiMAX',
- ],
- filter_size_scale=[1.0, 0.75],
- ))
- def test_mobilenet_network_creation(self, mobilenet_model_id,
- filter_size_scale):
- """Test for creation of a MobileNet classifier."""
- inputs = np.random.rand(2, 224, 224, 3)
-
- tf.keras.backend.set_image_data_format('channels_last')
-
- backbone = backbones.MobileNet(
- model_id=mobilenet_model_id, filter_size_scale=filter_size_scale)
-
- num_classes = 1001
- model = classification_model.ClassificationModel(
- backbone=backbone,
- num_classes=num_classes,
- dropout_rate=0.2,
- )
-
- logits = model(inputs)
- self.assertAllEqual([2, num_classes], logits.numpy().shape)
-
- @combinations.generate(
- combinations.combine(
- strategy=[
- strategy_combinations.cloud_tpu_strategy,
- strategy_combinations.one_device_strategy_gpu,
- ],
- use_sync_bn=[False, True],
- ))
- def test_sync_bn_multiple_devices(self, strategy, use_sync_bn):
- """Test for sync bn on TPU and GPU devices."""
- inputs = np.random.rand(64, 128, 128, 3)
-
- tf.keras.backend.set_image_data_format('channels_last')
-
- with strategy.scope():
- backbone = backbones.ResNet(model_id=50, use_sync_bn=use_sync_bn)
-
- model = classification_model.ClassificationModel(
- backbone=backbone,
- num_classes=1000,
- dropout_rate=0.2,
- )
- _ = model(inputs)
-
- @combinations.generate(
- combinations.combine(
- strategy=[
- strategy_combinations.one_device_strategy_gpu,
- ],
- data_format=['channels_last', 'channels_first'],
- input_dim=[1, 3, 4]))
- def test_data_format_gpu(self, strategy, data_format, input_dim):
- """Test for different data formats on GPU devices."""
- if data_format == 'channels_last':
- inputs = np.random.rand(2, 128, 128, input_dim)
- else:
- inputs = np.random.rand(2, input_dim, 128, 128)
- input_specs = tf.keras.layers.InputSpec(shape=inputs.shape)
-
- tf.keras.backend.set_image_data_format(data_format)
-
- with strategy.scope():
- backbone = backbones.ResNet(model_id=50, input_specs=input_specs)
-
- model = classification_model.ClassificationModel(
- backbone=backbone,
- num_classes=1000,
- input_specs=input_specs,
- )
- _ = model(inputs)
-
- def test_serialize_deserialize(self):
- """Validate the classification net can be serialized and deserialized."""
-
- tf.keras.backend.set_image_data_format('channels_last')
- backbone = backbones.ResNet(model_id=50)
-
- model = classification_model.ClassificationModel(
- backbone=backbone, num_classes=1000)
-
- config = model.get_config()
- new_model = classification_model.ClassificationModel.from_config(config)
-
- # Validate that the config can be forced to JSON.
- _ = new_model.to_json()
-
- # If the serialization was successful, the new config should match the old.
- self.assertAllEqual(model.get_config(), new_model.get_config())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/decoders/aspp.py b/official/vision/beta/modeling/decoders/aspp.py
deleted file mode 100644
index 6c99da0c86a44b154b26e2c49b88d7bb8e434bc5..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/decoders/aspp.py
+++ /dev/null
@@ -1,203 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains definitions of Atrous Spatial Pyramid Pooling (ASPP) decoder."""
-from typing import Any, List, Mapping, Optional, Union
-
-# Import libraries
-
-import tensorflow as tf
-
-from official.modeling import hyperparams
-from official.vision.beta.modeling.decoders import factory
-from official.vision.beta.modeling.layers import deeplab
-from official.vision.beta.modeling.layers import nn_layers
-
-TensorMapUnion = Union[tf.Tensor, Mapping[str, tf.Tensor]]
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class ASPP(tf.keras.layers.Layer):
- """Creates an Atrous Spatial Pyramid Pooling (ASPP) layer."""
-
- def __init__(
- self,
- level: int,
- dilation_rates: List[int],
- num_filters: int = 256,
- pool_kernel_size: Optional[int] = None,
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- activation: str = 'relu',
- dropout_rate: float = 0.0,
- kernel_initializer: str = 'VarianceScaling',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- interpolation: str = 'bilinear',
- use_depthwise_convolution: bool = False,
- spp_layer_version: str = 'v1',
- output_tensor: bool = False,
- **kwargs):
- """Initializes an Atrous Spatial Pyramid Pooling (ASPP) layer.
-
- Args:
- level: An `int` level to apply ASPP.
- dilation_rates: A `list` of dilation rates.
- num_filters: An `int` number of output filters in ASPP.
- pool_kernel_size: A `list` of [height, width] of pooling kernel size or
- None. Pooling size is with respect to original image size, it will be
- scaled down by 2**level. If None, global average pooling is used.
- use_sync_bn: A `bool`. If True, use synchronized batch normalization.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- activation: A `str` activation to be used in ASPP.
- dropout_rate: A `float` rate for dropout regularization.
- kernel_initializer: A `str` name of kernel_initializer for convolutional
- layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default is None.
- interpolation: A `str` of interpolation method. It should be one of
- `bilinear`, `nearest`, `bicubic`, `area`, `lanczos3`, `lanczos5`,
- `gaussian`, or `mitchellcubic`.
- use_depthwise_convolution: If True depthwise separable convolutions will
- be added to the Atrous spatial pyramid pooling.
- spp_layer_version: A `str` of spatial pyramid pooling layer version.
- output_tensor: Whether to output a single tensor or a dictionary of tensor.
- Default is false.
- **kwargs: Additional keyword arguments to be passed.
- """
- super().__init__(**kwargs)
- self._config_dict = {
- 'level': level,
- 'dilation_rates': dilation_rates,
- 'num_filters': num_filters,
- 'pool_kernel_size': pool_kernel_size,
- 'use_sync_bn': use_sync_bn,
- 'norm_momentum': norm_momentum,
- 'norm_epsilon': norm_epsilon,
- 'activation': activation,
- 'dropout_rate': dropout_rate,
- 'kernel_initializer': kernel_initializer,
- 'kernel_regularizer': kernel_regularizer,
- 'interpolation': interpolation,
- 'use_depthwise_convolution': use_depthwise_convolution,
- 'spp_layer_version': spp_layer_version,
- 'output_tensor': output_tensor
- }
- self._aspp_layer = deeplab.SpatialPyramidPooling if self._config_dict[
- 'spp_layer_version'] == 'v1' else nn_layers.SpatialPyramidPooling
-
- def build(self, input_shape):
- pool_kernel_size = None
- if self._config_dict['pool_kernel_size']:
- pool_kernel_size = [
- int(p_size // 2**self._config_dict['level'])
- for p_size in self._config_dict['pool_kernel_size']
- ]
-
- self.aspp = self._aspp_layer(
- output_channels=self._config_dict['num_filters'],
- dilation_rates=self._config_dict['dilation_rates'],
- pool_kernel_size=pool_kernel_size,
- use_sync_bn=self._config_dict['use_sync_bn'],
- batchnorm_momentum=self._config_dict['norm_momentum'],
- batchnorm_epsilon=self._config_dict['norm_epsilon'],
- activation=self._config_dict['activation'],
- dropout=self._config_dict['dropout_rate'],
- kernel_initializer=self._config_dict['kernel_initializer'],
- kernel_regularizer=self._config_dict['kernel_regularizer'],
- interpolation=self._config_dict['interpolation'],
- use_depthwise_convolution=self._config_dict['use_depthwise_convolution']
- )
-
- def call(self, inputs: TensorMapUnion) -> TensorMapUnion:
- """Calls the Atrous Spatial Pyramid Pooling (ASPP) layer on an input.
-
- The output of ASPP will be a dict of {`level`, `tf.Tensor`} even if only one
- level is present, if output_tensor is false. Hence, this will be compatible
- with the rest of the segmentation model interfaces.
- If output_tensor is true, a single tensot is output.
-
- Args:
- inputs: A `tf.Tensor` of shape [batch, height_l, width_l, filter_size] or
- a `dict` of `tf.Tensor` where
- - key: A `str` of the level of the multilevel feature maps.
- - values: A `tf.Tensor` of shape [batch, height_l, width_l,
- filter_size].
-
- Returns:
- A `tf.Tensor` of shape [batch, height_l, width_l, filter_size] or a `dict`
- of `tf.Tensor` where
- - key: A `str` of the level of the multilevel feature maps.
- - values: A `tf.Tensor` of output of ASPP module.
- """
- outputs = {}
- level = str(self._config_dict['level'])
- backbone_output = inputs[level] if isinstance(inputs, dict) else inputs
- outputs = self.aspp(backbone_output)
- return outputs if self._config_dict['output_tensor'] else {level: outputs}
-
- def get_config(self) -> Mapping[str, Any]:
- base_config = super().get_config()
- return dict(list(base_config.items()) + list(self._config_dict.items()))
-
- @classmethod
- def from_config(cls, config, custom_objects=None):
- return cls(**config)
-
-
-@factory.register_decoder_builder('aspp')
-def build_aspp_decoder(
- input_specs: Mapping[str, tf.TensorShape],
- model_config: hyperparams.Config,
- l2_regularizer: Optional[tf.keras.regularizers.Regularizer] = None
-) -> tf.keras.Model:
- """Builds ASPP decoder from a config.
-
- Args:
- input_specs: A `dict` of input specifications. A dictionary consists of
- {level: TensorShape} from a backbone. Note this is for consistent
- interface, and is not used by ASPP decoder.
- model_config: A OneOfConfig. Model config.
- l2_regularizer: A `tf.keras.regularizers.Regularizer` instance. Default to
- None.
-
- Returns:
- A `tf.keras.Model` instance of the ASPP decoder.
-
- Raises:
- ValueError: If the model_config.decoder.type is not `aspp`.
- """
- del input_specs # input_specs is not used by ASPP decoder.
- decoder_type = model_config.decoder.type
- decoder_cfg = model_config.decoder.get()
- if decoder_type != 'aspp':
- raise ValueError(f'Inconsistent decoder type {decoder_type}. '
- 'Need to be `aspp`.')
-
- norm_activation_config = model_config.norm_activation
- return ASPP(
- level=decoder_cfg.level,
- dilation_rates=decoder_cfg.dilation_rates,
- num_filters=decoder_cfg.num_filters,
- use_depthwise_convolution=decoder_cfg.use_depthwise_convolution,
- pool_kernel_size=decoder_cfg.pool_kernel_size,
- dropout_rate=decoder_cfg.dropout_rate,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon,
- activation=norm_activation_config.activation,
- kernel_regularizer=l2_regularizer,
- spp_layer_version=decoder_cfg.spp_layer_version,
- output_tensor=decoder_cfg.output_tensor)
diff --git a/official/vision/beta/modeling/decoders/aspp_test.py b/official/vision/beta/modeling/decoders/aspp_test.py
deleted file mode 100644
index 1b7638d8d29601e86060a0e9d70cde9f2e6bb3d9..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/decoders/aspp_test.py
+++ /dev/null
@@ -1,94 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for aspp."""
-
-# Import libraries
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.vision.beta.modeling.backbones import resnet
-from official.vision.beta.modeling.decoders import aspp
-
-
-class ASPPTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (3, [6, 12, 18, 24], 128, 'v1'),
- (3, [6, 12, 18], 128, 'v1'),
- (3, [6, 12], 256, 'v1'),
- (4, [6, 12, 18, 24], 128, 'v2'),
- (4, [6, 12, 18], 128, 'v2'),
- (4, [6, 12], 256, 'v2'),
- )
- def test_network_creation(self, level, dilation_rates, num_filters,
- spp_layer_version):
- """Test creation of ASPP."""
-
- input_size = 256
- tf.keras.backend.set_image_data_format('channels_last')
-
- inputs = tf.keras.Input(shape=(input_size, input_size, 3), batch_size=1)
-
- backbone = resnet.ResNet(model_id=50)
- network = aspp.ASPP(
- level=level,
- dilation_rates=dilation_rates,
- num_filters=num_filters,
- spp_layer_version=spp_layer_version)
-
- endpoints = backbone(inputs)
- feats = network(endpoints)
-
- self.assertIn(str(level), feats)
- self.assertAllEqual(
- [1, input_size // 2**level, input_size // 2**level, num_filters],
- feats[str(level)].shape.as_list())
-
- def test_serialize_deserialize(self):
- # Create a network object that sets all of its config options.
- kwargs = dict(
- level=3,
- dilation_rates=[6, 12],
- num_filters=256,
- pool_kernel_size=None,
- use_sync_bn=False,
- norm_momentum=0.99,
- norm_epsilon=0.001,
- activation='relu',
- kernel_initializer='VarianceScaling',
- kernel_regularizer=None,
- interpolation='bilinear',
- dropout_rate=0.2,
- use_depthwise_convolution='false',
- spp_layer_version='v1',
- output_tensor=False,
- dtype='float32',
- name='aspp',
- trainable=True)
- network = aspp.ASPP(**kwargs)
-
- expected_config = dict(kwargs)
- self.assertEqual(network.get_config(), expected_config)
-
- # Create another network object from the first object's config.
- new_network = aspp.ASPP.from_config(network.get_config())
-
- # If the serialization was successful, the new config should match the old.
- self.assertAllEqual(network.get_config(), new_network.get_config())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/decoders/factory.py b/official/vision/beta/modeling/decoders/factory.py
deleted file mode 100644
index d1f732b9b68c63a8624c0d0599d33a0cece98f28..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/decoders/factory.py
+++ /dev/null
@@ -1,135 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Decoder registers and factory method.
-
-One can register a new decoder model by the following two steps:
-
-1 Import the factory and register the build in the decoder file.
-2 Import the decoder class and add a build in __init__.py.
-
-```
-# my_decoder.py
-
-from modeling.decoders import factory
-
-class MyDecoder():
- ...
-
-@factory.register_decoder_builder('my_decoder')
-def build_my_decoder():
- return MyDecoder()
-
-# decoders/__init__.py adds import
-from modeling.decoders.my_decoder import MyDecoder
-```
-
-If one wants the MyDecoder class to be used only by those binary
-then don't imported the decoder module in decoders/__init__.py, but import it
-in place that uses it.
-"""
-from typing import Any, Callable, Mapping, Optional, Union
-
-# Import libraries
-
-import tensorflow as tf
-
-from official.core import registry
-from official.modeling import hyperparams
-
-_REGISTERED_DECODER_CLS = {}
-
-
-def register_decoder_builder(key: str) -> Callable[..., Any]:
- """Decorates a builder of decoder class.
-
- The builder should be a Callable (a class or a function).
- This decorator supports registration of decoder builder as follows:
-
- ```
- class MyDecoder(tf.keras.Model):
- pass
-
- @register_decoder_builder('mydecoder')
- def builder(input_specs, config, l2_reg):
- return MyDecoder(...)
-
- # Builds a MyDecoder object.
- my_decoder = build_decoder_3d(input_specs, config, l2_reg)
- ```
-
- Args:
- key: A `str` of key to look up the builder.
-
- Returns:
- A callable for using as class decorator that registers the decorated class
- for creation from an instance of task_config_cls.
- """
- return registry.register(_REGISTERED_DECODER_CLS, key)
-
-
-@register_decoder_builder('identity')
-def build_identity(
- input_specs: Optional[Mapping[str, tf.TensorShape]] = None,
- model_config: Optional[hyperparams.Config] = None,
- l2_regularizer: Optional[tf.keras.regularizers.Regularizer] = None) -> None:
- """Builds identity decoder from a config.
-
- All the input arguments are not used by identity decoder but kept here to
- ensure the interface is consistent.
-
- Args:
- input_specs: A `dict` of input specifications. A dictionary consists of
- {level: TensorShape} from a backbone.
- model_config: A `OneOfConfig` of model config.
- l2_regularizer: A `tf.keras.regularizers.Regularizer` object. Default to
- None.
-
- Returns:
- An instance of the identity decoder.
- """
- del input_specs, model_config, l2_regularizer # Unused by identity decoder.
-
-
-def build_decoder(
- input_specs: Mapping[str, tf.TensorShape],
- model_config: hyperparams.Config,
- l2_regularizer: tf.keras.regularizers.Regularizer = None,
- **kwargs) -> Union[None, tf.keras.Model, tf.keras.layers.Layer]: # pytype: disable=annotation-type-mismatch # typed-keras
- """Builds decoder from a config.
-
- A decoder can be a keras.Model, a keras.layers.Layer, or None. If it is not
- None, the decoder will take features from the backbone as input and generate
- decoded feature maps. If it is None, such as an identity decoder, the decoder
- is skipped and features from the backbone are regarded as model output.
-
- Args:
- input_specs: A `dict` of input specifications. A dictionary consists of
- {level: TensorShape} from a backbone.
- model_config: A `OneOfConfig` of model config.
- l2_regularizer: A `tf.keras.regularizers.Regularizer` object. Default to
- None.
- **kwargs: Additional keyword args to be passed to decoder builder.
-
- Returns:
- An instance of the decoder.
- """
- decoder_builder = registry.lookup(_REGISTERED_DECODER_CLS,
- model_config.decoder.type)
-
- return decoder_builder(
- input_specs=input_specs,
- model_config=model_config,
- l2_regularizer=l2_regularizer,
- **kwargs)
diff --git a/official/vision/beta/modeling/decoders/factory_test.py b/official/vision/beta/modeling/decoders/factory_test.py
deleted file mode 100644
index 844a5b02090dbf2100fb31ae58e141c2d59a82b9..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/decoders/factory_test.py
+++ /dev/null
@@ -1,159 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for decoder factory functions."""
-
-from absl.testing import parameterized
-import tensorflow as tf
-
-from tensorflow.python.distribute import combinations
-from official.vision.beta import configs
-from official.vision.beta.configs import decoders as decoders_cfg
-from official.vision.beta.modeling import decoders
-from official.vision.beta.modeling.decoders import factory
-
-
-class FactoryTest(tf.test.TestCase, parameterized.TestCase):
-
- @combinations.generate(
- combinations.combine(
- num_filters=[128, 256], use_separable_conv=[True, False]))
- def test_fpn_decoder_creation(self, num_filters, use_separable_conv):
- """Test creation of FPN decoder."""
- min_level = 3
- max_level = 7
- input_specs = {}
- for level in range(min_level, max_level):
- input_specs[str(level)] = tf.TensorShape(
- [1, 128 // (2**level), 128 // (2**level), 3])
-
- network = decoders.FPN(
- input_specs=input_specs,
- num_filters=num_filters,
- use_separable_conv=use_separable_conv,
- use_sync_bn=True)
-
- model_config = configs.retinanet.RetinaNet()
- model_config.min_level = min_level
- model_config.max_level = max_level
- model_config.num_classes = 10
- model_config.input_size = [None, None, 3]
- model_config.decoder = decoders_cfg.Decoder(
- type='fpn',
- fpn=decoders_cfg.FPN(
- num_filters=num_filters, use_separable_conv=use_separable_conv))
-
- factory_network = factory.build_decoder(
- input_specs=input_specs, model_config=model_config)
-
- network_config = network.get_config()
- factory_network_config = factory_network.get_config()
-
- self.assertEqual(network_config, factory_network_config)
-
- @combinations.generate(
- combinations.combine(
- num_filters=[128, 256],
- num_repeats=[3, 5],
- use_separable_conv=[True, False]))
- def test_nasfpn_decoder_creation(self, num_filters, num_repeats,
- use_separable_conv):
- """Test creation of NASFPN decoder."""
- min_level = 3
- max_level = 7
- input_specs = {}
- for level in range(min_level, max_level):
- input_specs[str(level)] = tf.TensorShape(
- [1, 128 // (2**level), 128 // (2**level), 3])
-
- network = decoders.NASFPN(
- input_specs=input_specs,
- num_filters=num_filters,
- num_repeats=num_repeats,
- use_separable_conv=use_separable_conv,
- use_sync_bn=True)
-
- model_config = configs.retinanet.RetinaNet()
- model_config.min_level = min_level
- model_config.max_level = max_level
- model_config.num_classes = 10
- model_config.input_size = [None, None, 3]
- model_config.decoder = decoders_cfg.Decoder(
- type='nasfpn',
- nasfpn=decoders_cfg.NASFPN(
- num_filters=num_filters,
- num_repeats=num_repeats,
- use_separable_conv=use_separable_conv))
-
- factory_network = factory.build_decoder(
- input_specs=input_specs, model_config=model_config)
-
- network_config = network.get_config()
- factory_network_config = factory_network.get_config()
-
- self.assertEqual(network_config, factory_network_config)
-
- @combinations.generate(
- combinations.combine(
- level=[3, 4],
- dilation_rates=[[6, 12, 18], [6, 12]],
- num_filters=[128, 256]))
- def test_aspp_decoder_creation(self, level, dilation_rates, num_filters):
- """Test creation of ASPP decoder."""
- input_specs = {'1': tf.TensorShape([1, 128, 128, 3])}
-
- network = decoders.ASPP(
- level=level,
- dilation_rates=dilation_rates,
- num_filters=num_filters,
- use_sync_bn=True)
-
- model_config = configs.semantic_segmentation.SemanticSegmentationModel()
- model_config.num_classes = 10
- model_config.input_size = [None, None, 3]
- model_config.decoder = decoders_cfg.Decoder(
- type='aspp',
- aspp=decoders_cfg.ASPP(
- level=level, dilation_rates=dilation_rates,
- num_filters=num_filters))
-
- factory_network = factory.build_decoder(
- input_specs=input_specs, model_config=model_config)
-
- network_config = network.get_config()
- factory_network_config = factory_network.get_config()
- # Due to calling `super().get_config()` in aspp layer, everything but the
- # the name of two layer instances are the same, so we force equal name so it
- # will not give false alarm.
- factory_network_config['name'] = network_config['name']
-
- self.assertEqual(network_config, factory_network_config)
-
- def test_identity_decoder_creation(self):
- """Test creation of identity decoder."""
- model_config = configs.retinanet.RetinaNet()
- model_config.num_classes = 2
- model_config.input_size = [None, None, 3]
-
- model_config.decoder = decoders_cfg.Decoder(
- type='identity', identity=decoders_cfg.Identity())
-
- factory_network = factory.build_decoder(
- input_specs=None, model_config=model_config)
-
- self.assertIsNone(factory_network)
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/decoders/fpn.py b/official/vision/beta/modeling/decoders/fpn.py
deleted file mode 100644
index f48739f7159c133a9137a537f4eb128f102af9e4..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/decoders/fpn.py
+++ /dev/null
@@ -1,246 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains the definitions of Feature Pyramid Networks (FPN)."""
-from typing import Any, Mapping, Optional
-
-# Import libraries
-from absl import logging
-import tensorflow as tf
-
-from official.modeling import hyperparams
-from official.modeling import tf_utils
-from official.vision.beta.modeling.decoders import factory
-from official.vision.beta.ops import spatial_transform_ops
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class FPN(tf.keras.Model):
- """Creates a Feature Pyramid Network (FPN).
-
- This implemets the paper:
- Tsung-Yi Lin, Piotr Dollar, Ross Girshick, Kaiming He, Bharath Hariharan, and
- Serge Belongie.
- Feature Pyramid Networks for Object Detection.
- (https://arxiv.org/pdf/1612.03144)
- """
-
- def __init__(
- self,
- input_specs: Mapping[str, tf.TensorShape],
- min_level: int = 3,
- max_level: int = 7,
- num_filters: int = 256,
- fusion_type: str = 'sum',
- use_separable_conv: bool = False,
- activation: str = 'relu',
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- kernel_initializer: str = 'VarianceScaling',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- **kwargs):
- """Initializes a Feature Pyramid Network (FPN).
-
- Args:
- input_specs: A `dict` of input specifications. A dictionary consists of
- {level: TensorShape} from a backbone.
- min_level: An `int` of minimum level in FPN output feature maps.
- max_level: An `int` of maximum level in FPN output feature maps.
- num_filters: An `int` number of filters in FPN layers.
- fusion_type: A `str` of `sum` or `concat`. Whether performing sum or
- concat for feature fusion.
- use_separable_conv: A `bool`. If True use separable convolution for
- convolution in FPN layers.
- activation: A `str` name of the activation function.
- use_sync_bn: A `bool`. If True, use synchronized batch normalization.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- kernel_initializer: A `str` name of kernel_initializer for convolutional
- layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default is None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2D.
- **kwargs: Additional keyword arguments to be passed.
- """
- self._config_dict = {
- 'input_specs': input_specs,
- 'min_level': min_level,
- 'max_level': max_level,
- 'num_filters': num_filters,
- 'fusion_type': fusion_type,
- 'use_separable_conv': use_separable_conv,
- 'activation': activation,
- 'use_sync_bn': use_sync_bn,
- 'norm_momentum': norm_momentum,
- 'norm_epsilon': norm_epsilon,
- 'kernel_initializer': kernel_initializer,
- 'kernel_regularizer': kernel_regularizer,
- 'bias_regularizer': bias_regularizer,
- }
- if use_separable_conv:
- conv2d = tf.keras.layers.SeparableConv2D
- else:
- conv2d = tf.keras.layers.Conv2D
- if use_sync_bn:
- norm = tf.keras.layers.experimental.SyncBatchNormalization
- else:
- norm = tf.keras.layers.BatchNormalization
- activation_fn = tf.keras.layers.Activation(
- tf_utils.get_activation(activation))
-
- # Build input feature pyramid.
- if tf.keras.backend.image_data_format() == 'channels_last':
- bn_axis = -1
- else:
- bn_axis = 1
-
- # Get input feature pyramid from backbone.
- logging.info('FPN input_specs: %s', input_specs)
- inputs = self._build_input_pyramid(input_specs, min_level)
- backbone_max_level = min(int(max(inputs.keys())), max_level)
-
- # Build lateral connections.
- feats_lateral = {}
- for level in range(min_level, backbone_max_level + 1):
- feats_lateral[str(level)] = conv2d(
- filters=num_filters,
- kernel_size=1,
- padding='same',
- kernel_initializer=kernel_initializer,
- kernel_regularizer=kernel_regularizer,
- bias_regularizer=bias_regularizer)(
- inputs[str(level)])
-
- # Build top-down path.
- feats = {str(backbone_max_level): feats_lateral[str(backbone_max_level)]}
- for level in range(backbone_max_level - 1, min_level - 1, -1):
- feat_a = spatial_transform_ops.nearest_upsampling(
- feats[str(level + 1)], 2)
- feat_b = feats_lateral[str(level)]
-
- if fusion_type == 'sum':
- feats[str(level)] = feat_a + feat_b
- elif fusion_type == 'concat':
- feats[str(level)] = tf.concat([feat_a, feat_b], axis=-1)
- else:
- raise ValueError('Fusion type {} not supported.'.format(fusion_type))
-
- # TODO(xianzhi): consider to remove bias in conv2d.
- # Build post-hoc 3x3 convolution kernel.
- for level in range(min_level, backbone_max_level + 1):
- feats[str(level)] = conv2d(
- filters=num_filters,
- strides=1,
- kernel_size=3,
- padding='same',
- kernel_initializer=kernel_initializer,
- kernel_regularizer=kernel_regularizer,
- bias_regularizer=bias_regularizer)(
- feats[str(level)])
-
- # TODO(xianzhi): consider to remove bias in conv2d.
- # Build coarser FPN levels introduced for RetinaNet.
- for level in range(backbone_max_level + 1, max_level + 1):
- feats_in = feats[str(level - 1)]
- if level > backbone_max_level + 1:
- feats_in = activation_fn(feats_in)
- feats[str(level)] = conv2d(
- filters=num_filters,
- strides=2,
- kernel_size=3,
- padding='same',
- kernel_initializer=kernel_initializer,
- kernel_regularizer=kernel_regularizer,
- bias_regularizer=bias_regularizer)(
- feats_in)
-
- # Apply batch norm layers.
- for level in range(min_level, max_level + 1):
- feats[str(level)] = norm(
- axis=bn_axis, momentum=norm_momentum, epsilon=norm_epsilon)(
- feats[str(level)])
-
- self._output_specs = {
- str(level): feats[str(level)].get_shape()
- for level in range(min_level, max_level + 1)
- }
-
- super(FPN, self).__init__(inputs=inputs, outputs=feats, **kwargs)
-
- def _build_input_pyramid(self, input_specs: Mapping[str, tf.TensorShape],
- min_level: int):
- assert isinstance(input_specs, dict)
- if min(input_specs.keys()) > str(min_level):
- raise ValueError(
- 'Backbone min level should be less or equal to FPN min level')
-
- inputs = {}
- for level, spec in input_specs.items():
- inputs[level] = tf.keras.Input(shape=spec[1:])
- return inputs
-
- def get_config(self) -> Mapping[str, Any]:
- return self._config_dict
-
- @classmethod
- def from_config(cls, config, custom_objects=None):
- return cls(**config)
-
- @property
- def output_specs(self) -> Mapping[str, tf.TensorShape]:
- """A dict of {level: TensorShape} pairs for the model output."""
- return self._output_specs
-
-
-@factory.register_decoder_builder('fpn')
-def build_fpn_decoder(
- input_specs: Mapping[str, tf.TensorShape],
- model_config: hyperparams.Config,
- l2_regularizer: Optional[tf.keras.regularizers.Regularizer] = None
-) -> tf.keras.Model:
- """Builds FPN decoder from a config.
-
- Args:
- input_specs: A `dict` of input specifications. A dictionary consists of
- {level: TensorShape} from a backbone.
- model_config: A OneOfConfig. Model config.
- l2_regularizer: A `tf.keras.regularizers.Regularizer` instance. Default to
- None.
-
- Returns:
- A `tf.keras.Model` instance of the FPN decoder.
-
- Raises:
- ValueError: If the model_config.decoder.type is not `fpn`.
- """
- decoder_type = model_config.decoder.type
- decoder_cfg = model_config.decoder.get()
- if decoder_type != 'fpn':
- raise ValueError(f'Inconsistent decoder type {decoder_type}. '
- 'Need to be `fpn`.')
- norm_activation_config = model_config.norm_activation
- return FPN(
- input_specs=input_specs,
- min_level=model_config.min_level,
- max_level=model_config.max_level,
- num_filters=decoder_cfg.num_filters,
- fusion_type=decoder_cfg.fusion_type,
- use_separable_conv=decoder_cfg.use_separable_conv,
- activation=norm_activation_config.activation,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon,
- kernel_regularizer=l2_regularizer)
diff --git a/official/vision/beta/modeling/decoders/fpn_test.py b/official/vision/beta/modeling/decoders/fpn_test.py
deleted file mode 100644
index 434dd93a9f95309b6f96c2d1d9677c86dfe6ee25..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/decoders/fpn_test.py
+++ /dev/null
@@ -1,117 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for FPN."""
-
-# Import libraries
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.vision.beta.modeling.backbones import mobilenet
-from official.vision.beta.modeling.backbones import resnet
-from official.vision.beta.modeling.decoders import fpn
-
-
-class FPNTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (256, 3, 7, False, 'sum'),
- (256, 3, 7, True, 'concat'),
- )
- def test_network_creation(self, input_size, min_level, max_level,
- use_separable_conv, fusion_type):
- """Test creation of FPN."""
- tf.keras.backend.set_image_data_format('channels_last')
-
- inputs = tf.keras.Input(shape=(input_size, input_size, 3), batch_size=1)
-
- backbone = resnet.ResNet(model_id=50)
- network = fpn.FPN(
- input_specs=backbone.output_specs,
- min_level=min_level,
- max_level=max_level,
- fusion_type=fusion_type,
- use_separable_conv=use_separable_conv)
-
- endpoints = backbone(inputs)
- feats = network(endpoints)
-
- for level in range(min_level, max_level + 1):
- self.assertIn(str(level), feats)
- self.assertAllEqual(
- [1, input_size // 2**level, input_size // 2**level, 256],
- feats[str(level)].shape.as_list())
-
- @parameterized.parameters(
- (256, 3, 7, False),
- (256, 3, 7, True),
- )
- def test_network_creation_with_mobilenet(self, input_size, min_level,
- max_level, use_separable_conv):
- """Test creation of FPN with mobilenet backbone."""
- tf.keras.backend.set_image_data_format('channels_last')
-
- inputs = tf.keras.Input(shape=(input_size, input_size, 3), batch_size=1)
-
- backbone = mobilenet.MobileNet(model_id='MobileNetV2')
- network = fpn.FPN(
- input_specs=backbone.output_specs,
- min_level=min_level,
- max_level=max_level,
- use_separable_conv=use_separable_conv)
-
- endpoints = backbone(inputs)
- feats = network(endpoints)
-
- for level in range(min_level, max_level + 1):
- self.assertIn(str(level), feats)
- self.assertAllEqual(
- [1, input_size // 2**level, input_size // 2**level, 256],
- feats[str(level)].shape.as_list())
-
- def test_serialize_deserialize(self):
- # Create a network object that sets all of its config options.
- kwargs = dict(
- input_specs=resnet.ResNet(model_id=50).output_specs,
- min_level=3,
- max_level=7,
- num_filters=256,
- fusion_type='sum',
- use_separable_conv=False,
- use_sync_bn=False,
- activation='relu',
- norm_momentum=0.99,
- norm_epsilon=0.001,
- kernel_initializer='VarianceScaling',
- kernel_regularizer=None,
- bias_regularizer=None,
- )
- network = fpn.FPN(**kwargs)
-
- expected_config = dict(kwargs)
- self.assertEqual(network.get_config(), expected_config)
-
- # Create another network object from the first object's config.
- new_network = fpn.FPN.from_config(network.get_config())
-
- # Validate that the config can be forced to JSON.
- _ = new_network.to_json()
-
- # If the serialization was successful, the new config should match the old.
- self.assertAllEqual(network.get_config(), new_network.get_config())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/decoders/nasfpn.py b/official/vision/beta/modeling/decoders/nasfpn.py
deleted file mode 100644
index 2f338eccb24e329aae116ce0d65f817ccf7f5a69..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/decoders/nasfpn.py
+++ /dev/null
@@ -1,368 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains definitions of NAS-FPN."""
-
-from typing import Any, List, Mapping, Optional, Tuple
-
-# Import libraries
-
-from absl import logging
-import tensorflow as tf
-
-from official.modeling import hyperparams
-from official.modeling import tf_utils
-from official.vision.beta.modeling.decoders import factory
-from official.vision.beta.ops import spatial_transform_ops
-
-
-# The fixed NAS-FPN architecture discovered by NAS.
-# Each element represents a specification of a building block:
-# (block_level, combine_fn, (input_offset0, input_offset1), is_output).
-NASFPN_BLOCK_SPECS = [
- (4, 'attention', (1, 3), False),
- (4, 'sum', (1, 5), False),
- (3, 'sum', (0, 6), True),
- (4, 'sum', (6, 7), True),
- (5, 'attention', (7, 8), True),
- (7, 'attention', (6, 9), True),
- (6, 'attention', (9, 10), True),
-]
-
-
-class BlockSpec():
- """A container class that specifies the block configuration for NAS-FPN."""
-
- def __init__(self, level: int, combine_fn: str,
- input_offsets: Tuple[int, int], is_output: bool):
- self.level = level
- self.combine_fn = combine_fn
- self.input_offsets = input_offsets
- self.is_output = is_output
-
-
-def build_block_specs(
- block_specs: Optional[List[Tuple[Any, ...]]] = None) -> List[BlockSpec]:
- """Builds the list of BlockSpec objects for NAS-FPN."""
- if not block_specs:
- block_specs = NASFPN_BLOCK_SPECS
- logging.info('Building NAS-FPN block specs: %s', block_specs)
- return [BlockSpec(*b) for b in block_specs]
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class NASFPN(tf.keras.Model):
- """Creates a NAS-FPN model.
-
- This implements the paper:
- Golnaz Ghiasi, Tsung-Yi Lin, Ruoming Pang, Quoc V. Le.
- NAS-FPN: Learning Scalable Feature Pyramid Architecture for Object Detection.
- (https://arxiv.org/abs/1904.07392)
- """
-
- def __init__(
- self,
- input_specs: Mapping[str, tf.TensorShape],
- min_level: int = 3,
- max_level: int = 7,
- block_specs: List[BlockSpec] = build_block_specs(),
- num_filters: int = 256,
- num_repeats: int = 5,
- use_separable_conv: bool = False,
- activation: str = 'relu',
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- kernel_initializer: str = 'VarianceScaling',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- **kwargs):
- """Initializes a NAS-FPN model.
-
- Args:
- input_specs: A `dict` of input specifications. A dictionary consists of
- {level: TensorShape} from a backbone.
- min_level: An `int` of minimum level in FPN output feature maps.
- max_level: An `int` of maximum level in FPN output feature maps.
- block_specs: a list of BlockSpec objects that specifies the NAS-FPN
- network topology. By default, the previously discovered architecture is
- used.
- num_filters: An `int` number of filters in FPN layers.
- num_repeats: number of repeats for feature pyramid network.
- use_separable_conv: A `bool`. If True use separable convolution for
- convolution in FPN layers.
- activation: A `str` name of the activation function.
- use_sync_bn: A `bool`. If True, use synchronized batch normalization.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- kernel_initializer: A `str` name of kernel_initializer for convolutional
- layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default is None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2D.
- **kwargs: Additional keyword arguments to be passed.
- """
- self._config_dict = {
- 'input_specs': input_specs,
- 'min_level': min_level,
- 'max_level': max_level,
- 'num_filters': num_filters,
- 'num_repeats': num_repeats,
- 'use_separable_conv': use_separable_conv,
- 'activation': activation,
- 'use_sync_bn': use_sync_bn,
- 'norm_momentum': norm_momentum,
- 'norm_epsilon': norm_epsilon,
- 'kernel_initializer': kernel_initializer,
- 'kernel_regularizer': kernel_regularizer,
- 'bias_regularizer': bias_regularizer,
- }
- self._min_level = min_level
- self._max_level = max_level
- self._block_specs = block_specs
- self._num_repeats = num_repeats
- self._conv_op = (tf.keras.layers.SeparableConv2D
- if self._config_dict['use_separable_conv']
- else tf.keras.layers.Conv2D)
- if self._config_dict['use_separable_conv']:
- self._conv_kwargs = {
- 'depthwise_initializer': tf.keras.initializers.VarianceScaling(
- scale=2, mode='fan_out', distribution='untruncated_normal'),
- 'pointwise_initializer': tf.keras.initializers.VarianceScaling(
- scale=2, mode='fan_out', distribution='untruncated_normal'),
- 'bias_initializer': tf.zeros_initializer(),
- 'depthwise_regularizer': self._config_dict['kernel_regularizer'],
- 'pointwise_regularizer': self._config_dict['kernel_regularizer'],
- 'bias_regularizer': self._config_dict['bias_regularizer'],
- }
- else:
- self._conv_kwargs = {
- 'kernel_initializer': tf.keras.initializers.VarianceScaling(
- scale=2, mode='fan_out', distribution='untruncated_normal'),
- 'bias_initializer': tf.zeros_initializer(),
- 'kernel_regularizer': self._config_dict['kernel_regularizer'],
- 'bias_regularizer': self._config_dict['bias_regularizer'],
- }
- self._norm_op = (tf.keras.layers.experimental.SyncBatchNormalization
- if self._config_dict['use_sync_bn']
- else tf.keras.layers.BatchNormalization)
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._bn_axis = -1
- else:
- self._bn_axis = 1
- self._norm_kwargs = {
- 'axis': self._bn_axis,
- 'momentum': self._config_dict['norm_momentum'],
- 'epsilon': self._config_dict['norm_epsilon'],
- }
- self._activation = tf_utils.get_activation(activation)
-
- # Gets input feature pyramid from backbone.
- inputs = self._build_input_pyramid(input_specs, min_level)
-
- # Projects the input features.
- feats = []
- for level in range(self._min_level, self._max_level + 1):
- if str(level) in inputs.keys():
- feats.append(self._resample_feature_map(
- inputs[str(level)], level, level, self._config_dict['num_filters']))
- else:
- feats.append(self._resample_feature_map(
- feats[-1], level - 1, level, self._config_dict['num_filters']))
-
- # Repeatly builds the NAS-FPN modules.
- for _ in range(self._num_repeats):
- output_feats = self._build_feature_pyramid(feats)
- feats = [output_feats[level]
- for level in range(self._min_level, self._max_level + 1)]
-
- self._output_specs = {
- str(level): output_feats[level].get_shape()
- for level in range(min_level, max_level + 1)
- }
- output_feats = {str(level): output_feats[level]
- for level in output_feats.keys()}
- super(NASFPN, self).__init__(inputs=inputs, outputs=output_feats, **kwargs)
-
- def _build_input_pyramid(self, input_specs: Mapping[str, tf.TensorShape],
- min_level: int):
- assert isinstance(input_specs, dict)
- if min(input_specs.keys()) > str(min_level):
- raise ValueError(
- 'Backbone min level should be less or equal to FPN min level')
-
- inputs = {}
- for level, spec in input_specs.items():
- inputs[level] = tf.keras.Input(shape=spec[1:])
- return inputs
-
- def _resample_feature_map(self,
- inputs,
- input_level,
- target_level,
- target_num_filters=256):
- x = inputs
- _, _, _, input_num_filters = x.get_shape().as_list()
- if input_num_filters != target_num_filters:
- x = self._conv_op(
- filters=target_num_filters,
- kernel_size=1,
- padding='same',
- **self._conv_kwargs)(x)
- x = self._norm_op(**self._norm_kwargs)(x)
-
- if input_level < target_level:
- stride = int(2 ** (target_level - input_level))
- return tf.keras.layers.MaxPool2D(
- pool_size=stride, strides=stride, padding='same')(x)
- if input_level > target_level:
- scale = int(2 ** (input_level - target_level))
- return spatial_transform_ops.nearest_upsampling(x, scale=scale)
-
- # Force output x to be the same dtype as mixed precision policy. This avoids
- # dtype mismatch when one input (by default float32 dtype) does not meet all
- # the above conditions and is output unchanged, while other inputs are
- # processed to have different dtype, e.g., using bfloat16 on TPU.
- compute_dtype = tf.keras.layers.Layer().dtype_policy.compute_dtype
- if (compute_dtype is not None) and (x.dtype != compute_dtype):
- return tf.cast(x, dtype=compute_dtype)
- else:
- return x
-
- def _global_attention(self, feat0, feat1):
- m = tf.math.reduce_max(feat0, axis=[1, 2], keepdims=True)
- m = tf.math.sigmoid(m)
- return feat0 + feat1 * m
-
- def _build_feature_pyramid(self, feats):
- num_output_connections = [0] * len(feats)
- num_output_levels = self._max_level - self._min_level + 1
- feat_levels = list(range(self._min_level, self._max_level + 1))
-
- for i, block_spec in enumerate(self._block_specs):
- new_level = block_spec.level
-
- # Checks the range of input_offsets.
- for input_offset in block_spec.input_offsets:
- if input_offset >= len(feats):
- raise ValueError(
- 'input_offset ({}) is larger than num feats({})'.format(
- input_offset, len(feats)))
- input0 = block_spec.input_offsets[0]
- input1 = block_spec.input_offsets[1]
-
- # Update graph with inputs.
- node0 = feats[input0]
- node0_level = feat_levels[input0]
- num_output_connections[input0] += 1
- node0 = self._resample_feature_map(node0, node0_level, new_level)
- node1 = feats[input1]
- node1_level = feat_levels[input1]
- num_output_connections[input1] += 1
- node1 = self._resample_feature_map(node1, node1_level, new_level)
-
- # Combine node0 and node1 to create new feat.
- if block_spec.combine_fn == 'sum':
- new_node = node0 + node1
- elif block_spec.combine_fn == 'attention':
- if node0_level >= node1_level:
- new_node = self._global_attention(node0, node1)
- else:
- new_node = self._global_attention(node1, node0)
- else:
- raise ValueError('unknown combine_fn `{}`.'
- .format(block_spec.combine_fn))
-
- # Add intermediate nodes that do not have any connections to output.
- if block_spec.is_output:
- for j, (feat, feat_level, num_output) in enumerate(
- zip(feats, feat_levels, num_output_connections)):
- if num_output == 0 and feat_level == new_level:
- num_output_connections[j] += 1
-
- feat_ = self._resample_feature_map(feat, feat_level, new_level)
- new_node += feat_
-
- new_node = self._activation(new_node)
- new_node = self._conv_op(
- filters=self._config_dict['num_filters'],
- kernel_size=(3, 3),
- padding='same',
- **self._conv_kwargs)(new_node)
- new_node = self._norm_op(**self._norm_kwargs)(new_node)
-
- feats.append(new_node)
- feat_levels.append(new_level)
- num_output_connections.append(0)
-
- output_feats = {}
- for i in range(len(feats) - num_output_levels, len(feats)):
- level = feat_levels[i]
- output_feats[level] = feats[i]
- logging.info('Output feature pyramid: %s', output_feats)
- return output_feats
-
- def get_config(self) -> Mapping[str, Any]:
- return self._config_dict
-
- @classmethod
- def from_config(cls, config, custom_objects=None):
- return cls(**config)
-
- @property
- def output_specs(self) -> Mapping[str, tf.TensorShape]:
- """A dict of {level: TensorShape} pairs for the model output."""
- return self._output_specs
-
-
-@factory.register_decoder_builder('nasfpn')
-def build_nasfpn_decoder(
- input_specs: Mapping[str, tf.TensorShape],
- model_config: hyperparams.Config,
- l2_regularizer: Optional[tf.keras.regularizers.Regularizer] = None
-) -> tf.keras.Model:
- """Builds NASFPN decoder from a config.
-
- Args:
- input_specs: A `dict` of input specifications. A dictionary consists of
- {level: TensorShape} from a backbone.
- model_config: A OneOfConfig. Model config.
- l2_regularizer: A `tf.keras.regularizers.Regularizer` instance. Default to
- None.
-
- Returns:
- A `tf.keras.Model` instance of the NASFPN decoder.
-
- Raises:
- ValueError: If the model_config.decoder.type is not `nasfpn`.
- """
- decoder_type = model_config.decoder.type
- decoder_cfg = model_config.decoder.get()
- if decoder_type != 'nasfpn':
- raise ValueError(f'Inconsistent decoder type {decoder_type}. '
- 'Need to be `nasfpn`.')
-
- norm_activation_config = model_config.norm_activation
- return NASFPN(
- input_specs=input_specs,
- min_level=model_config.min_level,
- max_level=model_config.max_level,
- num_filters=decoder_cfg.num_filters,
- num_repeats=decoder_cfg.num_repeats,
- use_separable_conv=decoder_cfg.use_separable_conv,
- activation=norm_activation_config.activation,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon,
- kernel_regularizer=l2_regularizer)
diff --git a/official/vision/beta/modeling/decoders/nasfpn_test.py b/official/vision/beta/modeling/decoders/nasfpn_test.py
deleted file mode 100644
index c27b4a2e73157d757a1c2f956880634710f41d2e..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/decoders/nasfpn_test.py
+++ /dev/null
@@ -1,59 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for NAS-FPN."""
-
-# Import libraries
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.vision.beta.modeling.backbones import resnet
-from official.vision.beta.modeling.decoders import nasfpn
-
-
-class NASFPNTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (256, 3, 7, False),
- (256, 3, 7, True),
- )
- def test_network_creation(self, input_size, min_level, max_level,
- use_separable_conv):
- """Test creation of NAS-FPN."""
- tf.keras.backend.set_image_data_format('channels_last')
-
- inputs = tf.keras.Input(shape=(input_size, input_size, 3), batch_size=1)
-
- num_filters = 256
- backbone = resnet.ResNet(model_id=50)
- network = nasfpn.NASFPN(
- input_specs=backbone.output_specs,
- min_level=min_level,
- max_level=max_level,
- num_filters=num_filters,
- use_separable_conv=use_separable_conv)
-
- endpoints = backbone(inputs)
- feats = network(endpoints)
-
- for level in range(min_level, max_level + 1):
- self.assertIn(str(level), feats)
- self.assertAllEqual(
- [1, input_size // 2**level, input_size // 2**level, num_filters],
- feats[str(level)].shape.as_list())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/factory.py b/official/vision/beta/modeling/factory.py
deleted file mode 100644
index 637e05865cf75eb92f899df4b067ebc93ab9cd20..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/factory.py
+++ /dev/null
@@ -1,385 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Factory methods to build models."""
-
-from typing import Optional
-
-import tensorflow as tf
-
-from official.vision.beta.configs import image_classification as classification_cfg
-from official.vision.beta.configs import maskrcnn as maskrcnn_cfg
-from official.vision.beta.configs import retinanet as retinanet_cfg
-from official.vision.beta.configs import semantic_segmentation as segmentation_cfg
-from official.vision.beta.modeling import backbones
-from official.vision.beta.modeling import classification_model
-from official.vision.beta.modeling import decoders
-from official.vision.beta.modeling import maskrcnn_model
-from official.vision.beta.modeling import retinanet_model
-from official.vision.beta.modeling import segmentation_model
-from official.vision.beta.modeling.heads import dense_prediction_heads
-from official.vision.beta.modeling.heads import instance_heads
-from official.vision.beta.modeling.heads import segmentation_heads
-from official.vision.beta.modeling.layers import detection_generator
-from official.vision.beta.modeling.layers import mask_sampler
-from official.vision.beta.modeling.layers import roi_aligner
-from official.vision.beta.modeling.layers import roi_generator
-from official.vision.beta.modeling.layers import roi_sampler
-
-
-def build_classification_model(
- input_specs: tf.keras.layers.InputSpec,
- model_config: classification_cfg.ImageClassificationModel,
- l2_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- skip_logits_layer: bool = False,
- backbone: Optional[tf.keras.Model] = None) -> tf.keras.Model:
- """Builds the classification model."""
- norm_activation_config = model_config.norm_activation
- if not backbone:
- backbone = backbones.factory.build_backbone(
- input_specs=input_specs,
- backbone_config=model_config.backbone,
- norm_activation_config=norm_activation_config,
- l2_regularizer=l2_regularizer)
-
- model = classification_model.ClassificationModel(
- backbone=backbone,
- num_classes=model_config.num_classes,
- input_specs=input_specs,
- dropout_rate=model_config.dropout_rate,
- kernel_initializer=model_config.kernel_initializer,
- kernel_regularizer=l2_regularizer,
- add_head_batch_norm=model_config.add_head_batch_norm,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon,
- skip_logits_layer=skip_logits_layer)
- return model
-
-
-def build_maskrcnn(input_specs: tf.keras.layers.InputSpec,
- model_config: maskrcnn_cfg.MaskRCNN,
- l2_regularizer: Optional[
- tf.keras.regularizers.Regularizer] = None,
- backbone: Optional[tf.keras.Model] = None,
- decoder: Optional[tf.keras.Model] = None) -> tf.keras.Model:
- """Builds Mask R-CNN model."""
- norm_activation_config = model_config.norm_activation
- if not backbone:
- backbone = backbones.factory.build_backbone(
- input_specs=input_specs,
- backbone_config=model_config.backbone,
- norm_activation_config=norm_activation_config,
- l2_regularizer=l2_regularizer)
- backbone_features = backbone(tf.keras.Input(input_specs.shape[1:]))
-
- if not decoder:
- decoder = decoders.factory.build_decoder(
- input_specs=backbone.output_specs,
- model_config=model_config,
- l2_regularizer=l2_regularizer)
-
- rpn_head_config = model_config.rpn_head
- roi_generator_config = model_config.roi_generator
- roi_sampler_config = model_config.roi_sampler
- roi_aligner_config = model_config.roi_aligner
- detection_head_config = model_config.detection_head
- generator_config = model_config.detection_generator
- num_anchors_per_location = (
- len(model_config.anchor.aspect_ratios) * model_config.anchor.num_scales)
-
- rpn_head = dense_prediction_heads.RPNHead(
- min_level=model_config.min_level,
- max_level=model_config.max_level,
- num_anchors_per_location=num_anchors_per_location,
- num_convs=rpn_head_config.num_convs,
- num_filters=rpn_head_config.num_filters,
- use_separable_conv=rpn_head_config.use_separable_conv,
- activation=norm_activation_config.activation,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon,
- kernel_regularizer=l2_regularizer)
-
- detection_head = instance_heads.DetectionHead(
- num_classes=model_config.num_classes,
- num_convs=detection_head_config.num_convs,
- num_filters=detection_head_config.num_filters,
- use_separable_conv=detection_head_config.use_separable_conv,
- num_fcs=detection_head_config.num_fcs,
- fc_dims=detection_head_config.fc_dims,
- class_agnostic_bbox_pred=detection_head_config.class_agnostic_bbox_pred,
- activation=norm_activation_config.activation,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon,
- kernel_regularizer=l2_regularizer,
- name='detection_head')
-
- if decoder:
- decoder_features = decoder(backbone_features)
- rpn_head(decoder_features)
-
- if roi_sampler_config.cascade_iou_thresholds:
- detection_head_cascade = [detection_head]
- for cascade_num in range(len(roi_sampler_config.cascade_iou_thresholds)):
- detection_head = instance_heads.DetectionHead(
- num_classes=model_config.num_classes,
- num_convs=detection_head_config.num_convs,
- num_filters=detection_head_config.num_filters,
- use_separable_conv=detection_head_config.use_separable_conv,
- num_fcs=detection_head_config.num_fcs,
- fc_dims=detection_head_config.fc_dims,
- class_agnostic_bbox_pred=detection_head_config
- .class_agnostic_bbox_pred,
- activation=norm_activation_config.activation,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon,
- kernel_regularizer=l2_regularizer,
- name='detection_head_{}'.format(cascade_num + 1))
-
- detection_head_cascade.append(detection_head)
- detection_head = detection_head_cascade
-
- roi_generator_obj = roi_generator.MultilevelROIGenerator(
- pre_nms_top_k=roi_generator_config.pre_nms_top_k,
- pre_nms_score_threshold=roi_generator_config.pre_nms_score_threshold,
- pre_nms_min_size_threshold=(
- roi_generator_config.pre_nms_min_size_threshold),
- nms_iou_threshold=roi_generator_config.nms_iou_threshold,
- num_proposals=roi_generator_config.num_proposals,
- test_pre_nms_top_k=roi_generator_config.test_pre_nms_top_k,
- test_pre_nms_score_threshold=(
- roi_generator_config.test_pre_nms_score_threshold),
- test_pre_nms_min_size_threshold=(
- roi_generator_config.test_pre_nms_min_size_threshold),
- test_nms_iou_threshold=roi_generator_config.test_nms_iou_threshold,
- test_num_proposals=roi_generator_config.test_num_proposals,
- use_batched_nms=roi_generator_config.use_batched_nms)
-
- roi_sampler_cascade = []
- roi_sampler_obj = roi_sampler.ROISampler(
- mix_gt_boxes=roi_sampler_config.mix_gt_boxes,
- num_sampled_rois=roi_sampler_config.num_sampled_rois,
- foreground_fraction=roi_sampler_config.foreground_fraction,
- foreground_iou_threshold=roi_sampler_config.foreground_iou_threshold,
- background_iou_high_threshold=(
- roi_sampler_config.background_iou_high_threshold),
- background_iou_low_threshold=(
- roi_sampler_config.background_iou_low_threshold))
- roi_sampler_cascade.append(roi_sampler_obj)
- # Initialize addtional roi simplers for cascade heads.
- if roi_sampler_config.cascade_iou_thresholds:
- for iou in roi_sampler_config.cascade_iou_thresholds:
- roi_sampler_obj = roi_sampler.ROISampler(
- mix_gt_boxes=False,
- num_sampled_rois=roi_sampler_config.num_sampled_rois,
- foreground_iou_threshold=iou,
- background_iou_high_threshold=iou,
- background_iou_low_threshold=0.0,
- skip_subsampling=True)
- roi_sampler_cascade.append(roi_sampler_obj)
-
- roi_aligner_obj = roi_aligner.MultilevelROIAligner(
- crop_size=roi_aligner_config.crop_size,
- sample_offset=roi_aligner_config.sample_offset)
-
- detection_generator_obj = detection_generator.DetectionGenerator(
- apply_nms=generator_config.apply_nms,
- pre_nms_top_k=generator_config.pre_nms_top_k,
- pre_nms_score_threshold=generator_config.pre_nms_score_threshold,
- nms_iou_threshold=generator_config.nms_iou_threshold,
- max_num_detections=generator_config.max_num_detections,
- nms_version=generator_config.nms_version,
- use_cpu_nms=generator_config.use_cpu_nms,
- soft_nms_sigma=generator_config.soft_nms_sigma)
-
- if model_config.include_mask:
- mask_head = instance_heads.MaskHead(
- num_classes=model_config.num_classes,
- upsample_factor=model_config.mask_head.upsample_factor,
- num_convs=model_config.mask_head.num_convs,
- num_filters=model_config.mask_head.num_filters,
- use_separable_conv=model_config.mask_head.use_separable_conv,
- activation=model_config.norm_activation.activation,
- norm_momentum=model_config.norm_activation.norm_momentum,
- norm_epsilon=model_config.norm_activation.norm_epsilon,
- kernel_regularizer=l2_regularizer,
- class_agnostic=model_config.mask_head.class_agnostic)
-
- mask_sampler_obj = mask_sampler.MaskSampler(
- mask_target_size=(
- model_config.mask_roi_aligner.crop_size *
- model_config.mask_head.upsample_factor),
- num_sampled_masks=model_config.mask_sampler.num_sampled_masks)
-
- mask_roi_aligner_obj = roi_aligner.MultilevelROIAligner(
- crop_size=model_config.mask_roi_aligner.crop_size,
- sample_offset=model_config.mask_roi_aligner.sample_offset)
- else:
- mask_head = None
- mask_sampler_obj = None
- mask_roi_aligner_obj = None
-
- model = maskrcnn_model.MaskRCNNModel(
- backbone=backbone,
- decoder=decoder,
- rpn_head=rpn_head,
- detection_head=detection_head,
- roi_generator=roi_generator_obj,
- roi_sampler=roi_sampler_cascade,
- roi_aligner=roi_aligner_obj,
- detection_generator=detection_generator_obj,
- mask_head=mask_head,
- mask_sampler=mask_sampler_obj,
- mask_roi_aligner=mask_roi_aligner_obj,
- class_agnostic_bbox_pred=detection_head_config.class_agnostic_bbox_pred,
- cascade_class_ensemble=detection_head_config.cascade_class_ensemble,
- min_level=model_config.min_level,
- max_level=model_config.max_level,
- num_scales=model_config.anchor.num_scales,
- aspect_ratios=model_config.anchor.aspect_ratios,
- anchor_size=model_config.anchor.anchor_size)
- return model
-
-
-def build_retinanet(
- input_specs: tf.keras.layers.InputSpec,
- model_config: retinanet_cfg.RetinaNet,
- l2_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- backbone: Optional[tf.keras.Model] = None,
- decoder: Optional[tf.keras.regularizers.Regularizer] = None
-) -> tf.keras.Model:
- """Builds RetinaNet model."""
- norm_activation_config = model_config.norm_activation
- if not backbone:
- backbone = backbones.factory.build_backbone(
- input_specs=input_specs,
- backbone_config=model_config.backbone,
- norm_activation_config=norm_activation_config,
- l2_regularizer=l2_regularizer)
- backbone_features = backbone(tf.keras.Input(input_specs.shape[1:]))
-
- if not decoder:
- decoder = decoders.factory.build_decoder(
- input_specs=backbone.output_specs,
- model_config=model_config,
- l2_regularizer=l2_regularizer)
-
- head_config = model_config.head
- generator_config = model_config.detection_generator
- num_anchors_per_location = (
- len(model_config.anchor.aspect_ratios) * model_config.anchor.num_scales)
-
- head = dense_prediction_heads.RetinaNetHead(
- min_level=model_config.min_level,
- max_level=model_config.max_level,
- num_classes=model_config.num_classes,
- num_anchors_per_location=num_anchors_per_location,
- num_convs=head_config.num_convs,
- num_filters=head_config.num_filters,
- attribute_heads=[
- cfg.as_dict() for cfg in (head_config.attribute_heads or [])
- ],
- use_separable_conv=head_config.use_separable_conv,
- activation=norm_activation_config.activation,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon,
- kernel_regularizer=l2_regularizer)
-
- # Builds decoder and head so that their trainable weights are initialized
- if decoder:
- decoder_features = decoder(backbone_features)
- _ = head(decoder_features)
-
- detection_generator_obj = detection_generator.MultilevelDetectionGenerator(
- apply_nms=generator_config.apply_nms,
- pre_nms_top_k=generator_config.pre_nms_top_k,
- pre_nms_score_threshold=generator_config.pre_nms_score_threshold,
- nms_iou_threshold=generator_config.nms_iou_threshold,
- max_num_detections=generator_config.max_num_detections,
- nms_version=generator_config.nms_version,
- use_cpu_nms=generator_config.use_cpu_nms,
- soft_nms_sigma=generator_config.soft_nms_sigma)
-
- model = retinanet_model.RetinaNetModel(
- backbone,
- decoder,
- head,
- detection_generator_obj,
- min_level=model_config.min_level,
- max_level=model_config.max_level,
- num_scales=model_config.anchor.num_scales,
- aspect_ratios=model_config.anchor.aspect_ratios,
- anchor_size=model_config.anchor.anchor_size)
- return model
-
-
-def build_segmentation_model(
- input_specs: tf.keras.layers.InputSpec,
- model_config: segmentation_cfg.SemanticSegmentationModel,
- l2_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- backbone: Optional[tf.keras.regularizers.Regularizer] = None,
- decoder: Optional[tf.keras.regularizers.Regularizer] = None
-) -> tf.keras.Model:
- """Builds Segmentation model."""
- norm_activation_config = model_config.norm_activation
- if not backbone:
- backbone = backbones.factory.build_backbone(
- input_specs=input_specs,
- backbone_config=model_config.backbone,
- norm_activation_config=norm_activation_config,
- l2_regularizer=l2_regularizer)
-
- if not decoder:
- decoder = decoders.factory.build_decoder(
- input_specs=backbone.output_specs,
- model_config=model_config,
- l2_regularizer=l2_regularizer)
-
- head_config = model_config.head
-
- head = segmentation_heads.SegmentationHead(
- num_classes=model_config.num_classes,
- level=head_config.level,
- num_convs=head_config.num_convs,
- prediction_kernel_size=head_config.prediction_kernel_size,
- num_filters=head_config.num_filters,
- use_depthwise_convolution=head_config.use_depthwise_convolution,
- upsample_factor=head_config.upsample_factor,
- feature_fusion=head_config.feature_fusion,
- low_level=head_config.low_level,
- low_level_num_filters=head_config.low_level_num_filters,
- activation=norm_activation_config.activation,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon,
- kernel_regularizer=l2_regularizer)
-
- mask_scoring_head = None
- if model_config.mask_scoring_head:
- mask_scoring_head = segmentation_heads.MaskScoring(
- num_classes=model_config.num_classes,
- **model_config.mask_scoring_head.as_dict(),
- activation=norm_activation_config.activation,
- use_sync_bn=norm_activation_config.use_sync_bn,
- norm_momentum=norm_activation_config.norm_momentum,
- norm_epsilon=norm_activation_config.norm_epsilon,
- kernel_regularizer=l2_regularizer)
-
- model = segmentation_model.SegmentationModel(
- backbone, decoder, head, mask_scoring_head=mask_scoring_head)
- return model
diff --git a/official/vision/beta/modeling/factory_3d.py b/official/vision/beta/modeling/factory_3d.py
deleted file mode 100644
index b68bdd6c01bfac851fb3c40303e35194f2e72266..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/factory_3d.py
+++ /dev/null
@@ -1,103 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Factory methods to build models."""
-
-# Import libraries
-import tensorflow as tf
-
-from official.core import registry
-from official.vision.beta.configs import video_classification as video_classification_cfg
-from official.vision.beta.modeling import video_classification_model
-from official.vision.beta.modeling import backbones
-
-_REGISTERED_MODEL_CLS = {}
-
-
-def register_model_builder(key: str):
- """Decorates a builder of model class.
-
- The builder should be a Callable (a class or a function).
- This decorator supports registration of backbone builder as follows:
-
- ```
- class MyModel(tf.keras.Model):
- pass
-
- @register_backbone_builder('mybackbone')
- def builder(input_specs, config, l2_reg):
- return MyModel(...)
-
- # Builds a MyModel object.
- my_backbone = build_backbone_3d(input_specs, config, l2_reg)
- ```
-
- Args:
- key: the key to look up the builder.
-
- Returns:
- A callable for use as class decorator that registers the decorated class
- for creation from an instance of model class.
- """
- return registry.register(_REGISTERED_MODEL_CLS, key)
-
-
-def build_model(
- model_type: str,
- input_specs: tf.keras.layers.InputSpec,
- model_config: video_classification_cfg.hyperparams.Config,
- num_classes: int,
- l2_regularizer: tf.keras.regularizers.Regularizer = None) -> tf.keras.Model:
- """Builds backbone from a config.
-
- Args:
- model_type: string name of model type. It should be consistent with
- ModelConfig.model_type.
- input_specs: tf.keras.layers.InputSpec.
- model_config: a OneOfConfig. Model config.
- num_classes: number of classes.
- l2_regularizer: tf.keras.regularizers.Regularizer instance. Default to None.
-
- Returns:
- tf.keras.Model instance of the backbone.
- """
- model_builder = registry.lookup(_REGISTERED_MODEL_CLS, model_type)
-
- return model_builder(input_specs, model_config, num_classes, l2_regularizer)
-
-
-@register_model_builder('video_classification')
-def build_video_classification_model(
- input_specs: tf.keras.layers.InputSpec,
- model_config: video_classification_cfg.VideoClassificationModel,
- num_classes: int,
- l2_regularizer: tf.keras.regularizers.Regularizer = None) -> tf.keras.Model:
- """Builds the video classification model."""
- input_specs_dict = {'image': input_specs}
- norm_activation_config = model_config.norm_activation
- backbone = backbones.factory.build_backbone(
- input_specs=input_specs,
- backbone_config=model_config.backbone,
- norm_activation_config=norm_activation_config,
- l2_regularizer=l2_regularizer)
-
- model = video_classification_model.VideoClassificationModel(
- backbone=backbone,
- num_classes=num_classes,
- input_specs=input_specs_dict,
- dropout_rate=model_config.dropout_rate,
- aggregate_endpoints=model_config.aggregate_endpoints,
- kernel_regularizer=l2_regularizer,
- require_endpoints=model_config.require_endpoints)
- return model
diff --git a/official/vision/beta/modeling/factory_test.py b/official/vision/beta/modeling/factory_test.py
deleted file mode 100644
index ce0ab9958be62f441ec3fd117b1e11ecac9cb756..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/factory_test.py
+++ /dev/null
@@ -1,132 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for factory.py."""
-
-# Import libraries
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.vision.beta.configs import backbones
-from official.vision.beta.configs import backbones_3d
-from official.vision.beta.configs import image_classification as classification_cfg
-from official.vision.beta.configs import maskrcnn as maskrcnn_cfg
-from official.vision.beta.configs import retinanet as retinanet_cfg
-from official.vision.beta.configs import video_classification as video_classification_cfg
-from official.vision.beta.modeling import factory
-from official.vision.beta.modeling import factory_3d
-
-
-class ClassificationModelBuilderTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- ('resnet', (224, 224), 5e-5),
- ('resnet', (224, 224), None),
- ('resnet', (None, None), 5e-5),
- ('resnet', (None, None), None),
- )
- def test_builder(self, backbone_type, input_size, weight_decay):
- num_classes = 2
- input_specs = tf.keras.layers.InputSpec(
- shape=[None, input_size[0], input_size[1], 3])
- model_config = classification_cfg.ImageClassificationModel(
- num_classes=num_classes,
- backbone=backbones.Backbone(type=backbone_type))
- l2_regularizer = (
- tf.keras.regularizers.l2(weight_decay) if weight_decay else None)
- _ = factory.build_classification_model(
- input_specs=input_specs,
- model_config=model_config,
- l2_regularizer=l2_regularizer)
-
-
-class MaskRCNNBuilderTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- ('resnet', (640, 640)),
- ('resnet', (None, None)),
- )
- def test_builder(self, backbone_type, input_size):
- num_classes = 2
- input_specs = tf.keras.layers.InputSpec(
- shape=[None, input_size[0], input_size[1], 3])
- model_config = maskrcnn_cfg.MaskRCNN(
- num_classes=num_classes,
- backbone=backbones.Backbone(type=backbone_type))
- l2_regularizer = tf.keras.regularizers.l2(5e-5)
- _ = factory.build_maskrcnn(
- input_specs=input_specs,
- model_config=model_config,
- l2_regularizer=l2_regularizer)
-
-
-class RetinaNetBuilderTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- ('resnet', (640, 640), False),
- ('resnet', (None, None), True),
- )
- def test_builder(self, backbone_type, input_size, has_att_heads):
- num_classes = 2
- input_specs = tf.keras.layers.InputSpec(
- shape=[None, input_size[0], input_size[1], 3])
- if has_att_heads:
- attribute_heads_config = [
- retinanet_cfg.AttributeHead(name='att1'),
- retinanet_cfg.AttributeHead(
- name='att2', type='classification', size=2),
- ]
- else:
- attribute_heads_config = None
- model_config = retinanet_cfg.RetinaNet(
- num_classes=num_classes,
- backbone=backbones.Backbone(type=backbone_type),
- head=retinanet_cfg.RetinaNetHead(
- attribute_heads=attribute_heads_config))
- l2_regularizer = tf.keras.regularizers.l2(5e-5)
- _ = factory.build_retinanet(
- input_specs=input_specs,
- model_config=model_config,
- l2_regularizer=l2_regularizer)
- if has_att_heads:
- self.assertEqual(model_config.head.attribute_heads[0].as_dict(),
- dict(name='att1', type='regression', size=1))
- self.assertEqual(model_config.head.attribute_heads[1].as_dict(),
- dict(name='att2', type='classification', size=2))
-
-
-class VideoClassificationModelBuilderTest(parameterized.TestCase,
- tf.test.TestCase):
-
- @parameterized.parameters(
- ('resnet_3d', (8, 224, 224), 5e-5),
- ('resnet_3d', (None, None, None), 5e-5),
- )
- def test_builder(self, backbone_type, input_size, weight_decay):
- input_specs = tf.keras.layers.InputSpec(
- shape=[None, input_size[0], input_size[1], input_size[2], 3])
- model_config = video_classification_cfg.VideoClassificationModel(
- backbone=backbones_3d.Backbone3D(type=backbone_type))
- l2_regularizer = (
- tf.keras.regularizers.l2(weight_decay) if weight_decay else None)
- _ = factory_3d.build_video_classification_model(
- input_specs=input_specs,
- model_config=model_config,
- num_classes=2,
- l2_regularizer=l2_regularizer)
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/heads/__init__.py b/official/vision/beta/modeling/heads/__init__.py
deleted file mode 100644
index 0157c05c983fa6124ac49bd8e6b4494519e28727..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/heads/__init__.py
+++ /dev/null
@@ -1,22 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Heads package definition."""
-
-from official.vision.beta.modeling.heads.dense_prediction_heads import RetinaNetHead
-from official.vision.beta.modeling.heads.dense_prediction_heads import RPNHead
-from official.vision.beta.modeling.heads.instance_heads import DetectionHead
-from official.vision.beta.modeling.heads.instance_heads import MaskHead
-from official.vision.beta.modeling.heads.segmentation_heads import SegmentationHead
diff --git a/official/vision/beta/modeling/heads/dense_prediction_heads.py b/official/vision/beta/modeling/heads/dense_prediction_heads.py
deleted file mode 100644
index e3acbb591f0d6e73c2e9d1b651138b1c7bbe6f79..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/heads/dense_prediction_heads.py
+++ /dev/null
@@ -1,517 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains definitions of dense prediction heads."""
-
-from typing import Any, Dict, List, Mapping, Optional, Union
-
-# Import libraries
-
-import numpy as np
-import tensorflow as tf
-
-from official.modeling import tf_utils
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class RetinaNetHead(tf.keras.layers.Layer):
- """Creates a RetinaNet head."""
-
- def __init__(
- self,
- min_level: int,
- max_level: int,
- num_classes: int,
- num_anchors_per_location: int,
- num_convs: int = 4,
- num_filters: int = 256,
- attribute_heads: Optional[List[Dict[str, Any]]] = None,
- use_separable_conv: bool = False,
- activation: str = 'relu',
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- num_params_per_anchor: int = 4,
- **kwargs):
- """Initializes a RetinaNet head.
-
- Args:
- min_level: An `int` number of minimum feature level.
- max_level: An `int` number of maximum feature level.
- num_classes: An `int` number of classes to predict.
- num_anchors_per_location: An `int` number of number of anchors per pixel
- location.
- num_convs: An `int` number that represents the number of the intermediate
- conv layers before the prediction.
- num_filters: An `int` number that represents the number of filters of the
- intermediate conv layers.
- attribute_heads: If not None, a list that contains a dict for each
- additional attribute head. Each dict consists of 3 key-value pairs:
- `name`, `type` ('regression' or 'classification'), and `size` (number
- of predicted values for each instance).
- use_separable_conv: A `bool` that indicates whether the separable
- convolution layers is used.
- activation: A `str` that indicates which activation is used, e.g. 'relu',
- 'swish', etc.
- use_sync_bn: A `bool` that indicates whether to use synchronized batch
- normalization across different replicas.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default is None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2D.
- num_params_per_anchor: Number of parameters required to specify an anchor
- box. For example, `num_params_per_anchor` would be 4 for axis-aligned
- anchor boxes specified by their y-centers, x-centers, heights, and
- widths.
- **kwargs: Additional keyword arguments to be passed.
- """
- super(RetinaNetHead, self).__init__(**kwargs)
- self._config_dict = {
- 'min_level': min_level,
- 'max_level': max_level,
- 'num_classes': num_classes,
- 'num_anchors_per_location': num_anchors_per_location,
- 'num_convs': num_convs,
- 'num_filters': num_filters,
- 'attribute_heads': attribute_heads,
- 'use_separable_conv': use_separable_conv,
- 'activation': activation,
- 'use_sync_bn': use_sync_bn,
- 'norm_momentum': norm_momentum,
- 'norm_epsilon': norm_epsilon,
- 'kernel_regularizer': kernel_regularizer,
- 'bias_regularizer': bias_regularizer,
- 'num_params_per_anchor': num_params_per_anchor,
- }
-
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._bn_axis = -1
- else:
- self._bn_axis = 1
- self._activation = tf_utils.get_activation(activation)
-
- def build(self, input_shape: Union[tf.TensorShape, List[tf.TensorShape]]):
- """Creates the variables of the head."""
- conv_op = (tf.keras.layers.SeparableConv2D
- if self._config_dict['use_separable_conv']
- else tf.keras.layers.Conv2D)
- conv_kwargs = {
- 'filters': self._config_dict['num_filters'],
- 'kernel_size': 3,
- 'padding': 'same',
- 'bias_initializer': tf.zeros_initializer(),
- 'bias_regularizer': self._config_dict['bias_regularizer'],
- }
- if not self._config_dict['use_separable_conv']:
- conv_kwargs.update({
- 'kernel_initializer': tf.keras.initializers.RandomNormal(
- stddev=0.01),
- 'kernel_regularizer': self._config_dict['kernel_regularizer'],
- })
- bn_op = (tf.keras.layers.experimental.SyncBatchNormalization
- if self._config_dict['use_sync_bn']
- else tf.keras.layers.BatchNormalization)
- bn_kwargs = {
- 'axis': self._bn_axis,
- 'momentum': self._config_dict['norm_momentum'],
- 'epsilon': self._config_dict['norm_epsilon'],
- }
-
- # Class net.
- self._cls_convs = []
- self._cls_norms = []
- for level in range(
- self._config_dict['min_level'], self._config_dict['max_level'] + 1):
- this_level_cls_norms = []
- for i in range(self._config_dict['num_convs']):
- if level == self._config_dict['min_level']:
- cls_conv_name = 'classnet-conv_{}'.format(i)
- self._cls_convs.append(conv_op(name=cls_conv_name, **conv_kwargs))
- cls_norm_name = 'classnet-conv-norm_{}_{}'.format(level, i)
- this_level_cls_norms.append(bn_op(name=cls_norm_name, **bn_kwargs))
- self._cls_norms.append(this_level_cls_norms)
-
- classifier_kwargs = {
- 'filters': (
- self._config_dict['num_classes'] *
- self._config_dict['num_anchors_per_location']),
- 'kernel_size': 3,
- 'padding': 'same',
- 'bias_initializer': tf.constant_initializer(-np.log((1 - 0.01) / 0.01)),
- 'bias_regularizer': self._config_dict['bias_regularizer'],
- }
- if not self._config_dict['use_separable_conv']:
- classifier_kwargs.update({
- 'kernel_initializer': tf.keras.initializers.RandomNormal(stddev=1e-5),
- 'kernel_regularizer': self._config_dict['kernel_regularizer'],
- })
- self._classifier = conv_op(name='scores', **classifier_kwargs)
-
- # Box net.
- self._box_convs = []
- self._box_norms = []
- for level in range(
- self._config_dict['min_level'], self._config_dict['max_level'] + 1):
- this_level_box_norms = []
- for i in range(self._config_dict['num_convs']):
- if level == self._config_dict['min_level']:
- box_conv_name = 'boxnet-conv_{}'.format(i)
- self._box_convs.append(conv_op(name=box_conv_name, **conv_kwargs))
- box_norm_name = 'boxnet-conv-norm_{}_{}'.format(level, i)
- this_level_box_norms.append(bn_op(name=box_norm_name, **bn_kwargs))
- self._box_norms.append(this_level_box_norms)
-
- box_regressor_kwargs = {
- 'filters': (self._config_dict['num_params_per_anchor'] *
- self._config_dict['num_anchors_per_location']),
- 'kernel_size': 3,
- 'padding': 'same',
- 'bias_initializer': tf.zeros_initializer(),
- 'bias_regularizer': self._config_dict['bias_regularizer'],
- }
- if not self._config_dict['use_separable_conv']:
- box_regressor_kwargs.update({
- 'kernel_initializer': tf.keras.initializers.RandomNormal(
- stddev=1e-5),
- 'kernel_regularizer': self._config_dict['kernel_regularizer'],
- })
- self._box_regressor = conv_op(name='boxes', **box_regressor_kwargs)
-
- # Attribute learning nets.
- if self._config_dict['attribute_heads']:
- self._att_predictors = {}
- self._att_convs = {}
- self._att_norms = {}
-
- for att_config in self._config_dict['attribute_heads']:
- att_name = att_config['name']
- att_type = att_config['type']
- att_size = att_config['size']
- att_convs_i = []
- att_norms_i = []
-
- # Build conv and norm layers.
- for level in range(self._config_dict['min_level'],
- self._config_dict['max_level'] + 1):
- this_level_att_norms = []
- for i in range(self._config_dict['num_convs']):
- if level == self._config_dict['min_level']:
- att_conv_name = '{}-conv_{}'.format(att_name, i)
- att_convs_i.append(conv_op(name=att_conv_name, **conv_kwargs))
- att_norm_name = '{}-conv-norm_{}_{}'.format(att_name, level, i)
- this_level_att_norms.append(bn_op(name=att_norm_name, **bn_kwargs))
- att_norms_i.append(this_level_att_norms)
- self._att_convs[att_name] = att_convs_i
- self._att_norms[att_name] = att_norms_i
-
- # Build the final prediction layer.
- att_predictor_kwargs = {
- 'filters':
- (att_size * self._config_dict['num_anchors_per_location']),
- 'kernel_size': 3,
- 'padding': 'same',
- 'bias_initializer': tf.zeros_initializer(),
- 'bias_regularizer': self._config_dict['bias_regularizer'],
- }
- if att_type == 'regression':
- att_predictor_kwargs.update(
- {'bias_initializer': tf.zeros_initializer()})
- elif att_type == 'classification':
- att_predictor_kwargs.update({
- 'bias_initializer':
- tf.constant_initializer(-np.log((1 - 0.01) / 0.01))
- })
- else:
- raise ValueError(
- 'Attribute head type {} not supported.'.format(att_type))
-
- if not self._config_dict['use_separable_conv']:
- att_predictor_kwargs.update({
- 'kernel_initializer':
- tf.keras.initializers.RandomNormal(stddev=1e-5),
- 'kernel_regularizer':
- self._config_dict['kernel_regularizer'],
- })
-
- self._att_predictors[att_name] = conv_op(
- name='{}_attributes'.format(att_name), **att_predictor_kwargs)
-
- super(RetinaNetHead, self).build(input_shape)
-
- def call(self, features: Mapping[str, tf.Tensor]):
- """Forward pass of the RetinaNet head.
-
- Args:
- features: A `dict` of `tf.Tensor` where
- - key: A `str` of the level of the multilevel features.
- - values: A `tf.Tensor`, the feature map tensors, whose shape is
- [batch, height_l, width_l, channels].
-
- Returns:
- scores: A `dict` of `tf.Tensor` which includes scores of the predictions.
- - key: A `str` of the level of the multilevel predictions.
- - values: A `tf.Tensor` of the box scores predicted from a particular
- feature level, whose shape is
- [batch, height_l, width_l, num_classes * num_anchors_per_location].
- boxes: A `dict` of `tf.Tensor` which includes coordinates of the
- predictions.
- - key: A `str` of the level of the multilevel predictions.
- - values: A `tf.Tensor` of the box scores predicted from a particular
- feature level, whose shape is
- [batch, height_l, width_l,
- num_params_per_anchor * num_anchors_per_location].
- attributes: a dict of (attribute_name, attribute_prediction). Each
- `attribute_prediction` is a dict of:
- - key: `str`, the level of the multilevel predictions.
- - values: `Tensor`, the box scores predicted from a particular feature
- level, whose shape is
- [batch, height_l, width_l,
- attribute_size * num_anchors_per_location].
- Can be an empty dictionary if no attribute learning is required.
- """
- scores = {}
- boxes = {}
- if self._config_dict['attribute_heads']:
- attributes = {
- att_config['name']: {}
- for att_config in self._config_dict['attribute_heads']
- }
- else:
- attributes = {}
-
- for i, level in enumerate(
- range(self._config_dict['min_level'],
- self._config_dict['max_level'] + 1)):
- this_level_features = features[str(level)]
-
- # class net.
- x = this_level_features
- for conv, norm in zip(self._cls_convs, self._cls_norms[i]):
- x = conv(x)
- x = norm(x)
- x = self._activation(x)
- scores[str(level)] = self._classifier(x)
-
- # box net.
- x = this_level_features
- for conv, norm in zip(self._box_convs, self._box_norms[i]):
- x = conv(x)
- x = norm(x)
- x = self._activation(x)
- boxes[str(level)] = self._box_regressor(x)
-
- # attribute nets.
- if self._config_dict['attribute_heads']:
- for att_config in self._config_dict['attribute_heads']:
- att_name = att_config['name']
- x = this_level_features
- for conv, norm in zip(self._att_convs[att_name],
- self._att_norms[att_name][i]):
- x = conv(x)
- x = norm(x)
- x = self._activation(x)
- attributes[att_name][str(level)] = self._att_predictors[att_name](x)
-
- return scores, boxes, attributes
-
- def get_config(self):
- return self._config_dict
-
- @classmethod
- def from_config(cls, config):
- return cls(**config)
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class RPNHead(tf.keras.layers.Layer):
- """Creates a Region Proposal Network (RPN) head."""
-
- def __init__(
- self,
- min_level: int,
- max_level: int,
- num_anchors_per_location: int,
- num_convs: int = 1,
- num_filters: int = 256,
- use_separable_conv: bool = False,
- activation: str = 'relu',
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- **kwargs):
- """Initializes a Region Proposal Network head.
-
- Args:
- min_level: An `int` number of minimum feature level.
- max_level: An `int` number of maximum feature level.
- num_anchors_per_location: An `int` number of number of anchors per pixel
- location.
- num_convs: An `int` number that represents the number of the intermediate
- convolution layers before the prediction.
- num_filters: An `int` number that represents the number of filters of the
- intermediate convolution layers.
- use_separable_conv: A `bool` that indicates whether the separable
- convolution layers is used.
- activation: A `str` that indicates which activation is used, e.g. 'relu',
- 'swish', etc.
- use_sync_bn: A `bool` that indicates whether to use synchronized batch
- normalization across different replicas.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default is None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2D.
- **kwargs: Additional keyword arguments to be passed.
- """
- super(RPNHead, self).__init__(**kwargs)
- self._config_dict = {
- 'min_level': min_level,
- 'max_level': max_level,
- 'num_anchors_per_location': num_anchors_per_location,
- 'num_convs': num_convs,
- 'num_filters': num_filters,
- 'use_separable_conv': use_separable_conv,
- 'activation': activation,
- 'use_sync_bn': use_sync_bn,
- 'norm_momentum': norm_momentum,
- 'norm_epsilon': norm_epsilon,
- 'kernel_regularizer': kernel_regularizer,
- 'bias_regularizer': bias_regularizer,
- }
-
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._bn_axis = -1
- else:
- self._bn_axis = 1
- self._activation = tf_utils.get_activation(activation)
-
- def build(self, input_shape):
- """Creates the variables of the head."""
- conv_op = (tf.keras.layers.SeparableConv2D
- if self._config_dict['use_separable_conv']
- else tf.keras.layers.Conv2D)
- conv_kwargs = {
- 'filters': self._config_dict['num_filters'],
- 'kernel_size': 3,
- 'padding': 'same',
- 'bias_initializer': tf.zeros_initializer(),
- 'bias_regularizer': self._config_dict['bias_regularizer'],
- }
- if not self._config_dict['use_separable_conv']:
- conv_kwargs.update({
- 'kernel_initializer': tf.keras.initializers.RandomNormal(
- stddev=0.01),
- 'kernel_regularizer': self._config_dict['kernel_regularizer'],
- })
- bn_op = (tf.keras.layers.experimental.SyncBatchNormalization
- if self._config_dict['use_sync_bn']
- else tf.keras.layers.BatchNormalization)
- bn_kwargs = {
- 'axis': self._bn_axis,
- 'momentum': self._config_dict['norm_momentum'],
- 'epsilon': self._config_dict['norm_epsilon'],
- }
-
- self._convs = []
- self._norms = []
- for level in range(
- self._config_dict['min_level'], self._config_dict['max_level'] + 1):
- this_level_norms = []
- for i in range(self._config_dict['num_convs']):
- if level == self._config_dict['min_level']:
- conv_name = 'rpn-conv_{}'.format(i)
- self._convs.append(conv_op(name=conv_name, **conv_kwargs))
- norm_name = 'rpn-conv-norm_{}_{}'.format(level, i)
- this_level_norms.append(bn_op(name=norm_name, **bn_kwargs))
- self._norms.append(this_level_norms)
-
- classifier_kwargs = {
- 'filters': self._config_dict['num_anchors_per_location'],
- 'kernel_size': 1,
- 'padding': 'valid',
- 'bias_initializer': tf.zeros_initializer(),
- 'bias_regularizer': self._config_dict['bias_regularizer'],
- }
- if not self._config_dict['use_separable_conv']:
- classifier_kwargs.update({
- 'kernel_initializer': tf.keras.initializers.RandomNormal(
- stddev=1e-5),
- 'kernel_regularizer': self._config_dict['kernel_regularizer'],
- })
- self._classifier = conv_op(name='rpn-scores', **classifier_kwargs)
-
- box_regressor_kwargs = {
- 'filters': 4 * self._config_dict['num_anchors_per_location'],
- 'kernel_size': 1,
- 'padding': 'valid',
- 'bias_initializer': tf.zeros_initializer(),
- 'bias_regularizer': self._config_dict['bias_regularizer'],
- }
- if not self._config_dict['use_separable_conv']:
- box_regressor_kwargs.update({
- 'kernel_initializer': tf.keras.initializers.RandomNormal(
- stddev=1e-5),
- 'kernel_regularizer': self._config_dict['kernel_regularizer'],
- })
- self._box_regressor = conv_op(name='rpn-boxes', **box_regressor_kwargs)
-
- super(RPNHead, self).build(input_shape)
-
- def call(self, features: Mapping[str, tf.Tensor]):
- """Forward pass of the RPN head.
-
- Args:
- features: A `dict` of `tf.Tensor` where
- - key: A `str` of the level of the multilevel features.
- - values: A `tf.Tensor`, the feature map tensors, whose shape is [batch,
- height_l, width_l, channels].
-
- Returns:
- scores: A `dict` of `tf.Tensor` which includes scores of the predictions.
- - key: A `str` of the level of the multilevel predictions.
- - values: A `tf.Tensor` of the box scores predicted from a particular
- feature level, whose shape is
- [batch, height_l, width_l, num_classes * num_anchors_per_location].
- boxes: A `dict` of `tf.Tensor` which includes coordinates of the
- predictions.
- - key: A `str` of the level of the multilevel predictions.
- - values: A `tf.Tensor` of the box scores predicted from a particular
- feature level, whose shape is
- [batch, height_l, width_l, 4 * num_anchors_per_location].
- """
- scores = {}
- boxes = {}
- for i, level in enumerate(
- range(self._config_dict['min_level'],
- self._config_dict['max_level'] + 1)):
- x = features[str(level)]
- for conv, norm in zip(self._convs, self._norms[i]):
- x = conv(x)
- x = norm(x)
- x = self._activation(x)
- scores[str(level)] = self._classifier(x)
- boxes[str(level)] = self._box_regressor(x)
- return scores, boxes
-
- def get_config(self):
- return self._config_dict
-
- @classmethod
- def from_config(cls, config):
- return cls(**config)
diff --git a/official/vision/beta/modeling/heads/dense_prediction_heads_test.py b/official/vision/beta/modeling/heads/dense_prediction_heads_test.py
deleted file mode 100644
index 9387ccdd2b578b3c1ee42e4ed8441cd83f4e60b5..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/heads/dense_prediction_heads_test.py
+++ /dev/null
@@ -1,148 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for dense_prediction_heads.py."""
-
-# Import libraries
-from absl.testing import parameterized
-import numpy as np
-import tensorflow as tf
-
-from official.vision.beta.modeling.heads import dense_prediction_heads
-
-
-class RetinaNetHeadTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (False, False, False),
- (False, True, False),
- (True, False, True),
- (True, True, True),
- )
- def test_forward(self, use_separable_conv, use_sync_bn, has_att_heads):
- if has_att_heads:
- attribute_heads = [dict(name='depth', type='regression', size=1)]
- else:
- attribute_heads = None
-
- retinanet_head = dense_prediction_heads.RetinaNetHead(
- min_level=3,
- max_level=4,
- num_classes=3,
- num_anchors_per_location=3,
- num_convs=2,
- num_filters=256,
- attribute_heads=attribute_heads,
- use_separable_conv=use_separable_conv,
- activation='relu',
- use_sync_bn=use_sync_bn,
- norm_momentum=0.99,
- norm_epsilon=0.001,
- kernel_regularizer=None,
- bias_regularizer=None,
- )
- features = {
- '3': np.random.rand(2, 128, 128, 16),
- '4': np.random.rand(2, 64, 64, 16),
- }
- scores, boxes, attributes = retinanet_head(features)
- self.assertAllEqual(scores['3'].numpy().shape, [2, 128, 128, 9])
- self.assertAllEqual(scores['4'].numpy().shape, [2, 64, 64, 9])
- self.assertAllEqual(boxes['3'].numpy().shape, [2, 128, 128, 12])
- self.assertAllEqual(boxes['4'].numpy().shape, [2, 64, 64, 12])
- if has_att_heads:
- for att in attributes.values():
- self.assertAllEqual(att['3'].numpy().shape, [2, 128, 128, 3])
- self.assertAllEqual(att['4'].numpy().shape, [2, 64, 64, 3])
-
- def test_serialize_deserialize(self):
- retinanet_head = dense_prediction_heads.RetinaNetHead(
- min_level=3,
- max_level=7,
- num_classes=3,
- num_anchors_per_location=9,
- num_convs=2,
- num_filters=16,
- attribute_heads=None,
- use_separable_conv=False,
- activation='relu',
- use_sync_bn=False,
- norm_momentum=0.99,
- norm_epsilon=0.001,
- kernel_regularizer=None,
- bias_regularizer=None,
- )
- config = retinanet_head.get_config()
- new_retinanet_head = (
- dense_prediction_heads.RetinaNetHead.from_config(config))
- self.assertAllEqual(
- retinanet_head.get_config(), new_retinanet_head.get_config())
-
-
-class RpnHeadTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (False, False),
- (False, True),
- (True, False),
- (True, True),
- )
- def test_forward(self, use_separable_conv, use_sync_bn):
- rpn_head = dense_prediction_heads.RPNHead(
- min_level=3,
- max_level=4,
- num_anchors_per_location=3,
- num_convs=2,
- num_filters=256,
- use_separable_conv=use_separable_conv,
- activation='relu',
- use_sync_bn=use_sync_bn,
- norm_momentum=0.99,
- norm_epsilon=0.001,
- kernel_regularizer=None,
- bias_regularizer=None,
- )
- features = {
- '3': np.random.rand(2, 128, 128, 16),
- '4': np.random.rand(2, 64, 64, 16),
- }
- scores, boxes = rpn_head(features)
- self.assertAllEqual(scores['3'].numpy().shape, [2, 128, 128, 3])
- self.assertAllEqual(scores['4'].numpy().shape, [2, 64, 64, 3])
- self.assertAllEqual(boxes['3'].numpy().shape, [2, 128, 128, 12])
- self.assertAllEqual(boxes['4'].numpy().shape, [2, 64, 64, 12])
-
- def test_serialize_deserialize(self):
- rpn_head = dense_prediction_heads.RPNHead(
- min_level=3,
- max_level=7,
- num_anchors_per_location=9,
- num_convs=2,
- num_filters=16,
- use_separable_conv=False,
- activation='relu',
- use_sync_bn=False,
- norm_momentum=0.99,
- norm_epsilon=0.001,
- kernel_regularizer=None,
- bias_regularizer=None,
- )
- config = rpn_head.get_config()
- new_rpn_head = dense_prediction_heads.RPNHead.from_config(config)
- self.assertAllEqual(rpn_head.get_config(), new_rpn_head.get_config())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/heads/instance_heads.py b/official/vision/beta/modeling/heads/instance_heads.py
deleted file mode 100644
index b0e3ac74a36b1e3a19e28e4d0de21aaa5bc5484d..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/heads/instance_heads.py
+++ /dev/null
@@ -1,444 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains definitions of instance prediction heads."""
-
-from typing import List, Union, Optional
-# Import libraries
-import tensorflow as tf
-
-from official.modeling import tf_utils
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class DetectionHead(tf.keras.layers.Layer):
- """Creates a detection head."""
-
- def __init__(
- self,
- num_classes: int,
- num_convs: int = 0,
- num_filters: int = 256,
- use_separable_conv: bool = False,
- num_fcs: int = 2,
- fc_dims: int = 1024,
- class_agnostic_bbox_pred: bool = False,
- activation: str = 'relu',
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- **kwargs):
- """Initializes a detection head.
-
- Args:
- num_classes: An `int` for the number of classes.
- num_convs: An `int` number that represents the number of the intermediate
- convolution layers before the FC layers.
- num_filters: An `int` number that represents the number of filters of the
- intermediate convolution layers.
- use_separable_conv: A `bool` that indicates whether the separable
- convolution layers is used.
- num_fcs: An `int` number that represents the number of FC layers before
- the predictions.
- fc_dims: An `int` number that represents the number of dimension of the FC
- layers.
- class_agnostic_bbox_pred: `bool`, indicating whether bboxes should be
- predicted for every class or not.
- activation: A `str` that indicates which activation is used, e.g. 'relu',
- 'swish', etc.
- use_sync_bn: A `bool` that indicates whether to use synchronized batch
- normalization across different replicas.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default is None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2D.
- **kwargs: Additional keyword arguments to be passed.
- """
- super(DetectionHead, self).__init__(**kwargs)
- self._config_dict = {
- 'num_classes': num_classes,
- 'num_convs': num_convs,
- 'num_filters': num_filters,
- 'use_separable_conv': use_separable_conv,
- 'num_fcs': num_fcs,
- 'fc_dims': fc_dims,
- 'class_agnostic_bbox_pred': class_agnostic_bbox_pred,
- 'activation': activation,
- 'use_sync_bn': use_sync_bn,
- 'norm_momentum': norm_momentum,
- 'norm_epsilon': norm_epsilon,
- 'kernel_regularizer': kernel_regularizer,
- 'bias_regularizer': bias_regularizer,
- }
-
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._bn_axis = -1
- else:
- self._bn_axis = 1
- self._activation = tf_utils.get_activation(activation)
-
- def build(self, input_shape: Union[tf.TensorShape, List[tf.TensorShape]]):
- """Creates the variables of the head."""
- conv_op = (tf.keras.layers.SeparableConv2D
- if self._config_dict['use_separable_conv']
- else tf.keras.layers.Conv2D)
- conv_kwargs = {
- 'filters': self._config_dict['num_filters'],
- 'kernel_size': 3,
- 'padding': 'same',
- }
- if self._config_dict['use_separable_conv']:
- conv_kwargs.update({
- 'depthwise_initializer': tf.keras.initializers.VarianceScaling(
- scale=2, mode='fan_out', distribution='untruncated_normal'),
- 'pointwise_initializer': tf.keras.initializers.VarianceScaling(
- scale=2, mode='fan_out', distribution='untruncated_normal'),
- 'bias_initializer': tf.zeros_initializer(),
- 'depthwise_regularizer': self._config_dict['kernel_regularizer'],
- 'pointwise_regularizer': self._config_dict['kernel_regularizer'],
- 'bias_regularizer': self._config_dict['bias_regularizer'],
- })
- else:
- conv_kwargs.update({
- 'kernel_initializer': tf.keras.initializers.VarianceScaling(
- scale=2, mode='fan_out', distribution='untruncated_normal'),
- 'bias_initializer': tf.zeros_initializer(),
- 'kernel_regularizer': self._config_dict['kernel_regularizer'],
- 'bias_regularizer': self._config_dict['bias_regularizer'],
- })
- bn_op = (tf.keras.layers.experimental.SyncBatchNormalization
- if self._config_dict['use_sync_bn']
- else tf.keras.layers.BatchNormalization)
- bn_kwargs = {
- 'axis': self._bn_axis,
- 'momentum': self._config_dict['norm_momentum'],
- 'epsilon': self._config_dict['norm_epsilon'],
- }
-
- self._convs = []
- self._conv_norms = []
- for i in range(self._config_dict['num_convs']):
- conv_name = 'detection-conv_{}'.format(i)
- self._convs.append(conv_op(name=conv_name, **conv_kwargs))
- bn_name = 'detection-conv-bn_{}'.format(i)
- self._conv_norms.append(bn_op(name=bn_name, **bn_kwargs))
-
- self._fcs = []
- self._fc_norms = []
- for i in range(self._config_dict['num_fcs']):
- fc_name = 'detection-fc_{}'.format(i)
- self._fcs.append(
- tf.keras.layers.Dense(
- units=self._config_dict['fc_dims'],
- kernel_initializer=tf.keras.initializers.VarianceScaling(
- scale=1 / 3.0, mode='fan_out', distribution='uniform'),
- kernel_regularizer=self._config_dict['kernel_regularizer'],
- bias_regularizer=self._config_dict['bias_regularizer'],
- name=fc_name))
- bn_name = 'detection-fc-bn_{}'.format(i)
- self._fc_norms.append(bn_op(name=bn_name, **bn_kwargs))
-
- self._classifier = tf.keras.layers.Dense(
- units=self._config_dict['num_classes'],
- kernel_initializer=tf.keras.initializers.RandomNormal(stddev=0.01),
- bias_initializer=tf.zeros_initializer(),
- kernel_regularizer=self._config_dict['kernel_regularizer'],
- bias_regularizer=self._config_dict['bias_regularizer'],
- name='detection-scores')
-
- num_box_outputs = (4 if self._config_dict['class_agnostic_bbox_pred'] else
- self._config_dict['num_classes'] * 4)
- self._box_regressor = tf.keras.layers.Dense(
- units=num_box_outputs,
- kernel_initializer=tf.keras.initializers.RandomNormal(stddev=0.001),
- bias_initializer=tf.zeros_initializer(),
- kernel_regularizer=self._config_dict['kernel_regularizer'],
- bias_regularizer=self._config_dict['bias_regularizer'],
- name='detection-boxes')
-
- super(DetectionHead, self).build(input_shape)
-
- def call(self, inputs: tf.Tensor, training: bool = None):
- """Forward pass of box and class branches for the Mask-RCNN model.
-
- Args:
- inputs: A `tf.Tensor` of the shape [batch_size, num_instances, roi_height,
- roi_width, roi_channels], representing the ROI features.
- training: a `bool` indicating whether it is in `training` mode.
-
- Returns:
- class_outputs: A `tf.Tensor` of the shape
- [batch_size, num_rois, num_classes], representing the class predictions.
- box_outputs: A `tf.Tensor` of the shape
- [batch_size, num_rois, num_classes * 4], representing the box
- predictions.
- """
- roi_features = inputs
- _, num_rois, height, width, filters = roi_features.get_shape().as_list()
-
- x = tf.reshape(roi_features, [-1, height, width, filters])
- for conv, bn in zip(self._convs, self._conv_norms):
- x = conv(x)
- x = bn(x)
- x = self._activation(x)
-
- _, _, _, filters = x.get_shape().as_list()
- x = tf.reshape(x, [-1, num_rois, height * width * filters])
-
- for fc, bn in zip(self._fcs, self._fc_norms):
- x = fc(x)
- x = bn(x)
- x = self._activation(x)
-
- classes = self._classifier(x)
- boxes = self._box_regressor(x)
- return classes, boxes
-
- def get_config(self):
- return self._config_dict
-
- @classmethod
- def from_config(cls, config):
- return cls(**config)
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class MaskHead(tf.keras.layers.Layer):
- """Creates a mask head."""
-
- def __init__(
- self,
- num_classes: int,
- upsample_factor: int = 2,
- num_convs: int = 4,
- num_filters: int = 256,
- use_separable_conv: bool = False,
- activation: str = 'relu',
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- class_agnostic: bool = False,
- **kwargs):
- """Initializes a mask head.
-
- Args:
- num_classes: An `int` of the number of classes.
- upsample_factor: An `int` that indicates the upsample factor to generate
- the final predicted masks. It should be >= 1.
- num_convs: An `int` number that represents the number of the intermediate
- convolution layers before the mask prediction layers.
- num_filters: An `int` number that represents the number of filters of the
- intermediate convolution layers.
- use_separable_conv: A `bool` that indicates whether the separable
- convolution layers is used.
- activation: A `str` that indicates which activation is used, e.g. 'relu',
- 'swish', etc.
- use_sync_bn: A `bool` that indicates whether to use synchronized batch
- normalization across different replicas.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default is None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2D.
- class_agnostic: A `bool`. If set, we use a single channel mask head that
- is shared between all classes.
- **kwargs: Additional keyword arguments to be passed.
- """
- super(MaskHead, self).__init__(**kwargs)
- self._config_dict = {
- 'num_classes': num_classes,
- 'upsample_factor': upsample_factor,
- 'num_convs': num_convs,
- 'num_filters': num_filters,
- 'use_separable_conv': use_separable_conv,
- 'activation': activation,
- 'use_sync_bn': use_sync_bn,
- 'norm_momentum': norm_momentum,
- 'norm_epsilon': norm_epsilon,
- 'kernel_regularizer': kernel_regularizer,
- 'bias_regularizer': bias_regularizer,
- 'class_agnostic': class_agnostic
- }
-
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._bn_axis = -1
- else:
- self._bn_axis = 1
- self._activation = tf_utils.get_activation(activation)
-
- def build(self, input_shape: Union[tf.TensorShape, List[tf.TensorShape]]):
- """Creates the variables of the head."""
- conv_op = (tf.keras.layers.SeparableConv2D
- if self._config_dict['use_separable_conv']
- else tf.keras.layers.Conv2D)
- conv_kwargs = {
- 'filters': self._config_dict['num_filters'],
- 'kernel_size': 3,
- 'padding': 'same',
- }
- if self._config_dict['use_separable_conv']:
- conv_kwargs.update({
- 'depthwise_initializer': tf.keras.initializers.VarianceScaling(
- scale=2, mode='fan_out', distribution='untruncated_normal'),
- 'pointwise_initializer': tf.keras.initializers.VarianceScaling(
- scale=2, mode='fan_out', distribution='untruncated_normal'),
- 'bias_initializer': tf.zeros_initializer(),
- 'depthwise_regularizer': self._config_dict['kernel_regularizer'],
- 'pointwise_regularizer': self._config_dict['kernel_regularizer'],
- 'bias_regularizer': self._config_dict['bias_regularizer'],
- })
- else:
- conv_kwargs.update({
- 'kernel_initializer': tf.keras.initializers.VarianceScaling(
- scale=2, mode='fan_out', distribution='untruncated_normal'),
- 'bias_initializer': tf.zeros_initializer(),
- 'kernel_regularizer': self._config_dict['kernel_regularizer'],
- 'bias_regularizer': self._config_dict['bias_regularizer'],
- })
- bn_op = (tf.keras.layers.experimental.SyncBatchNormalization
- if self._config_dict['use_sync_bn']
- else tf.keras.layers.BatchNormalization)
- bn_kwargs = {
- 'axis': self._bn_axis,
- 'momentum': self._config_dict['norm_momentum'],
- 'epsilon': self._config_dict['norm_epsilon'],
- }
-
- self._convs = []
- self._conv_norms = []
- for i in range(self._config_dict['num_convs']):
- conv_name = 'mask-conv_{}'.format(i)
- self._convs.append(conv_op(name=conv_name, **conv_kwargs))
- bn_name = 'mask-conv-bn_{}'.format(i)
- self._conv_norms.append(bn_op(name=bn_name, **bn_kwargs))
-
- self._deconv = tf.keras.layers.Conv2DTranspose(
- filters=self._config_dict['num_filters'],
- kernel_size=self._config_dict['upsample_factor'],
- strides=self._config_dict['upsample_factor'],
- padding='valid',
- kernel_initializer=tf.keras.initializers.VarianceScaling(
- scale=2, mode='fan_out', distribution='untruncated_normal'),
- bias_initializer=tf.zeros_initializer(),
- kernel_regularizer=self._config_dict['kernel_regularizer'],
- bias_regularizer=self._config_dict['bias_regularizer'],
- name='mask-upsampling')
- self._deconv_bn = bn_op(name='mask-deconv-bn', **bn_kwargs)
-
- if self._config_dict['class_agnostic']:
- num_filters = 1
- else:
- num_filters = self._config_dict['num_classes']
-
- conv_kwargs = {
- 'filters': num_filters,
- 'kernel_size': 1,
- 'padding': 'valid',
- }
- if self._config_dict['use_separable_conv']:
- conv_kwargs.update({
- 'depthwise_initializer': tf.keras.initializers.VarianceScaling(
- scale=2, mode='fan_out', distribution='untruncated_normal'),
- 'pointwise_initializer': tf.keras.initializers.VarianceScaling(
- scale=2, mode='fan_out', distribution='untruncated_normal'),
- 'bias_initializer': tf.zeros_initializer(),
- 'depthwise_regularizer': self._config_dict['kernel_regularizer'],
- 'pointwise_regularizer': self._config_dict['kernel_regularizer'],
- 'bias_regularizer': self._config_dict['bias_regularizer'],
- })
- else:
- conv_kwargs.update({
- 'kernel_initializer': tf.keras.initializers.VarianceScaling(
- scale=2, mode='fan_out', distribution='untruncated_normal'),
- 'bias_initializer': tf.zeros_initializer(),
- 'kernel_regularizer': self._config_dict['kernel_regularizer'],
- 'bias_regularizer': self._config_dict['bias_regularizer'],
- })
- self._mask_regressor = conv_op(name='mask-logits', **conv_kwargs)
-
- super(MaskHead, self).build(input_shape)
-
- def call(self, inputs: List[tf.Tensor], training: bool = None):
- """Forward pass of mask branch for the Mask-RCNN model.
-
- Args:
- inputs: A `list` of two tensors where
- inputs[0]: A `tf.Tensor` of shape [batch_size, num_instances,
- roi_height, roi_width, roi_channels], representing the ROI features.
- inputs[1]: A `tf.Tensor` of shape [batch_size, num_instances],
- representing the classes of the ROIs.
- training: A `bool` indicating whether it is in `training` mode.
-
- Returns:
- mask_outputs: A `tf.Tensor` of shape
- [batch_size, num_instances, roi_height * upsample_factor,
- roi_width * upsample_factor], representing the mask predictions.
- """
- roi_features, roi_classes = inputs
- batch_size, num_rois, height, width, filters = (
- roi_features.get_shape().as_list())
- if batch_size is None:
- batch_size = tf.shape(roi_features)[0]
-
- x = tf.reshape(roi_features, [-1, height, width, filters])
- for conv, bn in zip(self._convs, self._conv_norms):
- x = conv(x)
- x = bn(x)
- x = self._activation(x)
-
- x = self._deconv(x)
- x = self._deconv_bn(x)
- x = self._activation(x)
-
- logits = self._mask_regressor(x)
-
- mask_height = height * self._config_dict['upsample_factor']
- mask_width = width * self._config_dict['upsample_factor']
-
- if self._config_dict['class_agnostic']:
- logits = tf.reshape(logits, [-1, num_rois, mask_height, mask_width, 1])
- else:
- logits = tf.reshape(
- logits,
- [-1, num_rois, mask_height, mask_width,
- self._config_dict['num_classes']])
-
- batch_indices = tf.tile(
- tf.expand_dims(tf.range(batch_size), axis=1), [1, num_rois])
- mask_indices = tf.tile(
- tf.expand_dims(tf.range(num_rois), axis=0), [batch_size, 1])
-
- if self._config_dict['class_agnostic']:
- class_gather_indices = tf.zeros_like(roi_classes, dtype=tf.int32)
- else:
- class_gather_indices = tf.cast(roi_classes, dtype=tf.int32)
-
- gather_indices = tf.stack(
- [batch_indices, mask_indices, class_gather_indices],
- axis=2)
- mask_outputs = tf.gather_nd(
- tf.transpose(logits, [0, 1, 4, 2, 3]), gather_indices)
- return mask_outputs
-
- def get_config(self):
- return self._config_dict
-
- @classmethod
- def from_config(cls, config):
- return cls(**config)
diff --git a/official/vision/beta/modeling/heads/instance_heads_test.py b/official/vision/beta/modeling/heads/instance_heads_test.py
deleted file mode 100644
index bcce06c077bf9960f437a04d907f6d2a60f6b319..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/heads/instance_heads_test.py
+++ /dev/null
@@ -1,135 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for instance_heads.py."""
-
-# Import libraries
-from absl.testing import parameterized
-import numpy as np
-import tensorflow as tf
-
-from official.vision.beta.modeling.heads import instance_heads
-
-
-class DetectionHeadTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (0, 0, False, False),
- (0, 1, False, False),
- (1, 0, False, False),
- (1, 1, False, False),
- )
- def test_forward(self, num_convs, num_fcs, use_separable_conv, use_sync_bn):
- detection_head = instance_heads.DetectionHead(
- num_classes=3,
- num_convs=num_convs,
- num_filters=16,
- use_separable_conv=use_separable_conv,
- num_fcs=num_fcs,
- fc_dims=4,
- activation='relu',
- use_sync_bn=use_sync_bn,
- norm_momentum=0.99,
- norm_epsilon=0.001,
- kernel_regularizer=None,
- bias_regularizer=None,
- )
- roi_features = np.random.rand(2, 10, 128, 128, 16)
- scores, boxes = detection_head(roi_features)
- self.assertAllEqual(scores.numpy().shape, [2, 10, 3])
- self.assertAllEqual(boxes.numpy().shape, [2, 10, 12])
-
- def test_serialize_deserialize(self):
- detection_head = instance_heads.DetectionHead(
- num_classes=91,
- num_convs=0,
- num_filters=256,
- use_separable_conv=False,
- num_fcs=2,
- fc_dims=1024,
- activation='relu',
- use_sync_bn=False,
- norm_momentum=0.99,
- norm_epsilon=0.001,
- kernel_regularizer=None,
- bias_regularizer=None,
- )
- config = detection_head.get_config()
- new_detection_head = instance_heads.DetectionHead.from_config(config)
- self.assertAllEqual(
- detection_head.get_config(), new_detection_head.get_config())
-
-
-class MaskHeadTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (1, 1, False),
- (1, 2, False),
- (2, 1, False),
- (2, 2, False),
- )
- def test_forward(self, upsample_factor, num_convs, use_sync_bn):
- mask_head = instance_heads.MaskHead(
- num_classes=3,
- upsample_factor=upsample_factor,
- num_convs=num_convs,
- num_filters=16,
- use_separable_conv=False,
- activation='relu',
- use_sync_bn=use_sync_bn,
- norm_momentum=0.99,
- norm_epsilon=0.001,
- kernel_regularizer=None,
- bias_regularizer=None,
- )
- roi_features = np.random.rand(2, 10, 14, 14, 16)
- roi_classes = np.zeros((2, 10))
- masks = mask_head([roi_features, roi_classes])
- self.assertAllEqual(
- masks.numpy().shape,
- [2, 10, 14 * upsample_factor, 14 * upsample_factor])
-
- def test_serialize_deserialize(self):
- mask_head = instance_heads.MaskHead(
- num_classes=3,
- upsample_factor=2,
- num_convs=1,
- num_filters=256,
- use_separable_conv=False,
- activation='relu',
- use_sync_bn=False,
- norm_momentum=0.99,
- norm_epsilon=0.001,
- kernel_regularizer=None,
- bias_regularizer=None,
- )
- config = mask_head.get_config()
- new_mask_head = instance_heads.MaskHead.from_config(config)
- self.assertAllEqual(
- mask_head.get_config(), new_mask_head.get_config())
-
- def test_forward_class_agnostic(self):
- mask_head = instance_heads.MaskHead(
- num_classes=3,
- class_agnostic=True
- )
- roi_features = np.random.rand(2, 10, 14, 14, 16)
- roi_classes = np.zeros((2, 10))
- masks = mask_head([roi_features, roi_classes])
- self.assertAllEqual(masks.numpy().shape, [2, 10, 28, 28])
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/heads/segmentation_heads.py b/official/vision/beta/modeling/heads/segmentation_heads.py
deleted file mode 100644
index 5d6a4d954b968a31ef208f2a0decb1d113cb8693..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/heads/segmentation_heads.py
+++ /dev/null
@@ -1,441 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains definitions of segmentation heads."""
-from typing import List, Union, Optional, Mapping, Tuple, Any
-import tensorflow as tf
-
-from official.modeling import tf_utils
-from official.vision.beta.modeling.layers import nn_layers
-from official.vision.beta.ops import spatial_transform_ops
-
-
-class MaskScoring(tf.keras.Model):
- """Creates a mask scoring layer.
-
- This implements mask scoring layer from the paper:
-
- Zhaojin Huang, Lichao Huang, Yongchao Gong, Chang Huang, Xinggang Wang.
- Mask Scoring R-CNN.
- (https://arxiv.org/pdf/1903.00241.pdf)
- """
-
- def __init__(
- self,
- num_classes: int,
- fc_input_size: List[int],
- num_convs: int = 3,
- num_filters: int = 256,
- fc_dims: int = 1024,
- num_fcs: int = 2,
- activation: str = 'relu',
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- **kwargs):
-
- """Initializes mask scoring layer.
-
- Args:
- num_classes: An `int` for number of classes.
- fc_input_size: A List of `int` for the input size of the
- fully connected layers.
- num_convs: An`int` for number of conv layers.
- num_filters: An `int` for the number of filters for conv layers.
- fc_dims: An `int` number of filters for each fully connected layers.
- num_fcs: An `int` for number of fully connected layers.
- activation: A `str` name of the activation function.
- use_sync_bn: A bool, whether or not to use sync batch normalization.
- norm_momentum: A float for the momentum in BatchNorm. Defaults to 0.99.
- norm_epsilon: A float for the epsilon value in BatchNorm. Defaults to
- 0.001.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default is None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2D.
- **kwargs: Additional keyword arguments to be passed.
- """
- super(MaskScoring, self).__init__(**kwargs)
-
- self._config_dict = {
- 'num_classes': num_classes,
- 'num_convs': num_convs,
- 'num_filters': num_filters,
- 'fc_input_size': fc_input_size,
- 'fc_dims': fc_dims,
- 'num_fcs': num_fcs,
- 'use_sync_bn': use_sync_bn,
- 'norm_momentum': norm_momentum,
- 'norm_epsilon': norm_epsilon,
- 'activation': activation,
- 'kernel_regularizer': kernel_regularizer,
- 'bias_regularizer': bias_regularizer,
- }
-
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._bn_axis = -1
- else:
- self._bn_axis = 1
- self._activation = tf_utils.get_activation(activation)
-
- def build(self, input_shape: Union[tf.TensorShape, List[tf.TensorShape]]):
- """Creates the variables of the mask scoring head."""
- conv_op = tf.keras.layers.Conv2D
- conv_kwargs = {
- 'filters': self._config_dict['num_filters'],
- 'kernel_size': 3,
- 'padding': 'same',
- }
- conv_kwargs.update({
- 'kernel_initializer': tf.keras.initializers.VarianceScaling(
- scale=2, mode='fan_out', distribution='untruncated_normal'),
- 'bias_initializer': tf.zeros_initializer(),
- 'kernel_regularizer': self._config_dict['kernel_regularizer'],
- 'bias_regularizer': self._config_dict['bias_regularizer'],
- })
- bn_op = (tf.keras.layers.experimental.SyncBatchNormalization
- if self._config_dict['use_sync_bn']
- else tf.keras.layers.BatchNormalization)
- bn_kwargs = {
- 'axis': self._bn_axis,
- 'momentum': self._config_dict['norm_momentum'],
- 'epsilon': self._config_dict['norm_epsilon'],
- }
-
- self._convs = []
- self._conv_norms = []
- for i in range(self._config_dict['num_convs']):
- conv_name = 'mask-scoring_{}'.format(i)
- self._convs.append(conv_op(name=conv_name, **conv_kwargs))
- bn_name = 'mask-scoring-bn_{}'.format(i)
- self._conv_norms.append(bn_op(name=bn_name, **bn_kwargs))
-
- self._fcs = []
- self._fc_norms = []
- for i in range(self._config_dict['num_fcs']):
- fc_name = 'mask-scoring-fc_{}'.format(i)
- self._fcs.append(
- tf.keras.layers.Dense(
- units=self._config_dict['fc_dims'],
- kernel_initializer=tf.keras.initializers.VarianceScaling(
- scale=1 / 3.0, mode='fan_out', distribution='uniform'),
- kernel_regularizer=self._config_dict['kernel_regularizer'],
- bias_regularizer=self._config_dict['bias_regularizer'],
- name=fc_name))
- bn_name = 'mask-scoring-fc-bn_{}'.format(i)
- self._fc_norms.append(bn_op(name=bn_name, **bn_kwargs))
-
- self._classifier = tf.keras.layers.Dense(
- units=self._config_dict['num_classes'],
- kernel_initializer=tf.keras.initializers.RandomNormal(stddev=0.01),
- bias_initializer=tf.zeros_initializer(),
- kernel_regularizer=self._config_dict['kernel_regularizer'],
- bias_regularizer=self._config_dict['bias_regularizer'],
- name='iou-scores')
-
- super(MaskScoring, self).build(input_shape)
-
- def call(self, inputs: tf.Tensor, training: bool = None):
- """Forward pass mask scoring head.
-
- Args:
- inputs: A `tf.Tensor` of the shape [batch_size, width, size, num_classes],
- representing the segmentation logits.
- training: a `bool` indicating whether it is in `training` mode.
-
- Returns:
- mask_scores: A `tf.Tensor` of predicted mask scores
- [batch_size, num_classes].
- """
- x = tf.stop_gradient(inputs)
- for conv, bn in zip(self._convs, self._conv_norms):
- x = conv(x)
- x = bn(x)
- x = self._activation(x)
-
- # Casts feat to float32 so the resize op can be run on TPU.
- x = tf.cast(x, tf.float32)
- x = tf.image.resize(x, size=self._config_dict['fc_input_size'],
- method=tf.image.ResizeMethod.BILINEAR)
- # Casts it back to be compatible with the rest opetations.
- x = tf.cast(x, inputs.dtype)
-
- _, h, w, filters = x.get_shape().as_list()
- x = tf.reshape(x, [-1, h * w * filters])
-
- for fc, bn in zip(self._fcs, self._fc_norms):
- x = fc(x)
- x = bn(x)
- x = self._activation(x)
-
- ious = self._classifier(x)
- return ious
-
- def get_config(self) -> Mapping[str, Any]:
- return self._config_dict
-
- @classmethod
- def from_config(cls, config, custom_objects=None):
- return cls(**config)
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class SegmentationHead(tf.keras.layers.Layer):
- """Creates a segmentation head."""
-
- def __init__(
- self,
- num_classes: int,
- level: Union[int, str],
- num_convs: int = 2,
- num_filters: int = 256,
- use_depthwise_convolution: bool = False,
- prediction_kernel_size: int = 1,
- upsample_factor: int = 1,
- feature_fusion: Optional[str] = None,
- decoder_min_level: Optional[int] = None,
- decoder_max_level: Optional[int] = None,
- low_level: int = 2,
- low_level_num_filters: int = 48,
- num_decoder_filters: int = 256,
- activation: str = 'relu',
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- **kwargs):
- """Initializes a segmentation head.
-
- Args:
- num_classes: An `int` number of mask classification categories. The number
- of classes does not include background class.
- level: An `int` or `str`, level to use to build segmentation head.
- num_convs: An `int` number of stacked convolution before the last
- prediction layer.
- num_filters: An `int` number to specify the number of filters used.
- Default is 256.
- use_depthwise_convolution: A bool to specify if use depthwise separable
- convolutions.
- prediction_kernel_size: An `int` number to specify the kernel size of the
- prediction layer.
- upsample_factor: An `int` number to specify the upsampling factor to
- generate finer mask. Default 1 means no upsampling is applied.
- feature_fusion: One of `deeplabv3plus`, `pyramid_fusion`,
- `panoptic_fpn_fusion`, or None. If `deeplabv3plus`, features from
- decoder_features[level] will be fused with low level feature maps from
- backbone. If `pyramid_fusion`, multiscale features will be resized and
- fused at the target level.
- decoder_min_level: An `int` of minimum level from decoder to use in
- feature fusion. It is only used when feature_fusion is set to
- `panoptic_fpn_fusion`.
- decoder_max_level: An `int` of maximum level from decoder to use in
- feature fusion. It is only used when feature_fusion is set to
- `panoptic_fpn_fusion`.
- low_level: An `int` of backbone level to be used for feature fusion. It is
- used when feature_fusion is set to `deeplabv3plus`.
- low_level_num_filters: An `int` of reduced number of filters for the low
- level features before fusing it with higher level features. It is only
- used when feature_fusion is set to `deeplabv3plus`.
- num_decoder_filters: An `int` of number of filters in the decoder outputs.
- It is only used when feature_fusion is set to `panoptic_fpn_fusion`.
- activation: A `str` that indicates which activation is used, e.g. 'relu',
- 'swish', etc.
- use_sync_bn: A `bool` that indicates whether to use synchronized batch
- normalization across different replicas.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default is None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2D.
- **kwargs: Additional keyword arguments to be passed.
- """
- super(SegmentationHead, self).__init__(**kwargs)
-
- self._config_dict = {
- 'num_classes': num_classes,
- 'level': level,
- 'num_convs': num_convs,
- 'num_filters': num_filters,
- 'use_depthwise_convolution': use_depthwise_convolution,
- 'prediction_kernel_size': prediction_kernel_size,
- 'upsample_factor': upsample_factor,
- 'feature_fusion': feature_fusion,
- 'decoder_min_level': decoder_min_level,
- 'decoder_max_level': decoder_max_level,
- 'low_level': low_level,
- 'low_level_num_filters': low_level_num_filters,
- 'num_decoder_filters': num_decoder_filters,
- 'activation': activation,
- 'use_sync_bn': use_sync_bn,
- 'norm_momentum': norm_momentum,
- 'norm_epsilon': norm_epsilon,
- 'kernel_regularizer': kernel_regularizer,
- 'bias_regularizer': bias_regularizer
- }
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._bn_axis = -1
- else:
- self._bn_axis = 1
- self._activation = tf_utils.get_activation(activation)
-
- def build(self, input_shape: Union[tf.TensorShape, List[tf.TensorShape]]):
- """Creates the variables of the segmentation head."""
- use_depthwise_convolution = self._config_dict['use_depthwise_convolution']
- random_initializer = tf.keras.initializers.RandomNormal(stddev=0.01)
- conv_op = tf.keras.layers.Conv2D
- conv_kwargs = {
- 'kernel_size': 3 if not use_depthwise_convolution else 1,
- 'padding': 'same',
- 'use_bias': False,
- 'kernel_initializer': random_initializer,
- 'kernel_regularizer': self._config_dict['kernel_regularizer'],
- }
- bn_op = (tf.keras.layers.experimental.SyncBatchNormalization
- if self._config_dict['use_sync_bn']
- else tf.keras.layers.BatchNormalization)
- bn_kwargs = {
- 'axis': self._bn_axis,
- 'momentum': self._config_dict['norm_momentum'],
- 'epsilon': self._config_dict['norm_epsilon'],
- }
-
- if self._config_dict['feature_fusion'] == 'deeplabv3plus':
- # Deeplabv3+ feature fusion layers.
- self._dlv3p_conv = conv_op(
- kernel_size=1,
- padding='same',
- use_bias=False,
- kernel_initializer=tf.keras.initializers.RandomNormal(stddev=0.01),
- kernel_regularizer=self._config_dict['kernel_regularizer'],
- name='segmentation_head_deeplabv3p_fusion_conv',
- filters=self._config_dict['low_level_num_filters'])
-
- self._dlv3p_norm = bn_op(
- name='segmentation_head_deeplabv3p_fusion_norm', **bn_kwargs)
-
- elif self._config_dict['feature_fusion'] == 'panoptic_fpn_fusion':
- self._panoptic_fpn_fusion = nn_layers.PanopticFPNFusion(
- min_level=self._config_dict['decoder_min_level'],
- max_level=self._config_dict['decoder_max_level'],
- target_level=self._config_dict['level'],
- num_filters=self._config_dict['num_filters'],
- num_fpn_filters=self._config_dict['num_decoder_filters'],
- activation=self._config_dict['activation'],
- kernel_regularizer=self._config_dict['kernel_regularizer'],
- bias_regularizer=self._config_dict['bias_regularizer'])
-
- # Segmentation head layers.
- self._convs = []
- self._norms = []
- for i in range(self._config_dict['num_convs']):
- if use_depthwise_convolution:
- self._convs.append(
- tf.keras.layers.DepthwiseConv2D(
- name='segmentation_head_depthwise_conv_{}'.format(i),
- kernel_size=3,
- padding='same',
- use_bias=False,
- depthwise_initializer=random_initializer,
- depthwise_regularizer=self._config_dict['kernel_regularizer'],
- depth_multiplier=1))
- norm_name = 'segmentation_head_depthwise_norm_{}'.format(i)
- self._norms.append(bn_op(name=norm_name, **bn_kwargs))
- conv_name = 'segmentation_head_conv_{}'.format(i)
- self._convs.append(
- conv_op(
- name=conv_name,
- filters=self._config_dict['num_filters'],
- **conv_kwargs))
- norm_name = 'segmentation_head_norm_{}'.format(i)
- self._norms.append(bn_op(name=norm_name, **bn_kwargs))
-
- self._classifier = conv_op(
- name='segmentation_output',
- filters=self._config_dict['num_classes'],
- kernel_size=self._config_dict['prediction_kernel_size'],
- padding='same',
- bias_initializer=tf.zeros_initializer(),
- kernel_initializer=tf.keras.initializers.RandomNormal(stddev=0.01),
- kernel_regularizer=self._config_dict['kernel_regularizer'],
- bias_regularizer=self._config_dict['bias_regularizer'])
-
- super().build(input_shape)
-
- def call(self, inputs: Tuple[Union[tf.Tensor, Mapping[str, tf.Tensor]],
- Union[tf.Tensor, Mapping[str, tf.Tensor]]]):
- """Forward pass of the segmentation head.
-
- It supports both a tuple of 2 tensors or 2 dictionaries. The first is
- backbone endpoints, and the second is decoder endpoints. When inputs are
- tensors, they are from a single level of feature maps. When inputs are
- dictionaries, they contain multiple levels of feature maps, where the key
- is the index of feature map.
-
- Args:
- inputs: A tuple of 2 feature map tensors of shape
- [batch, height_l, width_l, channels] or 2 dictionaries of tensors:
- - key: A `str` of the level of the multilevel features.
- - values: A `tf.Tensor` of the feature map tensors, whose shape is
- [batch, height_l, width_l, channels].
- The first is backbone endpoints, and the second is decoder endpoints.
- Returns:
- segmentation prediction mask: A `tf.Tensor` of the segmentation mask
- scores predicted from input features.
- """
-
- backbone_output = inputs[0]
- decoder_output = inputs[1]
- if self._config_dict['feature_fusion'] == 'deeplabv3plus':
- # deeplabv3+ feature fusion
- x = decoder_output[str(self._config_dict['level'])] if isinstance(
- decoder_output, dict) else decoder_output
- y = backbone_output[str(self._config_dict['low_level'])] if isinstance(
- backbone_output, dict) else backbone_output
- y = self._dlv3p_norm(self._dlv3p_conv(y))
- y = self._activation(y)
-
- x = tf.image.resize(
- x, tf.shape(y)[1:3], method=tf.image.ResizeMethod.BILINEAR)
- x = tf.cast(x, dtype=y.dtype)
- x = tf.concat([x, y], axis=self._bn_axis)
- elif self._config_dict['feature_fusion'] == 'pyramid_fusion':
- if not isinstance(decoder_output, dict):
- raise ValueError('Only support dictionary decoder_output.')
- x = nn_layers.pyramid_feature_fusion(decoder_output,
- self._config_dict['level'])
- elif self._config_dict['feature_fusion'] == 'panoptic_fpn_fusion':
- x = self._panoptic_fpn_fusion(decoder_output)
- else:
- x = decoder_output[str(self._config_dict['level'])] if isinstance(
- decoder_output, dict) else decoder_output
-
- for conv, norm in zip(self._convs, self._norms):
- x = conv(x)
- x = norm(x)
- x = self._activation(x)
- if self._config_dict['upsample_factor'] > 1:
- x = spatial_transform_ops.nearest_upsampling(
- x, scale=self._config_dict['upsample_factor'])
-
- return self._classifier(x)
-
- def get_config(self):
- base_config = super().get_config()
- return dict(list(base_config.items()) + list(self._config_dict.items()))
-
- @classmethod
- def from_config(cls, config):
- return cls(**config)
diff --git a/official/vision/beta/modeling/heads/segmentation_heads_test.py b/official/vision/beta/modeling/heads/segmentation_heads_test.py
deleted file mode 100644
index df7933dd1fd1181e908b95b4a0afecf2a90d9a95..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/heads/segmentation_heads_test.py
+++ /dev/null
@@ -1,107 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for segmentation_heads.py."""
-
-# Import libraries
-from absl.testing import parameterized
-import numpy as np
-import tensorflow as tf
-
-from official.vision.beta.modeling.heads import segmentation_heads
-
-
-class SegmentationHeadTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (2, 'pyramid_fusion', None, None),
- (3, 'pyramid_fusion', None, None),
- (2, 'panoptic_fpn_fusion', 2, 5),
- (2, 'panoptic_fpn_fusion', 2, 6),
- (3, 'panoptic_fpn_fusion', 3, 5),
- (3, 'panoptic_fpn_fusion', 3, 6))
- def test_forward(self, level, feature_fusion,
- decoder_min_level, decoder_max_level):
- backbone_features = {
- '3': np.random.rand(2, 128, 128, 16),
- '4': np.random.rand(2, 64, 64, 16),
- '5': np.random.rand(2, 32, 32, 16),
- }
- decoder_features = {
- '3': np.random.rand(2, 128, 128, 64),
- '4': np.random.rand(2, 64, 64, 64),
- '5': np.random.rand(2, 32, 32, 64),
- '6': np.random.rand(2, 16, 16, 64),
- }
-
- if feature_fusion == 'panoptic_fpn_fusion':
- backbone_features['2'] = np.random.rand(2, 256, 256, 16)
- decoder_features['2'] = np.random.rand(2, 256, 256, 64)
-
- head = segmentation_heads.SegmentationHead(
- num_classes=10,
- level=level,
- feature_fusion=feature_fusion,
- decoder_min_level=decoder_min_level,
- decoder_max_level=decoder_max_level,
- num_decoder_filters=64)
-
- logits = head((backbone_features, decoder_features))
-
- if level in decoder_features:
- self.assertAllEqual(logits.numpy().shape, [
- 2, decoder_features[str(level)].shape[1],
- decoder_features[str(level)].shape[2], 10
- ])
-
- def test_serialize_deserialize(self):
- head = segmentation_heads.SegmentationHead(num_classes=10, level=3)
- config = head.get_config()
- new_head = segmentation_heads.SegmentationHead.from_config(config)
- self.assertAllEqual(head.get_config(), new_head.get_config())
-
-
-class MaskScoringHeadTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (1, 1, 64, [4, 4]),
- (2, 1, 64, [4, 4]),
- (3, 1, 64, [4, 4]),
- (1, 2, 32, [8, 8]),
- (2, 2, 32, [8, 8]),
- (3, 2, 32, [8, 8]),)
- def test_forward(self, num_convs, num_fcs,
- num_filters, fc_input_size):
- features = np.random.rand(2, 64, 64, 16)
-
- head = segmentation_heads.MaskScoring(
- num_classes=2,
- num_convs=num_convs,
- num_filters=num_filters,
- fc_dims=128,
- fc_input_size=fc_input_size)
-
- scores = head(features)
- self.assertAllEqual(scores.numpy().shape, [2, 2])
-
- def test_serialize_deserialize(self):
- head = segmentation_heads.MaskScoring(
- num_classes=2, fc_input_size=[4, 4], fc_dims=128)
- config = head.get_config()
- new_head = segmentation_heads.MaskScoring.from_config(config)
- self.assertAllEqual(head.get_config(), new_head.get_config())
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/layers/__init__.py b/official/vision/beta/modeling/layers/__init__.py
deleted file mode 100644
index 9c7feba2863784a13dc058d74cd58502257f970b..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/layers/__init__.py
+++ /dev/null
@@ -1,44 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Layers package definition."""
-
-from official.vision.beta.modeling.layers.box_sampler import BoxSampler
-from official.vision.beta.modeling.layers.detection_generator import DetectionGenerator
-from official.vision.beta.modeling.layers.detection_generator import MultilevelDetectionGenerator
-from official.vision.beta.modeling.layers.mask_sampler import MaskSampler
-from official.vision.beta.modeling.layers.nn_blocks import BottleneckBlock
-from official.vision.beta.modeling.layers.nn_blocks import BottleneckResidualInner
-from official.vision.beta.modeling.layers.nn_blocks import DepthwiseSeparableConvBlock
-from official.vision.beta.modeling.layers.nn_blocks import InvertedBottleneckBlock
-from official.vision.beta.modeling.layers.nn_blocks import ResidualBlock
-from official.vision.beta.modeling.layers.nn_blocks import ResidualInner
-from official.vision.beta.modeling.layers.nn_blocks import ReversibleLayer
-from official.vision.beta.modeling.layers.nn_blocks_3d import BottleneckBlock3D
-from official.vision.beta.modeling.layers.nn_blocks_3d import SelfGating
-from official.vision.beta.modeling.layers.nn_layers import CausalConvMixin
-from official.vision.beta.modeling.layers.nn_layers import Conv2D
-from official.vision.beta.modeling.layers.nn_layers import Conv3D
-from official.vision.beta.modeling.layers.nn_layers import DepthwiseConv2D
-from official.vision.beta.modeling.layers.nn_layers import GlobalAveragePool3D
-from official.vision.beta.modeling.layers.nn_layers import PositionalEncoding
-from official.vision.beta.modeling.layers.nn_layers import Scale
-from official.vision.beta.modeling.layers.nn_layers import SpatialAveragePool3D
-from official.vision.beta.modeling.layers.nn_layers import SqueezeExcitation
-from official.vision.beta.modeling.layers.nn_layers import StochasticDepth
-from official.vision.beta.modeling.layers.nn_layers import TemporalSoftmaxPool
-from official.vision.beta.modeling.layers.roi_aligner import MultilevelROIAligner
-from official.vision.beta.modeling.layers.roi_generator import MultilevelROIGenerator
-from official.vision.beta.modeling.layers.roi_sampler import ROISampler
diff --git a/official/vision/beta/modeling/layers/box_sampler.py b/official/vision/beta/modeling/layers/box_sampler.py
deleted file mode 100644
index f96898ad468f655d2c5cd88ccf73c8920368d62a..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/layers/box_sampler.py
+++ /dev/null
@@ -1,93 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains definitions of box sampler."""
-
-# Import libraries
-import tensorflow as tf
-
-from official.vision.beta.ops import sampling_ops
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class BoxSampler(tf.keras.layers.Layer):
- """Creates a BoxSampler to sample positive and negative boxes."""
-
- def __init__(self,
- num_samples: int = 512,
- foreground_fraction: float = 0.25,
- **kwargs):
- """Initializes a box sampler.
-
- Args:
- num_samples: An `int` of the number of sampled boxes per image.
- foreground_fraction: A `float` in [0, 1], what percentage of boxes should
- be sampled from the positive examples.
- **kwargs: Additional keyword arguments passed to Layer.
- """
- self._config_dict = {
- 'num_samples': num_samples,
- 'foreground_fraction': foreground_fraction,
- }
- super(BoxSampler, self).__init__(**kwargs)
-
- def call(self, positive_matches: tf.Tensor, negative_matches: tf.Tensor,
- ignored_matches: tf.Tensor):
- """Samples and selects positive and negative instances.
-
- Args:
- positive_matches: A `bool` tensor of shape of [batch, N] where N is the
- number of instances. For each element, `True` means the instance
- corresponds to a positive example.
- negative_matches: A `bool` tensor of shape of [batch, N] where N is the
- number of instances. For each element, `True` means the instance
- corresponds to a negative example.
- ignored_matches: A `bool` tensor of shape of [batch, N] where N is the
- number of instances. For each element, `True` means the instance should
- be ignored.
-
- Returns:
- A `tf.tensor` of shape of [batch_size, K], storing the indices of the
- sampled examples, where K is `num_samples`.
- """
- sample_candidates = tf.logical_and(
- tf.logical_or(positive_matches, negative_matches),
- tf.logical_not(ignored_matches))
-
- sampler = sampling_ops.BalancedPositiveNegativeSampler(
- positive_fraction=self._config_dict['foreground_fraction'],
- is_static=True)
-
- batch_size = sample_candidates.shape[0]
- sampled_indicators = []
- for i in range(batch_size):
- sampled_indicator = sampler.subsample(
- sample_candidates[i],
- self._config_dict['num_samples'],
- positive_matches[i])
- sampled_indicators.append(sampled_indicator)
- sampled_indicators = tf.stack(sampled_indicators)
- _, selected_indices = tf.nn.top_k(
- tf.cast(sampled_indicators, dtype=tf.int32),
- k=self._config_dict['num_samples'],
- sorted=True)
-
- return selected_indices
-
- def get_config(self):
- return self._config_dict
-
- @classmethod
- def from_config(cls, config):
- return cls(**config)
diff --git a/official/vision/beta/modeling/layers/deeplab.py b/official/vision/beta/modeling/layers/deeplab.py
deleted file mode 100644
index d48724f02948482eb32b213ef5669c1c3c94cdc8..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/layers/deeplab.py
+++ /dev/null
@@ -1,211 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Layers for DeepLabV3."""
-
-import tensorflow as tf
-
-
-class SpatialPyramidPooling(tf.keras.layers.Layer):
- """Implements the Atrous Spatial Pyramid Pooling.
-
- References:
- [Rethinking Atrous Convolution for Semantic Image Segmentation](
- https://arxiv.org/pdf/1706.05587.pdf)
- [Encoder-Decoder with Atrous Separable Convolution for Semantic Image
- Segmentation](https://arxiv.org/pdf/1802.02611.pdf)
- """
-
- def __init__(
- self,
- output_channels,
- dilation_rates,
- pool_kernel_size=None,
- use_sync_bn=False,
- batchnorm_momentum=0.99,
- batchnorm_epsilon=0.001,
- activation='relu',
- dropout=0.5,
- kernel_initializer='glorot_uniform',
- kernel_regularizer=None,
- interpolation='bilinear',
- use_depthwise_convolution=False,
- **kwargs):
- """Initializes `SpatialPyramidPooling`.
-
- Args:
- output_channels: Number of channels produced by SpatialPyramidPooling.
- dilation_rates: A list of integers for parallel dilated conv.
- pool_kernel_size: A list of integers or None. If None, global average
- pooling is applied, otherwise an average pooling of pool_kernel_size
- is applied.
- use_sync_bn: A bool, whether or not to use sync batch normalization.
- batchnorm_momentum: A float for the momentum in BatchNorm. Defaults to
- 0.99.
- batchnorm_epsilon: A float for the epsilon value in BatchNorm. Defaults to
- 0.001.
- activation: A `str` for type of activation to be used. Defaults to 'relu'.
- dropout: A float for the dropout rate before output. Defaults to 0.5.
- kernel_initializer: Kernel initializer for conv layers. Defaults to
- `glorot_uniform`.
- kernel_regularizer: Kernel regularizer for conv layers. Defaults to None.
- interpolation: The interpolation method for upsampling. Defaults to
- `bilinear`.
- use_depthwise_convolution: Allows spatial pooling to be separable
- depthwise convolusions. [Encoder-Decoder with Atrous Separable
- Convolution for Semantic Image Segmentation](
- https://arxiv.org/pdf/1802.02611.pdf)
- **kwargs: Other keyword arguments for the layer.
- """
- super(SpatialPyramidPooling, self).__init__(**kwargs)
-
- self.output_channels = output_channels
- self.dilation_rates = dilation_rates
- self.use_sync_bn = use_sync_bn
- self.batchnorm_momentum = batchnorm_momentum
- self.batchnorm_epsilon = batchnorm_epsilon
- self.activation = activation
- self.dropout = dropout
- self.kernel_initializer = tf.keras.initializers.get(kernel_initializer)
- self.kernel_regularizer = tf.keras.regularizers.get(kernel_regularizer)
- self.interpolation = interpolation
- self.input_spec = tf.keras.layers.InputSpec(ndim=4)
- self.pool_kernel_size = pool_kernel_size
- self.use_depthwise_convolution = use_depthwise_convolution
-
- def build(self, input_shape):
- height = input_shape[1]
- width = input_shape[2]
- channels = input_shape[3]
-
- self.aspp_layers = []
-
- if self.use_sync_bn:
- bn_op = tf.keras.layers.experimental.SyncBatchNormalization
- else:
- bn_op = tf.keras.layers.BatchNormalization
-
- if tf.keras.backend.image_data_format() == 'channels_last':
- bn_axis = -1
- else:
- bn_axis = 1
-
- conv_sequential = tf.keras.Sequential([
- tf.keras.layers.Conv2D(
- filters=self.output_channels, kernel_size=(1, 1),
- kernel_initializer=self.kernel_initializer,
- kernel_regularizer=self.kernel_regularizer,
- use_bias=False),
- bn_op(
- axis=bn_axis,
- momentum=self.batchnorm_momentum,
- epsilon=self.batchnorm_epsilon),
- tf.keras.layers.Activation(self.activation)
- ])
- self.aspp_layers.append(conv_sequential)
-
- for dilation_rate in self.dilation_rates:
- leading_layers = []
- kernel_size = (3, 3)
- if self.use_depthwise_convolution:
- leading_layers += [
- tf.keras.layers.DepthwiseConv2D(
- depth_multiplier=1, kernel_size=kernel_size,
- padding='same', depthwise_regularizer=self.kernel_regularizer,
- depthwise_initializer=self.kernel_initializer,
- dilation_rate=dilation_rate, use_bias=False)
- ]
- kernel_size = (1, 1)
- conv_sequential = tf.keras.Sequential(leading_layers + [
- tf.keras.layers.Conv2D(
- filters=self.output_channels, kernel_size=kernel_size,
- padding='same', kernel_regularizer=self.kernel_regularizer,
- kernel_initializer=self.kernel_initializer,
- dilation_rate=dilation_rate, use_bias=False),
- bn_op(axis=bn_axis, momentum=self.batchnorm_momentum,
- epsilon=self.batchnorm_epsilon),
- tf.keras.layers.Activation(self.activation)])
- self.aspp_layers.append(conv_sequential)
-
- if self.pool_kernel_size is None:
- pool_sequential = tf.keras.Sequential([
- tf.keras.layers.GlobalAveragePooling2D(),
- tf.keras.layers.Reshape((1, 1, channels))])
- else:
- pool_sequential = tf.keras.Sequential([
- tf.keras.layers.AveragePooling2D(self.pool_kernel_size)])
-
- pool_sequential.add(
- tf.keras.Sequential([
- tf.keras.layers.Conv2D(
- filters=self.output_channels,
- kernel_size=(1, 1),
- kernel_initializer=self.kernel_initializer,
- kernel_regularizer=self.kernel_regularizer,
- use_bias=False),
- bn_op(
- axis=bn_axis,
- momentum=self.batchnorm_momentum,
- epsilon=self.batchnorm_epsilon),
- tf.keras.layers.Activation(self.activation),
- tf.keras.layers.experimental.preprocessing.Resizing(
- height,
- width,
- interpolation=self.interpolation,
- dtype=tf.float32)
- ]))
-
- self.aspp_layers.append(pool_sequential)
-
- self.projection = tf.keras.Sequential([
- tf.keras.layers.Conv2D(
- filters=self.output_channels, kernel_size=(1, 1),
- kernel_initializer=self.kernel_initializer,
- kernel_regularizer=self.kernel_regularizer,
- use_bias=False),
- bn_op(
- axis=bn_axis,
- momentum=self.batchnorm_momentum,
- epsilon=self.batchnorm_epsilon),
- tf.keras.layers.Activation(self.activation),
- tf.keras.layers.Dropout(rate=self.dropout)])
-
- def call(self, inputs, training=None):
- if training is None:
- training = tf.keras.backend.learning_phase()
- result = []
- for layer in self.aspp_layers:
- result.append(tf.cast(layer(inputs, training=training), inputs.dtype))
- result = tf.concat(result, axis=-1)
- result = self.projection(result, training=training)
- return result
-
- def get_config(self):
- config = {
- 'output_channels': self.output_channels,
- 'dilation_rates': self.dilation_rates,
- 'pool_kernel_size': self.pool_kernel_size,
- 'use_sync_bn': self.use_sync_bn,
- 'batchnorm_momentum': self.batchnorm_momentum,
- 'batchnorm_epsilon': self.batchnorm_epsilon,
- 'activation': self.activation,
- 'dropout': self.dropout,
- 'kernel_initializer': tf.keras.initializers.serialize(
- self.kernel_initializer),
- 'kernel_regularizer': tf.keras.regularizers.serialize(
- self.kernel_regularizer),
- 'interpolation': self.interpolation,
- }
- base_config = super(SpatialPyramidPooling, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
diff --git a/official/vision/beta/modeling/layers/deeplab_test.py b/official/vision/beta/modeling/layers/deeplab_test.py
deleted file mode 100644
index dcb7b1b0caa72222619a6d92a7f96b33969cd8c7..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/layers/deeplab_test.py
+++ /dev/null
@@ -1,53 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for ASPP."""
-
-import tensorflow as tf
-
-from tensorflow.python.keras import keras_parameterized
-from official.vision.beta.modeling.layers import deeplab
-
-
-@keras_parameterized.run_all_keras_modes
-class DeeplabTest(keras_parameterized.TestCase):
-
- @keras_parameterized.parameterized.parameters(
- (None,),
- ([32, 32],),
- )
- def test_aspp(self, pool_kernel_size):
- inputs = tf.keras.Input(shape=(64, 64, 128), dtype=tf.float32)
- layer = deeplab.SpatialPyramidPooling(output_channels=256,
- dilation_rates=[6, 12, 18],
- pool_kernel_size=None)
- output = layer(inputs)
- self.assertAllEqual([None, 64, 64, 256], output.shape)
-
- def test_aspp_invalid_shape(self):
- inputs = tf.keras.Input(shape=(64, 64), dtype=tf.float32)
- layer = deeplab.SpatialPyramidPooling(output_channels=256,
- dilation_rates=[6, 12, 18])
- with self.assertRaises(ValueError):
- _ = layer(inputs)
-
- def test_config_with_custom_name(self):
- layer = deeplab.SpatialPyramidPooling(256, [5], name='aspp')
- config = layer.get_config()
- layer_1 = deeplab.SpatialPyramidPooling.from_config(config)
- self.assertEqual(layer_1.name, layer.name)
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/layers/detection_generator.py b/official/vision/beta/modeling/layers/detection_generator.py
deleted file mode 100644
index 2ccea3dfdc2ce7e4d42283229b01d57b75216e29..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/layers/detection_generator.py
+++ /dev/null
@@ -1,852 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains definitions of generators to generate the final detections."""
-import contextlib
-from typing import List, Optional, Mapping
-# Import libraries
-import tensorflow as tf
-
-from official.vision.beta.ops import box_ops
-from official.vision.beta.ops import nms
-from official.vision.beta.ops import preprocess_ops
-
-
-def _generate_detections_v1(boxes: tf.Tensor,
- scores: tf.Tensor,
- attributes: Optional[Mapping[str,
- tf.Tensor]] = None,
- pre_nms_top_k: int = 5000,
- pre_nms_score_threshold: float = 0.05,
- nms_iou_threshold: float = 0.5,
- max_num_detections: int = 100,
- soft_nms_sigma: Optional[float] = None):
- """Generates the final detections given the model outputs.
-
- The implementation unrolls the batch dimension and process images one by one.
- It required the batch dimension to be statically known and it is TPU
- compatible.
-
- Args:
- boxes: A `tf.Tensor` with shape `[batch_size, N, num_classes, 4]` or
- `[batch_size, N, 1, 4]` for box predictions on all feature levels. The
- N is the number of total anchors on all levels.
- scores: A `tf.Tensor` with shape `[batch_size, N, num_classes]`, which
- stacks class probability on all feature levels. The N is the number of
- total anchors on all levels. The num_classes is the number of classes
- predicted by the model. Note that the class_outputs here is the raw score.
- attributes: None or a dict of (attribute_name, attributes) pairs. Each
- attributes is a `tf.Tensor` with shape
- `[batch_size, N, num_classes, attribute_size]` or
- `[batch_size, N, 1, attribute_size]` for attribute predictions on all
- feature levels. The N is the number of total anchors on all levels. Can
- be None if no attribute learning is required.
- pre_nms_top_k: An `int` number of top candidate detections per class before
- NMS.
- pre_nms_score_threshold: A `float` representing the threshold for deciding
- when to remove boxes based on score.
- nms_iou_threshold: A `float` representing the threshold for deciding whether
- boxes overlap too much with respect to IOU.
- max_num_detections: A scalar representing maximum number of boxes retained
- over all classes.
- soft_nms_sigma: A `float` representing the sigma parameter for Soft NMS.
- When soft_nms_sigma=0.0 (which is default), we fall back to standard NMS.
-
- Returns:
- nms_boxes: A `float` type `tf.Tensor` of shape
- `[batch_size, max_num_detections, 4]` representing top detected boxes in
- `[y1, x1, y2, x2]`.
- nms_scores: A `float` type `tf.Tensor` of shape
- `[batch_size, max_num_detections]` representing sorted confidence scores
- for detected boxes. The values are between `[0, 1]`.
- nms_classes: An `int` type `tf.Tensor` of shape
- `[batch_size, max_num_detections]` representing classes for detected
- boxes.
- valid_detections: An `int` type `tf.Tensor` of shape `[batch_size]` only the
- top `valid_detections` boxes are valid detections.
- nms_attributes: None or a dict of (attribute_name, attributes). Each
- attribute is a `float` type `tf.Tensor` of shape
- `[batch_size, max_num_detections, attribute_size]` representing attribute
- predictions for detected boxes. Can be an empty dict if no attribute
- learning is required.
- """
- with tf.name_scope('generate_detections'):
- batch_size = scores.get_shape().as_list()[0]
- nmsed_boxes = []
- nmsed_classes = []
- nmsed_scores = []
- valid_detections = []
- if attributes:
- nmsed_attributes = {att_name: [] for att_name in attributes.keys()}
- else:
- nmsed_attributes = {}
-
- for i in range(batch_size):
- (nmsed_boxes_i, nmsed_scores_i, nmsed_classes_i, valid_detections_i,
- nmsed_att_i) = _generate_detections_per_image(
- boxes[i],
- scores[i],
- attributes={
- att_name: att[i] for att_name, att in attributes.items()
- } if attributes else {},
- pre_nms_top_k=pre_nms_top_k,
- pre_nms_score_threshold=pre_nms_score_threshold,
- nms_iou_threshold=nms_iou_threshold,
- max_num_detections=max_num_detections,
- soft_nms_sigma=soft_nms_sigma)
- nmsed_boxes.append(nmsed_boxes_i)
- nmsed_scores.append(nmsed_scores_i)
- nmsed_classes.append(nmsed_classes_i)
- valid_detections.append(valid_detections_i)
- if attributes:
- for att_name in attributes.keys():
- nmsed_attributes[att_name].append(nmsed_att_i[att_name])
-
- nmsed_boxes = tf.stack(nmsed_boxes, axis=0)
- nmsed_scores = tf.stack(nmsed_scores, axis=0)
- nmsed_classes = tf.stack(nmsed_classes, axis=0)
- valid_detections = tf.stack(valid_detections, axis=0)
- if attributes:
- for att_name in attributes.keys():
- nmsed_attributes[att_name] = tf.stack(nmsed_attributes[att_name], axis=0)
-
- return nmsed_boxes, nmsed_scores, nmsed_classes, valid_detections, nmsed_attributes
-
-
-def _generate_detections_per_image(
- boxes: tf.Tensor,
- scores: tf.Tensor,
- attributes: Optional[Mapping[str, tf.Tensor]] = None,
- pre_nms_top_k: int = 5000,
- pre_nms_score_threshold: float = 0.05,
- nms_iou_threshold: float = 0.5,
- max_num_detections: int = 100,
- soft_nms_sigma: Optional[float] = None):
- """Generates the final detections per image given the model outputs.
-
- Args:
- boxes: A `tf.Tensor` with shape `[N, num_classes, 4]` or `[N, 1, 4]`, which
- box predictions on all feature levels. The N is the number of total
- anchors on all levels.
- scores: A `tf.Tensor` with shape `[N, num_classes]`, which stacks class
- probability on all feature levels. The N is the number of total anchors on
- all levels. The num_classes is the number of classes predicted by the
- model. Note that the class_outputs here is the raw score.
- attributes: If not None, a dict of `tf.Tensor`. Each value is in shape
- `[N, num_classes, attribute_size]` or `[N, 1, attribute_size]` of
- attribute predictions on all feature levels. The N is the number of total
- anchors on all levels.
- pre_nms_top_k: An `int` number of top candidate detections per class before
- NMS.
- pre_nms_score_threshold: A `float` representing the threshold for deciding
- when to remove boxes based on score.
- nms_iou_threshold: A `float` representing the threshold for deciding whether
- boxes overlap too much with respect to IOU.
- max_num_detections: A `scalar` representing maximum number of boxes retained
- over all classes.
- soft_nms_sigma: A `float` representing the sigma parameter for Soft NMS.
- When soft_nms_sigma=0.0, we fall back to standard NMS.
- If set to None, `tf.image.non_max_suppression_padded` is called instead.
-
- Returns:
- nms_boxes: A `float` tf.Tensor of shape `[max_num_detections, 4]`
- representing top detected boxes in `[y1, x1, y2, x2]`.
- nms_scores: A `float` tf.Tensor of shape `[max_num_detections]` representing
- sorted confidence scores for detected boxes. The values are between [0,
- 1].
- nms_classes: An `int` tf.Tensor of shape `[max_num_detections]` representing
- classes for detected boxes.
- valid_detections: An `int` tf.Tensor of shape [1] only the top
- `valid_detections` boxes are valid detections.
- nms_attributes: None or a dict. Each value is a `float` tf.Tensor of shape
- `[max_num_detections, attribute_size]` representing attribute predictions
- for detected boxes. Can be an empty dict if `attributes` is None.
- """
- nmsed_boxes = []
- nmsed_scores = []
- nmsed_classes = []
- num_classes_for_box = boxes.get_shape().as_list()[1]
- num_classes = scores.get_shape().as_list()[1]
- if attributes:
- nmsed_attributes = {att_name: [] for att_name in attributes.keys()}
- else:
- nmsed_attributes = {}
-
- for i in range(num_classes):
- boxes_i = boxes[:, min(num_classes_for_box - 1, i)]
- scores_i = scores[:, i]
- # Obtains pre_nms_top_k before running NMS.
- scores_i, indices = tf.nn.top_k(
- scores_i, k=tf.minimum(tf.shape(scores_i)[-1], pre_nms_top_k))
- boxes_i = tf.gather(boxes_i, indices)
-
- if soft_nms_sigma is not None:
- (nmsed_indices_i,
- nmsed_scores_i) = tf.image.non_max_suppression_with_scores(
- tf.cast(boxes_i, tf.float32),
- tf.cast(scores_i, tf.float32),
- max_num_detections,
- iou_threshold=nms_iou_threshold,
- score_threshold=pre_nms_score_threshold,
- soft_nms_sigma=soft_nms_sigma,
- name='nms_detections_' + str(i))
- nmsed_boxes_i = tf.gather(boxes_i, nmsed_indices_i)
- nmsed_boxes_i = preprocess_ops.clip_or_pad_to_fixed_size(
- nmsed_boxes_i, max_num_detections, 0.0)
- nmsed_scores_i = preprocess_ops.clip_or_pad_to_fixed_size(
- nmsed_scores_i, max_num_detections, -1.0)
- else:
- (nmsed_indices_i,
- nmsed_num_valid_i) = tf.image.non_max_suppression_padded(
- tf.cast(boxes_i, tf.float32),
- tf.cast(scores_i, tf.float32),
- max_num_detections,
- iou_threshold=nms_iou_threshold,
- score_threshold=pre_nms_score_threshold,
- pad_to_max_output_size=True,
- name='nms_detections_' + str(i))
- nmsed_boxes_i = tf.gather(boxes_i, nmsed_indices_i)
- nmsed_scores_i = tf.gather(scores_i, nmsed_indices_i)
- # Sets scores of invalid boxes to -1.
- nmsed_scores_i = tf.where(
- tf.less(tf.range(max_num_detections), [nmsed_num_valid_i]),
- nmsed_scores_i, -tf.ones_like(nmsed_scores_i))
-
- nmsed_classes_i = tf.fill([max_num_detections], i)
- nmsed_boxes.append(nmsed_boxes_i)
- nmsed_scores.append(nmsed_scores_i)
- nmsed_classes.append(nmsed_classes_i)
- if attributes:
- for att_name, att in attributes.items():
- num_classes_for_attr = att.get_shape().as_list()[1]
- att_i = att[:, min(num_classes_for_attr - 1, i)]
- att_i = tf.gather(att_i, indices)
- nmsed_att_i = tf.gather(att_i, nmsed_indices_i)
- nmsed_att_i = preprocess_ops.clip_or_pad_to_fixed_size(
- nmsed_att_i, max_num_detections, 0.0)
- nmsed_attributes[att_name].append(nmsed_att_i)
-
- # Concats results from all classes and sort them.
- nmsed_boxes = tf.concat(nmsed_boxes, axis=0)
- nmsed_scores = tf.concat(nmsed_scores, axis=0)
- nmsed_classes = tf.concat(nmsed_classes, axis=0)
- nmsed_scores, indices = tf.nn.top_k(
- nmsed_scores, k=max_num_detections, sorted=True)
- nmsed_boxes = tf.gather(nmsed_boxes, indices)
- nmsed_classes = tf.gather(nmsed_classes, indices)
- valid_detections = tf.reduce_sum(
- tf.cast(tf.greater(nmsed_scores, -1), tf.int32))
- if attributes:
- for att_name in attributes.keys():
- nmsed_attributes[att_name] = tf.concat(nmsed_attributes[att_name], axis=0)
- nmsed_attributes[att_name] = tf.gather(nmsed_attributes[att_name],
- indices)
-
- return nmsed_boxes, nmsed_scores, nmsed_classes, valid_detections, nmsed_attributes
-
-
-def _select_top_k_scores(scores_in: tf.Tensor, pre_nms_num_detections: int):
- """Selects top_k scores and indices for each class.
-
- Args:
- scores_in: A `tf.Tensor` with shape `[batch_size, N, num_classes]`, which
- stacks class logit outputs on all feature levels. The N is the number of
- total anchors on all levels. The num_classes is the number of classes
- predicted by the model.
- pre_nms_num_detections: Number of candidates before NMS.
-
- Returns:
- scores and indices: A `tf.Tensor` with shape
- `[batch_size, pre_nms_num_detections, num_classes]`.
- """
- batch_size, num_anchors, num_class = scores_in.get_shape().as_list()
- if batch_size is None:
- batch_size = tf.shape(scores_in)[0]
- scores_trans = tf.transpose(scores_in, perm=[0, 2, 1])
- scores_trans = tf.reshape(scores_trans, [-1, num_anchors])
-
- top_k_scores, top_k_indices = tf.nn.top_k(
- scores_trans, k=pre_nms_num_detections, sorted=True)
-
- top_k_scores = tf.reshape(top_k_scores,
- [batch_size, num_class, pre_nms_num_detections])
- top_k_indices = tf.reshape(top_k_indices,
- [batch_size, num_class, pre_nms_num_detections])
-
- return tf.transpose(top_k_scores,
- [0, 2, 1]), tf.transpose(top_k_indices, [0, 2, 1])
-
-
-def _generate_detections_v2(boxes: tf.Tensor,
- scores: tf.Tensor,
- pre_nms_top_k: int = 5000,
- pre_nms_score_threshold: float = 0.05,
- nms_iou_threshold: float = 0.5,
- max_num_detections: int = 100):
- """Generates the final detections given the model outputs.
-
- This implementation unrolls classes dimension while using the tf.while_loop
- to implement the batched NMS, so that it can be parallelized at the batch
- dimension. It should give better performance comparing to v1 implementation.
- It is TPU compatible.
-
- Args:
- boxes: A `tf.Tensor` with shape `[batch_size, N, num_classes, 4]` or
- `[batch_size, N, 1, 4]`, which box predictions on all feature levels. The
- N is the number of total anchors on all levels.
- scores: A `tf.Tensor` with shape `[batch_size, N, num_classes]`, which
- stacks class probability on all feature levels. The N is the number of
- total anchors on all levels. The num_classes is the number of classes
- predicted by the model. Note that the class_outputs here is the raw score.
- pre_nms_top_k: An `int` number of top candidate detections per class before
- NMS.
- pre_nms_score_threshold: A `float` representing the threshold for deciding
- when to remove boxes based on score.
- nms_iou_threshold: A `float` representing the threshold for deciding whether
- boxes overlap too much with respect to IOU.
- max_num_detections: A `scalar` representing maximum number of boxes retained
- over all classes.
-
- Returns:
- nms_boxes: A `float` tf.Tensor of shape [batch_size, max_num_detections, 4]
- representing top detected boxes in [y1, x1, y2, x2].
- nms_scores: A `float` tf.Tensor of shape [batch_size, max_num_detections]
- representing sorted confidence scores for detected boxes. The values are
- between [0, 1].
- nms_classes: An `int` tf.Tensor of shape [batch_size, max_num_detections]
- representing classes for detected boxes.
- valid_detections: An `int` tf.Tensor of shape [batch_size] only the top
- `valid_detections` boxes are valid detections.
- """
- with tf.name_scope('generate_detections'):
- nmsed_boxes = []
- nmsed_classes = []
- nmsed_scores = []
- valid_detections = []
- batch_size, _, num_classes_for_box, _ = boxes.get_shape().as_list()
- if batch_size is None:
- batch_size = tf.shape(boxes)[0]
- _, total_anchors, num_classes = scores.get_shape().as_list()
- # Selects top pre_nms_num scores and indices before NMS.
- scores, indices = _select_top_k_scores(
- scores, min(total_anchors, pre_nms_top_k))
- for i in range(num_classes):
- boxes_i = boxes[:, :, min(num_classes_for_box - 1, i), :]
- scores_i = scores[:, :, i]
- # Obtains pre_nms_top_k before running NMS.
- boxes_i = tf.gather(boxes_i, indices[:, :, i], batch_dims=1, axis=1)
-
- # Filter out scores.
- boxes_i, scores_i = box_ops.filter_boxes_by_scores(
- boxes_i, scores_i, min_score_threshold=pre_nms_score_threshold)
-
- (nmsed_scores_i, nmsed_boxes_i) = nms.sorted_non_max_suppression_padded(
- tf.cast(scores_i, tf.float32),
- tf.cast(boxes_i, tf.float32),
- max_num_detections,
- iou_threshold=nms_iou_threshold)
- nmsed_classes_i = tf.fill([batch_size, max_num_detections], i)
- nmsed_boxes.append(nmsed_boxes_i)
- nmsed_scores.append(nmsed_scores_i)
- nmsed_classes.append(nmsed_classes_i)
- nmsed_boxes = tf.concat(nmsed_boxes, axis=1)
- nmsed_scores = tf.concat(nmsed_scores, axis=1)
- nmsed_classes = tf.concat(nmsed_classes, axis=1)
- nmsed_scores, indices = tf.nn.top_k(
- nmsed_scores, k=max_num_detections, sorted=True)
- nmsed_boxes = tf.gather(nmsed_boxes, indices, batch_dims=1, axis=1)
- nmsed_classes = tf.gather(nmsed_classes, indices, batch_dims=1)
- valid_detections = tf.reduce_sum(
- input_tensor=tf.cast(tf.greater(nmsed_scores, 0.0), tf.int32), axis=1)
- return nmsed_boxes, nmsed_scores, nmsed_classes, valid_detections
-
-
-def _generate_detections_batched(boxes: tf.Tensor, scores: tf.Tensor,
- pre_nms_score_threshold: float,
- nms_iou_threshold: float,
- max_num_detections: int):
- """Generates detected boxes with scores and classes for one-stage detector.
-
- The function takes output of multi-level ConvNets and anchor boxes and
- generates detected boxes. Note that this used batched nms, which is not
- supported on TPU currently.
-
- Args:
- boxes: A `tf.Tensor` with shape `[batch_size, N, num_classes, 4]` or
- `[batch_size, N, 1, 4]`, which box predictions on all feature levels. The
- N is the number of total anchors on all levels.
- scores: A `tf.Tensor` with shape `[batch_size, N, num_classes]`, which
- stacks class probability on all feature levels. The N is the number of
- total anchors on all levels. The num_classes is the number of classes
- predicted by the model. Note that the class_outputs here is the raw score.
- pre_nms_score_threshold: A `float` representing the threshold for deciding
- when to remove boxes based on score.
- nms_iou_threshold: A `float` representing the threshold for deciding whether
- boxes overlap too much with respect to IOU.
- max_num_detections: A `scalar` representing maximum number of boxes retained
- over all classes.
-
- Returns:
- nms_boxes: A `float` tf.Tensor of shape [batch_size, max_num_detections, 4]
- representing top detected boxes in [y1, x1, y2, x2].
- nms_scores: A `float` tf.Tensor of shape [batch_size, max_num_detections]
- representing sorted confidence scores for detected boxes. The values are
- between [0, 1].
- nms_classes: An `int` tf.Tensor of shape [batch_size, max_num_detections]
- representing classes for detected boxes.
- valid_detections: An `int` tf.Tensor of shape [batch_size] only the top
- `valid_detections` boxes are valid detections.
- """
- with tf.name_scope('generate_detections'):
- nmsed_boxes, nmsed_scores, nmsed_classes, valid_detections = (
- tf.image.combined_non_max_suppression(
- boxes,
- scores,
- max_output_size_per_class=max_num_detections,
- max_total_size=max_num_detections,
- iou_threshold=nms_iou_threshold,
- score_threshold=pre_nms_score_threshold,
- pad_per_class=False,
- clip_boxes=False))
- nmsed_classes = tf.cast(nmsed_classes, tf.int32)
- return nmsed_boxes, nmsed_scores, nmsed_classes, valid_detections
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class DetectionGenerator(tf.keras.layers.Layer):
- """Generates the final detected boxes with scores and classes."""
-
- def __init__(self,
- apply_nms: bool = True,
- pre_nms_top_k: int = 5000,
- pre_nms_score_threshold: float = 0.05,
- nms_iou_threshold: float = 0.5,
- max_num_detections: int = 100,
- nms_version: str = 'v2',
- use_cpu_nms: bool = False,
- soft_nms_sigma: Optional[float] = None,
- **kwargs):
- """Initializes a detection generator.
-
- Args:
- apply_nms: A `bool` of whether or not apply non maximum suppression.
- If False, the decoded boxes and their scores are returned.
- pre_nms_top_k: An `int` of the number of top scores proposals to be kept
- before applying NMS.
- pre_nms_score_threshold: A `float` of the score threshold to apply before
- applying NMS. Proposals whose scores are below this threshold are
- thrown away.
- nms_iou_threshold: A `float` in [0, 1], the NMS IoU threshold.
- max_num_detections: An `int` of the final number of total detections to
- generate.
- nms_version: A string of `batched`, `v1` or `v2` specifies NMS version.
- use_cpu_nms: A `bool` of whether or not enforce NMS to run on CPU.
- soft_nms_sigma: A `float` representing the sigma parameter for Soft NMS.
- When soft_nms_sigma=0.0, we fall back to standard NMS.
- **kwargs: Additional keyword arguments passed to Layer.
- """
- self._config_dict = {
- 'apply_nms': apply_nms,
- 'pre_nms_top_k': pre_nms_top_k,
- 'pre_nms_score_threshold': pre_nms_score_threshold,
- 'nms_iou_threshold': nms_iou_threshold,
- 'max_num_detections': max_num_detections,
- 'nms_version': nms_version,
- 'use_cpu_nms': use_cpu_nms,
- 'soft_nms_sigma': soft_nms_sigma,
- }
- super(DetectionGenerator, self).__init__(**kwargs)
-
- def __call__(self,
- raw_boxes: tf.Tensor,
- raw_scores: tf.Tensor,
- anchor_boxes: tf.Tensor,
- image_shape: tf.Tensor,
- regression_weights: Optional[List[float]] = None,
- bbox_per_class: bool = True):
- """Generates final detections.
-
- Args:
- raw_boxes: A `tf.Tensor` of shape of `[batch_size, K, num_classes * 4]`
- representing the class-specific box coordinates relative to anchors.
- raw_scores: A `tf.Tensor` of shape of `[batch_size, K, num_classes]`
- representing the class logits before applying score activiation.
- anchor_boxes: A `tf.Tensor` of shape of `[batch_size, K, 4]` representing
- the corresponding anchor boxes w.r.t `box_outputs`.
- image_shape: A `tf.Tensor` of shape of `[batch_size, 2]` storing the image
- height and width w.r.t. the scaled image, i.e. the same image space as
- `box_outputs` and `anchor_boxes`.
- regression_weights: A list of four float numbers to scale coordinates.
- bbox_per_class: A `bool`. If True, perform per-class box regression.
-
- Returns:
- If `apply_nms` = True, the return is a dictionary with keys:
- `detection_boxes`: A `float` tf.Tensor of shape
- [batch, max_num_detections, 4] representing top detected boxes in
- [y1, x1, y2, x2].
- `detection_scores`: A `float` `tf.Tensor` of shape
- [batch, max_num_detections] representing sorted confidence scores for
- detected boxes. The values are between [0, 1].
- `detection_classes`: An `int` tf.Tensor of shape
- [batch, max_num_detections] representing classes for detected boxes.
- `num_detections`: An `int` tf.Tensor of shape [batch] only the first
- `num_detections` boxes are valid detections
- If `apply_nms` = False, the return is a dictionary with keys:
- `decoded_boxes`: A `float` tf.Tensor of shape [batch, num_raw_boxes, 4]
- representing all the decoded boxes.
- `decoded_box_scores`: A `float` tf.Tensor of shape
- [batch, num_raw_boxes] representing socres of all the decoded boxes.
- """
- box_scores = tf.nn.softmax(raw_scores, axis=-1)
-
- # Removes the background class.
- box_scores_shape = tf.shape(box_scores)
- box_scores_shape_list = box_scores.get_shape().as_list()
- batch_size = box_scores_shape[0]
- num_locations = box_scores_shape_list[1]
- num_classes = box_scores_shape_list[-1]
-
- box_scores = tf.slice(box_scores, [0, 0, 1], [-1, -1, -1])
-
- if bbox_per_class:
- num_detections = num_locations * (num_classes - 1)
- raw_boxes = tf.reshape(raw_boxes,
- [batch_size, num_locations, num_classes, 4])
- raw_boxes = tf.slice(raw_boxes, [0, 0, 1, 0], [-1, -1, -1, -1])
- anchor_boxes = tf.tile(
- tf.expand_dims(anchor_boxes, axis=2), [1, 1, num_classes - 1, 1])
- raw_boxes = tf.reshape(raw_boxes, [batch_size, num_detections, 4])
- anchor_boxes = tf.reshape(anchor_boxes, [batch_size, num_detections, 4])
-
- # Box decoding.
- decoded_boxes = box_ops.decode_boxes(
- raw_boxes, anchor_boxes, weights=regression_weights)
-
- # Box clipping
- decoded_boxes = box_ops.clip_boxes(
- decoded_boxes, tf.expand_dims(image_shape, axis=1))
-
- if bbox_per_class:
- decoded_boxes = tf.reshape(
- decoded_boxes, [batch_size, num_locations, num_classes - 1, 4])
- else:
- decoded_boxes = tf.expand_dims(decoded_boxes, axis=2)
-
- if not self._config_dict['apply_nms']:
- return {
- 'decoded_boxes': decoded_boxes,
- 'decoded_box_scores': box_scores,
- }
-
- # Optionally force the NMS be run on CPU.
- if self._config_dict['use_cpu_nms']:
- nms_context = tf.device('cpu:0')
- else:
- nms_context = contextlib.nullcontext()
-
- with nms_context:
- if self._config_dict['nms_version'] == 'batched':
- (nmsed_boxes, nmsed_scores, nmsed_classes, valid_detections) = (
- _generate_detections_batched(
- decoded_boxes, box_scores,
- self._config_dict['pre_nms_score_threshold'],
- self._config_dict['nms_iou_threshold'],
- self._config_dict['max_num_detections']))
- elif self._config_dict['nms_version'] == 'v1':
- (nmsed_boxes, nmsed_scores, nmsed_classes, valid_detections, _) = (
- _generate_detections_v1(
- decoded_boxes,
- box_scores,
- pre_nms_top_k=self._config_dict['pre_nms_top_k'],
- pre_nms_score_threshold=self
- ._config_dict['pre_nms_score_threshold'],
- nms_iou_threshold=self._config_dict['nms_iou_threshold'],
- max_num_detections=self._config_dict['max_num_detections'],
- soft_nms_sigma=self._config_dict['soft_nms_sigma']))
- elif self._config_dict['nms_version'] == 'v2':
- (nmsed_boxes, nmsed_scores, nmsed_classes, valid_detections) = (
- _generate_detections_v2(
- decoded_boxes,
- box_scores,
- pre_nms_top_k=self._config_dict['pre_nms_top_k'],
- pre_nms_score_threshold=self
- ._config_dict['pre_nms_score_threshold'],
- nms_iou_threshold=self._config_dict['nms_iou_threshold'],
- max_num_detections=self._config_dict['max_num_detections']))
- else:
- raise ValueError('NMS version {} not supported.'.format(
- self._config_dict['nms_version']))
-
- # Adds 1 to offset the background class which has index 0.
- nmsed_classes += 1
-
- return {
- 'num_detections': valid_detections,
- 'detection_boxes': nmsed_boxes,
- 'detection_classes': nmsed_classes,
- 'detection_scores': nmsed_scores,
- }
-
- def get_config(self):
- return self._config_dict
-
- @classmethod
- def from_config(cls, config):
- return cls(**config)
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class MultilevelDetectionGenerator(tf.keras.layers.Layer):
- """Generates detected boxes with scores and classes for one-stage detector."""
-
- def __init__(self,
- apply_nms: bool = True,
- pre_nms_top_k: int = 5000,
- pre_nms_score_threshold: float = 0.05,
- nms_iou_threshold: float = 0.5,
- max_num_detections: int = 100,
- nms_version: str = 'v1',
- use_cpu_nms: bool = False,
- soft_nms_sigma: Optional[float] = None,
- **kwargs):
- """Initializes a multi-level detection generator.
-
- Args:
- apply_nms: A `bool` of whether or not apply non maximum suppression. If
- False, the decoded boxes and their scores are returned.
- pre_nms_top_k: An `int` of the number of top scores proposals to be kept
- before applying NMS.
- pre_nms_score_threshold: A `float` of the score threshold to apply before
- applying NMS. Proposals whose scores are below this threshold are thrown
- away.
- nms_iou_threshold: A `float` in [0, 1], the NMS IoU threshold.
- max_num_detections: An `int` of the final number of total detections to
- generate.
- nms_version: A string of `batched`, `v1` or `v2` specifies NMS version
- use_cpu_nms: A `bool` of whether or not enforce NMS to run on CPU.
- soft_nms_sigma: A `float` representing the sigma parameter for Soft NMS.
- When soft_nms_sigma=0.0, we fall back to standard NMS.
- **kwargs: Additional keyword arguments passed to Layer.
- """
- self._config_dict = {
- 'apply_nms': apply_nms,
- 'pre_nms_top_k': pre_nms_top_k,
- 'pre_nms_score_threshold': pre_nms_score_threshold,
- 'nms_iou_threshold': nms_iou_threshold,
- 'max_num_detections': max_num_detections,
- 'nms_version': nms_version,
- 'use_cpu_nms': use_cpu_nms,
- 'soft_nms_sigma': soft_nms_sigma,
- }
- super(MultilevelDetectionGenerator, self).__init__(**kwargs)
-
- def _decode_multilevel_outputs(
- self,
- raw_boxes: Mapping[str, tf.Tensor],
- raw_scores: Mapping[str, tf.Tensor],
- anchor_boxes: tf.Tensor,
- image_shape: tf.Tensor,
- raw_attributes: Optional[Mapping[str, tf.Tensor]] = None):
- """Collects dict of multilevel boxes, scores, attributes into lists."""
- boxes = []
- scores = []
- if raw_attributes:
- attributes = {att_name: [] for att_name in raw_attributes.keys()}
- else:
- attributes = {}
-
- levels = list(raw_boxes.keys())
- min_level = int(min(levels))
- max_level = int(max(levels))
- for i in range(min_level, max_level + 1):
- raw_boxes_i = raw_boxes[str(i)]
- raw_scores_i = raw_scores[str(i)]
- batch_size = tf.shape(raw_boxes_i)[0]
- (_, feature_h_i, feature_w_i,
- num_anchors_per_locations_times_4) = raw_boxes_i.get_shape().as_list()
- num_locations = feature_h_i * feature_w_i
- num_anchors_per_locations = num_anchors_per_locations_times_4 // 4
- num_classes = raw_scores_i.get_shape().as_list(
- )[-1] // num_anchors_per_locations
-
- # Applies score transformation and remove the implicit background class.
- scores_i = tf.sigmoid(
- tf.reshape(raw_scores_i, [
- batch_size, num_locations * num_anchors_per_locations, num_classes
- ]))
- scores_i = tf.slice(scores_i, [0, 0, 1], [-1, -1, -1])
-
- # Box decoding.
- # The anchor boxes are shared for all data in a batch.
- # One stage detector only supports class agnostic box regression.
- anchor_boxes_i = tf.reshape(
- anchor_boxes[str(i)],
- [batch_size, num_locations * num_anchors_per_locations, 4])
- raw_boxes_i = tf.reshape(
- raw_boxes_i,
- [batch_size, num_locations * num_anchors_per_locations, 4])
- boxes_i = box_ops.decode_boxes(raw_boxes_i, anchor_boxes_i)
-
- # Box clipping.
- boxes_i = box_ops.clip_boxes(
- boxes_i, tf.expand_dims(image_shape, axis=1))
-
- boxes.append(boxes_i)
- scores.append(scores_i)
-
- if raw_attributes:
- for att_name, raw_att in raw_attributes.items():
- attribute_size = raw_att[str(
- i)].get_shape().as_list()[-1] // num_anchors_per_locations
- att_i = tf.reshape(raw_att[str(i)], [
- batch_size, num_locations * num_anchors_per_locations,
- attribute_size
- ])
- attributes[att_name].append(att_i)
-
- boxes = tf.concat(boxes, axis=1)
- boxes = tf.expand_dims(boxes, axis=2)
- scores = tf.concat(scores, axis=1)
-
- if raw_attributes:
- for att_name in raw_attributes.keys():
- attributes[att_name] = tf.concat(attributes[att_name], axis=1)
- attributes[att_name] = tf.expand_dims(attributes[att_name], axis=2)
-
- return boxes, scores, attributes
-
- def __call__(self,
- raw_boxes: Mapping[str, tf.Tensor],
- raw_scores: Mapping[str, tf.Tensor],
- anchor_boxes: tf.Tensor,
- image_shape: tf.Tensor,
- raw_attributes: Optional[Mapping[str, tf.Tensor]] = None):
- """Generates final detections.
-
- Args:
- raw_boxes: A `dict` with keys representing FPN levels and values
- representing box tenors of shape `[batch, feature_h, feature_w,
- num_anchors * 4]`.
- raw_scores: A `dict` with keys representing FPN levels and values
- representing logit tensors of shape `[batch, feature_h, feature_w,
- num_anchors]`.
- anchor_boxes: A `tf.Tensor` of shape of [batch_size, K, 4] representing
- the corresponding anchor boxes w.r.t `box_outputs`.
- image_shape: A `tf.Tensor` of shape of [batch_size, 2] storing the image
- height and width w.r.t. the scaled image, i.e. the same image space as
- `box_outputs` and `anchor_boxes`.
- raw_attributes: If not None, a `dict` of (attribute_name,
- attribute_prediction) pairs. `attribute_prediction` is a dict that
- contains keys representing FPN levels and values representing tenors of
- shape `[batch, feature_h, feature_w, num_anchors * attribute_size]`.
-
- Returns:
- If `apply_nms` = True, the return is a dictionary with keys:
- `detection_boxes`: A `float` tf.Tensor of shape
- [batch, max_num_detections, 4] representing top detected boxes in
- [y1, x1, y2, x2].
- `detection_scores`: A `float` tf.Tensor of shape
- [batch, max_num_detections] representing sorted confidence scores for
- detected boxes. The values are between [0, 1].
- `detection_classes`: An `int` tf.Tensor of shape
- [batch, max_num_detections] representing classes for detected boxes.
- `num_detections`: An `int` tf.Tensor of shape [batch] only the first
- `num_detections` boxes are valid detections
- `detection_attributes`: A dict. Values of the dict is a `float`
- tf.Tensor of shape [batch, max_num_detections, attribute_size]
- representing attribute predictions for detected boxes.
- If `apply_nms` = False, the return is a dictionary with keys:
- `decoded_boxes`: A `float` tf.Tensor of shape [batch, num_raw_boxes, 4]
- representing all the decoded boxes.
- `decoded_box_scores`: A `float` tf.Tensor of shape
- [batch, num_raw_boxes] representing socres of all the decoded boxes.
- `decoded_box_attributes`: A dict. Values in the dict is a
- `float` tf.Tensor of shape [batch, num_raw_boxes, attribute_size]
- representing attribute predictions of all the decoded boxes.
- """
- boxes, scores, attributes = self._decode_multilevel_outputs(
- raw_boxes, raw_scores, anchor_boxes, image_shape, raw_attributes)
-
- if not self._config_dict['apply_nms']:
- return {
- 'decoded_boxes': boxes,
- 'decoded_box_scores': scores,
- 'decoded_box_attributes': attributes,
- }
-
- # Optionally force the NMS to run on CPU.
- if self._config_dict['use_cpu_nms']:
- nms_context = tf.device('cpu:0')
- else:
- nms_context = contextlib.nullcontext()
-
- with nms_context:
- if raw_attributes and (self._config_dict['nms_version'] != 'v1'):
- raise ValueError(
- 'Attribute learning is only supported for NMSv1 but NMS {} is used.'
- .format(self._config_dict['nms_version']))
- if self._config_dict['nms_version'] == 'batched':
- (nmsed_boxes, nmsed_scores, nmsed_classes, valid_detections) = (
- _generate_detections_batched(
- boxes, scores, self._config_dict['pre_nms_score_threshold'],
- self._config_dict['nms_iou_threshold'],
- self._config_dict['max_num_detections']))
- # Set `nmsed_attributes` to None for batched NMS.
- nmsed_attributes = {}
- elif self._config_dict['nms_version'] == 'v1':
- (nmsed_boxes, nmsed_scores, nmsed_classes, valid_detections,
- nmsed_attributes) = (
- _generate_detections_v1(
- boxes,
- scores,
- attributes=attributes if raw_attributes else None,
- pre_nms_top_k=self._config_dict['pre_nms_top_k'],
- pre_nms_score_threshold=self
- ._config_dict['pre_nms_score_threshold'],
- nms_iou_threshold=self._config_dict['nms_iou_threshold'],
- max_num_detections=self._config_dict['max_num_detections'],
- soft_nms_sigma=self._config_dict['soft_nms_sigma']))
- elif self._config_dict['nms_version'] == 'v2':
- (nmsed_boxes, nmsed_scores, nmsed_classes, valid_detections) = (
- _generate_detections_v2(
- boxes,
- scores,
- pre_nms_top_k=self._config_dict['pre_nms_top_k'],
- pre_nms_score_threshold=self
- ._config_dict['pre_nms_score_threshold'],
- nms_iou_threshold=self._config_dict['nms_iou_threshold'],
- max_num_detections=self._config_dict['max_num_detections']))
- # Set `nmsed_attributes` to None for v2.
- nmsed_attributes = {}
- else:
- raise ValueError('NMS version {} not supported.'.format(
- self._config_dict['nms_version']))
-
- # Adds 1 to offset the background class which has index 0.
- nmsed_classes += 1
-
- return {
- 'num_detections': valid_detections,
- 'detection_boxes': nmsed_boxes,
- 'detection_classes': nmsed_classes,
- 'detection_scores': nmsed_scores,
- 'detection_attributes': nmsed_attributes,
- }
-
- def get_config(self):
- return self._config_dict
-
- @classmethod
- def from_config(cls, config):
- return cls(**config)
diff --git a/official/vision/beta/modeling/layers/detection_generator_test.py b/official/vision/beta/modeling/layers/detection_generator_test.py
deleted file mode 100644
index 1b72f969acb9c2a235c1d406fe961c0b0edc0f8f..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/layers/detection_generator_test.py
+++ /dev/null
@@ -1,249 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for detection_generator.py."""
-# Import libraries
-
-from absl.testing import parameterized
-import numpy as np
-import tensorflow as tf
-
-from official.vision.beta.modeling.layers import detection_generator
-from official.vision.beta.ops import anchor
-
-
-class SelectTopKScoresTest(tf.test.TestCase):
-
- def testSelectTopKScores(self):
- pre_nms_num_boxes = 2
- scores_data = [[[0.2, 0.2], [0.1, 0.9], [0.5, 0.1], [0.3, 0.5]]]
- scores_in = tf.constant(scores_data, dtype=tf.float32)
- top_k_scores, top_k_indices = detection_generator._select_top_k_scores(
- scores_in, pre_nms_num_detections=pre_nms_num_boxes)
- expected_top_k_scores = np.array([[[0.5, 0.9], [0.3, 0.5]]],
- dtype=np.float32)
-
- expected_top_k_indices = [[[2, 1], [3, 3]]]
-
- self.assertAllEqual(top_k_scores.numpy(), expected_top_k_scores)
- self.assertAllEqual(top_k_indices.numpy(), expected_top_k_indices)
-
-
-class DetectionGeneratorTest(
- parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.product(
- nms_version=['batched', 'v1', 'v2'],
- use_cpu_nms=[True, False],
- soft_nms_sigma=[None, 0.1])
- def testDetectionsOutputShape(self, nms_version, use_cpu_nms, soft_nms_sigma):
- max_num_detections = 10
- num_classes = 4
- pre_nms_top_k = 5000
- pre_nms_score_threshold = 0.01
- batch_size = 1
- kwargs = {
- 'apply_nms': True,
- 'pre_nms_top_k': pre_nms_top_k,
- 'pre_nms_score_threshold': pre_nms_score_threshold,
- 'nms_iou_threshold': 0.5,
- 'max_num_detections': max_num_detections,
- 'nms_version': nms_version,
- 'use_cpu_nms': use_cpu_nms,
- 'soft_nms_sigma': soft_nms_sigma,
- }
- generator = detection_generator.DetectionGenerator(**kwargs)
-
- cls_outputs_all = (
- np.random.rand(84, num_classes) - 0.5) * 3 # random 84x3 outputs.
- box_outputs_all = np.random.rand(84, 4 * num_classes) # random 84 boxes.
- anchor_boxes_all = np.random.rand(84, 4) # random 84 boxes.
- class_outputs = tf.reshape(
- tf.convert_to_tensor(cls_outputs_all, dtype=tf.float32),
- [1, 84, num_classes])
- box_outputs = tf.reshape(
- tf.convert_to_tensor(box_outputs_all, dtype=tf.float32),
- [1, 84, 4 * num_classes])
- anchor_boxes = tf.reshape(
- tf.convert_to_tensor(anchor_boxes_all, dtype=tf.float32),
- [1, 84, 4])
- image_info = tf.constant(
- [[[1000, 1000], [100, 100], [0.1, 0.1], [0, 0]]],
- dtype=tf.float32)
- results = generator(
- box_outputs, class_outputs, anchor_boxes, image_info[:, 1, :])
- boxes = results['detection_boxes']
- classes = results['detection_classes']
- scores = results['detection_scores']
- valid_detections = results['num_detections']
-
- self.assertEqual(boxes.numpy().shape, (batch_size, max_num_detections, 4))
- self.assertEqual(scores.numpy().shape, (batch_size, max_num_detections,))
- self.assertEqual(classes.numpy().shape, (batch_size, max_num_detections,))
- self.assertEqual(valid_detections.numpy().shape, (batch_size,))
-
- def test_serialize_deserialize(self):
- kwargs = {
- 'apply_nms': True,
- 'pre_nms_top_k': 1000,
- 'pre_nms_score_threshold': 0.1,
- 'nms_iou_threshold': 0.5,
- 'max_num_detections': 10,
- 'nms_version': 'v2',
- 'use_cpu_nms': False,
- 'soft_nms_sigma': None,
- }
- generator = detection_generator.DetectionGenerator(**kwargs)
-
- expected_config = dict(kwargs)
- self.assertEqual(generator.get_config(), expected_config)
-
- new_generator = (
- detection_generator.DetectionGenerator.from_config(
- generator.get_config()))
-
- self.assertAllEqual(generator.get_config(), new_generator.get_config())
-
-
-class MultilevelDetectionGeneratorTest(
- parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- ('batched', False, True, None),
- ('batched', False, False, None),
- ('v2', False, True, None),
- ('v2', False, False, None),
- ('v1', True, True, 0.0),
- ('v1', True, False, 0.1),
- ('v1', True, False, None),
- )
- def testDetectionsOutputShape(self, nms_version, has_att_heads, use_cpu_nms,
- soft_nms_sigma):
- min_level = 4
- max_level = 6
- num_scales = 2
- max_num_detections = 10
- aspect_ratios = [1.0, 2.0]
- anchor_scale = 2.0
- output_size = [64, 64]
- num_classes = 4
- pre_nms_top_k = 5000
- pre_nms_score_threshold = 0.01
- batch_size = 1
- kwargs = {
- 'apply_nms': True,
- 'pre_nms_top_k': pre_nms_top_k,
- 'pre_nms_score_threshold': pre_nms_score_threshold,
- 'nms_iou_threshold': 0.5,
- 'max_num_detections': max_num_detections,
- 'nms_version': nms_version,
- 'use_cpu_nms': use_cpu_nms,
- 'soft_nms_sigma': soft_nms_sigma,
- }
-
- input_anchor = anchor.build_anchor_generator(min_level, max_level,
- num_scales, aspect_ratios,
- anchor_scale)
- anchor_boxes = input_anchor(output_size)
- cls_outputs_all = (
- np.random.rand(84, num_classes) - 0.5) * 3 # random 84x3 outputs.
- box_outputs_all = np.random.rand(84, 4) # random 84 boxes.
- class_outputs = {
- '4':
- tf.reshape(
- tf.convert_to_tensor(cls_outputs_all[0:64], dtype=tf.float32),
- [1, 8, 8, num_classes]),
- '5':
- tf.reshape(
- tf.convert_to_tensor(cls_outputs_all[64:80], dtype=tf.float32),
- [1, 4, 4, num_classes]),
- '6':
- tf.reshape(
- tf.convert_to_tensor(cls_outputs_all[80:84], dtype=tf.float32),
- [1, 2, 2, num_classes]),
- }
- box_outputs = {
- '4': tf.reshape(tf.convert_to_tensor(
- box_outputs_all[0:64], dtype=tf.float32), [1, 8, 8, 4]),
- '5': tf.reshape(tf.convert_to_tensor(
- box_outputs_all[64:80], dtype=tf.float32), [1, 4, 4, 4]),
- '6': tf.reshape(tf.convert_to_tensor(
- box_outputs_all[80:84], dtype=tf.float32), [1, 2, 2, 4]),
- }
- if has_att_heads:
- att_outputs_all = np.random.rand(84, 1) # random attributes.
- att_outputs = {
- 'depth': {
- '4':
- tf.reshape(
- tf.convert_to_tensor(
- att_outputs_all[0:64], dtype=tf.float32),
- [1, 8, 8, 1]),
- '5':
- tf.reshape(
- tf.convert_to_tensor(
- att_outputs_all[64:80], dtype=tf.float32),
- [1, 4, 4, 1]),
- '6':
- tf.reshape(
- tf.convert_to_tensor(
- att_outputs_all[80:84], dtype=tf.float32),
- [1, 2, 2, 1]),
- }
- }
- else:
- att_outputs = None
- image_info = tf.constant([[[1000, 1000], [100, 100], [0.1, 0.1], [0, 0]]],
- dtype=tf.float32)
- generator = detection_generator.MultilevelDetectionGenerator(**kwargs)
- results = generator(box_outputs, class_outputs, anchor_boxes,
- image_info[:, 1, :], att_outputs)
- boxes = results['detection_boxes']
- classes = results['detection_classes']
- scores = results['detection_scores']
- valid_detections = results['num_detections']
-
- self.assertEqual(boxes.numpy().shape, (batch_size, max_num_detections, 4))
- self.assertEqual(scores.numpy().shape, (batch_size, max_num_detections,))
- self.assertEqual(classes.numpy().shape, (batch_size, max_num_detections,))
- self.assertEqual(valid_detections.numpy().shape, (batch_size,))
- if has_att_heads:
- for att in results['detection_attributes'].values():
- self.assertEqual(att.numpy().shape, (batch_size, max_num_detections, 1))
-
- def test_serialize_deserialize(self):
- kwargs = {
- 'apply_nms': True,
- 'pre_nms_top_k': 1000,
- 'pre_nms_score_threshold': 0.1,
- 'nms_iou_threshold': 0.5,
- 'max_num_detections': 10,
- 'nms_version': 'v2',
- 'use_cpu_nms': False,
- 'soft_nms_sigma': None,
- }
- generator = detection_generator.MultilevelDetectionGenerator(**kwargs)
-
- expected_config = dict(kwargs)
- self.assertEqual(generator.get_config(), expected_config)
-
- new_generator = (
- detection_generator.MultilevelDetectionGenerator.from_config(
- generator.get_config()))
-
- self.assertAllEqual(generator.get_config(), new_generator.get_config())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/layers/mask_sampler.py b/official/vision/beta/modeling/layers/mask_sampler.py
deleted file mode 100644
index 68b185b856c7fe289d9bd9bf0f2bba61408f0d86..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/layers/mask_sampler.py
+++ /dev/null
@@ -1,166 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains definitions of mask sampler."""
-
-# Import libraries
-import tensorflow as tf
-
-from official.vision.beta.ops import spatial_transform_ops
-
-
-def _sample_and_crop_foreground_masks(candidate_rois: tf.Tensor,
- candidate_gt_boxes: tf.Tensor,
- candidate_gt_classes: tf.Tensor,
- candidate_gt_indices: tf.Tensor,
- gt_masks: tf.Tensor,
- num_sampled_masks: int = 128,
- mask_target_size: int = 28):
- """Samples and creates cropped foreground masks for training.
-
- Args:
- candidate_rois: A `tf.Tensor` of shape of [batch_size, N, 4], where N is the
- number of candidate RoIs to be considered for mask sampling. It includes
- both positive and negative RoIs. The `num_mask_samples_per_image` positive
- RoIs will be sampled to create mask training targets.
- candidate_gt_boxes: A `tf.Tensor` of shape of [batch_size, N, 4], storing
- the corresponding groundtruth boxes to the `candidate_rois`.
- candidate_gt_classes: A `tf.Tensor` of shape of [batch_size, N], storing the
- corresponding groundtruth classes to the `candidate_rois`. 0 in the tensor
- corresponds to the background class, i.e. negative RoIs.
- candidate_gt_indices: A `tf.Tensor` of shape [batch_size, N], storing the
- corresponding groundtruth instance indices to the `candidate_gt_boxes`,
- i.e. gt_boxes[candidate_gt_indices[:, i]] = candidate_gt_boxes[:, i] and
- gt_boxes which is of shape [batch_size, MAX_INSTANCES, 4], M >= N, is
- the superset of candidate_gt_boxes.
- gt_masks: A `tf.Tensor` of [batch_size, MAX_INSTANCES, mask_height,
- mask_width] containing all the groundtruth masks which sample masks are
- drawn from.
- num_sampled_masks: An `int` that specifies the number of masks to sample.
- mask_target_size: An `int` that specifies the final cropped mask size after
- sampling. The output masks are resized w.r.t the sampled RoIs.
-
- Returns:
- foreground_rois: A `tf.Tensor` of shape of [batch_size, K, 4] storing the
- RoI that corresponds to the sampled foreground masks, where
- K = num_mask_samples_per_image.
- foreground_classes: A `tf.Tensor` of shape of [batch_size, K] storing the
- classes corresponding to the sampled foreground masks.
- cropoped_foreground_masks: A `tf.Tensor` of shape of
- [batch_size, K, mask_target_size, mask_target_size] storing the cropped
- foreground masks used for training.
- """
- _, fg_instance_indices = tf.nn.top_k(
- tf.cast(tf.greater(candidate_gt_classes, 0), dtype=tf.int32),
- k=num_sampled_masks)
-
- fg_instance_indices_shape = tf.shape(fg_instance_indices)
- batch_indices = (
- tf.expand_dims(tf.range(fg_instance_indices_shape[0]), axis=-1) *
- tf.ones([1, fg_instance_indices_shape[-1]], dtype=tf.int32))
-
- gather_nd_instance_indices = tf.stack(
- [batch_indices, fg_instance_indices], axis=-1)
- foreground_rois = tf.gather_nd(
- candidate_rois, gather_nd_instance_indices)
- foreground_boxes = tf.gather_nd(
- candidate_gt_boxes, gather_nd_instance_indices)
- foreground_classes = tf.gather_nd(
- candidate_gt_classes, gather_nd_instance_indices)
- foreground_gt_indices = tf.gather_nd(
- candidate_gt_indices, gather_nd_instance_indices)
- foreground_gt_indices = tf.where(
- tf.equal(foreground_gt_indices, -1),
- tf.zeros_like(foreground_gt_indices),
- foreground_gt_indices)
-
- foreground_gt_indices_shape = tf.shape(foreground_gt_indices)
- batch_indices = (
- tf.expand_dims(tf.range(foreground_gt_indices_shape[0]), axis=-1) *
- tf.ones([1, foreground_gt_indices_shape[-1]], dtype=tf.int32))
- gather_nd_gt_indices = tf.stack(
- [batch_indices, foreground_gt_indices], axis=-1)
- foreground_masks = tf.gather_nd(gt_masks, gather_nd_gt_indices)
-
- cropped_foreground_masks = spatial_transform_ops.crop_mask_in_target_box(
- foreground_masks, foreground_boxes, foreground_rois, mask_target_size,
- sample_offset=0.5)
-
- return foreground_rois, foreground_classes, cropped_foreground_masks
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class MaskSampler(tf.keras.layers.Layer):
- """Samples and creates mask training targets."""
-
- def __init__(self, mask_target_size: int, num_sampled_masks: int, **kwargs):
- self._config_dict = {
- 'mask_target_size': mask_target_size,
- 'num_sampled_masks': num_sampled_masks,
- }
- super(MaskSampler, self).__init__(**kwargs)
-
- def call(self, candidate_rois: tf.Tensor, candidate_gt_boxes: tf.Tensor,
- candidate_gt_classes: tf.Tensor, candidate_gt_indices: tf.Tensor,
- gt_masks: tf.Tensor):
- """Samples and creates mask targets for training.
-
- Args:
- candidate_rois: A `tf.Tensor` of shape of [batch_size, N, 4], where N is
- the number of candidate RoIs to be considered for mask sampling. It
- includes both positive and negative RoIs. The
- `num_mask_samples_per_image` positive RoIs will be sampled to create
- mask training targets.
- candidate_gt_boxes: A `tf.Tensor` of shape of [batch_size, N, 4], storing
- the corresponding groundtruth boxes to the `candidate_rois`.
- candidate_gt_classes: A `tf.Tensor` of shape of [batch_size, N], storing
- the corresponding groundtruth classes to the `candidate_rois`. 0 in the
- tensor corresponds to the background class, i.e. negative RoIs.
- candidate_gt_indices: A `tf.Tensor` of shape [batch_size, N], storing the
- corresponding groundtruth instance indices to the `candidate_gt_boxes`,
- i.e. gt_boxes[candidate_gt_indices[:, i]] = candidate_gt_boxes[:, i],
- where gt_boxes which is of shape [batch_size, MAX_INSTANCES, 4], M >=
- N, is the superset of candidate_gt_boxes.
- gt_masks: A `tf.Tensor` of [batch_size, MAX_INSTANCES, mask_height,
- mask_width] containing all the groundtruth masks which sample masks are
- drawn from. after sampling. The output masks are resized w.r.t the
- sampled RoIs.
-
- Returns:
- foreground_rois: A `tf.Tensor` of shape of [batch_size, K, 4] storing the
- RoI that corresponds to the sampled foreground masks, where
- K = num_mask_samples_per_image.
- foreground_classes: A `tf.Tensor` of shape of [batch_size, K] storing the
- classes corresponding to the sampled foreground masks.
- cropoped_foreground_masks: A `tf.Tensor` of shape of
- [batch_size, K, mask_target_size, mask_target_size] storing the
- cropped foreground masks used for training.
- """
- foreground_rois, foreground_classes, cropped_foreground_masks = (
- _sample_and_crop_foreground_masks(
- candidate_rois,
- candidate_gt_boxes,
- candidate_gt_classes,
- candidate_gt_indices,
- gt_masks,
- self._config_dict['num_sampled_masks'],
- self._config_dict['mask_target_size']))
- return foreground_rois, foreground_classes, cropped_foreground_masks
-
- def get_config(self):
- return self._config_dict
-
- @classmethod
- def from_config(cls, config):
- return cls(**config)
diff --git a/official/vision/beta/modeling/layers/nn_blocks.py b/official/vision/beta/modeling/layers/nn_blocks.py
deleted file mode 100644
index f5cd79e2db0a678e860c3862aad5d14efae1104b..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/layers/nn_blocks.py
+++ /dev/null
@@ -1,1512 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains common building blocks for neural networks."""
-
-from typing import Any, Callable, Dict, List, Optional, Tuple, Union, Text
-
-# Import libraries
-from absl import logging
-import tensorflow as tf
-
-from official.modeling import tf_utils
-from official.vision.beta.modeling.layers import nn_layers
-
-
-def _pad_strides(strides: int, axis: int) -> Tuple[int, int, int, int]:
- """Converts int to len 4 strides (`tf.nn.avg_pool` uses length 4)."""
- if axis == 1:
- return (1, 1, strides, strides)
- else:
- return (1, strides, strides, 1)
-
-
-def _maybe_downsample(x: tf.Tensor, out_filter: int, strides: int,
- axis: int) -> tf.Tensor:
- """Downsamples feature map and 0-pads tensor if in_filter != out_filter."""
- data_format = 'NCHW' if axis == 1 else 'NHWC'
- strides = _pad_strides(strides, axis=axis)
-
- x = tf.nn.avg_pool(x, strides, strides, 'VALID', data_format=data_format)
-
- in_filter = x.shape[axis]
- if in_filter < out_filter:
- # Pad on channel dimension with 0s: half on top half on bottom.
- pad_size = [(out_filter - in_filter) // 2, (out_filter - in_filter) // 2]
- if axis == 1:
- x = tf.pad(x, [[0, 0], pad_size, [0, 0], [0, 0]])
- else:
- x = tf.pad(x, [[0, 0], [0, 0], [0, 0], pad_size])
-
- return x + 0.
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class ResidualBlock(tf.keras.layers.Layer):
- """A residual block."""
-
- def __init__(self,
- filters,
- strides,
- use_projection=False,
- se_ratio=None,
- resnetd_shortcut=False,
- stochastic_depth_drop_rate=None,
- kernel_initializer='VarianceScaling',
- kernel_regularizer=None,
- bias_regularizer=None,
- activation='relu',
- use_explicit_padding: bool = False,
- use_sync_bn=False,
- norm_momentum=0.99,
- norm_epsilon=0.001,
- bn_trainable=True,
- **kwargs):
- """Initializes a residual block with BN after convolutions.
-
- Args:
- filters: An `int` number of filters for the first two convolutions. Note
- that the third and final convolution will use 4 times as many filters.
- strides: An `int` block stride. If greater than 1, this block will
- ultimately downsample the input.
- use_projection: A `bool` for whether this block should use a projection
- shortcut (versus the default identity shortcut). This is usually `True`
- for the first block of a block group, which may change the number of
- filters and the resolution.
- se_ratio: A `float` or None. Ratio of the Squeeze-and-Excitation layer.
- resnetd_shortcut: A `bool` if True, apply the resnetd style modification
- to the shortcut connection. Not implemented in residual blocks.
- stochastic_depth_drop_rate: A `float` or None. if not None, drop rate for
- the stochastic depth layer.
- kernel_initializer: A `str` of kernel_initializer for convolutional
- layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default to None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2d.
- Default to None.
- activation: A `str` name of the activation function.
- use_explicit_padding: Use 'VALID' padding for convolutions, but prepad
- inputs so that the output dimensions are the same as if 'SAME' padding
- were used.
- use_sync_bn: A `bool`. If True, use synchronized batch normalization.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- bn_trainable: A `bool` that indicates whether batch norm layers should be
- trainable. Default to True.
- **kwargs: Additional keyword arguments to be passed.
- """
- super(ResidualBlock, self).__init__(**kwargs)
-
- self._filters = filters
- self._strides = strides
- self._use_projection = use_projection
- self._se_ratio = se_ratio
- self._resnetd_shortcut = resnetd_shortcut
- self._use_explicit_padding = use_explicit_padding
- self._use_sync_bn = use_sync_bn
- self._activation = activation
- self._stochastic_depth_drop_rate = stochastic_depth_drop_rate
- self._kernel_initializer = kernel_initializer
- self._norm_momentum = norm_momentum
- self._norm_epsilon = norm_epsilon
- self._kernel_regularizer = kernel_regularizer
- self._bias_regularizer = bias_regularizer
-
- if use_sync_bn:
- self._norm = tf.keras.layers.experimental.SyncBatchNormalization
- else:
- self._norm = tf.keras.layers.BatchNormalization
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._bn_axis = -1
- else:
- self._bn_axis = 1
- self._activation_fn = tf_utils.get_activation(activation)
- self._bn_trainable = bn_trainable
-
- def build(self, input_shape):
- if self._use_projection:
- self._shortcut = tf.keras.layers.Conv2D(
- filters=self._filters,
- kernel_size=1,
- strides=self._strides,
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- self._norm0 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon,
- trainable=self._bn_trainable)
-
- conv1_padding = 'same'
- # explicit padding here is added for centernet
- if self._use_explicit_padding:
- self._pad = tf.keras.layers.ZeroPadding2D(padding=(1, 1))
- conv1_padding = 'valid'
-
- self._conv1 = tf.keras.layers.Conv2D(
- filters=self._filters,
- kernel_size=3,
- strides=self._strides,
- padding=conv1_padding,
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- self._norm1 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon,
- trainable=self._bn_trainable)
-
- self._conv2 = tf.keras.layers.Conv2D(
- filters=self._filters,
- kernel_size=3,
- strides=1,
- padding='same',
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- self._norm2 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon,
- trainable=self._bn_trainable)
-
- if self._se_ratio and self._se_ratio > 0 and self._se_ratio <= 1:
- self._squeeze_excitation = nn_layers.SqueezeExcitation(
- in_filters=self._filters,
- out_filters=self._filters,
- se_ratio=self._se_ratio,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- else:
- self._squeeze_excitation = None
-
- if self._stochastic_depth_drop_rate:
- self._stochastic_depth = nn_layers.StochasticDepth(
- self._stochastic_depth_drop_rate)
- else:
- self._stochastic_depth = None
-
- super(ResidualBlock, self).build(input_shape)
-
- def get_config(self):
- config = {
- 'filters': self._filters,
- 'strides': self._strides,
- 'use_projection': self._use_projection,
- 'se_ratio': self._se_ratio,
- 'resnetd_shortcut': self._resnetd_shortcut,
- 'stochastic_depth_drop_rate': self._stochastic_depth_drop_rate,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- 'bias_regularizer': self._bias_regularizer,
- 'activation': self._activation,
- 'use_explicit_padding': self._use_explicit_padding,
- 'use_sync_bn': self._use_sync_bn,
- 'norm_momentum': self._norm_momentum,
- 'norm_epsilon': self._norm_epsilon,
- 'bn_trainable': self._bn_trainable
- }
- base_config = super(ResidualBlock, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
- def call(self, inputs, training=None):
- shortcut = inputs
- if self._use_projection:
- shortcut = self._shortcut(shortcut)
- shortcut = self._norm0(shortcut)
-
- if self._use_explicit_padding:
- inputs = self._pad(inputs)
- x = self._conv1(inputs)
- x = self._norm1(x)
- x = self._activation_fn(x)
-
- x = self._conv2(x)
- x = self._norm2(x)
-
- if self._squeeze_excitation:
- x = self._squeeze_excitation(x)
-
- if self._stochastic_depth:
- x = self._stochastic_depth(x, training=training)
-
- return self._activation_fn(x + shortcut)
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class BottleneckBlock(tf.keras.layers.Layer):
- """A standard bottleneck block."""
-
- def __init__(self,
- filters,
- strides,
- dilation_rate=1,
- use_projection=False,
- se_ratio=None,
- resnetd_shortcut=False,
- stochastic_depth_drop_rate=None,
- kernel_initializer='VarianceScaling',
- kernel_regularizer=None,
- bias_regularizer=None,
- activation='relu',
- use_sync_bn=False,
- norm_momentum=0.99,
- norm_epsilon=0.001,
- bn_trainable=True,
- **kwargs):
- """Initializes a standard bottleneck block with BN after convolutions.
-
- Args:
- filters: An `int` number of filters for the first two convolutions. Note
- that the third and final convolution will use 4 times as many filters.
- strides: An `int` block stride. If greater than 1, this block will
- ultimately downsample the input.
- dilation_rate: An `int` dilation_rate of convolutions. Default to 1.
- use_projection: A `bool` for whether this block should use a projection
- shortcut (versus the default identity shortcut). This is usually `True`
- for the first block of a block group, which may change the number of
- filters and the resolution.
- se_ratio: A `float` or None. Ratio of the Squeeze-and-Excitation layer.
- resnetd_shortcut: A `bool`. If True, apply the resnetd style modification
- to the shortcut connection.
- stochastic_depth_drop_rate: A `float` or None. If not None, drop rate for
- the stochastic depth layer.
- kernel_initializer: A `str` of kernel_initializer for convolutional
- layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default to None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2d.
- Default to None.
- activation: A `str` name of the activation function.
- use_sync_bn: A `bool`. If True, use synchronized batch normalization.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- bn_trainable: A `bool` that indicates whether batch norm layers should be
- trainable. Default to True.
- **kwargs: Additional keyword arguments to be passed.
- """
- super(BottleneckBlock, self).__init__(**kwargs)
-
- self._filters = filters
- self._strides = strides
- self._dilation_rate = dilation_rate
- self._use_projection = use_projection
- self._se_ratio = se_ratio
- self._resnetd_shortcut = resnetd_shortcut
- self._use_sync_bn = use_sync_bn
- self._activation = activation
- self._stochastic_depth_drop_rate = stochastic_depth_drop_rate
- self._kernel_initializer = kernel_initializer
- self._norm_momentum = norm_momentum
- self._norm_epsilon = norm_epsilon
- self._kernel_regularizer = kernel_regularizer
- self._bias_regularizer = bias_regularizer
- if use_sync_bn:
- self._norm = tf.keras.layers.experimental.SyncBatchNormalization
- else:
- self._norm = tf.keras.layers.BatchNormalization
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._bn_axis = -1
- else:
- self._bn_axis = 1
- self._bn_trainable = bn_trainable
-
- def build(self, input_shape):
- if self._use_projection:
- if self._resnetd_shortcut:
- self._shortcut0 = tf.keras.layers.AveragePooling2D(
- pool_size=2, strides=self._strides, padding='same')
- self._shortcut1 = tf.keras.layers.Conv2D(
- filters=self._filters * 4,
- kernel_size=1,
- strides=1,
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- else:
- self._shortcut = tf.keras.layers.Conv2D(
- filters=self._filters * 4,
- kernel_size=1,
- strides=self._strides,
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
-
- self._norm0 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon,
- trainable=self._bn_trainable)
-
- self._conv1 = tf.keras.layers.Conv2D(
- filters=self._filters,
- kernel_size=1,
- strides=1,
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- self._norm1 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon,
- trainable=self._bn_trainable)
- self._activation1 = tf_utils.get_activation(
- self._activation, use_keras_layer=True)
-
- self._conv2 = tf.keras.layers.Conv2D(
- filters=self._filters,
- kernel_size=3,
- strides=self._strides,
- dilation_rate=self._dilation_rate,
- padding='same',
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- self._norm2 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon,
- trainable=self._bn_trainable)
- self._activation2 = tf_utils.get_activation(
- self._activation, use_keras_layer=True)
-
- self._conv3 = tf.keras.layers.Conv2D(
- filters=self._filters * 4,
- kernel_size=1,
- strides=1,
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- self._norm3 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon,
- trainable=self._bn_trainable)
- self._activation3 = tf_utils.get_activation(
- self._activation, use_keras_layer=True)
-
- if self._se_ratio and self._se_ratio > 0 and self._se_ratio <= 1:
- self._squeeze_excitation = nn_layers.SqueezeExcitation(
- in_filters=self._filters * 4,
- out_filters=self._filters * 4,
- se_ratio=self._se_ratio,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- else:
- self._squeeze_excitation = None
-
- if self._stochastic_depth_drop_rate:
- self._stochastic_depth = nn_layers.StochasticDepth(
- self._stochastic_depth_drop_rate)
- else:
- self._stochastic_depth = None
- self._add = tf.keras.layers.Add()
-
- super(BottleneckBlock, self).build(input_shape)
-
- def get_config(self):
- config = {
- 'filters': self._filters,
- 'strides': self._strides,
- 'dilation_rate': self._dilation_rate,
- 'use_projection': self._use_projection,
- 'se_ratio': self._se_ratio,
- 'resnetd_shortcut': self._resnetd_shortcut,
- 'stochastic_depth_drop_rate': self._stochastic_depth_drop_rate,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- 'bias_regularizer': self._bias_regularizer,
- 'activation': self._activation,
- 'use_sync_bn': self._use_sync_bn,
- 'norm_momentum': self._norm_momentum,
- 'norm_epsilon': self._norm_epsilon,
- 'bn_trainable': self._bn_trainable
- }
- base_config = super(BottleneckBlock, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
- def call(self, inputs, training=None):
- shortcut = inputs
- if self._use_projection:
- if self._resnetd_shortcut:
- shortcut = self._shortcut0(shortcut)
- shortcut = self._shortcut1(shortcut)
- else:
- shortcut = self._shortcut(shortcut)
- shortcut = self._norm0(shortcut)
-
- x = self._conv1(inputs)
- x = self._norm1(x)
- x = self._activation1(x)
-
- x = self._conv2(x)
- x = self._norm2(x)
- x = self._activation2(x)
-
- x = self._conv3(x)
- x = self._norm3(x)
-
- if self._squeeze_excitation:
- x = self._squeeze_excitation(x)
-
- if self._stochastic_depth:
- x = self._stochastic_depth(x, training=training)
-
- x = self._add([x, shortcut])
- return self._activation3(x)
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class InvertedBottleneckBlock(tf.keras.layers.Layer):
- """An inverted bottleneck block."""
-
- def __init__(self,
- in_filters,
- out_filters,
- expand_ratio,
- strides,
- kernel_size=3,
- se_ratio=None,
- stochastic_depth_drop_rate=None,
- kernel_initializer='VarianceScaling',
- kernel_regularizer=None,
- bias_regularizer=None,
- activation='relu',
- se_inner_activation='relu',
- se_gating_activation='sigmoid',
- se_round_down_protect=True,
- expand_se_in_filters=False,
- depthwise_activation=None,
- use_sync_bn=False,
- dilation_rate=1,
- divisible_by=1,
- regularize_depthwise=False,
- use_depthwise=True,
- use_residual=True,
- norm_momentum=0.99,
- norm_epsilon=0.001,
- output_intermediate_endpoints=False,
- **kwargs):
- """Initializes an inverted bottleneck block with BN after convolutions.
-
- Args:
- in_filters: An `int` number of filters of the input tensor.
- out_filters: An `int` number of filters of the output tensor.
- expand_ratio: An `int` of expand_ratio for an inverted bottleneck block.
- strides: An `int` block stride. If greater than 1, this block will
- ultimately downsample the input.
- kernel_size: An `int` kernel_size of the depthwise conv layer.
- se_ratio: A `float` or None. If not None, se ratio for the squeeze and
- excitation layer.
- stochastic_depth_drop_rate: A `float` or None. if not None, drop rate for
- the stochastic depth layer.
- kernel_initializer: A `str` of kernel_initializer for convolutional
- layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default to None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2d.
- Default to None.
- activation: A `str` name of the activation function.
- se_inner_activation: A `str` name of squeeze-excitation inner activation.
- se_gating_activation: A `str` name of squeeze-excitation gating
- activation.
- se_round_down_protect: A `bool` of whether round down more than 10%
- will be allowed in SE layer.
- expand_se_in_filters: A `bool` of whether or not to expand in_filter in
- squeeze and excitation layer.
- depthwise_activation: A `str` name of the activation function for
- depthwise only.
- use_sync_bn: A `bool`. If True, use synchronized batch normalization.
- dilation_rate: An `int` that specifies the dilation rate to use for.
- divisible_by: An `int` that ensures all inner dimensions are divisible by
- this number.
- dilated convolution: An `int` to specify the same value for all spatial
- dimensions.
- regularize_depthwise: A `bool` of whether or not apply regularization on
- depthwise.
- use_depthwise: A `bool` of whether to uses fused convolutions instead of
- depthwise.
- use_residual: A `bool` of whether to include residual connection between
- input and output.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- output_intermediate_endpoints: A `bool` of whether or not output the
- intermediate endpoints.
- **kwargs: Additional keyword arguments to be passed.
- """
- super(InvertedBottleneckBlock, self).__init__(**kwargs)
-
- self._in_filters = in_filters
- self._out_filters = out_filters
- self._expand_ratio = expand_ratio
- self._strides = strides
- self._kernel_size = kernel_size
- self._se_ratio = se_ratio
- self._divisible_by = divisible_by
- self._stochastic_depth_drop_rate = stochastic_depth_drop_rate
- self._dilation_rate = dilation_rate
- self._use_sync_bn = use_sync_bn
- self._regularize_depthwise = regularize_depthwise
- self._use_depthwise = use_depthwise
- self._use_residual = use_residual
- self._activation = activation
- self._se_inner_activation = se_inner_activation
- self._se_gating_activation = se_gating_activation
- self._depthwise_activation = depthwise_activation
- self._se_round_down_protect = se_round_down_protect
- self._kernel_initializer = kernel_initializer
- self._norm_momentum = norm_momentum
- self._norm_epsilon = norm_epsilon
- self._kernel_regularizer = kernel_regularizer
- self._bias_regularizer = bias_regularizer
- self._expand_se_in_filters = expand_se_in_filters
- self._output_intermediate_endpoints = output_intermediate_endpoints
-
- if use_sync_bn:
- self._norm = tf.keras.layers.experimental.SyncBatchNormalization
- else:
- self._norm = tf.keras.layers.BatchNormalization
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._bn_axis = -1
- else:
- self._bn_axis = 1
- if not depthwise_activation:
- self._depthwise_activation = activation
- if regularize_depthwise:
- self._depthsize_regularizer = kernel_regularizer
- else:
- self._depthsize_regularizer = None
-
- def build(self, input_shape):
- expand_filters = self._in_filters
- if self._expand_ratio > 1:
- # First 1x1 conv for channel expansion.
- expand_filters = nn_layers.make_divisible(
- self._in_filters * self._expand_ratio, self._divisible_by)
-
- expand_kernel = 1 if self._use_depthwise else self._kernel_size
- expand_stride = 1 if self._use_depthwise else self._strides
-
- self._conv0 = tf.keras.layers.Conv2D(
- filters=expand_filters,
- kernel_size=expand_kernel,
- strides=expand_stride,
- padding='same',
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- self._norm0 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)
- self._activation_layer = tf_utils.get_activation(
- self._activation, use_keras_layer=True)
-
- if self._use_depthwise:
- # Depthwise conv.
- self._conv1 = tf.keras.layers.DepthwiseConv2D(
- kernel_size=(self._kernel_size, self._kernel_size),
- strides=self._strides,
- padding='same',
- depth_multiplier=1,
- dilation_rate=self._dilation_rate,
- use_bias=False,
- depthwise_initializer=self._kernel_initializer,
- depthwise_regularizer=self._depthsize_regularizer,
- bias_regularizer=self._bias_regularizer)
- self._norm1 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)
- self._depthwise_activation_layer = tf_utils.get_activation(
- self._depthwise_activation, use_keras_layer=True)
-
- # Squeeze and excitation.
- if self._se_ratio and self._se_ratio > 0 and self._se_ratio <= 1:
- logging.info('Use Squeeze and excitation.')
- in_filters = self._in_filters
- if self._expand_se_in_filters:
- in_filters = expand_filters
- self._squeeze_excitation = nn_layers.SqueezeExcitation(
- in_filters=in_filters,
- out_filters=expand_filters,
- se_ratio=self._se_ratio,
- divisible_by=self._divisible_by,
- round_down_protect=self._se_round_down_protect,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer,
- activation=self._se_inner_activation,
- gating_activation=self._se_gating_activation)
- else:
- self._squeeze_excitation = None
-
- # Last 1x1 conv.
- self._conv2 = tf.keras.layers.Conv2D(
- filters=self._out_filters,
- kernel_size=1,
- strides=1,
- padding='same',
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- self._norm2 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)
-
- if self._stochastic_depth_drop_rate:
- self._stochastic_depth = nn_layers.StochasticDepth(
- self._stochastic_depth_drop_rate)
- else:
- self._stochastic_depth = None
- self._add = tf.keras.layers.Add()
-
- super(InvertedBottleneckBlock, self).build(input_shape)
-
- def get_config(self):
- config = {
- 'in_filters': self._in_filters,
- 'out_filters': self._out_filters,
- 'expand_ratio': self._expand_ratio,
- 'strides': self._strides,
- 'kernel_size': self._kernel_size,
- 'se_ratio': self._se_ratio,
- 'divisible_by': self._divisible_by,
- 'stochastic_depth_drop_rate': self._stochastic_depth_drop_rate,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- 'bias_regularizer': self._bias_regularizer,
- 'activation': self._activation,
- 'se_inner_activation': self._se_inner_activation,
- 'se_gating_activation': self._se_gating_activation,
- 'se_round_down_protect': self._se_round_down_protect,
- 'expand_se_in_filters': self._expand_se_in_filters,
- 'depthwise_activation': self._depthwise_activation,
- 'dilation_rate': self._dilation_rate,
- 'use_sync_bn': self._use_sync_bn,
- 'regularize_depthwise': self._regularize_depthwise,
- 'use_depthwise': self._use_depthwise,
- 'use_residual': self._use_residual,
- 'norm_momentum': self._norm_momentum,
- 'norm_epsilon': self._norm_epsilon,
- 'output_intermediate_endpoints': self._output_intermediate_endpoints
- }
- base_config = super(InvertedBottleneckBlock, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
- def call(self, inputs, training=None):
- endpoints = {}
- shortcut = inputs
- if self._expand_ratio > 1:
- x = self._conv0(inputs)
- x = self._norm0(x)
- x = self._activation_layer(x)
- else:
- x = inputs
-
- if self._use_depthwise:
- x = self._conv1(x)
- x = self._norm1(x)
- x = self._depthwise_activation_layer(x)
- if self._output_intermediate_endpoints:
- endpoints['depthwise'] = x
-
- if self._squeeze_excitation:
- x = self._squeeze_excitation(x)
-
- x = self._conv2(x)
- x = self._norm2(x)
-
- if (self._use_residual and self._in_filters == self._out_filters and
- self._strides == 1):
- if self._stochastic_depth:
- x = self._stochastic_depth(x, training=training)
- x = self._add([x, shortcut])
-
- if self._output_intermediate_endpoints:
- return x, endpoints
- return x
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class ResidualInner(tf.keras.layers.Layer):
- """Creates a single inner block of a residual.
-
- This corresponds to `F`/`G` functions in the RevNet paper:
- Aidan N. Gomez, Mengye Ren, Raquel Urtasun, Roger B. Grosse.
- The Reversible Residual Network: Backpropagation Without Storing Activations.
- (https://arxiv.org/pdf/1707.04585.pdf)
- """
-
- def __init__(
- self,
- filters: int,
- strides: int,
- kernel_initializer: Union[str, Callable[
- ..., tf.keras.initializers.Initializer]] = 'VarianceScaling',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- activation: Union[str, Callable[..., tf.Tensor]] = 'relu',
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- batch_norm_first: bool = True,
- **kwargs):
- """Initializes a ResidualInner.
-
- Args:
- filters: An `int` of output filter size.
- strides: An `int` of stride size for convolution for the residual block.
- kernel_initializer: A `str` or `tf.keras.initializers.Initializer`
- instance for convolutional layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` for Conv2D.
- activation: A `str` or `callable` instance of the activation function.
- use_sync_bn: A `bool`. If True, use synchronized batch normalization.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- batch_norm_first: A `bool` of whether to apply activation and batch norm
- before conv.
- **kwargs: Additional keyword arguments to be passed.
- """
- super(ResidualInner, self).__init__(**kwargs)
-
- self.strides = strides
- self.filters = filters
- self._kernel_initializer = tf.keras.initializers.get(kernel_initializer)
- self._kernel_regularizer = kernel_regularizer
- self._activation = tf.keras.activations.get(activation)
- self._use_sync_bn = use_sync_bn
- self._norm_momentum = norm_momentum
- self._norm_epsilon = norm_epsilon
- self._batch_norm_first = batch_norm_first
-
- if use_sync_bn:
- self._norm = tf.keras.layers.experimental.SyncBatchNormalization
- else:
- self._norm = tf.keras.layers.BatchNormalization
-
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._bn_axis = -1
- else:
- self._bn_axis = 1
- self._activation_fn = tf_utils.get_activation(activation)
-
- def build(self, input_shape: tf.TensorShape):
- if self._batch_norm_first:
- self._batch_norm_0 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)
-
- self._conv2d_1 = tf.keras.layers.Conv2D(
- filters=self.filters,
- kernel_size=3,
- strides=self.strides,
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer)
-
- self._batch_norm_1 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)
-
- self._conv2d_2 = tf.keras.layers.Conv2D(
- filters=self.filters,
- kernel_size=3,
- strides=1,
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer)
-
- super(ResidualInner, self).build(input_shape)
-
- def get_config(self) -> Dict[str, Any]:
- config = {
- 'filters': self.filters,
- 'strides': self.strides,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- 'activation': self._activation,
- 'use_sync_bn': self._use_sync_bn,
- 'norm_momentum': self._norm_momentum,
- 'norm_epsilon': self._norm_epsilon,
- 'batch_norm_first': self._batch_norm_first,
- }
- base_config = super(ResidualInner, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
- def call(self,
- inputs: tf.Tensor,
- training: Optional[bool] = None) -> tf.Tensor:
- x = inputs
- if self._batch_norm_first:
- x = self._batch_norm_0(x, training=training)
- x = self._activation_fn(x)
- x = self._conv2d_1(x)
-
- x = self._batch_norm_1(x, training=training)
- x = self._activation_fn(x)
- x = self._conv2d_2(x)
- return x
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class BottleneckResidualInner(tf.keras.layers.Layer):
- """Creates a single inner block of a bottleneck.
-
- This corresponds to `F`/`G` functions in the RevNet paper:
- Aidan N. Gomez, Mengye Ren, Raquel Urtasun, Roger B. Grosse.
- The Reversible Residual Network: Backpropagation Without Storing Activations.
- (https://arxiv.org/pdf/1707.04585.pdf)
- """
-
- def __init__(
- self,
- filters: int,
- strides: int,
- kernel_initializer: Union[str, Callable[
- ..., tf.keras.initializers.Initializer]] = 'VarianceScaling',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- activation: Union[str, Callable[..., tf.Tensor]] = 'relu',
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- batch_norm_first: bool = True,
- **kwargs):
- """Initializes a BottleneckResidualInner.
-
- Args:
- filters: An `int` number of filters for first 2 convolutions. Last Last,
- and thus the number of output channels from the bottlneck block is
- `4*filters`
- strides: An `int` of stride size for convolution for the residual block.
- kernel_initializer: A `str` or `tf.keras.initializers.Initializer`
- instance for convolutional layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` for Conv2D.
- activation: A `str` or `callable` instance of the activation function.
- use_sync_bn: A `bool`. If True, use synchronized batch normalization.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- batch_norm_first: A `bool` of whether to apply activation and batch norm
- before conv.
- **kwargs: Additional keyword arguments to be passed.
- """
- super(BottleneckResidualInner, self).__init__(**kwargs)
-
- self.strides = strides
- self.filters = filters
- self._kernel_initializer = tf.keras.initializers.get(kernel_initializer)
- self._kernel_regularizer = kernel_regularizer
- self._activation = tf.keras.activations.get(activation)
- self._use_sync_bn = use_sync_bn
- self._norm_momentum = norm_momentum
- self._norm_epsilon = norm_epsilon
- self._batch_norm_first = batch_norm_first
-
- if use_sync_bn:
- self._norm = tf.keras.layers.experimental.SyncBatchNormalization
- else:
- self._norm = tf.keras.layers.BatchNormalization
-
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._bn_axis = -1
- else:
- self._bn_axis = 1
- self._activation_fn = tf_utils.get_activation(activation)
-
- def build(self, input_shape: tf.TensorShape):
- if self._batch_norm_first:
- self._batch_norm_0 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)
- self._conv2d_1 = tf.keras.layers.Conv2D(
- filters=self.filters,
- kernel_size=1,
- strides=self.strides,
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer)
- self._batch_norm_1 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)
- self._conv2d_2 = tf.keras.layers.Conv2D(
- filters=self.filters,
- kernel_size=3,
- strides=1,
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer)
- self._batch_norm_2 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)
- self._conv2d_3 = tf.keras.layers.Conv2D(
- filters=self.filters * 4,
- kernel_size=1,
- strides=1,
- use_bias=False,
- padding='same',
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer)
-
- super(BottleneckResidualInner, self).build(input_shape)
-
- def get_config(self) -> Dict[str, Any]:
- config = {
- 'filters': self.filters,
- 'strides': self.strides,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- 'activation': self._activation,
- 'use_sync_bn': self._use_sync_bn,
- 'norm_momentum': self._norm_momentum,
- 'norm_epsilon': self._norm_epsilon,
- 'batch_norm_first': self._batch_norm_first,
- }
- base_config = super(BottleneckResidualInner, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
- def call(self,
- inputs: tf.Tensor,
- training: Optional[bool] = None) -> tf.Tensor:
- x = inputs
- if self._batch_norm_first:
- x = self._batch_norm_0(x, training=training)
- x = self._activation_fn(x)
- x = self._conv2d_1(x)
-
- x = self._batch_norm_1(x, training=training)
- x = self._activation_fn(x)
- x = self._conv2d_2(x)
-
- x = self._batch_norm_2(x, training=training)
- x = self._activation_fn(x)
- x = self._conv2d_3(x)
-
- return x
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class ReversibleLayer(tf.keras.layers.Layer):
- """Creates a reversible layer.
-
- Computes y1 = x1 + f(x2), y2 = x2 + g(y1), where f and g can be arbitrary
- layers that are stateless, which in this case are `ResidualInner` layers.
- """
-
- def __init__(self,
- f: tf.keras.layers.Layer,
- g: tf.keras.layers.Layer,
- manual_grads: bool = True,
- **kwargs):
- """Initializes a ReversibleLayer.
-
- Args:
- f: A `tf.keras.layers.Layer` instance of `f` inner block referred to in
- paper. Each reversible layer consists of two inner functions. For
- example, in RevNet the reversible residual consists of two f/g inner
- (bottleneck) residual functions. Where the input to the reversible layer
- is x, the input gets partitioned in the channel dimension and the
- forward pass follows (eq8): x = [x1; x2], z1 = x1 + f(x2), y2 = x2 +
- g(z1), y1 = stop_gradient(z1).
- g: A `tf.keras.layers.Layer` instance of `g` inner block referred to in
- paper. Detailed explanation same as above as `f` arg.
- manual_grads: A `bool` [Testing Only] of whether to manually take
- gradients as in Algorithm 1 or defer to autograd.
- **kwargs: Additional keyword arguments to be passed.
- """
- super(ReversibleLayer, self).__init__(**kwargs)
-
- self._f = f
- self._g = g
- self._manual_grads = manual_grads
-
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._axis = -1
- else:
- self._axis = 1
-
- def get_config(self) -> Dict[str, Any]:
- config = {
- 'f': self._f,
- 'g': self._g,
- 'manual_grads': self._manual_grads,
- }
- base_config = super(ReversibleLayer, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
- def _ckpt_non_trainable_vars(self):
- self._f_non_trainable_vars = [
- v.read_value() for v in self._f.non_trainable_variables
- ]
- self._g_non_trainable_vars = [
- v.read_value() for v in self._g.non_trainable_variables
- ]
-
- def _load_ckpt_non_trainable_vars(self):
- for v, v_chkpt in zip(self._f.non_trainable_variables,
- self._f_non_trainable_vars):
- v.assign(v_chkpt)
- for v, v_chkpt in zip(self._g.non_trainable_variables,
- self._g_non_trainable_vars):
- v.assign(v_chkpt)
-
- def call(self,
- inputs: tf.Tensor,
- training: Optional[bool] = None) -> tf.Tensor:
-
- @tf.custom_gradient
- def reversible(
- x: tf.Tensor
- ) -> Tuple[tf.Tensor, Callable[[Any], Tuple[List[tf.Tensor],
- List[tf.Tensor]]]]:
- """Implements Algorithm 1 in the RevNet paper.
-
- Aidan N. Gomez, Mengye Ren, Raquel Urtasun, Roger B. Grosse.
- The Reversible Residual Network: Backpropagation Without Storing
- Activations.
- (https://arxiv.org/pdf/1707.04585.pdf)
-
- Args:
- x: An input `tf.Tensor.
-
- Returns:
- y: The output [y1; y2] in Algorithm 1.
- grad_fn: A callable function that computes the gradients.
- """
- with tf.GradientTape() as fwdtape:
- fwdtape.watch(x)
- x1, x2 = tf.split(x, num_or_size_splits=2, axis=self._axis)
- f_x2 = self._f(x2, training=training)
- x1_down = _maybe_downsample(x1, f_x2.shape[self._axis], self._f.strides,
- self._axis)
- z1 = f_x2 + x1_down
- g_z1 = self._g(z1, training=training)
- x2_down = _maybe_downsample(x2, g_z1.shape[self._axis], self._f.strides,
- self._axis)
- y2 = x2_down + g_z1
-
- # Equation 8: https://arxiv.org/pdf/1707.04585.pdf
- # Decouple y1 and z1 so that their derivatives are different.
- y1 = tf.identity(z1)
- y = tf.concat([y1, y2], axis=self._axis)
-
- irreversible = ((self._f.strides != 1 or self._g.strides != 1) or
- (y.shape[self._axis] != inputs.shape[self._axis]))
-
- # Checkpointing moving mean/variance for batch normalization layers
- # as they shouldn't be updated during the custom gradient pass of f/g.
- self._ckpt_non_trainable_vars()
-
- def grad_fn(
- dy: tf.Tensor,
- variables: Optional[List[tf.Variable]] = None,
- ) -> Tuple[List[tf.Tensor], List[tf.Tensor]]:
- """Given dy calculate (dy/dx)|_{x_{input}} using f/g."""
- if irreversible or not self._manual_grads:
- grads_combined = fwdtape.gradient(
- y, [x] + variables, output_gradients=dy)
- dx = grads_combined[0]
- grad_vars = grads_combined[1:]
- else:
- y1_nograd = tf.stop_gradient(y1)
- y2_nograd = tf.stop_gradient(y2)
- dy1, dy2 = tf.split(dy, num_or_size_splits=2, axis=self._axis)
-
- # Index mapping from self.f/g.trainable_variables to grad_fn
- # input `variables` kwarg so that we can reorder dwf + dwg
- # variable gradient list to match `variables` order.
- f_var_refs = [v.ref() for v in self._f.trainable_variables]
- g_var_refs = [v.ref() for v in self._g.trainable_variables]
- fg_var_refs = f_var_refs + g_var_refs
- self_to_var_index = [fg_var_refs.index(v.ref()) for v in variables]
-
- # Algorithm 1 in paper (line # documented in-line)
- z1 = y1_nograd # line 2
- with tf.GradientTape() as gtape:
- gtape.watch(z1)
- g_z1 = self._g(z1, training=training)
- x2 = y2_nograd - g_z1 # line 3
-
- with tf.GradientTape() as ftape:
- ftape.watch(x2)
- f_x2 = self._f(x2, training=training)
- x1 = z1 - f_x2 # pylint: disable=unused-variable # line 4
-
- # Compute gradients
- g_grads_combined = gtape.gradient(
- g_z1, [z1] + self._g.trainable_variables, output_gradients=dy2)
- dz1 = dy1 + g_grads_combined[0] # line 5
- dwg = g_grads_combined[1:] # line 9
-
- f_grads_combined = ftape.gradient(
- f_x2, [x2] + self._f.trainable_variables, output_gradients=dz1)
- dx2 = dy2 + f_grads_combined[0] # line 6
- dwf = f_grads_combined[1:] # line 8
- dx1 = dz1 # line 7
-
- # Pack the input and variable gradients.
- dx = tf.concat([dx1, dx2], axis=self._axis)
- grad_vars = dwf + dwg
- # Reorder gradients (trainable_variables to variables kwarg order)
- grad_vars = [grad_vars[i] for i in self_to_var_index]
-
- # Restore batch normalization moving mean/variance for correctness.
- self._load_ckpt_non_trainable_vars()
-
- return dx, grad_vars # grad_fn end
-
- return y, grad_fn # reversible end
-
- activations = reversible(inputs)
- return activations
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class DepthwiseSeparableConvBlock(tf.keras.layers.Layer):
- """Creates an depthwise separable convolution block with batch normalization."""
-
- def __init__(
- self,
- filters: int,
- kernel_size: int = 3,
- strides: int = 1,
- regularize_depthwise=False,
- activation: Text = 'relu6',
- kernel_initializer: Text = 'VarianceScaling',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- dilation_rate: int = 1,
- use_sync_bn: bool = False,
- norm_momentum: float = 0.99,
- norm_epsilon: float = 0.001,
- **kwargs):
- """Initializes a convolution block with batch normalization.
-
- Args:
- filters: An `int` number of filters for the first two convolutions. Note
- that the third and final convolution will use 4 times as many filters.
- kernel_size: An `int` that specifies the height and width of the 2D
- convolution window.
- strides: An `int` of block stride. If greater than 1, this block will
- ultimately downsample the input.
- regularize_depthwise: A `bool`. If Ture, apply regularization on
- depthwise.
- activation: A `str` name of the activation function.
- kernel_initializer: A `str` of kernel_initializer for convolutional
- layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default to None.
- dilation_rate: An `int` or tuple/list of 2 `int`, specifying the dilation
- rate to use for dilated convolution. Can be a single integer to specify
- the same value for all spatial dimensions.
- use_sync_bn: A `bool`. If True, use synchronized batch normalization.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- **kwargs: Additional keyword arguments to be passed.
- """
- super(DepthwiseSeparableConvBlock, self).__init__(**kwargs)
- self._filters = filters
- self._kernel_size = kernel_size
- self._strides = strides
- self._activation = activation
- self._regularize_depthwise = regularize_depthwise
- self._kernel_initializer = kernel_initializer
- self._kernel_regularizer = kernel_regularizer
- self._dilation_rate = dilation_rate
- self._use_sync_bn = use_sync_bn
- self._norm_momentum = norm_momentum
- self._norm_epsilon = norm_epsilon
-
- if use_sync_bn:
- self._norm = tf.keras.layers.experimental.SyncBatchNormalization
- else:
- self._norm = tf.keras.layers.BatchNormalization
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._bn_axis = -1
- else:
- self._bn_axis = 1
- self._activation_fn = tf_utils.get_activation(activation)
- if regularize_depthwise:
- self._depthsize_regularizer = kernel_regularizer
- else:
- self._depthsize_regularizer = None
-
- def get_config(self):
- config = {
- 'filters': self._filters,
- 'strides': self._strides,
- 'regularize_depthwise': self._regularize_depthwise,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- 'activation': self._activation,
- 'use_sync_bn': self._use_sync_bn,
- 'norm_momentum': self._norm_momentum,
- 'norm_epsilon': self._norm_epsilon
- }
- base_config = super(DepthwiseSeparableConvBlock, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
- def build(self, input_shape):
-
- self._dwconv0 = tf.keras.layers.DepthwiseConv2D(
- kernel_size=self._kernel_size,
- strides=self._strides,
- padding='same',
- depth_multiplier=1,
- dilation_rate=self._dilation_rate,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._depthsize_regularizer,
- use_bias=False)
- self._norm0 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)
-
- self._conv1 = tf.keras.layers.Conv2D(
- filters=self._filters,
- kernel_size=1,
- strides=1,
- padding='same',
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer)
- self._norm1 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)
-
- super(DepthwiseSeparableConvBlock, self).build(input_shape)
-
- def call(self, inputs, training=None):
- x = self._dwconv0(inputs)
- x = self._norm0(x)
- x = self._activation_fn(x)
-
- x = self._conv1(x)
- x = self._norm1(x)
- return self._activation_fn(x)
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class TuckerConvBlock(tf.keras.layers.Layer):
- """An Tucker block (generalized bottleneck)."""
-
- def __init__(self,
- in_filters,
- out_filters,
- input_compression_ratio,
- output_compression_ratio,
- strides,
- kernel_size=3,
- stochastic_depth_drop_rate=None,
- kernel_initializer='VarianceScaling',
- kernel_regularizer=None,
- bias_regularizer=None,
- activation='relu',
- use_sync_bn=False,
- divisible_by=1,
- use_residual=True,
- norm_momentum=0.99,
- norm_epsilon=0.001,
- **kwargs):
- """Initializes an inverted bottleneck block with BN after convolutions.
-
- Args:
- in_filters: An `int` number of filters of the input tensor.
- out_filters: An `int` number of filters of the output tensor.
- input_compression_ratio: An `float` of compression ratio for
- input filters.
- output_compression_ratio: An `float` of compression ratio for
- output filters.
- strides: An `int` block stride. If greater than 1, this block will
- ultimately downsample the input.
- kernel_size: An `int` kernel_size of the depthwise conv layer.
- stochastic_depth_drop_rate: A `float` or None. if not None, drop rate for
- the stochastic depth layer.
- kernel_initializer: A `str` of kernel_initializer for convolutional
- layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default to None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2d.
- Default to None.
- activation: A `str` name of the activation function.
- use_sync_bn: A `bool`. If True, use synchronized batch normalization.
- divisible_by: An `int` that ensures all inner dimensions are divisible by
- this number.
- use_residual: A `bool` of whether to include residual connection between
- input and output.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- **kwargs: Additional keyword arguments to be passed.
- """
- super(TuckerConvBlock, self).__init__(**kwargs)
-
- self._in_filters = in_filters
- self._out_filters = out_filters
- self._input_compression_ratio = input_compression_ratio
- self._output_compression_ratio = output_compression_ratio
- self._strides = strides
- self._kernel_size = kernel_size
- self._divisible_by = divisible_by
- self._stochastic_depth_drop_rate = stochastic_depth_drop_rate
- self._use_sync_bn = use_sync_bn
- self._use_residual = use_residual
- self._activation = activation
- self._kernel_initializer = kernel_initializer
- self._norm_momentum = norm_momentum
- self._norm_epsilon = norm_epsilon
- self._kernel_regularizer = kernel_regularizer
- self._bias_regularizer = bias_regularizer
-
- if use_sync_bn:
- self._norm = tf.keras.layers.experimental.SyncBatchNormalization
- else:
- self._norm = tf.keras.layers.BatchNormalization
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._bn_axis = -1
- else:
- self._bn_axis = 1
-
- def build(self, input_shape):
- input_compressed_filters = nn_layers.make_divisible(
- value=self._in_filters * self._input_compression_ratio,
- divisor=self._divisible_by,
- round_down_protect=False)
-
- self._conv0 = tf.keras.layers.Conv2D(
- filters=input_compressed_filters,
- kernel_size=1,
- strides=1,
- padding='same',
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- self._norm0 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)
- self._activation_layer0 = tf_utils.get_activation(
- self._activation, use_keras_layer=True)
-
- output_compressed_filters = nn_layers.make_divisible(
- value=self._out_filters * self._output_compression_ratio,
- divisor=self._divisible_by,
- round_down_protect=False)
-
- self._conv1 = tf.keras.layers.Conv2D(
- filters=output_compressed_filters,
- kernel_size=self._kernel_size,
- strides=self._strides,
- padding='same',
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- self._norm1 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)
- self._activation_layer1 = tf_utils.get_activation(
- self._activation, use_keras_layer=True)
-
- # Last 1x1 conv.
- self._conv2 = tf.keras.layers.Conv2D(
- filters=self._out_filters,
- kernel_size=1,
- strides=1,
- padding='same',
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- self._norm2 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)
-
- if self._stochastic_depth_drop_rate:
- self._stochastic_depth = nn_layers.StochasticDepth(
- self._stochastic_depth_drop_rate)
- else:
- self._stochastic_depth = None
- self._add = tf.keras.layers.Add()
-
- super(TuckerConvBlock, self).build(input_shape)
-
- def get_config(self):
- config = {
- 'in_filters': self._in_filters,
- 'out_filters': self._out_filters,
- 'input_compression_ratio': self._input_compression_ratio,
- 'output_compression_ratio': self._output_compression_ratio,
- 'strides': self._strides,
- 'kernel_size': self._kernel_size,
- 'divisible_by': self._divisible_by,
- 'stochastic_depth_drop_rate': self._stochastic_depth_drop_rate,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- 'bias_regularizer': self._bias_regularizer,
- 'activation': self._activation,
- 'use_sync_bn': self._use_sync_bn,
- 'use_residual': self._use_residual,
- 'norm_momentum': self._norm_momentum,
- 'norm_epsilon': self._norm_epsilon
- }
- base_config = super(TuckerConvBlock, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
- def call(self, inputs, training=None):
- shortcut = inputs
-
- x = self._conv0(inputs)
- x = self._norm0(x)
- x = self._activation_layer0(x)
-
- x = self._conv1(x)
- x = self._norm1(x)
- x = self._activation_layer1(x)
-
- x = self._conv2(x)
- x = self._norm2(x)
-
- if (self._use_residual and
- self._in_filters == self._out_filters and
- self._strides == 1):
- if self._stochastic_depth:
- x = self._stochastic_depth(x, training=training)
- x = self._add([x, shortcut])
-
- return x
diff --git a/official/vision/beta/modeling/layers/nn_blocks_3d.py b/official/vision/beta/modeling/layers/nn_blocks_3d.py
deleted file mode 100644
index 29a2cd274a4dfaf48b630155b3999b7a868356c7..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/layers/nn_blocks_3d.py
+++ /dev/null
@@ -1,286 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains common building blocks for 3D networks."""
-# Import libraries
-import tensorflow as tf
-
-from official.modeling import tf_utils
-from official.vision.beta.modeling.layers import nn_layers
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class SelfGating(tf.keras.layers.Layer):
- """Feature gating as used in S3D-G.
-
- This implements the S3D-G network from:
- Saining Xie, Chen Sun, Jonathan Huang, Zhuowen Tu, Kevin Murphy.
- Rethinking Spatiotemporal Feature Learning: Speed-Accuracy Trade-offs in Video
- Classification.
- (https://arxiv.org/pdf/1712.04851.pdf)
- """
-
- def __init__(self, filters, **kwargs):
- """Initializes a self-gating layer.
-
- Args:
- filters: An `int` number of filters for the convolutional layer.
- **kwargs: Additional keyword arguments to be passed.
- """
- super(SelfGating, self).__init__(**kwargs)
- self._filters = filters
-
- def build(self, input_shape):
- self._spatial_temporal_average = tf.keras.layers.GlobalAveragePooling3D()
-
- # No BN and activation after conv.
- self._transformer_w = tf.keras.layers.Conv3D(
- filters=self._filters,
- kernel_size=[1, 1, 1],
- use_bias=True,
- kernel_initializer=tf.keras.initializers.TruncatedNormal(
- mean=0.0, stddev=0.01))
-
- super(SelfGating, self).build(input_shape)
-
- def call(self, inputs):
- x = self._spatial_temporal_average(inputs)
-
- x = tf.expand_dims(x, 1)
- x = tf.expand_dims(x, 2)
- x = tf.expand_dims(x, 3)
-
- x = self._transformer_w(x)
- x = tf.nn.sigmoid(x)
-
- return tf.math.multiply(x, inputs)
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class BottleneckBlock3D(tf.keras.layers.Layer):
- """Creates a 3D bottleneck block."""
-
- def __init__(self,
- filters,
- temporal_kernel_size,
- temporal_strides,
- spatial_strides,
- stochastic_depth_drop_rate=0.0,
- se_ratio=None,
- use_self_gating=False,
- kernel_initializer='VarianceScaling',
- kernel_regularizer=None,
- bias_regularizer=None,
- activation='relu',
- use_sync_bn=False,
- norm_momentum=0.99,
- norm_epsilon=0.001,
- **kwargs):
- """Initializes a 3D bottleneck block with BN after convolutions.
-
- Args:
- filters: An `int` number of filters for the first two convolutions. Note
- that the third and final convolution will use 4 times as many filters.
- temporal_kernel_size: An `int` of kernel size for the temporal
- convolutional layer.
- temporal_strides: An `int` of ftemporal stride for the temporal
- convolutional layer.
- spatial_strides: An `int` of spatial stride for the spatial convolutional
- layer.
- stochastic_depth_drop_rate: A `float` or None. If not None, drop rate for
- the stochastic depth layer.
- se_ratio: A `float` or None. Ratio of the Squeeze-and-Excitation layer.
- use_self_gating: A `bool` of whether to apply self-gating module or not.
- kernel_initializer: A `str` of kernel_initializer for convolutional
- layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default to None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2d.
- Default to None.
- activation: A `str` name of the activation function.
- use_sync_bn: A `bool`. If True, use synchronized batch normalization.
- norm_momentum: A `float` of normalization momentum for the moving average.
- norm_epsilon: A `float` added to variance to avoid dividing by zero.
- **kwargs: Additional keyword arguments to be passed.
- """
- super(BottleneckBlock3D, self).__init__(**kwargs)
-
- self._filters = filters
- self._temporal_kernel_size = temporal_kernel_size
- self._spatial_strides = spatial_strides
- self._temporal_strides = temporal_strides
- self._stochastic_depth_drop_rate = stochastic_depth_drop_rate
- self._use_self_gating = use_self_gating
- self._se_ratio = se_ratio
- self._use_sync_bn = use_sync_bn
- self._activation = activation
- self._kernel_initializer = kernel_initializer
- self._norm_momentum = norm_momentum
- self._norm_epsilon = norm_epsilon
- self._kernel_regularizer = kernel_regularizer
- self._bias_regularizer = bias_regularizer
-
- if use_sync_bn:
- self._norm = tf.keras.layers.experimental.SyncBatchNormalization
- else:
- self._norm = tf.keras.layers.BatchNormalization
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._bn_axis = -1
- else:
- self._bn_axis = 1
- self._activation_fn = tf_utils.get_activation(activation)
-
- def build(self, input_shape):
- self._shortcut_maxpool = tf.keras.layers.MaxPool3D(
- pool_size=[1, 1, 1],
- strides=[
- self._temporal_strides, self._spatial_strides, self._spatial_strides
- ])
-
- self._shortcut_conv = tf.keras.layers.Conv3D(
- filters=4 * self._filters,
- kernel_size=1,
- strides=[
- self._temporal_strides, self._spatial_strides, self._spatial_strides
- ],
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- self._norm0 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)
-
- self._temporal_conv = tf.keras.layers.Conv3D(
- filters=self._filters,
- kernel_size=[self._temporal_kernel_size, 1, 1],
- strides=[self._temporal_strides, 1, 1],
- padding='same',
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- self._norm1 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)
-
- self._spatial_conv = tf.keras.layers.Conv3D(
- filters=self._filters,
- kernel_size=[1, 3, 3],
- strides=[1, self._spatial_strides, self._spatial_strides],
- padding='same',
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- self._norm2 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)
-
- self._expand_conv = tf.keras.layers.Conv3D(
- filters=4 * self._filters,
- kernel_size=[1, 1, 1],
- strides=[1, 1, 1],
- padding='same',
- use_bias=False,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- self._norm3 = self._norm(
- axis=self._bn_axis,
- momentum=self._norm_momentum,
- epsilon=self._norm_epsilon)
-
- if self._se_ratio and self._se_ratio > 0 and self._se_ratio <= 1:
- self._squeeze_excitation = nn_layers.SqueezeExcitation(
- in_filters=self._filters * 4,
- out_filters=self._filters * 4,
- se_ratio=self._se_ratio,
- use_3d_input=True,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
- else:
- self._squeeze_excitation = None
-
- if self._stochastic_depth_drop_rate:
- self._stochastic_depth = nn_layers.StochasticDepth(
- self._stochastic_depth_drop_rate)
- else:
- self._stochastic_depth = None
-
- if self._use_self_gating:
- self._self_gating = SelfGating(filters=4 * self._filters)
- else:
- self._self_gating = None
-
- super(BottleneckBlock3D, self).build(input_shape)
-
- def get_config(self):
- config = {
- 'filters': self._filters,
- 'temporal_kernel_size': self._temporal_kernel_size,
- 'temporal_strides': self._temporal_strides,
- 'spatial_strides': self._spatial_strides,
- 'use_self_gating': self._use_self_gating,
- 'se_ratio': self._se_ratio,
- 'stochastic_depth_drop_rate': self._stochastic_depth_drop_rate,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- 'bias_regularizer': self._bias_regularizer,
- 'activation': self._activation,
- 'use_sync_bn': self._use_sync_bn,
- 'norm_momentum': self._norm_momentum,
- 'norm_epsilon': self._norm_epsilon
- }
- base_config = super(BottleneckBlock3D, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
- def call(self, inputs, training=None):
- in_filters = inputs.shape.as_list()[-1]
- if in_filters == 4 * self._filters:
- if self._temporal_strides == 1 and self._spatial_strides == 1:
- shortcut = inputs
- else:
- shortcut = self._shortcut_maxpool(inputs)
- else:
- shortcut = self._shortcut_conv(inputs)
- shortcut = self._norm0(shortcut)
-
- x = self._temporal_conv(inputs)
- x = self._norm1(x)
- x = self._activation_fn(x)
-
- x = self._spatial_conv(x)
- x = self._norm2(x)
- x = self._activation_fn(x)
-
- x = self._expand_conv(x)
- x = self._norm3(x)
-
- # Apply self-gating, SE, stochastic depth.
- if self._self_gating:
- x = self._self_gating(x)
- if self._squeeze_excitation:
- x = self._squeeze_excitation(x)
- if self._stochastic_depth:
- x = self._stochastic_depth(x, training=training)
-
- # Apply activation before additional modules.
- x = self._activation_fn(x + shortcut)
-
- return x
diff --git a/official/vision/beta/modeling/layers/nn_blocks_3d_test.py b/official/vision/beta/modeling/layers/nn_blocks_3d_test.py
deleted file mode 100644
index 143beb7121a09196566d2353d256fb6cb2be2f64..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/layers/nn_blocks_3d_test.py
+++ /dev/null
@@ -1,59 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for resnet."""
-
-# Import libraries
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.vision.beta.modeling.layers import nn_blocks_3d
-
-
-class NNBlocksTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (nn_blocks_3d.BottleneckBlock3D, 1, 1, 2, True, 0.2, 0.1),
- (nn_blocks_3d.BottleneckBlock3D, 3, 2, 1, False, 0.0, 0.0),
- )
- def test_bottleneck_block_creation(self, block_fn, temporal_kernel_size,
- temporal_strides, spatial_strides,
- use_self_gating, se_ratio,
- stochastic_depth):
- temporal_size = 16
- spatial_size = 128
- filters = 256
- inputs = tf.keras.Input(
- shape=(temporal_size, spatial_size, spatial_size, filters * 4),
- batch_size=1)
- block = block_fn(
- filters=filters,
- temporal_kernel_size=temporal_kernel_size,
- temporal_strides=temporal_strides,
- spatial_strides=spatial_strides,
- use_self_gating=use_self_gating,
- se_ratio=se_ratio,
- stochastic_depth_drop_rate=stochastic_depth)
-
- features = block(inputs)
-
- self.assertAllEqual([
- 1, temporal_size // temporal_strides, spatial_size // spatial_strides,
- spatial_size // spatial_strides, filters * 4
- ], features.shape.as_list())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/layers/nn_blocks_test.py b/official/vision/beta/modeling/layers/nn_blocks_test.py
deleted file mode 100644
index e1ad22ad0c0905b56c62534a0a1df04d9ee74c5c..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/layers/nn_blocks_test.py
+++ /dev/null
@@ -1,341 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for nn_blocks."""
-
-from typing import Any, Iterable, Tuple
-# Import libraries
-from absl.testing import parameterized
-import tensorflow as tf
-
-from tensorflow.python.distribute import combinations
-from tensorflow.python.distribute import strategy_combinations
-from official.vision.beta.modeling.layers import nn_blocks
-
-
-def distribution_strategy_combinations() -> Iterable[Tuple[Any, ...]]:
- """Returns the combinations of end-to-end tests to run."""
- return combinations.combine(
- distribution=[
- strategy_combinations.default_strategy,
- strategy_combinations.cloud_tpu_strategy,
- strategy_combinations.one_device_strategy_gpu,
- ],)
-
-
-class NNBlocksTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (nn_blocks.ResidualBlock, 1, False, 0.0, None),
- (nn_blocks.ResidualBlock, 2, True, 0.2, 0.25),
- )
- def test_residual_block_creation(self, block_fn, strides, use_projection,
- stochastic_depth_drop_rate, se_ratio):
- input_size = 128
- filter_size = 256
- inputs = tf.keras.Input(
- shape=(input_size, input_size, filter_size), batch_size=1)
- block = block_fn(
- filter_size,
- strides,
- use_projection=use_projection,
- se_ratio=se_ratio,
- stochastic_depth_drop_rate=stochastic_depth_drop_rate,
- )
-
- features = block(inputs)
-
- self.assertAllEqual(
- [1, input_size // strides, input_size // strides, filter_size],
- features.shape.as_list())
-
- @parameterized.parameters(
- (nn_blocks.BottleneckBlock, 1, False, 0.0, None),
- (nn_blocks.BottleneckBlock, 2, True, 0.2, 0.25),
- )
- def test_bottleneck_block_creation(self, block_fn, strides, use_projection,
- stochastic_depth_drop_rate, se_ratio):
- input_size = 128
- filter_size = 256
- inputs = tf.keras.Input(
- shape=(input_size, input_size, filter_size * 4), batch_size=1)
- block = block_fn(
- filter_size,
- strides,
- use_projection=use_projection,
- se_ratio=se_ratio,
- stochastic_depth_drop_rate=stochastic_depth_drop_rate)
-
- features = block(inputs)
-
- self.assertAllEqual(
- [1, input_size // strides, input_size // strides, filter_size * 4],
- features.shape.as_list())
-
- @parameterized.parameters(
- (nn_blocks.InvertedBottleneckBlock, 1, 1, None, None),
- (nn_blocks.InvertedBottleneckBlock, 6, 1, None, None),
- (nn_blocks.InvertedBottleneckBlock, 1, 2, None, None),
- (nn_blocks.InvertedBottleneckBlock, 1, 1, 0.2, None),
- (nn_blocks.InvertedBottleneckBlock, 1, 1, None, 0.2),
- )
- def test_invertedbottleneck_block_creation(self, block_fn, expand_ratio,
- strides, se_ratio,
- stochastic_depth_drop_rate):
- input_size = 128
- in_filters = 24
- out_filters = 40
- inputs = tf.keras.Input(
- shape=(input_size, input_size, in_filters), batch_size=1)
- block = block_fn(
- in_filters=in_filters,
- out_filters=out_filters,
- expand_ratio=expand_ratio,
- strides=strides,
- se_ratio=se_ratio,
- stochastic_depth_drop_rate=stochastic_depth_drop_rate)
-
- features = block(inputs)
-
- self.assertAllEqual(
- [1, input_size // strides, input_size // strides, out_filters],
- features.shape.as_list())
-
- @parameterized.parameters(
- (nn_blocks.TuckerConvBlock, 1, 0.25, 0.25),
- (nn_blocks.TuckerConvBlock, 2, 0.25, 0.25),
- )
- def test_tucker_conv_block(
- self, block_fn, strides,
- input_compression_ratio, output_compression_ratio):
- input_size = 128
- in_filters = 24
- out_filters = 24
- inputs = tf.keras.Input(
- shape=(input_size, input_size, in_filters), batch_size=1)
- block = block_fn(
- in_filters=in_filters,
- out_filters=out_filters,
- input_compression_ratio=input_compression_ratio,
- output_compression_ratio=output_compression_ratio,
- strides=strides)
-
- features = block(inputs)
-
- self.assertAllEqual(
- [1, input_size // strides, input_size // strides, out_filters],
- features.shape.as_list())
-
-
-class ResidualInnerTest(parameterized.TestCase, tf.test.TestCase):
-
- @combinations.generate(distribution_strategy_combinations())
- def test_shape(self, distribution):
- bsz, h, w, c = 8, 32, 32, 32
- filters = 64
- strides = 2
-
- input_tensor = tf.random.uniform(shape=[bsz, h, w, c])
- with distribution.scope():
- test_layer = nn_blocks.ResidualInner(filters, strides)
-
- output = test_layer(input_tensor)
- expected_output_shape = [bsz, h // strides, w // strides, filters]
- self.assertEqual(expected_output_shape, output.shape.as_list())
-
-
-class BottleneckResidualInnerTest(parameterized.TestCase, tf.test.TestCase):
-
- @combinations.generate(distribution_strategy_combinations())
- def test_shape(self, distribution):
- bsz, h, w, c = 8, 32, 32, 32
- filters = 64
- strides = 2
-
- input_tensor = tf.random.uniform(shape=[bsz, h, w, c])
- with distribution.scope():
- test_layer = nn_blocks.BottleneckResidualInner(filters, strides)
-
- output = test_layer(input_tensor)
- expected_output_shape = [bsz, h // strides, w // strides, filters * 4]
- self.assertEqual(expected_output_shape, output.shape.as_list())
-
-
-class DepthwiseSeparableConvBlockTest(parameterized.TestCase, tf.test.TestCase):
-
- @combinations.generate(distribution_strategy_combinations())
- def test_shape(self, distribution):
- batch_size, height, width, num_channels = 8, 32, 32, 32
- num_filters = 64
- strides = 2
-
- input_tensor = tf.random.normal(
- shape=[batch_size, height, width, num_channels])
- with distribution.scope():
- block = nn_blocks.DepthwiseSeparableConvBlock(
- num_filters, strides=strides)
- config_dict = block.get_config()
- recreate_block = nn_blocks.DepthwiseSeparableConvBlock(**config_dict)
-
- output_tensor = block(input_tensor)
- expected_output_shape = [
- batch_size, height // strides, width // strides, num_filters
- ]
- self.assertEqual(output_tensor.shape.as_list(), expected_output_shape)
-
- output_tensor = recreate_block(input_tensor)
- self.assertEqual(output_tensor.shape.as_list(), expected_output_shape)
-
-
-class ReversibleLayerTest(parameterized.TestCase, tf.test.TestCase):
-
- @combinations.generate(distribution_strategy_combinations())
- def test_downsampling_non_reversible_step(self, distribution):
- bsz, h, w, c = 8, 32, 32, 32
- filters = 64
- strides = 2
-
- input_tensor = tf.random.uniform(shape=[bsz, h, w, c])
- with distribution.scope():
- f = nn_blocks.ResidualInner(
- filters=filters // 2, strides=strides, batch_norm_first=True)
- g = nn_blocks.ResidualInner(
- filters=filters // 2, strides=1, batch_norm_first=True)
- test_layer = nn_blocks.ReversibleLayer(f, g)
- test_layer.build(input_tensor.shape)
- optimizer = tf.keras.optimizers.SGD(learning_rate=0.01)
-
- @tf.function
- def step_fn():
- with tf.GradientTape() as tape:
- output = test_layer(input_tensor, training=True)
- grads = tape.gradient(output, test_layer.trainable_variables)
- # Test applying gradients with optimizer works
- optimizer.apply_gradients(zip(grads, test_layer.trainable_variables))
-
- return output
-
- replica_output = distribution.run(step_fn)
- outputs = distribution.experimental_local_results(replica_output)
-
- # Assert forward pass shape
- expected_output_shape = [bsz, h // strides, w // strides, filters]
- for output in outputs:
- self.assertEqual(expected_output_shape, output.shape.as_list())
-
- @combinations.generate(distribution_strategy_combinations())
- def test_reversible_step(self, distribution):
- # Reversible layers satisfy: (a) strides = 1 (b) in_filter = out_filter
- bsz, h, w, c = 8, 32, 32, 32
- filters = c
- strides = 1
-
- input_tensor = tf.random.uniform(shape=[bsz, h, w, c])
- with distribution.scope():
- f = nn_blocks.ResidualInner(
- filters=filters // 2, strides=strides, batch_norm_first=False)
- g = nn_blocks.ResidualInner(
- filters=filters // 2, strides=1, batch_norm_first=False)
- test_layer = nn_blocks.ReversibleLayer(f, g)
- test_layer(input_tensor, training=False) # init weights
- optimizer = tf.keras.optimizers.SGD(learning_rate=0.01)
-
- @tf.function
- def step_fn():
- with tf.GradientTape() as tape:
- output = test_layer(input_tensor, training=True)
- grads = tape.gradient(output, test_layer.trainable_variables)
- # Test applying gradients with optimizer works
- optimizer.apply_gradients(zip(grads, test_layer.trainable_variables))
-
- return output
-
- @tf.function
- def fwd():
- test_layer(input_tensor)
-
- distribution.run(fwd) # Initialize variables
- prev_variables = tf.identity_n(test_layer.trainable_variables)
- replica_output = distribution.run(step_fn)
- outputs = distribution.experimental_local_results(replica_output)
-
- # Assert variables values have changed values
- for v0, v1 in zip(prev_variables, test_layer.trainable_variables):
- self.assertNotAllEqual(v0, v1)
-
- # Assert forward pass shape
- expected_output_shape = [bsz, h // strides, w // strides, filters]
- for output in outputs:
- self.assertEqual(expected_output_shape, output.shape.as_list())
-
- @combinations.generate(distribution_strategy_combinations())
- def test_manual_gradients_correctness(self, distribution):
- bsz, h, w, c = 8, 32, 32, 32
- filters = c
- strides = 1
-
- input_tensor = tf.random.uniform(shape=[bsz, h, w, c * 4]) # bottleneck
- with distribution.scope():
- f_manual = nn_blocks.BottleneckResidualInner(
- filters=filters // 2, strides=strides, batch_norm_first=False)
- g_manual = nn_blocks.BottleneckResidualInner(
- filters=filters // 2, strides=1, batch_norm_first=False)
- manual_grad_layer = nn_blocks.ReversibleLayer(f_manual, g_manual)
- manual_grad_layer(input_tensor, training=False) # init weights
-
- f_auto = nn_blocks.BottleneckResidualInner(
- filters=filters // 2, strides=strides, batch_norm_first=False)
- g_auto = nn_blocks.BottleneckResidualInner(
- filters=filters // 2, strides=1, batch_norm_first=False)
- auto_grad_layer = nn_blocks.ReversibleLayer(
- f_auto, g_auto, manual_grads=False)
- auto_grad_layer(input_tensor) # init weights
- # Clone all weights (tf.keras.layers.Layer has no .clone())
- auto_grad_layer._f.set_weights(manual_grad_layer._f.get_weights())
- auto_grad_layer._g.set_weights(manual_grad_layer._g.get_weights())
-
- @tf.function
- def manual_fn():
- with tf.GradientTape() as tape:
- output = manual_grad_layer(input_tensor, training=True)
- grads = tape.gradient(output, manual_grad_layer.trainable_variables)
- return grads
-
- @tf.function
- def auto_fn():
- with tf.GradientTape() as tape:
- output = auto_grad_layer(input_tensor, training=True)
- grads = tape.gradient(output, auto_grad_layer.trainable_variables)
- return grads
-
- manual_grads = distribution.run(manual_fn)
- auto_grads = distribution.run(auto_fn)
-
- # Assert gradients calculated manually are close to that from autograd
- for manual_grad, auto_grad in zip(manual_grads, auto_grads):
- self.assertAllClose(
- distribution.experimental_local_results(manual_grad),
- distribution.experimental_local_results(auto_grad),
- atol=5e-3,
- rtol=5e-3)
-
- # Verify that BN moving mean and variance is correct.
- for manual_var, auto_var in zip(manual_grad_layer.non_trainable_variables,
- auto_grad_layer.non_trainable_variables):
- self.assertAllClose(manual_var, auto_var)
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/layers/nn_layers.py b/official/vision/beta/modeling/layers/nn_layers.py
deleted file mode 100644
index b1252373e8390a84f86d8bf487a77062636dd65b..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/layers/nn_layers.py
+++ /dev/null
@@ -1,1277 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains common building blocks for neural networks."""
-from typing import Any, Callable, Dict, List, Mapping, Optional, Tuple, Union
-
-from absl import logging
-import tensorflow as tf
-import tensorflow_addons as tfa
-
-from official.modeling import tf_utils
-from official.vision.beta.ops import spatial_transform_ops
-
-
-# Type annotations.
-States = Dict[str, tf.Tensor]
-Activation = Union[str, Callable]
-
-
-def make_divisible(value: float,
- divisor: int,
- min_value: Optional[float] = None,
- round_down_protect: bool = True,
- ) -> int:
- """This is to ensure that all layers have channels that are divisible by 8.
-
- Args:
- value: A `float` of original value.
- divisor: An `int` of the divisor that need to be checked upon.
- min_value: A `float` of minimum value threshold.
- round_down_protect: A `bool` indicating whether round down more than 10%
- will be allowed.
-
- Returns:
- The adjusted value in `int` that is divisible against divisor.
- """
- if min_value is None:
- min_value = divisor
- new_value = max(min_value, int(value + divisor / 2) // divisor * divisor)
- # Make sure that round down does not go down by more than 10%.
- if round_down_protect and new_value < 0.9 * value:
- new_value += divisor
- return int(new_value)
-
-
-def round_filters(filters: int,
- multiplier: float,
- divisor: int = 8,
- min_depth: Optional[int] = None,
- round_down_protect: bool = True,
- skip: bool = False) -> int:
- """Rounds number of filters based on width multiplier."""
- orig_f = filters
- if skip or not multiplier:
- return filters
-
- new_filters = make_divisible(value=filters * multiplier,
- divisor=divisor,
- min_value=min_depth,
- round_down_protect=round_down_protect)
-
- logging.info('round_filter input=%s output=%s', orig_f, new_filters)
- return int(new_filters)
-
-
-def get_padding_for_kernel_size(kernel_size):
- """Compute padding size given kernel size."""
- if kernel_size == 7:
- return (3, 3)
- elif kernel_size == 3:
- return (1, 1)
- else:
- raise ValueError('Padding for kernel size {} not known.'.format(
- kernel_size))
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class SqueezeExcitation(tf.keras.layers.Layer):
- """Creates a squeeze and excitation layer."""
-
- def __init__(self,
- in_filters,
- out_filters,
- se_ratio,
- divisible_by=1,
- use_3d_input=False,
- kernel_initializer='VarianceScaling',
- kernel_regularizer=None,
- bias_regularizer=None,
- activation='relu',
- gating_activation='sigmoid',
- round_down_protect=True,
- **kwargs):
- """Initializes a squeeze and excitation layer.
-
- Args:
- in_filters: An `int` number of filters of the input tensor.
- out_filters: An `int` number of filters of the output tensor.
- se_ratio: A `float` or None. If not None, se ratio for the squeeze and
- excitation layer.
- divisible_by: An `int` that ensures all inner dimensions are divisible by
- this number.
- use_3d_input: A `bool` of whether input is 2D or 3D image.
- kernel_initializer: A `str` of kernel_initializer for convolutional
- layers.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default to None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2d.
- Default to None.
- activation: A `str` name of the activation function.
- gating_activation: A `str` name of the activation function for final
- gating function.
- round_down_protect: A `bool` of whether round down more than 10% will be
- allowed.
- **kwargs: Additional keyword arguments to be passed.
- """
- super(SqueezeExcitation, self).__init__(**kwargs)
-
- self._in_filters = in_filters
- self._out_filters = out_filters
- self._se_ratio = se_ratio
- self._divisible_by = divisible_by
- self._round_down_protect = round_down_protect
- self._use_3d_input = use_3d_input
- self._activation = activation
- self._gating_activation = gating_activation
- self._kernel_initializer = kernel_initializer
- self._kernel_regularizer = kernel_regularizer
- self._bias_regularizer = bias_regularizer
- if tf.keras.backend.image_data_format() == 'channels_last':
- if not use_3d_input:
- self._spatial_axis = [1, 2]
- else:
- self._spatial_axis = [1, 2, 3]
- else:
- if not use_3d_input:
- self._spatial_axis = [2, 3]
- else:
- self._spatial_axis = [2, 3, 4]
- self._activation_fn = tf_utils.get_activation(activation)
- self._gating_activation_fn = tf_utils.get_activation(gating_activation)
-
- def build(self, input_shape):
- num_reduced_filters = make_divisible(
- max(1, int(self._in_filters * self._se_ratio)),
- divisor=self._divisible_by,
- round_down_protect=self._round_down_protect)
-
- self._se_reduce = tf.keras.layers.Conv2D(
- filters=num_reduced_filters,
- kernel_size=1,
- strides=1,
- padding='same',
- use_bias=True,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
-
- self._se_expand = tf.keras.layers.Conv2D(
- filters=self._out_filters,
- kernel_size=1,
- strides=1,
- padding='same',
- use_bias=True,
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)
-
- super(SqueezeExcitation, self).build(input_shape)
-
- def get_config(self):
- config = {
- 'in_filters': self._in_filters,
- 'out_filters': self._out_filters,
- 'se_ratio': self._se_ratio,
- 'divisible_by': self._divisible_by,
- 'use_3d_input': self._use_3d_input,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- 'bias_regularizer': self._bias_regularizer,
- 'activation': self._activation,
- 'gating_activation': self._gating_activation,
- 'round_down_protect': self._round_down_protect,
- }
- base_config = super(SqueezeExcitation, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
- def call(self, inputs):
- x = tf.reduce_mean(inputs, self._spatial_axis, keepdims=True)
- x = self._activation_fn(self._se_reduce(x))
- x = self._gating_activation_fn(self._se_expand(x))
- return x * inputs
-
-
-def get_stochastic_depth_rate(init_rate, i, n):
- """Get drop connect rate for the ith block.
-
- Args:
- init_rate: A `float` of initial drop rate.
- i: An `int` of order of the current block.
- n: An `int` total number of blocks.
-
- Returns:
- Drop rate of the ith block.
- """
- if init_rate is not None:
- if init_rate < 0 or init_rate > 1:
- raise ValueError('Initial drop rate must be within 0 and 1.')
- rate = init_rate * float(i) / n
- else:
- rate = None
- return rate
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class StochasticDepth(tf.keras.layers.Layer):
- """Creates a stochastic depth layer."""
-
- def __init__(self, stochastic_depth_drop_rate, **kwargs):
- """Initializes a stochastic depth layer.
-
- Args:
- stochastic_depth_drop_rate: A `float` of drop rate.
- **kwargs: Additional keyword arguments to be passed.
-
- Returns:
- A output `tf.Tensor` of which should have the same shape as input.
- """
- super(StochasticDepth, self).__init__(**kwargs)
- self._drop_rate = stochastic_depth_drop_rate
-
- def get_config(self):
- config = {'drop_rate': self._drop_rate}
- base_config = super(StochasticDepth, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
- def call(self, inputs, training=None):
- if training is None:
- training = tf.keras.backend.learning_phase()
- if not training or self._drop_rate is None or self._drop_rate == 0:
- return inputs
-
- keep_prob = 1.0 - self._drop_rate
- batch_size = tf.shape(inputs)[0]
- random_tensor = keep_prob
- random_tensor += tf.random.uniform(
- [batch_size] + [1] * (inputs.shape.rank - 1), dtype=inputs.dtype)
- binary_tensor = tf.floor(random_tensor)
- output = tf.math.divide(inputs, keep_prob) * binary_tensor
- return output
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-def pyramid_feature_fusion(inputs, target_level):
- """Fuses all feature maps in the feature pyramid at the target level.
-
- Args:
- inputs: A dictionary containing the feature pyramid. The size of the input
- tensor needs to be fixed.
- target_level: An `int` of the target feature level for feature fusion.
-
- Returns:
- A `float` `tf.Tensor` of shape [batch_size, feature_height, feature_width,
- feature_channel].
- """
- # Convert keys to int.
- pyramid_feats = {int(k): v for k, v in inputs.items()}
- min_level = min(pyramid_feats.keys())
- max_level = max(pyramid_feats.keys())
- resampled_feats = []
-
- for l in range(min_level, max_level + 1):
- if l == target_level:
- resampled_feats.append(pyramid_feats[l])
- else:
- feat = pyramid_feats[l]
- target_size = list(feat.shape[1:3])
- target_size[0] *= 2**(l - target_level)
- target_size[1] *= 2**(l - target_level)
- # Casts feat to float32 so the resize op can be run on TPU.
- feat = tf.cast(feat, tf.float32)
- feat = tf.image.resize(
- feat, size=target_size, method=tf.image.ResizeMethod.BILINEAR)
- # Casts it back to be compatible with the rest opetations.
- feat = tf.cast(feat, pyramid_feats[l].dtype)
- resampled_feats.append(feat)
-
- return tf.math.add_n(resampled_feats)
-
-
-class PanopticFPNFusion(tf.keras.Model):
- """Creates a Panoptic FPN feature Fusion layer.
-
- This implements feature fusion for semantic segmentation head from the paper:
- Alexander Kirillov, Ross Girshick, Kaiming He and Piotr Dollar.
- Panoptic Feature Pyramid Networks.
- (https://arxiv.org/pdf/1901.02446.pdf)
- """
-
- def __init__(
- self,
- min_level: int = 2,
- max_level: int = 5,
- target_level: int = 2,
- num_filters: int = 128,
- num_fpn_filters: int = 256,
- activation: str = 'relu',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- **kwargs):
-
- """Initializes panoptic FPN feature fusion layer.
-
- Args:
- min_level: An `int` of minimum level to use in feature fusion.
- max_level: An `int` of maximum level to use in feature fusion.
- target_level: An `int` of the target feature level for feature fusion.
- num_filters: An `int` number of filters in conv2d layers.
- num_fpn_filters: An `int` number of filters in the FPN outputs
- activation: A `str` name of the activation function.
- kernel_regularizer: A `tf.keras.regularizers.Regularizer` object for
- Conv2D. Default is None.
- bias_regularizer: A `tf.keras.regularizers.Regularizer` object for Conv2D.
- **kwargs: Additional keyword arguments to be passed.
- Returns:
- A `float` `tf.Tensor` of shape [batch_size, feature_height, feature_width,
- feature_channel].
- """
- if target_level > max_level:
- raise ValueError('target_level should be less than max_level')
-
- self._config_dict = {
- 'min_level': min_level,
- 'max_level': max_level,
- 'target_level': target_level,
- 'num_filters': num_filters,
- 'num_fpn_filters': num_fpn_filters,
- 'activation': activation,
- 'kernel_regularizer': kernel_regularizer,
- 'bias_regularizer': bias_regularizer,
- }
- norm = tfa.layers.GroupNormalization
- conv2d = tf.keras.layers.Conv2D
- activation_fn = tf_utils.get_activation(activation)
- if tf.keras.backend.image_data_format() == 'channels_last':
- norm_axis = -1
- else:
- norm_axis = 1
- inputs = self._build_inputs(num_fpn_filters, min_level, max_level)
-
- upscaled_features = []
- for level in range(min_level, max_level + 1):
- num_conv_layers = max(1, level - target_level)
- x = inputs[str(level)]
- for i in range(num_conv_layers):
- x = conv2d(
- filters=num_filters,
- kernel_size=3,
- padding='same',
- kernel_initializer=tf.keras.initializers.VarianceScaling(),
- kernel_regularizer=kernel_regularizer,
- bias_regularizer=bias_regularizer)(x)
- x = norm(groups=32, axis=norm_axis)(x)
- x = activation_fn(x)
- if level != target_level:
- x = spatial_transform_ops.nearest_upsampling(x, scale=2)
- upscaled_features.append(x)
-
- fused_features = tf.math.add_n(upscaled_features)
- self._output_specs = {str(target_level): fused_features.get_shape()}
-
- super(PanopticFPNFusion, self).__init__(
- inputs=inputs, outputs=fused_features, **kwargs)
-
- def _build_inputs(self, num_filters: int,
- min_level: int, max_level: int):
- inputs = {}
- for level in range(min_level, max_level + 1):
- inputs[str(level)] = tf.keras.Input(shape=[None, None, num_filters])
- return inputs
-
- def get_config(self) -> Mapping[str, Any]:
- return self._config_dict
-
- @classmethod
- def from_config(cls, config, custom_objects=None):
- return cls(**config)
-
- @property
- def output_specs(self) -> Mapping[str, tf.TensorShape]:
- """A dict of {level: TensorShape} pairs for the model output."""
- return self._output_specs
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class Scale(tf.keras.layers.Layer):
- """Scales the input by a trainable scalar weight.
-
- This is useful for applying ReZero to layers, which improves convergence
- speed. This implements the paper:
- ReZero is All You Need: Fast Convergence at Large Depth.
- (https://arxiv.org/pdf/2003.04887.pdf).
- """
-
- def __init__(
- self,
- initializer: tf.keras.initializers.Initializer = 'ones',
- regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- **kwargs):
- """Initializes a scale layer.
-
- Args:
- initializer: A `str` of initializer for the scalar weight.
- regularizer: A `tf.keras.regularizers.Regularizer` for the scalar weight.
- **kwargs: Additional keyword arguments to be passed to this layer.
-
- Returns:
- An `tf.Tensor` of which should have the same shape as input.
- """
- super(Scale, self).__init__(**kwargs)
-
- self._initializer = initializer
- self._regularizer = regularizer
-
- self._scale = self.add_weight(
- name='scale',
- shape=[],
- dtype=self.dtype,
- initializer=self._initializer,
- regularizer=self._regularizer,
- trainable=True)
-
- def get_config(self):
- """Returns a dictionary containing the config used for initialization."""
- config = {
- 'initializer': self._initializer,
- 'regularizer': self._regularizer,
- }
- base_config = super(Scale, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
- def call(self, inputs):
- """Calls the layer with the given inputs."""
- scale = tf.cast(self._scale, inputs.dtype)
- return scale * inputs
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class TemporalSoftmaxPool(tf.keras.layers.Layer):
- """Creates a network layer corresponding to temporal softmax pooling.
-
- This is useful for multi-class logits (used in e.g., Charades). Modified from
- AssembleNet Charades evaluation from:
-
- Michael S. Ryoo, AJ Piergiovanni, Mingxing Tan, Anelia Angelova.
- AssembleNet: Searching for Multi-Stream Neural Connectivity in Video
- Architectures.
- (https://arxiv.org/pdf/1905.13209.pdf).
- """
-
- def call(self, inputs):
- """Calls the layer with the given inputs."""
- assert inputs.shape.rank in (3, 4, 5)
- frames = tf.shape(inputs)[1]
- pre_logits = inputs / tf.sqrt(tf.cast(frames, inputs.dtype))
- activations = tf.nn.softmax(pre_logits, axis=1)
- outputs = inputs * activations
- return outputs
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class PositionalEncoding(tf.keras.layers.Layer):
- """Creates a network layer that adds a sinusoidal positional encoding.
-
- Positional encoding is incremented across frames, and is added to the input.
- The positional encoding is first weighted at 0 so that the network can choose
- to ignore it. This implements:
-
- Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones,
- Aidan N. Gomez, Lukasz Kaiser, Illia Polosukhin.
- Attention Is All You Need.
- (https://arxiv.org/pdf/1706.03762.pdf).
- """
-
- def __init__(self,
- initializer: tf.keras.initializers.Initializer = 'zeros',
- cache_encoding: bool = False,
- state_prefix: Optional[str] = None,
- **kwargs):
- """Initializes positional encoding.
-
- Args:
- initializer: A `str` of initializer for weighting the positional encoding.
- cache_encoding: A `bool`. If True, cache the positional encoding tensor
- after calling build. Otherwise, rebuild the tensor for every call.
- Setting this to False can be useful when we want to input a variable
- number of frames, so the positional encoding tensor can change shape.
- state_prefix: a prefix string to identify states.
- **kwargs: Additional keyword arguments to be passed to this layer.
-
- Returns:
- A `tf.Tensor` of which should have the same shape as input.
- """
- super(PositionalEncoding, self).__init__(**kwargs)
- self._initializer = initializer
- self._cache_encoding = cache_encoding
- self._pos_encoding = None
- self._rezero = Scale(initializer=initializer, name='rezero')
- state_prefix = state_prefix if state_prefix is not None else ''
- self._state_prefix = state_prefix
- self._frame_count_name = f'{state_prefix}_pos_enc_frame_count'
-
- def get_config(self):
- """Returns a dictionary containing the config used for initialization."""
- config = {
- 'initializer': self._initializer,
- 'cache_encoding': self._cache_encoding,
- 'state_prefix': self._state_prefix,
- }
- base_config = super(PositionalEncoding, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
- def _positional_encoding(self,
- num_positions: Union[int, tf.Tensor],
- hidden_size: Union[int, tf.Tensor],
- start_position: Union[int, tf.Tensor] = 0,
- dtype: str = 'float32') -> tf.Tensor:
- """Creates a sequence of sinusoidal positional encoding vectors.
-
- Args:
- num_positions: the total number of positions (frames).
- hidden_size: the number of channels used for the hidden vectors.
- start_position: the start position.
- dtype: the dtype of the output tensor.
-
- Returns:
- The positional encoding tensor with shape [num_positions, hidden_size].
- """
- if isinstance(start_position, tf.Tensor) and start_position.shape.rank == 1:
- start_position = start_position[0]
-
- # Calling `tf.range` with `dtype=tf.bfloat16` results in an error,
- # so we cast afterward.
- positions = tf.range(start_position, start_position + num_positions)
- positions = tf.cast(positions, dtype)[:, tf.newaxis]
- idx = tf.range(hidden_size)[tf.newaxis, :]
-
- power = tf.cast(2 * (idx // 2), dtype)
- power /= tf.cast(hidden_size, dtype)
- angles = 1. / tf.math.pow(10_000., power)
- radians = positions * angles
-
- sin = tf.math.sin(radians[:, 0::2])
- cos = tf.math.cos(radians[:, 1::2])
- pos_encoding = tf.concat([sin, cos], axis=-1)
-
- return pos_encoding
-
- def _get_pos_encoding(self,
- input_shape: tf.Tensor,
- frame_count: int = 0) -> tf.Tensor:
- """Calculates the positional encoding from the input shape.
-
- Args:
- input_shape: the shape of the input.
- frame_count: a count of frames that indicates the index of the first
- frame.
-
- Returns:
- The positional encoding tensor with shape [num_positions, hidden_size].
-
- """
- frames = input_shape[1]
- channels = input_shape[-1]
- pos_encoding = self._positional_encoding(
- frames, channels, start_position=frame_count, dtype=self.dtype)
- pos_encoding = tf.reshape(pos_encoding, [1, frames, 1, 1, channels])
- return pos_encoding
-
- def build(self, input_shape):
- """Builds the layer with the given input shape.
-
- Args:
- input_shape: The input shape.
-
- Raises:
- ValueError: If using 'channels_first' data format.
- """
- if tf.keras.backend.image_data_format() == 'channels_first':
- raise ValueError('"channels_first" mode is unsupported.')
-
- if self._cache_encoding:
- self._pos_encoding = self._get_pos_encoding(input_shape)
-
- super(PositionalEncoding, self).build(input_shape)
-
- def call(
- self,
- inputs: tf.Tensor,
- states: Optional[States] = None,
- output_states: bool = True,
- ) -> Union[tf.Tensor, Tuple[tf.Tensor, States]]:
- """Calls the layer with the given inputs.
-
- Args:
- inputs: An input `tf.Tensor`.
- states: A `dict` of states such that, if any of the keys match for this
- layer, will overwrite the contents of the buffer(s). Expected keys
- include `state_prefix + '_pos_enc_frame_count'`.
- output_states: A `bool`. If True, returns the output tensor and output
- states. Returns just the output tensor otherwise.
-
- Returns:
- An output `tf.Tensor` (and optionally the states if `output_states=True`).
-
- Raises:
- ValueError: If using 'channels_first' data format.
- """
- states = dict(states) if states is not None else {}
-
- # Keep a count of frames encountered across input iterations in
- # num_frames to be able to accurately update the positional encoding.
- num_frames = tf.shape(inputs)[1]
- frame_count = tf.cast(states.get(self._frame_count_name, [0]), tf.int32)
- states[self._frame_count_name] = frame_count + num_frames
-
- if self._cache_encoding:
- pos_encoding = self._pos_encoding
- else:
- pos_encoding = self._get_pos_encoding(
- tf.shape(inputs), frame_count=frame_count)
- pos_encoding = tf.cast(pos_encoding, inputs.dtype)
- pos_encoding = self._rezero(pos_encoding)
- outputs = inputs + pos_encoding
-
- return (outputs, states) if output_states else outputs
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class GlobalAveragePool3D(tf.keras.layers.Layer):
- """Creates a global average pooling layer with causal mode.
-
- Implements causal mode, which runs a cumulative sum (with `tf.cumsum`) across
- frames in the time dimension, allowing the use of a stream buffer. Sums any
- valid input state with the current input to allow state to accumulate over
- several iterations.
- """
-
- def __init__(self,
- keepdims: bool = False,
- causal: bool = False,
- state_prefix: Optional[str] = None,
- **kwargs):
- """Initializes a global average pool layer.
-
- Args:
- keepdims: A `bool`. If True, keep the averaged dimensions.
- causal: A `bool` of whether to run in causal mode with a cumulative sum
- across frames.
- state_prefix: a prefix string to identify states.
- **kwargs: Additional keyword arguments to be passed to this layer.
-
- Returns:
- An output `tf.Tensor`.
- """
- super(GlobalAveragePool3D, self).__init__(**kwargs)
-
- self._keepdims = keepdims
- self._causal = causal
- state_prefix = state_prefix if state_prefix is not None else ''
- self._state_prefix = state_prefix
-
- self._state_name = f'{state_prefix}_pool_buffer'
- self._frame_count_name = f'{state_prefix}_pool_frame_count'
-
- def get_config(self):
- """Returns a dictionary containing the config used for initialization."""
- config = {
- 'keepdims': self._keepdims,
- 'causal': self._causal,
- 'state_prefix': self._state_prefix,
- }
- base_config = super(GlobalAveragePool3D, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
- def call(self,
- inputs: tf.Tensor,
- states: Optional[States] = None,
- output_states: bool = True
- ) -> Union[tf.Tensor, Tuple[tf.Tensor, States]]:
- """Calls the layer with the given inputs.
-
- Args:
- inputs: An input `tf.Tensor`.
- states: A `dict` of states such that, if any of the keys match for this
- layer, will overwrite the contents of the buffer(s).
- Expected keys include `state_prefix + '__pool_buffer'` and
- `state_prefix + '__pool_frame_count'`.
- output_states: A `bool`. If True, returns the output tensor and output
- states. Returns just the output tensor otherwise.
-
- Returns:
- An output `tf.Tensor` (and optionally the states if `output_states=True`).
- If `causal=True`, the output tensor will have shape
- `[batch_size, num_frames, 1, 1, channels]` if `keepdims=True`. We keep
- the frame dimension in this case to simulate a cumulative global average
- as if we are inputting one frame at a time. If `causal=False`, the output
- is equivalent to `tf.keras.layers.GlobalAveragePooling3D` with shape
- `[batch_size, 1, 1, 1, channels]` if `keepdims=True` (plus the optional
- buffer stored in `states`).
-
- Raises:
- ValueError: If using 'channels_first' data format.
- """
- states = dict(states) if states is not None else {}
-
- if tf.keras.backend.image_data_format() == 'channels_first':
- raise ValueError('"channels_first" mode is unsupported.')
-
- # Shape: [batch_size, 1, 1, 1, channels]
- buffer = states.get(self._state_name, None)
- if buffer is None:
- buffer = tf.zeros_like(inputs[:, :1, :1, :1], dtype=inputs.dtype)
- states[self._state_name] = buffer
-
- # Keep a count of frames encountered across input iterations in
- # num_frames to be able to accurately take a cumulative average across
- # all frames when running in streaming mode
- num_frames = tf.shape(inputs)[1]
- frame_count = states.get(self._frame_count_name, tf.constant([0]))
- frame_count = tf.cast(frame_count, tf.int32)
- states[self._frame_count_name] = frame_count + num_frames
-
- if self._causal:
- # Take a mean of spatial dimensions to make computation more efficient.
- x = tf.reduce_mean(inputs, axis=[2, 3], keepdims=True)
- x = tf.cumsum(x, axis=1)
- x = x + buffer
-
- # The last frame will be the value of the next state
- # Shape: [batch_size, 1, 1, 1, channels]
- states[self._state_name] = x[:, -1:]
-
- # In causal mode, the divisor increments by 1 for every frame to
- # calculate cumulative averages instead of one global average
- mean_divisors = tf.range(num_frames) + frame_count + 1
- mean_divisors = tf.reshape(mean_divisors, [1, num_frames, 1, 1, 1])
- mean_divisors = tf.cast(mean_divisors, x.dtype)
-
- # Shape: [batch_size, num_frames, 1, 1, channels]
- x = x / mean_divisors
- else:
- # In non-causal mode, we (optionally) sum across frames to take a
- # cumulative average across input iterations rather than individual
- # frames. If no buffer state is passed, this essentially becomes
- # regular global average pooling.
- # Shape: [batch_size, 1, 1, 1, channels]
- x = tf.reduce_sum(inputs, axis=(1, 2, 3), keepdims=True)
- x = x / tf.cast(tf.shape(inputs)[2] * tf.shape(inputs)[3], x.dtype)
- x = x + buffer
-
- # Shape: [batch_size, 1, 1, 1, channels]
- states[self._state_name] = x
-
- x = x / tf.cast(frame_count + num_frames, x.dtype)
-
- if not self._keepdims:
- x = tf.squeeze(x, axis=(1, 2, 3))
-
- return (x, states) if output_states else x
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class SpatialAveragePool3D(tf.keras.layers.Layer):
- """Creates a global average pooling layer pooling across spatial dimentions."""
-
- def __init__(self, keepdims: bool = False, **kwargs):
- """Initializes a global average pool layer.
-
- Args:
- keepdims: A `bool`. If True, keep the averaged dimensions.
- **kwargs: Additional keyword arguments to be passed to this layer.
-
- Returns:
- An output `tf.Tensor`.
- """
- super(SpatialAveragePool3D, self).__init__(**kwargs)
- self._keepdims = keepdims
-
- def get_config(self):
- """Returns a dictionary containing the config used for initialization."""
- config = {
- 'keepdims': self._keepdims,
- }
- base_config = super(SpatialAveragePool3D, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
- def build(self, input_shape):
- """Builds the layer with the given input shape."""
- if tf.keras.backend.image_data_format() == 'channels_first':
- raise ValueError('"channels_first" mode is unsupported.')
-
- super(SpatialAveragePool3D, self).build(input_shape)
-
- def call(self, inputs):
- """Calls the layer with the given inputs."""
- if inputs.shape.rank != 5:
- raise ValueError(
- 'Input should have rank {}, got {}'.format(5, inputs.shape.rank))
-
- return tf.reduce_mean(inputs, axis=(2, 3), keepdims=self._keepdims)
-
-
-class CausalConvMixin:
- """Mixin class to implement CausalConv for `tf.keras.layers.Conv` layers."""
-
- @property
- def use_buffered_input(self) -> bool:
- return self._use_buffered_input
-
- @use_buffered_input.setter
- def use_buffered_input(self, variable: bool):
- self._use_buffered_input = variable
-
- def _compute_buffered_causal_padding(self,
- inputs: tf.Tensor,
- use_buffered_input: bool = False,
- time_axis: int = 1,
- ) -> List[List[int]]:
- """Calculates padding for 'causal' option for conv layers.
-
- Args:
- inputs: An optional input `tf.Tensor` to be padded.
- use_buffered_input: A `bool`. If True, use 'valid' padding along the time
- dimension. This should be set when applying the stream buffer.
- time_axis: An `int` of the axis of the time dimension.
-
- Returns:
- A list of paddings for `tf.pad`.
- """
- input_shape = tf.shape(inputs)[1:-1]
-
- if tf.keras.backend.image_data_format() == 'channels_first':
- raise ValueError('"channels_first" mode is unsupported.')
-
- kernel_size_effective = [
- (self.kernel_size[i] +
- (self.kernel_size[i] - 1) * (self.dilation_rate[i] - 1))
- for i in range(self.rank)
- ]
- pad_total = [kernel_size_effective[0] - 1]
- for i in range(1, self.rank):
- overlap = (input_shape[i] - 1) % self.strides[i] + 1
- pad_total.append(tf.maximum(kernel_size_effective[i] - overlap, 0))
- pad_beg = [pad_total[i] // 2 for i in range(self.rank)]
- pad_end = [pad_total[i] - pad_beg[i] for i in range(self.rank)]
- padding = [[pad_beg[i], pad_end[i]] for i in range(self.rank)]
- padding = [[0, 0]] + padding + [[0, 0]]
-
- if use_buffered_input:
- padding[time_axis] = [0, 0]
- else:
- padding[time_axis] = [padding[time_axis][0] + padding[time_axis][1], 0]
- return padding
-
- def _causal_validate_init(self):
- """Validates the Conv layer initial configuration."""
- # Overriding this method is meant to circumvent unnecessary errors when
- # using causal padding.
- if (self.filters is not None
- and self.filters % self.groups != 0):
- raise ValueError(
- 'The number of filters must be evenly divisible by the number of '
- 'groups. Received: groups={}, filters={}'.format(
- self.groups, self.filters))
-
- if not all(self.kernel_size):
- raise ValueError('The argument `kernel_size` cannot contain 0(s). '
- 'Received: %s' % (self.kernel_size,))
-
- def _buffered_spatial_output_shape(self, spatial_output_shape: List[int]):
- """Computes the spatial output shape from the input shape."""
- # When buffer padding, use 'valid' padding across time. The output shape
- # across time should be the input shape minus any padding, assuming
- # the stride across time is 1.
- if self._use_buffered_input and spatial_output_shape[0] is not None:
- padding = self._compute_buffered_causal_padding(
- tf.zeros([1] + spatial_output_shape + [1]), use_buffered_input=False)
- spatial_output_shape[0] -= sum(padding[1])
- return spatial_output_shape
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class Conv2D(tf.keras.layers.Conv2D, CausalConvMixin):
- """Conv2D layer supporting CausalConv.
-
- Supports `padding='causal'` option (like in `tf.keras.layers.Conv1D`),
- which applies causal padding to the temporal dimension, and same padding in
- the spatial dimensions.
- """
-
- def __init__(self, *args, use_buffered_input=False, **kwargs):
- """Initializes conv2d.
-
- Args:
- *args: Arguments to be passed.
- use_buffered_input: A `bool`. If True, the input is expected to be padded
- beforehand. In effect, calling this layer will use 'valid' padding on
- the temporal dimension to simulate 'causal' padding.
- **kwargs: Additional keyword arguments to be passed.
-
- Returns:
- An output `tf.Tensor` of the Conv2D operation.
- """
- super(Conv2D, self).__init__(*args, **kwargs)
- self._use_buffered_input = use_buffered_input
-
- def get_config(self):
- """Returns a dictionary containing the config used for initialization."""
- config = {
- 'use_buffered_input': self._use_buffered_input,
- }
- base_config = super(Conv2D, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
- def _compute_causal_padding(self, inputs):
- """Computes causal padding dimensions for the given inputs."""
- return self._compute_buffered_causal_padding(
- inputs, use_buffered_input=self._use_buffered_input)
-
- def _validate_init(self):
- """Validates the Conv layer initial configuration."""
- self._causal_validate_init()
-
- def _spatial_output_shape(self, spatial_input_shape: List[int]):
- """Computes the spatial output shape from the input shape."""
- shape = super(Conv2D, self)._spatial_output_shape(spatial_input_shape)
- return self._buffered_spatial_output_shape(shape)
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class DepthwiseConv2D(tf.keras.layers.DepthwiseConv2D, CausalConvMixin):
- """DepthwiseConv2D layer supporting CausalConv.
-
- Supports `padding='causal'` option (like in `tf.keras.layers.Conv1D`),
- which applies causal padding to the temporal dimension, and same padding in
- the spatial dimensions.
- """
-
- def __init__(self, *args, use_buffered_input=False, **kwargs):
- """Initializes depthwise conv2d.
-
- Args:
- *args: Arguments to be passed.
- use_buffered_input: A `bool`. If True, the input is expected to be padded
- beforehand. In effect, calling this layer will use 'valid' padding on
- the temporal dimension to simulate 'causal' padding.
- **kwargs: Additional keyword arguments to be passed.
-
- Returns:
- An output `tf.Tensor` of the DepthwiseConv2D operation.
- """
- super(DepthwiseConv2D, self).__init__(*args, **kwargs)
- self._use_buffered_input = use_buffered_input
-
- # Causal padding is unsupported by default for DepthwiseConv2D,
- # so we resort to valid padding internally. However, we handle
- # causal padding as a special case with `self._is_causal`, which is
- # defined by the super class.
- if self.padding == 'causal':
- self.padding = 'valid'
-
- def get_config(self):
- """Returns a dictionary containing the config used for initialization."""
- config = {
- 'use_buffered_input': self._use_buffered_input,
- }
- base_config = super(DepthwiseConv2D, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
- def call(self, inputs):
- """Calls the layer with the given inputs."""
- if self._is_causal:
- inputs = tf.pad(inputs, self._compute_causal_padding(inputs))
- return super(DepthwiseConv2D, self).call(inputs)
-
- def _compute_causal_padding(self, inputs):
- """Computes causal padding dimensions for the given inputs."""
- return self._compute_buffered_causal_padding(
- inputs, use_buffered_input=self._use_buffered_input)
-
- def _validate_init(self):
- """Validates the Conv layer initial configuration."""
- self._causal_validate_init()
-
- def _spatial_output_shape(self, spatial_input_shape: List[int]):
- """Computes the spatial output shape from the input shape."""
- shape = super(DepthwiseConv2D, self)._spatial_output_shape(
- spatial_input_shape)
- return self._buffered_spatial_output_shape(shape)
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class Conv3D(tf.keras.layers.Conv3D, CausalConvMixin):
- """Conv3D layer supporting CausalConv.
-
- Supports `padding='causal'` option (like in `tf.keras.layers.Conv1D`),
- which applies causal padding to the temporal dimension, and same padding in
- the spatial dimensions.
- """
-
- def __init__(self, *args, use_buffered_input=False, **kwargs):
- """Initializes conv3d.
-
- Args:
- *args: Arguments to be passed.
- use_buffered_input: A `bool`. If True, the input is expected to be padded
- beforehand. In effect, calling this layer will use 'valid' padding on
- the temporal dimension to simulate 'causal' padding.
- **kwargs: Additional keyword arguments to be passed.
-
- Returns:
- An output `tf.Tensor` of the Conv3D operation.
- """
- super(Conv3D, self).__init__(*args, **kwargs)
- self._use_buffered_input = use_buffered_input
-
- def get_config(self):
- """Returns a dictionary containing the config used for initialization."""
- config = {
- 'use_buffered_input': self._use_buffered_input,
- }
- base_config = super(Conv3D, self).get_config()
- return dict(list(base_config.items()) + list(config.items()))
-
- def call(self, inputs):
- """Call the layer with the given inputs."""
- # Note: tf.nn.conv3d with depthwise kernels on CPU is currently only
- # supported when compiling with TF graph (XLA) using tf.function, so it
- # is compiled by default here (b/186463870).
- conv_fn = tf.function(super(Conv3D, self).call, jit_compile=True)
- return conv_fn(inputs)
-
- def _compute_causal_padding(self, inputs):
- """Computes causal padding dimensions for the given inputs."""
- return self._compute_buffered_causal_padding(
- inputs, use_buffered_input=self._use_buffered_input)
-
- def _validate_init(self):
- """Validates the Conv layer initial configuration."""
- self._causal_validate_init()
-
- def _spatial_output_shape(self, spatial_input_shape: List[int]):
- """Computes the spatial output shape from the input shape."""
- shape = super(Conv3D, self)._spatial_output_shape(spatial_input_shape)
- return self._buffered_spatial_output_shape(shape)
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class SpatialPyramidPooling(tf.keras.layers.Layer):
- """Implements the Atrous Spatial Pyramid Pooling.
-
- References:
- [Rethinking Atrous Convolution for Semantic Image Segmentation](
- https://arxiv.org/pdf/1706.05587.pdf)
- [Encoder-Decoder with Atrous Separable Convolution for Semantic Image
- Segmentation](https://arxiv.org/pdf/1802.02611.pdf)
- """
-
- def __init__(
- self,
- output_channels: int,
- dilation_rates: List[int],
- pool_kernel_size: Optional[List[int]] = None,
- use_sync_bn: bool = False,
- batchnorm_momentum: float = 0.99,
- batchnorm_epsilon: float = 0.001,
- activation: str = 'relu',
- dropout: float = 0.5,
- kernel_initializer: str = 'GlorotUniform',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- interpolation: str = 'bilinear',
- use_depthwise_convolution: bool = False,
- **kwargs):
- """Initializes `SpatialPyramidPooling`.
-
- Args:
- output_channels: Number of channels produced by SpatialPyramidPooling.
- dilation_rates: A list of integers for parallel dilated conv.
- pool_kernel_size: A list of integers or None. If None, global average
- pooling is applied, otherwise an average pooling of pool_kernel_size is
- applied.
- use_sync_bn: A bool, whether or not to use sync batch normalization.
- batchnorm_momentum: A float for the momentum in BatchNorm. Defaults to
- 0.99.
- batchnorm_epsilon: A float for the epsilon value in BatchNorm. Defaults to
- 0.001.
- activation: A `str` for type of activation to be used. Defaults to 'relu'.
- dropout: A float for the dropout rate before output. Defaults to 0.5.
- kernel_initializer: Kernel initializer for conv layers. Defaults to
- `glorot_uniform`.
- kernel_regularizer: Kernel regularizer for conv layers. Defaults to None.
- interpolation: The interpolation method for upsampling. Defaults to
- `bilinear`.
- use_depthwise_convolution: Allows spatial pooling to be separable
- depthwise convolusions. [Encoder-Decoder with Atrous Separable
- Convolution for Semantic Image Segmentation](
- https://arxiv.org/pdf/1802.02611.pdf)
- **kwargs: Other keyword arguments for the layer.
- """
- super().__init__(**kwargs)
-
- self._output_channels = output_channels
- self._dilation_rates = dilation_rates
- self._use_sync_bn = use_sync_bn
- self._batchnorm_momentum = batchnorm_momentum
- self._batchnorm_epsilon = batchnorm_epsilon
- self._activation = activation
- self._dropout = dropout
- self._kernel_initializer = kernel_initializer
- self._kernel_regularizer = kernel_regularizer
- self._interpolation = interpolation
- self._pool_kernel_size = pool_kernel_size
- self._use_depthwise_convolution = use_depthwise_convolution
- self._activation_fn = tf_utils.get_activation(activation)
- if self._use_sync_bn:
- self._bn_op = tf.keras.layers.experimental.SyncBatchNormalization
- else:
- self._bn_op = tf.keras.layers.BatchNormalization
-
- if tf.keras.backend.image_data_format() == 'channels_last':
- self._bn_axis = -1
- else:
- self._bn_axis = 1
-
- def build(self, input_shape):
- height = input_shape[1]
- width = input_shape[2]
- channels = input_shape[3]
-
- self.aspp_layers = []
-
- conv1 = tf.keras.layers.Conv2D(
- filters=self._output_channels,
- kernel_size=(1, 1),
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- use_bias=False)
- norm1 = self._bn_op(
- axis=self._bn_axis,
- momentum=self._batchnorm_momentum,
- epsilon=self._batchnorm_epsilon)
-
- self.aspp_layers.append([conv1, norm1])
-
- for dilation_rate in self._dilation_rates:
- leading_layers = []
- kernel_size = (3, 3)
- if self._use_depthwise_convolution:
- leading_layers += [
- tf.keras.layers.DepthwiseConv2D(
- depth_multiplier=1,
- kernel_size=kernel_size,
- padding='same',
- depthwise_regularizer=self._kernel_regularizer,
- depthwise_initializer=self._kernel_initializer,
- dilation_rate=dilation_rate,
- use_bias=False)
- ]
- kernel_size = (1, 1)
- conv_dilation = leading_layers + [
- tf.keras.layers.Conv2D(
- filters=self._output_channels,
- kernel_size=kernel_size,
- padding='same',
- kernel_regularizer=self._kernel_regularizer,
- kernel_initializer=self._kernel_initializer,
- dilation_rate=dilation_rate,
- use_bias=False)
- ]
- norm_dilation = self._bn_op(
- axis=self._bn_axis,
- momentum=self._batchnorm_momentum,
- epsilon=self._batchnorm_epsilon)
-
- self.aspp_layers.append(conv_dilation + [norm_dilation])
-
- if self._pool_kernel_size is None:
- pooling = [
- tf.keras.layers.GlobalAveragePooling2D(),
- tf.keras.layers.Reshape((1, 1, channels))
- ]
- else:
- pooling = [tf.keras.layers.AveragePooling2D(self._pool_kernel_size)]
-
- conv2 = tf.keras.layers.Conv2D(
- filters=self._output_channels,
- kernel_size=(1, 1),
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- use_bias=False)
- norm2 = self._bn_op(
- axis=self._bn_axis,
- momentum=self._batchnorm_momentum,
- epsilon=self._batchnorm_epsilon)
-
- self.aspp_layers.append(pooling + [conv2, norm2])
-
- self._resizing_layer = tf.keras.layers.Resizing(
- height, width, interpolation=self._interpolation, dtype=tf.float32)
-
- self._projection = [
- tf.keras.layers.Conv2D(
- filters=self._output_channels,
- kernel_size=(1, 1),
- kernel_initializer=self._kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- use_bias=False),
- self._bn_op(
- axis=self._bn_axis,
- momentum=self._batchnorm_momentum,
- epsilon=self._batchnorm_epsilon)
- ]
- self._dropout_layer = tf.keras.layers.Dropout(rate=self._dropout)
- self._concat_layer = tf.keras.layers.Concatenate(axis=-1)
-
- def call(self,
- inputs: tf.Tensor,
- training: Optional[bool] = None) -> tf.Tensor:
- if training is None:
- training = tf.keras.backend.learning_phase()
- result = []
- for i, layers in enumerate(self.aspp_layers):
- x = inputs
- for layer in layers:
- # Apply layers sequentially.
- x = layer(x, training=training)
- x = self._activation_fn(x)
-
- # Apply resize layer to the end of the last set of layers.
- if i == len(self.aspp_layers) - 1:
- x = self._resizing_layer(x)
-
- result.append(tf.cast(x, inputs.dtype))
- x = self._concat_layer(result)
- for layer in self._projection:
- x = layer(x, training=training)
- x = self._activation_fn(x)
- return self._dropout_layer(x)
-
- def get_config(self):
- config = {
- 'output_channels': self._output_channels,
- 'dilation_rates': self._dilation_rates,
- 'pool_kernel_size': self._pool_kernel_size,
- 'use_sync_bn': self._use_sync_bn,
- 'batchnorm_momentum': self._batchnorm_momentum,
- 'batchnorm_epsilon': self._batchnorm_epsilon,
- 'activation': self._activation,
- 'dropout': self._dropout,
- 'kernel_initializer': self._kernel_initializer,
- 'kernel_regularizer': self._kernel_regularizer,
- 'interpolation': self._interpolation,
- }
- base_config = super().get_config()
- return dict(list(base_config.items()) + list(config.items()))
diff --git a/official/vision/beta/modeling/layers/nn_layers_test.py b/official/vision/beta/modeling/layers/nn_layers_test.py
deleted file mode 100644
index 4a4ae6cf0e85a0b66d01df7ed5838e809dc08bff..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/layers/nn_layers_test.py
+++ /dev/null
@@ -1,419 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for nn_layers."""
-
-# Import libraries
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.vision.beta.modeling.layers import nn_layers
-
-
-class NNLayersTest(parameterized.TestCase, tf.test.TestCase):
-
- def test_scale(self):
- scale = nn_layers.Scale(initializer=tf.keras.initializers.constant(10.))
- output = scale(3.)
- self.assertAllEqual(output, 30.)
-
- def test_temporal_softmax_pool(self):
- inputs = tf.range(4, dtype=tf.float32) + 1.
- inputs = tf.reshape(inputs, [1, 4, 1, 1, 1])
- layer = nn_layers.TemporalSoftmaxPool()
- output = layer(inputs)
- self.assertAllClose(
- output,
- [[[[[0.10153633]]],
- [[[0.33481020]]],
- [[[0.82801306]]],
- [[[1.82021690]]]]])
-
- def test_positional_encoding(self):
- pos_encoding = nn_layers.PositionalEncoding(
- initializer='ones', cache_encoding=False)
- pos_encoding_cached = nn_layers.PositionalEncoding(
- initializer='ones', cache_encoding=True)
-
- inputs = tf.ones([1, 4, 1, 1, 3])
- outputs, _ = pos_encoding(inputs)
- outputs_cached, _ = pos_encoding_cached(inputs)
-
- expected = tf.constant(
- [[[[[1.0000000, 1.0000000, 2.0000000]]],
- [[[1.8414710, 1.0021545, 1.5403023]]],
- [[[1.9092975, 1.0043088, 0.5838531]]],
- [[[1.1411200, 1.0064633, 0.0100075]]]]])
-
- self.assertEqual(outputs.shape, expected.shape)
- self.assertAllClose(outputs, expected)
-
- self.assertEqual(outputs.shape, outputs_cached.shape)
- self.assertAllClose(outputs, outputs_cached)
-
- inputs = tf.ones([1, 5, 1, 1, 3])
- _ = pos_encoding(inputs)
-
- def test_positional_encoding_bfloat16(self):
- pos_encoding = nn_layers.PositionalEncoding(initializer='ones')
-
- inputs = tf.ones([1, 4, 1, 1, 3], dtype=tf.bfloat16)
- outputs, _ = pos_encoding(inputs)
-
- expected = tf.constant(
- [[[[[1.0000000, 1.0000000, 2.0000000]]],
- [[[1.8414710, 1.0021545, 1.5403023]]],
- [[[1.9092975, 1.0043088, 0.5838531]]],
- [[[1.1411200, 1.0064633, 0.0100075]]]]])
-
- self.assertEqual(outputs.shape, expected.shape)
- self.assertAllClose(outputs, expected)
-
- def test_global_average_pool_basic(self):
- pool = nn_layers.GlobalAveragePool3D(keepdims=True)
-
- inputs = tf.ones([1, 2, 3, 4, 1])
- outputs = pool(inputs, output_states=False)
-
- expected = tf.ones([1, 1, 1, 1, 1])
-
- self.assertEqual(outputs.shape, expected.shape)
- self.assertAllEqual(outputs, expected)
-
- def test_positional_encoding_stream(self):
- pos_encoding = nn_layers.PositionalEncoding(
- initializer='ones', cache_encoding=False)
-
- inputs = tf.range(4, dtype=tf.float32) + 1.
- inputs = tf.reshape(inputs, [1, 4, 1, 1, 1])
- inputs = tf.tile(inputs, [1, 1, 1, 1, 3])
- expected, _ = pos_encoding(inputs)
-
- for num_splits in [1, 2, 4]:
- frames = tf.split(inputs, num_splits, axis=1)
- states = {}
- predicted = []
- for frame in frames:
- output, states = pos_encoding(frame, states=states)
- predicted.append(output)
- predicted = tf.concat(predicted, axis=1)
-
- self.assertEqual(predicted.shape, expected.shape)
- self.assertAllClose(predicted, expected)
- self.assertAllClose(predicted, [[[[[1.0000000, 1.0000000, 2.0000000]]],
- [[[2.8414710, 2.0021544, 2.5403023]]],
- [[[3.9092975, 3.0043090, 2.5838532]]],
- [[[4.1411200, 4.0064630, 3.0100074]]]]])
-
- def test_global_average_pool_keras(self):
- pool = nn_layers.GlobalAveragePool3D(keepdims=False)
- keras_pool = tf.keras.layers.GlobalAveragePooling3D()
-
- inputs = 10 * tf.random.normal([1, 2, 3, 4, 1])
-
- outputs = pool(inputs, output_states=False)
- keras_output = keras_pool(inputs)
-
- self.assertAllEqual(outputs.shape, keras_output.shape)
- self.assertAllClose(outputs, keras_output)
-
- def test_stream_global_average_pool(self):
- gap = nn_layers.GlobalAveragePool3D(keepdims=True, causal=False)
-
- inputs = tf.range(4, dtype=tf.float32) + 1.
- inputs = tf.reshape(inputs, [1, 4, 1, 1, 1])
- inputs = tf.tile(inputs, [1, 1, 2, 2, 3])
- expected, _ = gap(inputs)
-
- for num_splits in [1, 2, 4]:
- frames = tf.split(inputs, num_splits, axis=1)
- states = {}
- predicted = None
- for frame in frames:
- predicted, states = gap(frame, states=states)
-
- self.assertEqual(predicted.shape, expected.shape)
- self.assertAllClose(predicted, expected)
- self.assertAllClose(
- predicted,
- [[[[[2.5, 2.5, 2.5]]]]])
-
- def test_causal_stream_global_average_pool(self):
- gap = nn_layers.GlobalAveragePool3D(keepdims=True, causal=True)
-
- inputs = tf.range(4, dtype=tf.float32) + 1.
- inputs = tf.reshape(inputs, [1, 4, 1, 1, 1])
- inputs = tf.tile(inputs, [1, 1, 2, 2, 3])
- expected, _ = gap(inputs)
-
- for num_splits in [1, 2, 4]:
- frames = tf.split(inputs, num_splits, axis=1)
- states = {}
- predicted = []
- for frame in frames:
- x, states = gap(frame, states=states)
- predicted.append(x)
- predicted = tf.concat(predicted, axis=1)
-
- self.assertEqual(predicted.shape, expected.shape)
- self.assertAllClose(predicted, expected)
- self.assertAllClose(
- predicted,
- [[[[[1.0, 1.0, 1.0]]],
- [[[1.5, 1.5, 1.5]]],
- [[[2.0, 2.0, 2.0]]],
- [[[2.5, 2.5, 2.5]]]]])
-
- def test_spatial_average_pool(self):
- pool = nn_layers.SpatialAveragePool3D(keepdims=True)
-
- inputs = tf.range(64, dtype=tf.float32) + 1.
- inputs = tf.reshape(inputs, [1, 4, 4, 4, 1])
-
- output = pool(inputs)
-
- self.assertEqual(output.shape, [1, 4, 1, 1, 1])
- self.assertAllClose(
- output,
- [[[[[8.50]]],
- [[[24.5]]],
- [[[40.5]]],
- [[[56.5]]]]])
-
- def test_conv2d_causal(self):
- conv2d = nn_layers.Conv2D(
- filters=3,
- kernel_size=(3, 3),
- strides=(1, 2),
- padding='causal',
- use_buffered_input=True,
- kernel_initializer='ones',
- use_bias=False,
- )
-
- inputs = tf.ones([1, 4, 2, 3])
-
- paddings = [[0, 0], [2, 0], [0, 0], [0, 0]]
- padded_inputs = tf.pad(inputs, paddings)
- predicted = conv2d(padded_inputs)
-
- expected = tf.constant(
- [[[[6.0, 6.0, 6.0]],
- [[12., 12., 12.]],
- [[18., 18., 18.]],
- [[18., 18., 18.]]]])
-
- self.assertEqual(predicted.shape, expected.shape)
- self.assertAllClose(predicted, expected)
-
- conv2d.use_buffered_input = False
- predicted = conv2d(inputs)
-
- self.assertFalse(conv2d.use_buffered_input)
- self.assertEqual(predicted.shape, expected.shape)
- self.assertAllClose(predicted, expected)
-
- def test_depthwise_conv2d_causal(self):
- conv2d = nn_layers.DepthwiseConv2D(
- kernel_size=(3, 3),
- strides=(1, 1),
- padding='causal',
- use_buffered_input=True,
- depthwise_initializer='ones',
- use_bias=False,
- )
-
- inputs = tf.ones([1, 2, 2, 3])
-
- paddings = [[0, 0], [2, 0], [0, 0], [0, 0]]
- padded_inputs = tf.pad(inputs, paddings)
- predicted = conv2d(padded_inputs)
-
- expected = tf.constant(
- [[[[2., 2., 2.],
- [2., 2., 2.]],
- [[4., 4., 4.],
- [4., 4., 4.]]]])
-
- self.assertEqual(predicted.shape, expected.shape)
- self.assertAllClose(predicted, expected)
-
- conv2d.use_buffered_input = False
- predicted = conv2d(inputs)
-
- self.assertEqual(predicted.shape, expected.shape)
- self.assertAllClose(predicted, expected)
-
- def test_conv3d_causal(self):
- conv3d = nn_layers.Conv3D(
- filters=3,
- kernel_size=(3, 3, 3),
- strides=(1, 2, 2),
- padding='causal',
- use_buffered_input=True,
- kernel_initializer='ones',
- use_bias=False,
- )
-
- inputs = tf.ones([1, 2, 4, 4, 3])
-
- paddings = [[0, 0], [2, 0], [0, 0], [0, 0], [0, 0]]
- padded_inputs = tf.pad(inputs, paddings)
- predicted = conv3d(padded_inputs)
-
- expected = tf.constant(
- [[[[[27., 27., 27.],
- [18., 18., 18.]],
- [[18., 18., 18.],
- [12., 12., 12.]]],
- [[[54., 54., 54.],
- [36., 36., 36.]],
- [[36., 36., 36.],
- [24., 24., 24.]]]]])
-
- self.assertEqual(predicted.shape, expected.shape)
- self.assertAllClose(predicted, expected)
-
- conv3d.use_buffered_input = False
- predicted = conv3d(inputs)
-
- self.assertEqual(predicted.shape, expected.shape)
- self.assertAllClose(predicted, expected)
-
- def test_depthwise_conv3d_causal(self):
- conv3d = nn_layers.Conv3D(
- filters=3,
- kernel_size=(3, 3, 3),
- strides=(1, 2, 2),
- padding='causal',
- use_buffered_input=True,
- kernel_initializer='ones',
- use_bias=False,
- groups=3,
- )
-
- inputs = tf.ones([1, 2, 4, 4, 3])
-
- paddings = [[0, 0], [2, 0], [0, 0], [0, 0], [0, 0]]
- padded_inputs = tf.pad(inputs, paddings)
- predicted = conv3d(padded_inputs)
-
- expected = tf.constant(
- [[[[[9.0, 9.0, 9.0],
- [6.0, 6.0, 6.0]],
- [[6.0, 6.0, 6.0],
- [4.0, 4.0, 4.0]]],
- [[[18.0, 18.0, 18.0],
- [12., 12., 12.]],
- [[12., 12., 12.],
- [8., 8., 8.]]]]])
-
- output_shape = conv3d._spatial_output_shape([4, 4, 4])
- self.assertAllClose(output_shape, [2, 2, 2])
-
- self.assertEqual(predicted.shape, expected.shape)
- self.assertAllClose(predicted, expected)
-
- conv3d.use_buffered_input = False
- predicted = conv3d(inputs)
-
- self.assertEqual(predicted.shape, expected.shape)
- self.assertAllClose(predicted, expected)
-
- def test_conv3d_causal_padding_2d(self):
- """Test to ensure causal padding works like standard padding."""
- conv3d = nn_layers.Conv3D(
- filters=1,
- kernel_size=(1, 3, 3),
- strides=(1, 2, 2),
- padding='causal',
- use_buffered_input=False,
- kernel_initializer='ones',
- use_bias=False,
- )
-
- keras_conv3d = tf.keras.layers.Conv3D(
- filters=1,
- kernel_size=(1, 3, 3),
- strides=(1, 2, 2),
- padding='same',
- kernel_initializer='ones',
- use_bias=False,
- )
-
- inputs = tf.ones([1, 1, 4, 4, 1])
-
- predicted = conv3d(inputs)
- expected = keras_conv3d(inputs)
-
- self.assertEqual(predicted.shape, expected.shape)
- self.assertAllClose(predicted, expected)
-
- self.assertAllClose(predicted,
- [[[[[9.],
- [6.]],
- [[6.],
- [4.]]]]])
-
- def test_conv3d_causal_padding_1d(self):
- """Test to ensure causal padding works like standard padding."""
- conv3d = nn_layers.Conv3D(
- filters=1,
- kernel_size=(3, 1, 1),
- strides=(2, 1, 1),
- padding='causal',
- use_buffered_input=False,
- kernel_initializer='ones',
- use_bias=False,
- )
-
- keras_conv1d = tf.keras.layers.Conv1D(
- filters=1,
- kernel_size=3,
- strides=2,
- padding='causal',
- kernel_initializer='ones',
- use_bias=False,
- )
-
- inputs = tf.ones([1, 4, 1, 1, 1])
-
- predicted = conv3d(inputs)
- expected = keras_conv1d(tf.squeeze(inputs, axis=[2, 3]))
- expected = tf.reshape(expected, [1, 2, 1, 1, 1])
-
- self.assertEqual(predicted.shape, expected.shape)
- self.assertAllClose(predicted, expected)
-
- self.assertAllClose(predicted,
- [[[[[1.]]],
- [[[3.]]]]])
-
- @parameterized.parameters(
- (None, []),
- (None, [6, 12, 18]),
- ([32, 32], [6, 12, 18]),
- )
- def test_aspp(self, pool_kernel_size, dilation_rates):
- inputs = tf.keras.Input(shape=(64, 64, 128), dtype=tf.float32)
- layer = nn_layers.SpatialPyramidPooling(
- output_channels=256,
- dilation_rates=dilation_rates,
- pool_kernel_size=pool_kernel_size)
- output = layer(inputs)
- self.assertAllEqual([None, 64, 64, 256], output.shape)
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/layers/roi_aligner.py b/official/vision/beta/modeling/layers/roi_aligner.py
deleted file mode 100644
index 351b8cc112af95dfe244e464996fe7f9289772c4..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/layers/roi_aligner.py
+++ /dev/null
@@ -1,72 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains definitions of ROI aligner."""
-
-from typing import Mapping
-import tensorflow as tf
-
-from official.vision.beta.ops import spatial_transform_ops
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class MultilevelROIAligner(tf.keras.layers.Layer):
- """Performs ROIAlign for the second stage processing."""
-
- def __init__(self, crop_size: int = 7, sample_offset: float = 0.5, **kwargs):
- """Initializes a ROI aligner.
-
- Args:
- crop_size: An `int` of the output size of the cropped features.
- sample_offset: A `float` in [0, 1] of the subpixel sample offset.
- **kwargs: Additional keyword arguments passed to Layer.
- """
- self._config_dict = {
- 'crop_size': crop_size,
- 'sample_offset': sample_offset,
- }
- super(MultilevelROIAligner, self).__init__(**kwargs)
-
- def call(self,
- features: Mapping[str, tf.Tensor],
- boxes: tf.Tensor,
- training: bool = None):
- """Generates ROIs.
-
- Args:
- features: A dictionary with key as pyramid level and value as features.
- The features are in shape of
- [batch_size, height_l, width_l, num_filters].
- boxes: A 3-D `tf.Tensor` of shape [batch_size, num_boxes, 4]. Each row
- represents a box with [y1, x1, y2, x2] in un-normalized coordinates.
- from grid point.
- training: A `bool` of whether it is in training mode.
-
- Returns:
- A 5-D `tf.Tensor` representing feature crop of shape
- [batch_size, num_boxes, crop_size, crop_size, num_filters].
- """
- roi_features = spatial_transform_ops.multilevel_crop_and_resize(
- features,
- boxes,
- output_size=self._config_dict['crop_size'],
- sample_offset=self._config_dict['sample_offset'])
- return roi_features
-
- def get_config(self):
- return self._config_dict
-
- @classmethod
- def from_config(cls, config, custom_objects=None):
- return cls(**config)
diff --git a/official/vision/beta/modeling/layers/roi_generator.py b/official/vision/beta/modeling/layers/roi_generator.py
deleted file mode 100644
index af79cccb614f49bc6a49d54d2f9efc090ee8dda8..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/layers/roi_generator.py
+++ /dev/null
@@ -1,313 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains definitions of ROI generator."""
-from typing import Optional, Mapping
-# Import libraries
-import tensorflow as tf
-
-from official.vision.beta.ops import box_ops
-from official.vision.beta.ops import nms
-
-
-def _multilevel_propose_rois(raw_boxes: Mapping[str, tf.Tensor],
- raw_scores: Mapping[str, tf.Tensor],
- anchor_boxes: Mapping[str, tf.Tensor],
- image_shape: tf.Tensor,
- pre_nms_top_k: int = 2000,
- pre_nms_score_threshold: float = 0.0,
- pre_nms_min_size_threshold: float = 0.0,
- nms_iou_threshold: float = 0.7,
- num_proposals: int = 1000,
- use_batched_nms: bool = False,
- decode_boxes: bool = True,
- clip_boxes: bool = True,
- apply_sigmoid_to_score: bool = True):
- """Proposes RoIs given a group of candidates from different FPN levels.
-
- The following describes the steps:
- 1. For each individual level:
- a. Apply sigmoid transform if specified.
- b. Decode boxes if specified.
- c. Clip boxes if specified.
- d. Filter small boxes and those fall outside image if specified.
- e. Apply pre-NMS filtering including pre-NMS top k and score thresholding.
- f. Apply NMS.
- 2. Aggregate post-NMS boxes from each level.
- 3. Apply an overall top k to generate the final selected RoIs.
-
- Args:
- raw_boxes: A `dict` with keys representing FPN levels and values
- representing box tenors of shape
- [batch_size, feature_h, feature_w, num_anchors * 4].
- raw_scores: A `dict` with keys representing FPN levels and values
- representing logit tensors of shape
- [batch_size, feature_h, feature_w, num_anchors].
- anchor_boxes: A `dict` with keys representing FPN levels and values
- representing anchor box tensors of shape
- [batch_size, feature_h * feature_w * num_anchors, 4].
- image_shape: A `tf.Tensor` of shape [batch_size, 2] where the last dimension
- are [height, width] of the scaled image.
- pre_nms_top_k: An `int` of top scoring RPN proposals *per level* to keep
- before applying NMS. Default: 2000.
- pre_nms_score_threshold: A `float` between 0 and 1 representing the minimal
- box score to keep before applying NMS. This is often used as a
- pre-filtering step for better performance. Default: 0, no filtering is
- applied.
- pre_nms_min_size_threshold: A `float` representing the minimal box size in
- each side (w.r.t. the scaled image) to keep before applying NMS. This is
- often used as a pre-filtering step for better performance. Default: 0, no
- filtering is applied.
- nms_iou_threshold: A `float` between 0 and 1 representing the IoU threshold
- used for NMS. If 0.0, no NMS is applied. Default: 0.7.
- num_proposals: An `int` of top scoring RPN proposals *in total* to keep
- after applying NMS. Default: 1000.
- use_batched_nms: A `bool` indicating whether NMS is applied in batch using
- `tf.image.combined_non_max_suppression`. Currently only available in
- CPU/GPU. Default is False.
- decode_boxes: A `bool` indicating whether `raw_boxes` needs to be decoded
- using `anchor_boxes`. If False, use `raw_boxes` directly and ignore
- `anchor_boxes`. Default is True.
- clip_boxes: A `bool` indicating whether boxes are first clipped to the
- scaled image size before appliying NMS. If False, no clipping is applied
- and `image_shape` is ignored. Default is True.
- apply_sigmoid_to_score: A `bool` indicating whether apply sigmoid to
- `raw_scores` before applying NMS. Default is True.
-
- Returns:
- selected_rois: A `tf.Tensor` of shape [batch_size, num_proposals, 4],
- representing the box coordinates of the selected proposals w.r.t. the
- scaled image.
- selected_roi_scores: A `tf.Tensor` of shape [batch_size, num_proposals, 1],
- representing the scores of the selected proposals.
- """
- with tf.name_scope('multilevel_propose_rois'):
- rois = []
- roi_scores = []
- image_shape = tf.expand_dims(image_shape, axis=1)
- for level in sorted(raw_scores.keys()):
- with tf.name_scope('level_%s' % level):
- _, feature_h, feature_w, num_anchors_per_location = (
- raw_scores[level].get_shape().as_list())
-
- num_boxes = feature_h * feature_w * num_anchors_per_location
- this_level_scores = tf.reshape(raw_scores[level], [-1, num_boxes])
- this_level_boxes = tf.reshape(raw_boxes[level], [-1, num_boxes, 4])
- this_level_anchors = tf.cast(
- tf.reshape(anchor_boxes[level], [-1, num_boxes, 4]),
- dtype=this_level_scores.dtype)
-
- if apply_sigmoid_to_score:
- this_level_scores = tf.sigmoid(this_level_scores)
-
- if decode_boxes:
- this_level_boxes = box_ops.decode_boxes(
- this_level_boxes, this_level_anchors)
- if clip_boxes:
- this_level_boxes = box_ops.clip_boxes(
- this_level_boxes, image_shape)
-
- if pre_nms_min_size_threshold > 0.0:
- this_level_boxes, this_level_scores = box_ops.filter_boxes(
- this_level_boxes,
- this_level_scores,
- image_shape,
- pre_nms_min_size_threshold)
-
- this_level_pre_nms_top_k = min(num_boxes, pre_nms_top_k)
- this_level_post_nms_top_k = min(num_boxes, num_proposals)
- if nms_iou_threshold > 0.0:
- if use_batched_nms:
- this_level_rois, this_level_roi_scores, _, _ = (
- tf.image.combined_non_max_suppression(
- tf.expand_dims(this_level_boxes, axis=2),
- tf.expand_dims(this_level_scores, axis=-1),
- max_output_size_per_class=this_level_pre_nms_top_k,
- max_total_size=this_level_post_nms_top_k,
- iou_threshold=nms_iou_threshold,
- score_threshold=pre_nms_score_threshold,
- pad_per_class=False,
- clip_boxes=False))
- else:
- if pre_nms_score_threshold > 0.0:
- this_level_boxes, this_level_scores = (
- box_ops.filter_boxes_by_scores(
- this_level_boxes,
- this_level_scores,
- pre_nms_score_threshold))
- this_level_boxes, this_level_scores = box_ops.top_k_boxes(
- this_level_boxes, this_level_scores, k=this_level_pre_nms_top_k)
- this_level_roi_scores, this_level_rois = (
- nms.sorted_non_max_suppression_padded(
- this_level_scores,
- this_level_boxes,
- max_output_size=this_level_post_nms_top_k,
- iou_threshold=nms_iou_threshold))
- else:
- this_level_rois, this_level_roi_scores = box_ops.top_k_boxes(
- this_level_boxes,
- this_level_scores,
- k=this_level_post_nms_top_k)
-
- rois.append(this_level_rois)
- roi_scores.append(this_level_roi_scores)
-
- all_rois = tf.concat(rois, axis=1)
- all_roi_scores = tf.concat(roi_scores, axis=1)
-
- with tf.name_scope('top_k_rois'):
- _, num_valid_rois = all_roi_scores.get_shape().as_list()
- overall_top_k = min(num_valid_rois, num_proposals)
-
- selected_rois, selected_roi_scores = box_ops.top_k_boxes(
- all_rois, all_roi_scores, k=overall_top_k)
-
- return selected_rois, selected_roi_scores
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class MultilevelROIGenerator(tf.keras.layers.Layer):
- """Proposes RoIs for the second stage processing."""
-
- def __init__(self,
- pre_nms_top_k: int = 2000,
- pre_nms_score_threshold: float = 0.0,
- pre_nms_min_size_threshold: float = 0.0,
- nms_iou_threshold: float = 0.7,
- num_proposals: int = 1000,
- test_pre_nms_top_k: int = 1000,
- test_pre_nms_score_threshold: float = 0.0,
- test_pre_nms_min_size_threshold: float = 0.0,
- test_nms_iou_threshold: float = 0.7,
- test_num_proposals: int = 1000,
- use_batched_nms: bool = False,
- **kwargs):
- """Initializes a ROI generator.
-
- The ROI generator transforms the raw predictions from RPN to ROIs.
-
- Args:
- pre_nms_top_k: An `int` of the number of top scores proposals to be kept
- before applying NMS.
- pre_nms_score_threshold: A `float` of the score threshold to apply before
- applying NMS. Proposals whose scores are below this threshold are
- thrown away.
- pre_nms_min_size_threshold: A `float` of the threshold of each side of the
- box (w.r.t. the scaled image). Proposals whose sides are below this
- threshold are thrown away.
- nms_iou_threshold: A `float` in [0, 1], the NMS IoU threshold.
- num_proposals: An `int` of the final number of proposals to generate.
- test_pre_nms_top_k: An `int` of the number of top scores proposals to be
- kept before applying NMS in testing.
- test_pre_nms_score_threshold: A `float` of the score threshold to apply
- before applying NMS in testing. Proposals whose scores are below this
- threshold are thrown away.
- test_pre_nms_min_size_threshold: A `float` of the threshold of each side
- of the box (w.r.t. the scaled image) in testing. Proposals whose sides
- are below this threshold are thrown away.
- test_nms_iou_threshold: A `float` in [0, 1] of the NMS IoU threshold in
- testing.
- test_num_proposals: An `int` of the final number of proposals to generate
- in testing.
- use_batched_nms: A `bool` of whether or not use
- `tf.image.combined_non_max_suppression`.
- **kwargs: Additional keyword arguments passed to Layer.
- """
- self._config_dict = {
- 'pre_nms_top_k': pre_nms_top_k,
- 'pre_nms_score_threshold': pre_nms_score_threshold,
- 'pre_nms_min_size_threshold': pre_nms_min_size_threshold,
- 'nms_iou_threshold': nms_iou_threshold,
- 'num_proposals': num_proposals,
- 'test_pre_nms_top_k': test_pre_nms_top_k,
- 'test_pre_nms_score_threshold': test_pre_nms_score_threshold,
- 'test_pre_nms_min_size_threshold': test_pre_nms_min_size_threshold,
- 'test_nms_iou_threshold': test_nms_iou_threshold,
- 'test_num_proposals': test_num_proposals,
- 'use_batched_nms': use_batched_nms,
- }
- super(MultilevelROIGenerator, self).__init__(**kwargs)
-
- def call(self,
- raw_boxes: Mapping[str, tf.Tensor],
- raw_scores: Mapping[str, tf.Tensor],
- anchor_boxes: Mapping[str, tf.Tensor],
- image_shape: tf.Tensor,
- training: Optional[bool] = None):
- """Proposes RoIs given a group of candidates from different FPN levels.
-
- The following describes the steps:
- 1. For each individual level:
- a. Apply sigmoid transform if specified.
- b. Decode boxes if specified.
- c. Clip boxes if specified.
- d. Filter small boxes and those fall outside image if specified.
- e. Apply pre-NMS filtering including pre-NMS top k and score
- thresholding.
- f. Apply NMS.
- 2. Aggregate post-NMS boxes from each level.
- 3. Apply an overall top k to generate the final selected RoIs.
-
- Args:
- raw_boxes: A `dict` with keys representing FPN levels and values
- representing box tenors of shape
- [batch, feature_h, feature_w, num_anchors * 4].
- raw_scores: A `dict` with keys representing FPN levels and values
- representing logit tensors of shape
- [batch, feature_h, feature_w, num_anchors].
- anchor_boxes: A `dict` with keys representing FPN levels and values
- representing anchor box tensors of shape
- [batch, feature_h * feature_w * num_anchors, 4].
- image_shape: A `tf.Tensor` of shape [batch, 2] where the last dimension
- are [height, width] of the scaled image.
- training: A `bool` that indicates whether it is in training mode.
-
- Returns:
- roi_boxes: A `tf.Tensor` of shape [batch, num_proposals, 4], the proposed
- ROIs in the scaled image coordinate.
- roi_scores: A `tf.Tensor` of shape [batch, num_proposals], scores of the
- proposed ROIs.
- """
- roi_boxes, roi_scores = _multilevel_propose_rois(
- raw_boxes,
- raw_scores,
- anchor_boxes,
- image_shape,
- pre_nms_top_k=(
- self._config_dict['pre_nms_top_k'] if training
- else self._config_dict['test_pre_nms_top_k']),
- pre_nms_score_threshold=(
- self._config_dict['pre_nms_score_threshold'] if training
- else self._config_dict['test_pre_nms_score_threshold']),
- pre_nms_min_size_threshold=(
- self._config_dict['pre_nms_min_size_threshold'] if training
- else self._config_dict['test_pre_nms_min_size_threshold']),
- nms_iou_threshold=(
- self._config_dict['nms_iou_threshold'] if training
- else self._config_dict['test_nms_iou_threshold']),
- num_proposals=(
- self._config_dict['num_proposals'] if training
- else self._config_dict['test_num_proposals']),
- use_batched_nms=self._config_dict['use_batched_nms'],
- decode_boxes=True,
- clip_boxes=True,
- apply_sigmoid_to_score=True)
- return roi_boxes, roi_scores
-
- def get_config(self):
- return self._config_dict
-
- @classmethod
- def from_config(cls, config, custom_objects=None):
- return cls(**config)
diff --git a/official/vision/beta/modeling/layers/roi_sampler.py b/official/vision/beta/modeling/layers/roi_sampler.py
deleted file mode 100644
index f3a4fd05ef8d603d5e4e332aa4fbd16a92fffce3..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/layers/roi_sampler.py
+++ /dev/null
@@ -1,175 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Contains definitions of ROI sampler."""
-# Import libraries
-
-import tensorflow as tf
-
-from official.vision.beta.modeling.layers import box_sampler
-from official.vision.beta.ops import box_matcher
-from official.vision.beta.ops import iou_similarity
-from official.vision.beta.ops import target_gather
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class ROISampler(tf.keras.layers.Layer):
- """Samples ROIs and assigns targets to the sampled ROIs."""
-
- def __init__(self,
- mix_gt_boxes: bool = True,
- num_sampled_rois: int = 512,
- foreground_fraction: float = 0.25,
- foreground_iou_threshold: float = 0.5,
- background_iou_high_threshold: float = 0.5,
- background_iou_low_threshold: float = 0,
- skip_subsampling: bool = False,
- **kwargs):
- """Initializes a ROI sampler.
-
- Args:
- mix_gt_boxes: A `bool` of whether to mix the groundtruth boxes with
- proposed ROIs.
- num_sampled_rois: An `int` of the number of sampled ROIs per image.
- foreground_fraction: A `float` in [0, 1], what percentage of proposed ROIs
- should be sampled from the foreground boxes.
- foreground_iou_threshold: A `float` that represents the IoU threshold for
- a box to be considered as positive (if >= `foreground_iou_threshold`).
- background_iou_high_threshold: A `float` that represents the IoU threshold
- for a box to be considered as negative (if overlap in
- [`background_iou_low_threshold`, `background_iou_high_threshold`]).
- background_iou_low_threshold: A `float` that represents the IoU threshold
- for a box to be considered as negative (if overlap in
- [`background_iou_low_threshold`, `background_iou_high_threshold`])
- skip_subsampling: a bool that determines if we want to skip the sampling
- procedure than balances the fg/bg classes. Used for upper frcnn layers
- in cascade RCNN.
- **kwargs: Additional keyword arguments passed to Layer.
- """
- self._config_dict = {
- 'mix_gt_boxes': mix_gt_boxes,
- 'num_sampled_rois': num_sampled_rois,
- 'foreground_fraction': foreground_fraction,
- 'foreground_iou_threshold': foreground_iou_threshold,
- 'background_iou_high_threshold': background_iou_high_threshold,
- 'background_iou_low_threshold': background_iou_low_threshold,
- 'skip_subsampling': skip_subsampling,
- }
-
- self._sim_calc = iou_similarity.IouSimilarity()
- self._box_matcher = box_matcher.BoxMatcher(
- thresholds=[
- background_iou_low_threshold, background_iou_high_threshold,
- foreground_iou_threshold
- ],
- indicators=[-3, -1, -2, 1])
- self._target_gather = target_gather.TargetGather()
-
- self._sampler = box_sampler.BoxSampler(
- num_sampled_rois, foreground_fraction)
- super(ROISampler, self).__init__(**kwargs)
-
- def call(self, boxes: tf.Tensor, gt_boxes: tf.Tensor, gt_classes: tf.Tensor):
- """Assigns the proposals with groundtruth classes and performs subsmpling.
-
- Given `proposed_boxes`, `gt_boxes`, and `gt_classes`, the function uses the
- following algorithm to generate the final `num_samples_per_image` RoIs.
- 1. Calculates the IoU between each proposal box and each gt_boxes.
- 2. Assigns each proposed box with a groundtruth class and box by choosing
- the largest IoU overlap.
- 3. Samples `num_samples_per_image` boxes from all proposed boxes, and
- returns box_targets, class_targets, and RoIs.
-
- Args:
- boxes: A `tf.Tensor` of shape of [batch_size, N, 4]. N is the number of
- proposals before groundtruth assignment. The last dimension is the
- box coordinates w.r.t. the scaled images in [ymin, xmin, ymax, xmax]
- format.
- gt_boxes: A `tf.Tensor` of shape of [batch_size, MAX_NUM_INSTANCES, 4].
- The coordinates of gt_boxes are in the pixel coordinates of the scaled
- image. This tensor might have padding of values -1 indicating the
- invalid box coordinates.
- gt_classes: A `tf.Tensor` with a shape of [batch_size, MAX_NUM_INSTANCES].
- This tensor might have paddings with values of -1 indicating the invalid
- classes.
-
- Returns:
- sampled_rois: A `tf.Tensor` of shape of [batch_size, K, 4], representing
- the coordinates of the sampled RoIs, where K is the number of the
- sampled RoIs, i.e. K = num_samples_per_image.
- sampled_gt_boxes: A `tf.Tensor` of shape of [batch_size, K, 4], storing
- the box coordinates of the matched groundtruth boxes of the samples
- RoIs.
- sampled_gt_classes: A `tf.Tensor` of shape of [batch_size, K], storing the
- classes of the matched groundtruth boxes of the sampled RoIs.
- sampled_gt_indices: A `tf.Tensor` of shape of [batch_size, K], storing the
- indices of the sampled groudntruth boxes in the original `gt_boxes`
- tensor, i.e.,
- gt_boxes[sampled_gt_indices[:, i]] = sampled_gt_boxes[:, i].
- """
- gt_boxes = tf.cast(gt_boxes, dtype=boxes.dtype)
- if self._config_dict['mix_gt_boxes']:
- boxes = tf.concat([boxes, gt_boxes], axis=1)
-
- boxes_invalid_mask = tf.less(
- tf.reduce_max(boxes, axis=-1, keepdims=True), 0.0)
- gt_invalid_mask = tf.less(
- tf.reduce_max(gt_boxes, axis=-1, keepdims=True), 0.0)
- similarity_matrix = self._sim_calc(boxes, gt_boxes, boxes_invalid_mask,
- gt_invalid_mask)
- matched_gt_indices, match_indicators = self._box_matcher(similarity_matrix)
- positive_matches = tf.greater_equal(match_indicators, 0)
- negative_matches = tf.equal(match_indicators, -1)
- ignored_matches = tf.equal(match_indicators, -2)
- invalid_matches = tf.equal(match_indicators, -3)
-
- background_mask = tf.expand_dims(
- tf.logical_or(negative_matches, invalid_matches), -1)
- gt_classes = tf.expand_dims(gt_classes, axis=-1)
- matched_gt_classes = self._target_gather(gt_classes, matched_gt_indices,
- background_mask)
- matched_gt_classes = tf.where(background_mask,
- tf.zeros_like(matched_gt_classes),
- matched_gt_classes)
- matched_gt_boxes = self._target_gather(gt_boxes, matched_gt_indices,
- tf.tile(background_mask, [1, 1, 4]))
- matched_gt_boxes = tf.where(background_mask,
- tf.zeros_like(matched_gt_boxes),
- matched_gt_boxes)
- matched_gt_indices = tf.where(
- tf.squeeze(background_mask, -1), -tf.ones_like(matched_gt_indices),
- matched_gt_indices)
-
- if self._config_dict['skip_subsampling']:
- return (boxes, matched_gt_boxes, tf.squeeze(matched_gt_classes,
- axis=-1), matched_gt_indices)
-
- sampled_indices = self._sampler(
- positive_matches, negative_matches, ignored_matches)
-
- sampled_rois = self._target_gather(boxes, sampled_indices)
- sampled_gt_boxes = self._target_gather(matched_gt_boxes, sampled_indices)
- sampled_gt_classes = tf.squeeze(self._target_gather(
- matched_gt_classes, sampled_indices), axis=-1)
- sampled_gt_indices = tf.squeeze(self._target_gather(
- tf.expand_dims(matched_gt_indices, -1), sampled_indices), axis=-1)
- return (sampled_rois, sampled_gt_boxes, sampled_gt_classes,
- sampled_gt_indices)
-
- def get_config(self):
- return self._config_dict
-
- @classmethod
- def from_config(cls, config):
- return cls(**config)
diff --git a/official/vision/beta/modeling/maskrcnn_model.py b/official/vision/beta/modeling/maskrcnn_model.py
deleted file mode 100644
index ca76cfb7f343cf8cf8383d0be0ce1c1c9076c41e..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/maskrcnn_model.py
+++ /dev/null
@@ -1,429 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""R-CNN(-RS) models."""
-
-from typing import Any, List, Mapping, Optional, Tuple, Union
-
-import tensorflow as tf
-
-from official.vision.beta.ops import anchor
-from official.vision.beta.ops import box_ops
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class MaskRCNNModel(tf.keras.Model):
- """The Mask R-CNN(-RS) and Cascade RCNN-RS models."""
-
- def __init__(self,
- backbone: tf.keras.Model,
- decoder: tf.keras.Model,
- rpn_head: tf.keras.layers.Layer,
- detection_head: Union[tf.keras.layers.Layer,
- List[tf.keras.layers.Layer]],
- roi_generator: tf.keras.layers.Layer,
- roi_sampler: Union[tf.keras.layers.Layer,
- List[tf.keras.layers.Layer]],
- roi_aligner: tf.keras.layers.Layer,
- detection_generator: tf.keras.layers.Layer,
- mask_head: Optional[tf.keras.layers.Layer] = None,
- mask_sampler: Optional[tf.keras.layers.Layer] = None,
- mask_roi_aligner: Optional[tf.keras.layers.Layer] = None,
- class_agnostic_bbox_pred: bool = False,
- cascade_class_ensemble: bool = False,
- min_level: Optional[int] = None,
- max_level: Optional[int] = None,
- num_scales: Optional[int] = None,
- aspect_ratios: Optional[List[float]] = None,
- anchor_size: Optional[float] = None,
- **kwargs):
- """Initializes the R-CNN(-RS) model.
-
- Args:
- backbone: `tf.keras.Model`, the backbone network.
- decoder: `tf.keras.Model`, the decoder network.
- rpn_head: the RPN head.
- detection_head: the detection head or a list of heads.
- roi_generator: the ROI generator.
- roi_sampler: a single ROI sampler or a list of ROI samplers for cascade
- detection heads.
- roi_aligner: the ROI aligner.
- detection_generator: the detection generator.
- mask_head: the mask head.
- mask_sampler: the mask sampler.
- mask_roi_aligner: the ROI alginer for mask prediction.
- class_agnostic_bbox_pred: if True, perform class agnostic bounding box
- prediction. Needs to be `True` for Cascade RCNN models.
- cascade_class_ensemble: if True, ensemble classification scores over all
- detection heads.
- min_level: Minimum level in output feature maps.
- max_level: Maximum level in output feature maps.
- num_scales: A number representing intermediate scales added on each level.
- For instances, num_scales=2 adds one additional intermediate anchor
- scales [2^0, 2^0.5] on each level.
- aspect_ratios: A list representing the aspect raito anchors added on each
- level. The number indicates the ratio of width to height. For instances,
- aspect_ratios=[1.0, 2.0, 0.5] adds three anchors on each scale level.
- anchor_size: A number representing the scale of size of the base anchor to
- the feature stride 2^level.
- **kwargs: keyword arguments to be passed.
- """
- super(MaskRCNNModel, self).__init__(**kwargs)
- self._config_dict = {
- 'backbone': backbone,
- 'decoder': decoder,
- 'rpn_head': rpn_head,
- 'detection_head': detection_head,
- 'roi_generator': roi_generator,
- 'roi_sampler': roi_sampler,
- 'roi_aligner': roi_aligner,
- 'detection_generator': detection_generator,
- 'mask_head': mask_head,
- 'mask_sampler': mask_sampler,
- 'mask_roi_aligner': mask_roi_aligner,
- 'class_agnostic_bbox_pred': class_agnostic_bbox_pred,
- 'cascade_class_ensemble': cascade_class_ensemble,
- 'min_level': min_level,
- 'max_level': max_level,
- 'num_scales': num_scales,
- 'aspect_ratios': aspect_ratios,
- 'anchor_size': anchor_size,
- }
- self.backbone = backbone
- self.decoder = decoder
- self.rpn_head = rpn_head
- if not isinstance(detection_head, (list, tuple)):
- self.detection_head = [detection_head]
- else:
- self.detection_head = detection_head
- self.roi_generator = roi_generator
- if not isinstance(roi_sampler, (list, tuple)):
- self.roi_sampler = [roi_sampler]
- else:
- self.roi_sampler = roi_sampler
- if len(self.roi_sampler) > 1 and not class_agnostic_bbox_pred:
- raise ValueError(
- '`class_agnostic_bbox_pred` needs to be True if multiple detection heads are specified.'
- )
- self.roi_aligner = roi_aligner
- self.detection_generator = detection_generator
- self._include_mask = mask_head is not None
- self.mask_head = mask_head
- if self._include_mask and mask_sampler is None:
- raise ValueError('`mask_sampler` is not provided in Mask R-CNN.')
- self.mask_sampler = mask_sampler
- if self._include_mask and mask_roi_aligner is None:
- raise ValueError('`mask_roi_aligner` is not provided in Mask R-CNN.')
- self.mask_roi_aligner = mask_roi_aligner
- # Weights for the regression losses for each FRCNN layer.
- # TODO(xianzhi): Make the weights configurable.
- self._cascade_layer_to_weights = [
- [10.0, 10.0, 5.0, 5.0],
- [20.0, 20.0, 10.0, 10.0],
- [30.0, 30.0, 15.0, 15.0],
- ]
-
- def call(self,
- images: tf.Tensor,
- image_shape: tf.Tensor,
- anchor_boxes: Optional[Mapping[str, tf.Tensor]] = None,
- gt_boxes: Optional[tf.Tensor] = None,
- gt_classes: Optional[tf.Tensor] = None,
- gt_masks: Optional[tf.Tensor] = None,
- training: Optional[bool] = None) -> Mapping[str, tf.Tensor]:
-
- model_outputs, intermediate_outputs = self._call_box_outputs(
- images=images, image_shape=image_shape, anchor_boxes=anchor_boxes,
- gt_boxes=gt_boxes, gt_classes=gt_classes, training=training)
- if not self._include_mask:
- return model_outputs
-
- model_mask_outputs = self._call_mask_outputs(
- model_box_outputs=model_outputs,
- features=model_outputs['decoder_features'],
- current_rois=intermediate_outputs['current_rois'],
- matched_gt_indices=intermediate_outputs['matched_gt_indices'],
- matched_gt_boxes=intermediate_outputs['matched_gt_boxes'],
- matched_gt_classes=intermediate_outputs['matched_gt_classes'],
- gt_masks=gt_masks,
- training=training)
- model_outputs.update(model_mask_outputs)
- return model_outputs
-
- def _get_backbone_and_decoder_features(self, images):
-
- backbone_features = self.backbone(images)
- if self.decoder:
- features = self.decoder(backbone_features)
- else:
- features = backbone_features
- return backbone_features, features
-
- def _call_box_outputs(
- self, images: tf.Tensor,
- image_shape: tf.Tensor,
- anchor_boxes: Optional[Mapping[str, tf.Tensor]] = None,
- gt_boxes: Optional[tf.Tensor] = None,
- gt_classes: Optional[tf.Tensor] = None,
- training: Optional[bool] = None) -> Tuple[
- Mapping[str, tf.Tensor], Mapping[str, tf.Tensor]]:
- """Implementation of the Faster-RCNN logic for boxes."""
- model_outputs = {}
-
- # Feature extraction.
- (backbone_features,
- decoder_features) = self._get_backbone_and_decoder_features(images)
-
- # Region proposal network.
- rpn_scores, rpn_boxes = self.rpn_head(decoder_features)
-
- model_outputs.update({
- 'backbone_features': backbone_features,
- 'decoder_features': decoder_features,
- 'rpn_boxes': rpn_boxes,
- 'rpn_scores': rpn_scores
- })
-
- # Generate anchor boxes for this batch if not provided.
- if anchor_boxes is None:
- _, image_height, image_width, _ = images.get_shape().as_list()
- anchor_boxes = anchor.Anchor(
- min_level=self._config_dict['min_level'],
- max_level=self._config_dict['max_level'],
- num_scales=self._config_dict['num_scales'],
- aspect_ratios=self._config_dict['aspect_ratios'],
- anchor_size=self._config_dict['anchor_size'],
- image_size=(image_height, image_width)).multilevel_boxes
- for l in anchor_boxes:
- anchor_boxes[l] = tf.tile(
- tf.expand_dims(anchor_boxes[l], axis=0),
- [tf.shape(images)[0], 1, 1, 1])
-
- # Generate RoIs.
- current_rois, _ = self.roi_generator(rpn_boxes, rpn_scores, anchor_boxes,
- image_shape, training)
-
- next_rois = current_rois
- all_class_outputs = []
- for cascade_num in range(len(self.roi_sampler)):
- # In cascade RCNN we want the higher layers to have different regression
- # weights as the predicted deltas become smaller and smaller.
- regression_weights = self._cascade_layer_to_weights[cascade_num]
- current_rois = next_rois
-
- (class_outputs, box_outputs, model_outputs, matched_gt_boxes,
- matched_gt_classes, matched_gt_indices,
- current_rois) = self._run_frcnn_head(
- features=decoder_features,
- rois=current_rois,
- gt_boxes=gt_boxes,
- gt_classes=gt_classes,
- training=training,
- model_outputs=model_outputs,
- cascade_num=cascade_num,
- regression_weights=regression_weights)
- all_class_outputs.append(class_outputs)
-
- # Generate ROIs for the next cascade head if there is any.
- if cascade_num < len(self.roi_sampler) - 1:
- next_rois = box_ops.decode_boxes(
- tf.cast(box_outputs, tf.float32),
- current_rois,
- weights=regression_weights)
- next_rois = box_ops.clip_boxes(next_rois,
- tf.expand_dims(image_shape, axis=1))
-
- if not training:
- if self._config_dict['cascade_class_ensemble']:
- class_outputs = tf.add_n(all_class_outputs) / len(all_class_outputs)
-
- detections = self.detection_generator(
- box_outputs,
- class_outputs,
- current_rois,
- image_shape,
- regression_weights,
- bbox_per_class=(not self._config_dict['class_agnostic_bbox_pred']))
- model_outputs.update({
- 'cls_outputs': class_outputs,
- 'box_outputs': box_outputs,
- })
- if self.detection_generator.get_config()['apply_nms']:
- model_outputs.update({
- 'detection_boxes': detections['detection_boxes'],
- 'detection_scores': detections['detection_scores'],
- 'detection_classes': detections['detection_classes'],
- 'num_detections': detections['num_detections']
- })
- else:
- model_outputs.update({
- 'decoded_boxes': detections['decoded_boxes'],
- 'decoded_box_scores': detections['decoded_box_scores']
- })
-
- intermediate_outputs = {
- 'matched_gt_boxes': matched_gt_boxes,
- 'matched_gt_indices': matched_gt_indices,
- 'matched_gt_classes': matched_gt_classes,
- 'current_rois': current_rois,
- }
- return (model_outputs, intermediate_outputs)
-
- def _call_mask_outputs(
- self,
- model_box_outputs: Mapping[str, tf.Tensor],
- features: tf.Tensor,
- current_rois: tf.Tensor,
- matched_gt_indices: tf.Tensor,
- matched_gt_boxes: tf.Tensor,
- matched_gt_classes: tf.Tensor,
- gt_masks: tf.Tensor,
- training: Optional[bool] = None) -> Mapping[str, tf.Tensor]:
- """Implementation of Mask-RCNN mask prediction logic."""
-
- model_outputs = dict(model_box_outputs)
- if training:
- current_rois, roi_classes, roi_masks = self.mask_sampler(
- current_rois, matched_gt_boxes, matched_gt_classes,
- matched_gt_indices, gt_masks)
- roi_masks = tf.stop_gradient(roi_masks)
-
- model_outputs.update({
- 'mask_class_targets': roi_classes,
- 'mask_targets': roi_masks,
- })
- else:
- current_rois = model_outputs['detection_boxes']
- roi_classes = model_outputs['detection_classes']
-
- mask_logits, mask_probs = self._features_to_mask_outputs(
- features, current_rois, roi_classes)
-
- if training:
- model_outputs.update({
- 'mask_outputs': mask_logits,
- })
- else:
- model_outputs.update({
- 'detection_masks': mask_probs,
- })
- return model_outputs
-
- def _run_frcnn_head(self, features, rois, gt_boxes, gt_classes, training,
- model_outputs, cascade_num, regression_weights):
- """Runs the frcnn head that does both class and box prediction.
-
- Args:
- features: `list` of features from the feature extractor.
- rois: `list` of current rois that will be used to predict bbox refinement
- and classes from.
- gt_boxes: a tensor with a shape of [batch_size, MAX_NUM_INSTANCES, 4].
- This tensor might have paddings with a negative value.
- gt_classes: [batch_size, MAX_INSTANCES] representing the groundtruth box
- classes. It is padded with -1s to indicate the invalid classes.
- training: `bool`, if model is training or being evaluated.
- model_outputs: `dict`, used for storing outputs used for eval and losses.
- cascade_num: `int`, the current frcnn layer in the cascade.
- regression_weights: `list`, weights used for l1 loss in bounding box
- regression.
-
- Returns:
- class_outputs: Class predictions for rois.
- box_outputs: Box predictions for rois. These are formatted for the
- regression loss and need to be converted before being used as rois
- in the next stage.
- model_outputs: Updated dict with predictions used for losses and eval.
- matched_gt_boxes: If `is_training` is true, then these give the gt box
- location of its positive match.
- matched_gt_classes: If `is_training` is true, then these give the gt class
- of the predicted box.
- matched_gt_boxes: If `is_training` is true, then these give the box
- location of its positive match.
- matched_gt_indices: If `is_training` is true, then gives the index of
- the positive box match. Used for mask prediction.
- rois: The sampled rois used for this layer.
- """
- # Only used during training.
- matched_gt_boxes, matched_gt_classes, matched_gt_indices = (None, None,
- None)
- if training and gt_boxes is not None:
- rois = tf.stop_gradient(rois)
-
- current_roi_sampler = self.roi_sampler[cascade_num]
- rois, matched_gt_boxes, matched_gt_classes, matched_gt_indices = (
- current_roi_sampler(rois, gt_boxes, gt_classes))
- # Create bounding box training targets.
- box_targets = box_ops.encode_boxes(
- matched_gt_boxes, rois, weights=regression_weights)
- # If the target is background, the box target is set to all 0s.
- box_targets = tf.where(
- tf.tile(
- tf.expand_dims(tf.equal(matched_gt_classes, 0), axis=-1),
- [1, 1, 4]), tf.zeros_like(box_targets), box_targets)
- model_outputs.update({
- 'class_targets_{}'.format(cascade_num)
- if cascade_num else 'class_targets':
- matched_gt_classes,
- 'box_targets_{}'.format(cascade_num)
- if cascade_num else 'box_targets':
- box_targets,
- })
-
- # Get roi features.
- roi_features = self.roi_aligner(features, rois)
-
- # Run frcnn head to get class and bbox predictions.
- current_detection_head = self.detection_head[cascade_num]
- class_outputs, box_outputs = current_detection_head(roi_features)
-
- model_outputs.update({
- 'class_outputs_{}'.format(cascade_num)
- if cascade_num else 'class_outputs':
- class_outputs,
- 'box_outputs_{}'.format(cascade_num) if cascade_num else 'box_outputs':
- box_outputs,
- })
- return (class_outputs, box_outputs, model_outputs, matched_gt_boxes,
- matched_gt_classes, matched_gt_indices, rois)
-
- def _features_to_mask_outputs(self, features, rois, roi_classes):
- # Mask RoI align.
- mask_roi_features = self.mask_roi_aligner(features, rois)
-
- # Mask head.
- raw_masks = self.mask_head([mask_roi_features, roi_classes])
-
- return raw_masks, tf.nn.sigmoid(raw_masks)
-
- @property
- def checkpoint_items(
- self) -> Mapping[str, Union[tf.keras.Model, tf.keras.layers.Layer]]:
- """Returns a dictionary of items to be additionally checkpointed."""
- items = dict(
- backbone=self.backbone,
- rpn_head=self.rpn_head,
- detection_head=self.detection_head)
- if self.decoder is not None:
- items.update(decoder=self.decoder)
- if self._include_mask:
- items.update(mask_head=self.mask_head)
-
- return items
-
- def get_config(self) -> Mapping[str, Any]:
- return self._config_dict
-
- @classmethod
- def from_config(cls, config):
- return cls(**config)
diff --git a/official/vision/beta/modeling/maskrcnn_model_test.py b/official/vision/beta/modeling/maskrcnn_model_test.py
deleted file mode 100644
index a5b9cece77e47f3c4b61cbec3eee3d677e92db8f..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/maskrcnn_model_test.py
+++ /dev/null
@@ -1,398 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for maskrcnn_model.py."""
-
-import os
-# Import libraries
-from absl.testing import parameterized
-import numpy as np
-import tensorflow as tf
-
-from tensorflow.python.distribute import combinations
-from tensorflow.python.distribute import strategy_combinations
-from official.vision.beta.modeling import maskrcnn_model
-from official.vision.beta.modeling.backbones import resnet
-from official.vision.beta.modeling.decoders import fpn
-from official.vision.beta.modeling.heads import dense_prediction_heads
-from official.vision.beta.modeling.heads import instance_heads
-from official.vision.beta.modeling.layers import detection_generator
-from official.vision.beta.modeling.layers import mask_sampler
-from official.vision.beta.modeling.layers import roi_aligner
-from official.vision.beta.modeling.layers import roi_generator
-from official.vision.beta.modeling.layers import roi_sampler
-from official.vision.beta.ops import anchor
-
-
-class MaskRCNNModelTest(parameterized.TestCase, tf.test.TestCase):
-
- @combinations.generate(
- combinations.combine(
- include_mask=[True, False],
- use_separable_conv=[True, False],
- build_anchor_boxes=[True, False],
- is_training=[True, False]))
- def test_build_model(self, include_mask, use_separable_conv,
- build_anchor_boxes, is_training):
- num_classes = 3
- min_level = 3
- max_level = 7
- num_scales = 3
- aspect_ratios = [1.0]
- anchor_size = 3
- resnet_model_id = 50
- num_anchors_per_location = num_scales * len(aspect_ratios)
- image_size = 384
- images = np.random.rand(2, image_size, image_size, 3)
- image_shape = np.array([[image_size, image_size], [image_size, image_size]])
-
- if build_anchor_boxes:
- anchor_boxes = anchor.Anchor(
- min_level=min_level,
- max_level=max_level,
- num_scales=num_scales,
- aspect_ratios=aspect_ratios,
- anchor_size=3,
- image_size=(image_size, image_size)).multilevel_boxes
- for l in anchor_boxes:
- anchor_boxes[l] = tf.tile(
- tf.expand_dims(anchor_boxes[l], axis=0), [2, 1, 1, 1])
- else:
- anchor_boxes = None
-
- backbone = resnet.ResNet(model_id=resnet_model_id)
- decoder = fpn.FPN(
- input_specs=backbone.output_specs,
- min_level=min_level,
- max_level=max_level,
- use_separable_conv=use_separable_conv)
- rpn_head = dense_prediction_heads.RPNHead(
- min_level=min_level,
- max_level=max_level,
- num_anchors_per_location=num_anchors_per_location,
- num_convs=1)
- detection_head = instance_heads.DetectionHead(num_classes=num_classes)
- roi_generator_obj = roi_generator.MultilevelROIGenerator()
- roi_sampler_obj = roi_sampler.ROISampler()
- roi_aligner_obj = roi_aligner.MultilevelROIAligner()
- detection_generator_obj = detection_generator.DetectionGenerator()
- if include_mask:
- mask_head = instance_heads.MaskHead(
- num_classes=num_classes, upsample_factor=2)
- mask_sampler_obj = mask_sampler.MaskSampler(
- mask_target_size=28, num_sampled_masks=1)
- mask_roi_aligner_obj = roi_aligner.MultilevelROIAligner(crop_size=14)
- else:
- mask_head = None
- mask_sampler_obj = None
- mask_roi_aligner_obj = None
- model = maskrcnn_model.MaskRCNNModel(
- backbone,
- decoder,
- rpn_head,
- detection_head,
- roi_generator_obj,
- roi_sampler_obj,
- roi_aligner_obj,
- detection_generator_obj,
- mask_head,
- mask_sampler_obj,
- mask_roi_aligner_obj,
- min_level=min_level,
- max_level=max_level,
- num_scales=num_scales,
- aspect_ratios=aspect_ratios,
- anchor_size=anchor_size)
-
- gt_boxes = np.array(
- [[[10, 10, 15, 15], [2.5, 2.5, 7.5, 7.5], [-1, -1, -1, -1]],
- [[100, 100, 150, 150], [-1, -1, -1, -1], [-1, -1, -1, -1]]],
- dtype=np.float32)
- gt_classes = np.array([[2, 1, -1], [1, -1, -1]], dtype=np.int32)
- if include_mask:
- gt_masks = np.ones((2, 3, 100, 100))
- else:
- gt_masks = None
-
- # Results will be checked in test_forward.
- _ = model(
- images,
- image_shape,
- anchor_boxes,
- gt_boxes,
- gt_classes,
- gt_masks,
- training=is_training)
-
- @combinations.generate(
- combinations.combine(
- strategy=[
- strategy_combinations.cloud_tpu_strategy,
- strategy_combinations.one_device_strategy_gpu,
- ],
- include_mask=[True, False],
- build_anchor_boxes=[True, False],
- use_cascade_heads=[True, False],
- training=[True, False],
- ))
- def test_forward(self, strategy, include_mask, build_anchor_boxes, training,
- use_cascade_heads):
- num_classes = 3
- min_level = 3
- max_level = 4
- num_scales = 3
- aspect_ratios = [1.0]
- anchor_size = 3
- if use_cascade_heads:
- cascade_iou_thresholds = [0.6]
- class_agnostic_bbox_pred = True
- cascade_class_ensemble = True
- else:
- cascade_iou_thresholds = None
- class_agnostic_bbox_pred = False
- cascade_class_ensemble = False
-
- image_size = (256, 256)
- images = np.random.rand(2, image_size[0], image_size[1], 3)
- image_shape = np.array([[224, 100], [100, 224]])
- with strategy.scope():
- if build_anchor_boxes:
- anchor_boxes = anchor.Anchor(
- min_level=min_level,
- max_level=max_level,
- num_scales=num_scales,
- aspect_ratios=aspect_ratios,
- anchor_size=anchor_size,
- image_size=image_size).multilevel_boxes
- else:
- anchor_boxes = None
- num_anchors_per_location = len(aspect_ratios) * num_scales
-
- input_specs = tf.keras.layers.InputSpec(shape=[None, None, None, 3])
- backbone = resnet.ResNet(model_id=50, input_specs=input_specs)
- decoder = fpn.FPN(
- min_level=min_level,
- max_level=max_level,
- input_specs=backbone.output_specs)
- rpn_head = dense_prediction_heads.RPNHead(
- min_level=min_level,
- max_level=max_level,
- num_anchors_per_location=num_anchors_per_location)
- detection_head = instance_heads.DetectionHead(
- num_classes=num_classes,
- class_agnostic_bbox_pred=class_agnostic_bbox_pred)
- roi_generator_obj = roi_generator.MultilevelROIGenerator()
-
- roi_sampler_cascade = []
- roi_sampler_obj = roi_sampler.ROISampler()
- roi_sampler_cascade.append(roi_sampler_obj)
- if cascade_iou_thresholds:
- for iou in cascade_iou_thresholds:
- roi_sampler_obj = roi_sampler.ROISampler(
- mix_gt_boxes=False,
- foreground_iou_threshold=iou,
- background_iou_high_threshold=iou,
- background_iou_low_threshold=0.0,
- skip_subsampling=True)
- roi_sampler_cascade.append(roi_sampler_obj)
- roi_aligner_obj = roi_aligner.MultilevelROIAligner()
- detection_generator_obj = detection_generator.DetectionGenerator()
- if include_mask:
- mask_head = instance_heads.MaskHead(
- num_classes=num_classes, upsample_factor=2)
- mask_sampler_obj = mask_sampler.MaskSampler(
- mask_target_size=28, num_sampled_masks=1)
- mask_roi_aligner_obj = roi_aligner.MultilevelROIAligner(crop_size=14)
- else:
- mask_head = None
- mask_sampler_obj = None
- mask_roi_aligner_obj = None
- model = maskrcnn_model.MaskRCNNModel(
- backbone,
- decoder,
- rpn_head,
- detection_head,
- roi_generator_obj,
- roi_sampler_obj,
- roi_aligner_obj,
- detection_generator_obj,
- mask_head,
- mask_sampler_obj,
- mask_roi_aligner_obj,
- class_agnostic_bbox_pred=class_agnostic_bbox_pred,
- cascade_class_ensemble=cascade_class_ensemble,
- min_level=min_level,
- max_level=max_level,
- num_scales=num_scales,
- aspect_ratios=aspect_ratios,
- anchor_size=anchor_size)
-
- gt_boxes = np.array(
- [[[10, 10, 15, 15], [2.5, 2.5, 7.5, 7.5], [-1, -1, -1, -1]],
- [[100, 100, 150, 150], [-1, -1, -1, -1], [-1, -1, -1, -1]]],
- dtype=np.float32)
- gt_classes = np.array([[2, 1, -1], [1, -1, -1]], dtype=np.int32)
- if include_mask:
- gt_masks = np.ones((2, 3, 100, 100))
- else:
- gt_masks = None
-
- results = model(
- images,
- image_shape,
- anchor_boxes,
- gt_boxes,
- gt_classes,
- gt_masks,
- training=training)
-
- self.assertIn('rpn_boxes', results)
- self.assertIn('rpn_scores', results)
- if training:
- self.assertIn('class_targets', results)
- self.assertIn('box_targets', results)
- self.assertIn('class_outputs', results)
- self.assertIn('box_outputs', results)
- if include_mask:
- self.assertIn('mask_outputs', results)
- else:
- self.assertIn('detection_boxes', results)
- self.assertIn('detection_scores', results)
- self.assertIn('detection_classes', results)
- self.assertIn('num_detections', results)
- if include_mask:
- self.assertIn('detection_masks', results)
-
- @parameterized.parameters(
- (False,),
- (True,),
- )
- def test_serialize_deserialize(self, include_mask):
- input_specs = tf.keras.layers.InputSpec(shape=[None, None, None, 3])
- backbone = resnet.ResNet(model_id=50, input_specs=input_specs)
- decoder = fpn.FPN(
- min_level=3, max_level=7, input_specs=backbone.output_specs)
- rpn_head = dense_prediction_heads.RPNHead(
- min_level=3, max_level=7, num_anchors_per_location=3)
- detection_head = instance_heads.DetectionHead(num_classes=2)
- roi_generator_obj = roi_generator.MultilevelROIGenerator()
- roi_sampler_obj = roi_sampler.ROISampler()
- roi_aligner_obj = roi_aligner.MultilevelROIAligner()
- detection_generator_obj = detection_generator.DetectionGenerator()
- if include_mask:
- mask_head = instance_heads.MaskHead(num_classes=2, upsample_factor=2)
- mask_sampler_obj = mask_sampler.MaskSampler(
- mask_target_size=28, num_sampled_masks=1)
- mask_roi_aligner_obj = roi_aligner.MultilevelROIAligner(crop_size=14)
- else:
- mask_head = None
- mask_sampler_obj = None
- mask_roi_aligner_obj = None
- model = maskrcnn_model.MaskRCNNModel(
- backbone,
- decoder,
- rpn_head,
- detection_head,
- roi_generator_obj,
- roi_sampler_obj,
- roi_aligner_obj,
- detection_generator_obj,
- mask_head,
- mask_sampler_obj,
- mask_roi_aligner_obj,
- min_level=3,
- max_level=7,
- num_scales=3,
- aspect_ratios=[1.0],
- anchor_size=3)
-
- config = model.get_config()
- new_model = maskrcnn_model.MaskRCNNModel.from_config(config)
-
- # Validate that the config can be forced to JSON.
- _ = new_model.to_json()
-
- # If the serialization was successful, the new config should match the old.
- self.assertAllEqual(model.get_config(), new_model.get_config())
-
- @parameterized.parameters(
- (False,),
- (True,),
- )
- def test_checkpoint(self, include_mask):
- input_specs = tf.keras.layers.InputSpec(shape=[None, None, None, 3])
- backbone = resnet.ResNet(model_id=50, input_specs=input_specs)
- decoder = fpn.FPN(
- min_level=3, max_level=7, input_specs=backbone.output_specs)
- rpn_head = dense_prediction_heads.RPNHead(
- min_level=3, max_level=7, num_anchors_per_location=3)
- detection_head = instance_heads.DetectionHead(num_classes=2)
- roi_generator_obj = roi_generator.MultilevelROIGenerator()
- roi_sampler_obj = roi_sampler.ROISampler()
- roi_aligner_obj = roi_aligner.MultilevelROIAligner()
- detection_generator_obj = detection_generator.DetectionGenerator()
- if include_mask:
- mask_head = instance_heads.MaskHead(num_classes=2, upsample_factor=2)
- mask_sampler_obj = mask_sampler.MaskSampler(
- mask_target_size=28, num_sampled_masks=1)
- mask_roi_aligner_obj = roi_aligner.MultilevelROIAligner(crop_size=14)
- else:
- mask_head = None
- mask_sampler_obj = None
- mask_roi_aligner_obj = None
- model = maskrcnn_model.MaskRCNNModel(
- backbone,
- decoder,
- rpn_head,
- detection_head,
- roi_generator_obj,
- roi_sampler_obj,
- roi_aligner_obj,
- detection_generator_obj,
- mask_head,
- mask_sampler_obj,
- mask_roi_aligner_obj,
- min_level=3,
- max_level=7,
- num_scales=3,
- aspect_ratios=[1.0],
- anchor_size=3)
- expect_checkpoint_items = dict(
- backbone=backbone,
- decoder=decoder,
- rpn_head=rpn_head,
- detection_head=[detection_head])
- if include_mask:
- expect_checkpoint_items['mask_head'] = mask_head
- self.assertAllEqual(expect_checkpoint_items, model.checkpoint_items)
-
- # Test save and load checkpoints.
- ckpt = tf.train.Checkpoint(model=model, **model.checkpoint_items)
- save_dir = self.create_tempdir().full_path
- ckpt.save(os.path.join(save_dir, 'ckpt'))
-
- partial_ckpt = tf.train.Checkpoint(backbone=backbone)
- partial_ckpt.read(tf.train.latest_checkpoint(
- save_dir)).expect_partial().assert_existing_objects_matched()
-
- if include_mask:
- partial_ckpt_mask = tf.train.Checkpoint(
- backbone=backbone, mask_head=mask_head)
- partial_ckpt_mask.restore(tf.train.latest_checkpoint(
- save_dir)).expect_partial().assert_existing_objects_matched()
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/retinanet_model.py b/official/vision/beta/modeling/retinanet_model.py
deleted file mode 100644
index 49de9c65badc7c4f3048a57d1e6d409f1fa60fe3..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/retinanet_model.py
+++ /dev/null
@@ -1,216 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""RetinaNet."""
-from typing import Any, Mapping, List, Optional, Union
-
-# Import libraries
-import tensorflow as tf
-
-from official.vision.beta.ops import anchor
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class RetinaNetModel(tf.keras.Model):
- """The RetinaNet model class."""
-
- def __init__(self,
- backbone: tf.keras.Model,
- decoder: tf.keras.Model,
- head: tf.keras.layers.Layer,
- detection_generator: tf.keras.layers.Layer,
- min_level: Optional[int] = None,
- max_level: Optional[int] = None,
- num_scales: Optional[int] = None,
- aspect_ratios: Optional[List[float]] = None,
- anchor_size: Optional[float] = None,
- **kwargs):
- """Classification initialization function.
-
- Args:
- backbone: `tf.keras.Model` a backbone network.
- decoder: `tf.keras.Model` a decoder network.
- head: `RetinaNetHead`, the RetinaNet head.
- detection_generator: the detection generator.
- min_level: Minimum level in output feature maps.
- max_level: Maximum level in output feature maps.
- num_scales: A number representing intermediate scales added
- on each level. For instances, num_scales=2 adds one additional
- intermediate anchor scales [2^0, 2^0.5] on each level.
- aspect_ratios: A list representing the aspect raito
- anchors added on each level. The number indicates the ratio of width to
- height. For instances, aspect_ratios=[1.0, 2.0, 0.5] adds three anchors
- on each scale level.
- anchor_size: A number representing the scale of size of the base
- anchor to the feature stride 2^level.
- **kwargs: keyword arguments to be passed.
- """
- super(RetinaNetModel, self).__init__(**kwargs)
- self._config_dict = {
- 'backbone': backbone,
- 'decoder': decoder,
- 'head': head,
- 'detection_generator': detection_generator,
- 'min_level': min_level,
- 'max_level': max_level,
- 'num_scales': num_scales,
- 'aspect_ratios': aspect_ratios,
- 'anchor_size': anchor_size,
- }
- self._backbone = backbone
- self._decoder = decoder
- self._head = head
- self._detection_generator = detection_generator
-
- def call(self,
- images: tf.Tensor,
- image_shape: Optional[tf.Tensor] = None,
- anchor_boxes: Optional[Mapping[str, tf.Tensor]] = None,
- output_intermediate_features: bool = False,
- training: bool = None) -> Mapping[str, tf.Tensor]:
- """Forward pass of the RetinaNet model.
-
- Args:
- images: `Tensor`, the input batched images, whose shape is
- [batch, height, width, 3].
- image_shape: `Tensor`, the actual shape of the input images, whose shape
- is [batch, 2] where the last dimension is [height, width]. Note that
- this is the actual image shape excluding paddings. For example, images
- in the batch may be resized into different shapes before padding to the
- fixed size.
- anchor_boxes: a dict of tensors which includes multilevel anchors.
- - key: `str`, the level of the multilevel predictions.
- - values: `Tensor`, the anchor coordinates of a particular feature
- level, whose shape is [height_l, width_l, num_anchors_per_location].
- output_intermediate_features: `bool` indicating whether to return the
- intermediate feature maps generated by backbone and decoder.
- training: `bool`, indicating whether it is in training mode.
-
- Returns:
- scores: a dict of tensors which includes scores of the predictions.
- - key: `str`, the level of the multilevel predictions.
- - values: `Tensor`, the box scores predicted from a particular feature
- level, whose shape is
- [batch, height_l, width_l, num_classes * num_anchors_per_location].
- boxes: a dict of tensors which includes coordinates of the predictions.
- - key: `str`, the level of the multilevel predictions.
- - values: `Tensor`, the box coordinates predicted from a particular
- feature level, whose shape is
- [batch, height_l, width_l, 4 * num_anchors_per_location].
- attributes: a dict of (attribute_name, attribute_predictions). Each
- attribute prediction is a dict that includes:
- - key: `str`, the level of the multilevel predictions.
- - values: `Tensor`, the attribute predictions from a particular
- feature level, whose shape is
- [batch, height_l, width_l, att_size * num_anchors_per_location].
- """
- outputs = {}
- # Feature extraction.
- features = self.backbone(images)
- if output_intermediate_features:
- outputs.update(
- {'backbone_{}'.format(k): v for k, v in features.items()})
- if self.decoder:
- features = self.decoder(features)
- if output_intermediate_features:
- outputs.update(
- {'decoder_{}'.format(k): v for k, v in features.items()})
-
- # Dense prediction. `raw_attributes` can be empty.
- raw_scores, raw_boxes, raw_attributes = self.head(features)
-
- if training:
- outputs.update({
- 'cls_outputs': raw_scores,
- 'box_outputs': raw_boxes,
- })
- if raw_attributes:
- outputs.update({'attribute_outputs': raw_attributes})
- return outputs
- else:
- # Generate anchor boxes for this batch if not provided.
- if anchor_boxes is None:
- _, image_height, image_width, _ = images.get_shape().as_list()
- anchor_boxes = anchor.Anchor(
- min_level=self._config_dict['min_level'],
- max_level=self._config_dict['max_level'],
- num_scales=self._config_dict['num_scales'],
- aspect_ratios=self._config_dict['aspect_ratios'],
- anchor_size=self._config_dict['anchor_size'],
- image_size=(image_height, image_width)).multilevel_boxes
- for l in anchor_boxes:
- anchor_boxes[l] = tf.tile(
- tf.expand_dims(anchor_boxes[l], axis=0),
- [tf.shape(images)[0], 1, 1, 1])
-
- # Post-processing.
- final_results = self.detection_generator(raw_boxes, raw_scores,
- anchor_boxes, image_shape,
- raw_attributes)
- outputs.update({
- 'cls_outputs': raw_scores,
- 'box_outputs': raw_boxes,
- })
- if self.detection_generator.get_config()['apply_nms']:
- outputs.update({
- 'detection_boxes': final_results['detection_boxes'],
- 'detection_scores': final_results['detection_scores'],
- 'detection_classes': final_results['detection_classes'],
- 'num_detections': final_results['num_detections']
- })
- else:
- outputs.update({
- 'decoded_boxes': final_results['decoded_boxes'],
- 'decoded_box_scores': final_results['decoded_box_scores']
- })
-
- if raw_attributes:
- outputs.update({
- 'attribute_outputs': raw_attributes,
- 'detection_attributes': final_results['detection_attributes'],
- })
- return outputs
-
- @property
- def checkpoint_items(
- self) -> Mapping[str, Union[tf.keras.Model, tf.keras.layers.Layer]]:
- """Returns a dictionary of items to be additionally checkpointed."""
- items = dict(backbone=self.backbone, head=self.head)
- if self.decoder is not None:
- items.update(decoder=self.decoder)
-
- return items
-
- @property
- def backbone(self) -> tf.keras.Model:
- return self._backbone
-
- @property
- def decoder(self) -> tf.keras.Model:
- return self._decoder
-
- @property
- def head(self) -> tf.keras.layers.Layer:
- return self._head
-
- @property
- def detection_generator(self) -> tf.keras.layers.Layer:
- return self._detection_generator
-
- def get_config(self) -> Mapping[str, Any]:
- return self._config_dict
-
- @classmethod
- def from_config(cls, config):
- return cls(**config)
diff --git a/official/vision/beta/modeling/retinanet_model_test.py b/official/vision/beta/modeling/retinanet_model_test.py
deleted file mode 100644
index d4f3b70db2792e8f1ad21b9cb9f3e8c74ebb7f10..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/retinanet_model_test.py
+++ /dev/null
@@ -1,314 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for RetinaNet models."""
-
-# Import libraries
-from absl.testing import parameterized
-import numpy as np
-import tensorflow as tf
-
-from tensorflow.python.distribute import combinations
-from tensorflow.python.distribute import strategy_combinations
-from official.vision.beta.modeling import retinanet_model
-from official.vision.beta.modeling.backbones import resnet
-from official.vision.beta.modeling.decoders import fpn
-from official.vision.beta.modeling.heads import dense_prediction_heads
-from official.vision.beta.modeling.layers import detection_generator
-from official.vision.beta.ops import anchor
-
-
-class RetinaNetTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- {
- 'use_separable_conv': True,
- 'build_anchor_boxes': True,
- 'is_training': False,
- 'has_att_heads': False
- },
- {
- 'use_separable_conv': False,
- 'build_anchor_boxes': True,
- 'is_training': False,
- 'has_att_heads': False
- },
- {
- 'use_separable_conv': False,
- 'build_anchor_boxes': False,
- 'is_training': False,
- 'has_att_heads': False
- },
- {
- 'use_separable_conv': False,
- 'build_anchor_boxes': False,
- 'is_training': True,
- 'has_att_heads': False
- },
- {
- 'use_separable_conv': False,
- 'build_anchor_boxes': True,
- 'is_training': True,
- 'has_att_heads': True
- },
- {
- 'use_separable_conv': False,
- 'build_anchor_boxes': True,
- 'is_training': False,
- 'has_att_heads': True
- },
- )
- def test_build_model(self, use_separable_conv, build_anchor_boxes,
- is_training, has_att_heads):
- num_classes = 3
- min_level = 3
- max_level = 7
- num_scales = 3
- aspect_ratios = [1.0]
- anchor_size = 3
- fpn_num_filters = 256
- head_num_convs = 4
- head_num_filters = 256
- num_anchors_per_location = num_scales * len(aspect_ratios)
- image_size = 384
- images = np.random.rand(2, image_size, image_size, 3)
- image_shape = np.array([[image_size, image_size], [image_size, image_size]])
-
- if build_anchor_boxes:
- anchor_boxes = anchor.Anchor(
- min_level=min_level,
- max_level=max_level,
- num_scales=num_scales,
- aspect_ratios=aspect_ratios,
- anchor_size=anchor_size,
- image_size=(image_size, image_size)).multilevel_boxes
- for l in anchor_boxes:
- anchor_boxes[l] = tf.tile(
- tf.expand_dims(anchor_boxes[l], axis=0), [2, 1, 1, 1])
- else:
- anchor_boxes = None
-
- if has_att_heads:
- attribute_heads = [dict(name='depth', type='regression', size=1)]
- else:
- attribute_heads = None
-
- backbone = resnet.ResNet(model_id=50)
- decoder = fpn.FPN(
- input_specs=backbone.output_specs,
- min_level=min_level,
- max_level=max_level,
- num_filters=fpn_num_filters,
- use_separable_conv=use_separable_conv)
- head = dense_prediction_heads.RetinaNetHead(
- min_level=min_level,
- max_level=max_level,
- num_classes=num_classes,
- attribute_heads=attribute_heads,
- num_anchors_per_location=num_anchors_per_location,
- use_separable_conv=use_separable_conv,
- num_convs=head_num_convs,
- num_filters=head_num_filters)
- generator = detection_generator.MultilevelDetectionGenerator(
- max_num_detections=10)
- model = retinanet_model.RetinaNetModel(
- backbone=backbone,
- decoder=decoder,
- head=head,
- detection_generator=generator,
- min_level=min_level,
- max_level=max_level,
- num_scales=num_scales,
- aspect_ratios=aspect_ratios,
- anchor_size=anchor_size)
-
- _ = model(images, image_shape, anchor_boxes, training=is_training)
-
- @combinations.generate(
- combinations.combine(
- strategy=[
- strategy_combinations.cloud_tpu_strategy,
- strategy_combinations.one_device_strategy_gpu,
- ],
- image_size=[
- (128, 128),
- ],
- training=[True, False],
- has_att_heads=[True, False],
- output_intermediate_features=[True, False],
- soft_nms_sigma=[None, 0.0, 0.1],
- ))
- def test_forward(self, strategy, image_size, training, has_att_heads,
- output_intermediate_features, soft_nms_sigma):
- """Test for creation of a R50-FPN RetinaNet."""
- tf.keras.backend.set_image_data_format('channels_last')
- num_classes = 3
- min_level = 3
- max_level = 7
- num_scales = 3
- aspect_ratios = [1.0]
- num_anchors_per_location = num_scales * len(aspect_ratios)
-
- images = np.random.rand(2, image_size[0], image_size[1], 3)
- image_shape = np.array(
- [[image_size[0], image_size[1]], [image_size[0], image_size[1]]])
-
- with strategy.scope():
- anchor_gen = anchor.build_anchor_generator(
- min_level=min_level,
- max_level=max_level,
- num_scales=num_scales,
- aspect_ratios=aspect_ratios,
- anchor_size=3)
- anchor_boxes = anchor_gen(image_size)
- for l in anchor_boxes:
- anchor_boxes[l] = tf.tile(
- tf.expand_dims(anchor_boxes[l], axis=0), [2, 1, 1, 1])
-
- backbone = resnet.ResNet(model_id=50)
- decoder = fpn.FPN(
- input_specs=backbone.output_specs,
- min_level=min_level,
- max_level=max_level)
-
- if has_att_heads:
- attribute_heads = [dict(name='depth', type='regression', size=1)]
- else:
- attribute_heads = None
- head = dense_prediction_heads.RetinaNetHead(
- min_level=min_level,
- max_level=max_level,
- num_classes=num_classes,
- attribute_heads=attribute_heads,
- num_anchors_per_location=num_anchors_per_location)
- generator = detection_generator.MultilevelDetectionGenerator(
- max_num_detections=10,
- nms_version='v1',
- use_cpu_nms=soft_nms_sigma is not None,
- soft_nms_sigma=soft_nms_sigma)
- model = retinanet_model.RetinaNetModel(
- backbone=backbone,
- decoder=decoder,
- head=head,
- detection_generator=generator)
-
- model_outputs = model(
- images,
- image_shape,
- anchor_boxes,
- output_intermediate_features=output_intermediate_features,
- training=training)
-
- if training:
- cls_outputs = model_outputs['cls_outputs']
- box_outputs = model_outputs['box_outputs']
- for level in range(min_level, max_level + 1):
- self.assertIn(str(level), cls_outputs)
- self.assertIn(str(level), box_outputs)
- self.assertAllEqual([
- 2,
- image_size[0] // 2**level,
- image_size[1] // 2**level,
- num_classes * num_anchors_per_location
- ], cls_outputs[str(level)].numpy().shape)
- self.assertAllEqual([
- 2,
- image_size[0] // 2**level,
- image_size[1] // 2**level,
- 4 * num_anchors_per_location
- ], box_outputs[str(level)].numpy().shape)
- if has_att_heads:
- att_outputs = model_outputs['attribute_outputs']
- for att in att_outputs.values():
- self.assertAllEqual([
- 2, image_size[0] // 2**level, image_size[1] // 2**level,
- 1 * num_anchors_per_location
- ], att[str(level)].numpy().shape)
- else:
- self.assertIn('detection_boxes', model_outputs)
- self.assertIn('detection_scores', model_outputs)
- self.assertIn('detection_classes', model_outputs)
- self.assertIn('num_detections', model_outputs)
- self.assertAllEqual(
- [2, 10, 4], model_outputs['detection_boxes'].numpy().shape)
- self.assertAllEqual(
- [2, 10], model_outputs['detection_scores'].numpy().shape)
- self.assertAllEqual(
- [2, 10], model_outputs['detection_classes'].numpy().shape)
- self.assertAllEqual(
- [2,], model_outputs['num_detections'].numpy().shape)
- if has_att_heads:
- self.assertIn('detection_attributes', model_outputs)
- self.assertAllEqual(
- [2, 10, 1],
- model_outputs['detection_attributes']['depth'].numpy().shape)
- if output_intermediate_features:
- for l in range(2, 6):
- self.assertIn('backbone_{}'.format(l), model_outputs)
- self.assertAllEqual([
- 2, image_size[0] // 2**l, image_size[1] // 2**l,
- backbone.output_specs[str(l)].as_list()[-1]
- ], model_outputs['backbone_{}'.format(l)].numpy().shape)
- for l in range(min_level, max_level + 1):
- self.assertIn('decoder_{}'.format(l), model_outputs)
- self.assertAllEqual([
- 2, image_size[0] // 2**l, image_size[1] // 2**l,
- decoder.output_specs[str(l)].as_list()[-1]
- ], model_outputs['decoder_{}'.format(l)].numpy().shape)
-
- def test_serialize_deserialize(self):
- """Validate the network can be serialized and deserialized."""
- num_classes = 3
- min_level = 3
- max_level = 7
- num_scales = 3
- aspect_ratios = [1.0]
- num_anchors_per_location = num_scales * len(aspect_ratios)
-
- backbone = resnet.ResNet(model_id=50)
- decoder = fpn.FPN(
- input_specs=backbone.output_specs,
- min_level=min_level,
- max_level=max_level)
- head = dense_prediction_heads.RetinaNetHead(
- min_level=min_level,
- max_level=max_level,
- num_classes=num_classes,
- num_anchors_per_location=num_anchors_per_location)
- generator = detection_generator.MultilevelDetectionGenerator(
- max_num_detections=10)
- model = retinanet_model.RetinaNetModel(
- backbone=backbone,
- decoder=decoder,
- head=head,
- detection_generator=generator,
- min_level=min_level,
- max_level=max_level,
- num_scales=num_scales,
- aspect_ratios=aspect_ratios,
- anchor_size=3)
-
- config = model.get_config()
- new_model = retinanet_model.RetinaNetModel.from_config(config)
-
- # Validate that the config can be forced to JSON.
- _ = new_model.to_json()
-
- # If the serialization was successful, the new config should match the old.
- self.assertAllEqual(model.get_config(), new_model.get_config())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/segmentation_model.py b/official/vision/beta/modeling/segmentation_model.py
deleted file mode 100644
index 0f213df5b47edfcf4fc74906509ae838314b9b20..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/segmentation_model.py
+++ /dev/null
@@ -1,94 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Build segmentation models."""
-from typing import Any, Mapping, Union, Optional, Dict
-
-# Import libraries
-import tensorflow as tf
-
-layers = tf.keras.layers
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class SegmentationModel(tf.keras.Model):
- """A Segmentation class model.
-
- Input images are passed through backbone first. Decoder network is then
- applied, and finally, segmentation head is applied on the output of the
- decoder network. Layers such as ASPP should be part of decoder. Any feature
- fusion is done as part of the segmentation head (i.e. deeplabv3+ feature
- fusion is not part of the decoder, instead it is part of the segmentation
- head). This way, different feature fusion techniques can be combined with
- different backbones, and decoders.
- """
-
- def __init__(self, backbone: tf.keras.Model, decoder: tf.keras.Model,
- head: tf.keras.layers.Layer,
- mask_scoring_head: Optional[tf.keras.layers.Layer] = None,
- **kwargs):
- """Segmentation initialization function.
-
- Args:
- backbone: a backbone network.
- decoder: a decoder network. E.g. FPN.
- head: segmentation head.
- mask_scoring_head: mask scoring head.
- **kwargs: keyword arguments to be passed.
- """
- super(SegmentationModel, self).__init__(**kwargs)
- self._config_dict = {
- 'backbone': backbone,
- 'decoder': decoder,
- 'head': head,
- 'mask_scoring_head': mask_scoring_head,
- }
- self.backbone = backbone
- self.decoder = decoder
- self.head = head
- self.mask_scoring_head = mask_scoring_head
-
- def call(self, inputs: tf.Tensor, training: bool = None
- ) -> Dict[str, tf.Tensor]:
- backbone_features = self.backbone(inputs)
-
- if self.decoder:
- decoder_features = self.decoder(backbone_features)
- else:
- decoder_features = backbone_features
-
- logits = self.head((backbone_features, decoder_features))
- outputs = {'logits': logits}
- if self.mask_scoring_head:
- mask_scores = self.mask_scoring_head(logits)
- outputs.update({'mask_scores': mask_scores})
- return outputs
-
- @property
- def checkpoint_items(
- self) -> Mapping[str, Union[tf.keras.Model, tf.keras.layers.Layer]]:
- """Returns a dictionary of items to be additionally checkpointed."""
- items = dict(backbone=self.backbone, head=self.head)
- if self.decoder is not None:
- items.update(decoder=self.decoder)
- if self.mask_scoring_head is not None:
- items.update(mask_scoring_head=self.mask_scoring_head)
- return items
-
- def get_config(self) -> Mapping[str, Any]:
- return self._config_dict
-
- @classmethod
- def from_config(cls, config, custom_objects=None):
- return cls(**config)
diff --git a/official/vision/beta/modeling/segmentation_model_test.py b/official/vision/beta/modeling/segmentation_model_test.py
deleted file mode 100644
index e2a24c2c8b7348d9e01a41d3fe5b4b8c59cafab5..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/segmentation_model_test.py
+++ /dev/null
@@ -1,86 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for segmentation network."""
-
-from absl.testing import parameterized
-import numpy as np
-import tensorflow as tf
-
-from official.vision.beta.modeling import backbones
-from official.vision.beta.modeling import segmentation_model
-from official.vision.beta.modeling.decoders import fpn
-from official.vision.beta.modeling.heads import segmentation_heads
-
-
-class SegmentationNetworkTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (128, 2),
- (128, 3),
- (128, 4),
- (256, 2),
- (256, 3),
- (256, 4),
- )
- def test_segmentation_network_creation(
- self, input_size, level):
- """Test for creation of a segmentation network."""
- num_classes = 10
- inputs = np.random.rand(2, input_size, input_size, 3)
- tf.keras.backend.set_image_data_format('channels_last')
- backbone = backbones.ResNet(model_id=50)
-
- decoder = fpn.FPN(
- input_specs=backbone.output_specs, min_level=2, max_level=7)
- head = segmentation_heads.SegmentationHead(num_classes, level=level)
-
- model = segmentation_model.SegmentationModel(
- backbone=backbone,
- decoder=decoder,
- head=head,
- mask_scoring_head=None,
- )
-
- outputs = model(inputs)
- self.assertAllEqual(
- [2, input_size // (2**level), input_size // (2**level), num_classes],
- outputs['logits'].numpy().shape)
-
- def test_serialize_deserialize(self):
- """Validate the network can be serialized and deserialized."""
- num_classes = 3
- backbone = backbones.ResNet(model_id=50)
- decoder = fpn.FPN(
- input_specs=backbone.output_specs, min_level=3, max_level=7)
- head = segmentation_heads.SegmentationHead(num_classes, level=3)
- model = segmentation_model.SegmentationModel(
- backbone=backbone,
- decoder=decoder,
- head=head
- )
-
- config = model.get_config()
- new_model = segmentation_model.SegmentationModel.from_config(config)
-
- # Validate that the config can be forced to JSON.
- _ = new_model.to_json()
-
- # If the serialization was successful, the new config should match the old.
- self.assertAllEqual(model.get_config(), new_model.get_config())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/modeling/video_classification_model.py b/official/vision/beta/modeling/video_classification_model.py
deleted file mode 100644
index 40c72f748890a5558ffc8ac16b98147d63938d28..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/video_classification_model.py
+++ /dev/null
@@ -1,128 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Build video classification models."""
-from typing import Any, Mapping, Optional, Union, List, Text
-
-import tensorflow as tf
-
-layers = tf.keras.layers
-
-
-@tf.keras.utils.register_keras_serializable(package='Beta')
-class VideoClassificationModel(tf.keras.Model):
- """A video classification class builder."""
-
- def __init__(
- self,
- backbone: tf.keras.Model,
- num_classes: int,
- input_specs: Optional[Mapping[str, tf.keras.layers.InputSpec]] = None,
- dropout_rate: float = 0.0,
- aggregate_endpoints: bool = False,
- kernel_initializer: str = 'random_uniform',
- kernel_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- bias_regularizer: Optional[tf.keras.regularizers.Regularizer] = None,
- require_endpoints: Optional[List[Text]] = None,
- **kwargs):
- """Video Classification initialization function.
-
- Args:
- backbone: a 3d backbone network.
- num_classes: `int` number of classes in classification task.
- input_specs: `tf.keras.layers.InputSpec` specs of the input tensor.
- dropout_rate: `float` rate for dropout regularization.
- aggregate_endpoints: `bool` aggregate all end ponits or only use the
- final end point.
- kernel_initializer: kernel initializer for the dense layer.
- kernel_regularizer: tf.keras.regularizers.Regularizer object. Default to
- None.
- bias_regularizer: tf.keras.regularizers.Regularizer object. Default to
- None.
- require_endpoints: the required endpoints for prediction. If None or
- empty, then only uses the final endpoint.
- **kwargs: keyword arguments to be passed.
- """
- if not input_specs:
- input_specs = {
- 'image': layers.InputSpec(shape=[None, None, None, None, 3])
- }
- self._self_setattr_tracking = False
- self._config_dict = {
- 'backbone': backbone,
- 'num_classes': num_classes,
- 'input_specs': input_specs,
- 'dropout_rate': dropout_rate,
- 'aggregate_endpoints': aggregate_endpoints,
- 'kernel_initializer': kernel_initializer,
- 'kernel_regularizer': kernel_regularizer,
- 'bias_regularizer': bias_regularizer,
- 'require_endpoints': require_endpoints,
- }
- self._input_specs = input_specs
- self._kernel_regularizer = kernel_regularizer
- self._bias_regularizer = bias_regularizer
- self._backbone = backbone
-
- inputs = {
- k: tf.keras.Input(shape=v.shape[1:]) for k, v in input_specs.items()
- }
- endpoints = backbone(inputs['image'])
-
- if aggregate_endpoints:
- pooled_feats = []
- for endpoint in endpoints.values():
- x_pool = tf.keras.layers.GlobalAveragePooling3D()(endpoint)
- pooled_feats.append(x_pool)
- x = tf.concat(pooled_feats, axis=1)
- else:
- if not require_endpoints:
- # Uses the last endpoint for prediction.
- x = endpoints[max(endpoints.keys())]
- x = tf.keras.layers.GlobalAveragePooling3D()(x)
- else:
- # Concats all the required endpoints for prediction.
- outputs = []
- for name in require_endpoints:
- x = endpoints[name]
- x = tf.keras.layers.GlobalAveragePooling3D()(x)
- outputs.append(x)
- x = tf.concat(outputs, axis=1)
-
- x = tf.keras.layers.Dropout(dropout_rate)(x)
- x = tf.keras.layers.Dense(
- num_classes, kernel_initializer=kernel_initializer,
- kernel_regularizer=self._kernel_regularizer,
- bias_regularizer=self._bias_regularizer)(
- x)
-
- super(VideoClassificationModel, self).__init__(
- inputs=inputs, outputs=x, **kwargs)
-
- @property
- def checkpoint_items(
- self) -> Mapping[str, Union[tf.keras.Model, tf.keras.layers.Layer]]:
- """Returns a dictionary of items to be additionally checkpointed."""
- return dict(backbone=self.backbone)
-
- @property
- def backbone(self) -> tf.keras.Model:
- return self._backbone
-
- def get_config(self) -> Mapping[str, Any]:
- return self._config_dict
-
- @classmethod
- def from_config(cls, config, custom_objects=None):
- return cls(**config)
diff --git a/official/vision/beta/modeling/video_classification_model_test.py b/official/vision/beta/modeling/video_classification_model_test.py
deleted file mode 100644
index d5ba66a258acb78a2290a22195384e653264d23c..0000000000000000000000000000000000000000
--- a/official/vision/beta/modeling/video_classification_model_test.py
+++ /dev/null
@@ -1,92 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tests for video classification network."""
-
-# Import libraries
-from absl.testing import parameterized
-import numpy as np
-import tensorflow as tf
-
-from official.vision.beta.modeling import backbones
-from official.vision.beta.modeling import video_classification_model
-
-
-class VideoClassificationNetworkTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- (50, 8, 112, 'relu', False),
- (50, 8, 112, 'swish', True),
- )
- def test_resnet3d_network_creation(self, model_id, temporal_size,
- spatial_size, activation,
- aggregate_endpoints):
- """Test for creation of a ResNet3D-50 classifier."""
- input_specs = tf.keras.layers.InputSpec(
- shape=[None, temporal_size, spatial_size, spatial_size, 3])
- temporal_strides = [1, 1, 1, 1]
- temporal_kernel_sizes = [(3, 3, 3), (3, 1, 3, 1), (3, 1, 3, 1, 3, 1),
- (1, 3, 1)]
-
- tf.keras.backend.set_image_data_format('channels_last')
-
- backbone = backbones.ResNet3D(
- model_id=model_id,
- temporal_strides=temporal_strides,
- temporal_kernel_sizes=temporal_kernel_sizes,
- input_specs=input_specs,
- activation=activation)
-
- num_classes = 1000
- model = video_classification_model.VideoClassificationModel(
- backbone=backbone,
- num_classes=num_classes,
- input_specs={'image': input_specs},
- dropout_rate=0.2,
- aggregate_endpoints=aggregate_endpoints,
- )
-
- inputs = np.random.rand(2, temporal_size, spatial_size, spatial_size, 3)
- logits = model(inputs)
- self.assertAllEqual([2, num_classes], logits.numpy().shape)
-
- def test_serialize_deserialize(self):
- """Validate the classification network can be serialized and deserialized."""
- model_id = 50
- temporal_strides = [1, 1, 1, 1]
- temporal_kernel_sizes = [(3, 3, 3), (3, 1, 3, 1), (3, 1, 3, 1, 3, 1),
- (1, 3, 1)]
-
- backbone = backbones.ResNet3D(
- model_id=model_id,
- temporal_strides=temporal_strides,
- temporal_kernel_sizes=temporal_kernel_sizes)
-
- model = video_classification_model.VideoClassificationModel(
- backbone=backbone, num_classes=1000)
-
- config = model.get_config()
- new_model = video_classification_model.VideoClassificationModel.from_config(
- config)
-
- # Validate that the config can be forced to JSON.
- _ = new_model.to_json()
-
- # If the serialization was successful, the new config should match the old.
- self.assertAllEqual(model.get_config(), new_model.get_config())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/ops/__init__.py b/official/vision/beta/ops/__init__.py
deleted file mode 100644
index 310bfb28f0c252bc4a4485325059bff28c5250c2..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/__init__.py
+++ /dev/null
@@ -1,14 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
diff --git a/official/vision/beta/ops/anchor.py b/official/vision/beta/ops/anchor.py
deleted file mode 100644
index 9351864bd4514edc81698288512a474f70095a57..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/anchor.py
+++ /dev/null
@@ -1,373 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Anchor box and labeler definition."""
-
-import collections
-
-# Import libraries
-
-import tensorflow as tf
-
-from official.vision.beta.ops import anchor_generator
-from official.vision.beta.ops import box_matcher
-from official.vision.beta.ops import iou_similarity
-from official.vision.beta.ops import target_gather
-from official.vision.utils.object_detection import balanced_positive_negative_sampler
-from official.vision.utils.object_detection import box_list
-from official.vision.utils.object_detection import faster_rcnn_box_coder
-
-
-class Anchor(object):
- """Anchor class for anchor-based object detectors."""
-
- def __init__(self,
- min_level,
- max_level,
- num_scales,
- aspect_ratios,
- anchor_size,
- image_size):
- """Constructs multiscale anchors.
-
- Args:
- min_level: integer number of minimum level of the output feature pyramid.
- max_level: integer number of maximum level of the output feature pyramid.
- num_scales: integer number representing intermediate scales added
- on each level. For instances, num_scales=2 adds one additional
- intermediate anchor scales [2^0, 2^0.5] on each level.
- aspect_ratios: list of float numbers representing the aspect raito anchors
- added on each level. The number indicates the ratio of width to height.
- For instances, aspect_ratios=[1.0, 2.0, 0.5] adds three anchors on each
- scale level.
- anchor_size: float number representing the scale of size of the base
- anchor to the feature stride 2^level.
- image_size: a list of integer numbers or Tensors representing
- [height, width] of the input image size.The image_size should be divided
- by the largest feature stride 2^max_level.
- """
- self.min_level = min_level
- self.max_level = max_level
- self.num_scales = num_scales
- self.aspect_ratios = aspect_ratios
- self.anchor_size = anchor_size
- self.image_size = image_size
- self.boxes = self._generate_boxes()
-
- def _generate_boxes(self):
- """Generates multiscale anchor boxes.
-
- Returns:
- a Tensor of shape [N, 4], representing anchor boxes of all levels
- concatenated together.
- """
- boxes_all = []
- for level in range(self.min_level, self.max_level + 1):
- boxes_l = []
- for scale in range(self.num_scales):
- for aspect_ratio in self.aspect_ratios:
- stride = 2 ** level
- intermidate_scale = 2 ** (scale / float(self.num_scales))
- base_anchor_size = self.anchor_size * stride * intermidate_scale
- aspect_x = aspect_ratio ** 0.5
- aspect_y = aspect_ratio ** -0.5
- half_anchor_size_x = base_anchor_size * aspect_x / 2.0
- half_anchor_size_y = base_anchor_size * aspect_y / 2.0
- x = tf.range(stride / 2, self.image_size[1], stride)
- y = tf.range(stride / 2, self.image_size[0], stride)
- xv, yv = tf.meshgrid(x, y)
- xv = tf.cast(tf.reshape(xv, [-1]), dtype=tf.float32)
- yv = tf.cast(tf.reshape(yv, [-1]), dtype=tf.float32)
- # Tensor shape Nx4.
- boxes = tf.stack([yv - half_anchor_size_y, xv - half_anchor_size_x,
- yv + half_anchor_size_y, xv + half_anchor_size_x],
- axis=1)
- boxes_l.append(boxes)
- # Concat anchors on the same level to tensor shape NxAx4.
- boxes_l = tf.stack(boxes_l, axis=1)
- boxes_l = tf.reshape(boxes_l, [-1, 4])
- boxes_all.append(boxes_l)
- return tf.concat(boxes_all, axis=0)
-
- def unpack_labels(self, labels):
- """Unpacks an array of labels into multiscales labels."""
- unpacked_labels = collections.OrderedDict()
- count = 0
- for level in range(self.min_level, self.max_level + 1):
- feat_size_y = tf.cast(self.image_size[0] / 2 ** level, tf.int32)
- feat_size_x = tf.cast(self.image_size[1] / 2 ** level, tf.int32)
- steps = feat_size_y * feat_size_x * self.anchors_per_location
- unpacked_labels[str(level)] = tf.reshape(
- labels[count:count + steps], [feat_size_y, feat_size_x, -1])
- count += steps
- return unpacked_labels
-
- @property
- def anchors_per_location(self):
- return self.num_scales * len(self.aspect_ratios)
-
- @property
- def multilevel_boxes(self):
- return self.unpack_labels(self.boxes)
-
-
-class AnchorLabeler(object):
- """Labeler for dense object detector."""
-
- def __init__(self,
- match_threshold=0.5,
- unmatched_threshold=0.5):
- """Constructs anchor labeler to assign labels to anchors.
-
- Args:
- match_threshold: a float number between 0 and 1 representing the
- lower-bound threshold to assign positive labels for anchors. An anchor
- with a score over the threshold is labeled positive.
- unmatched_threshold: a float number between 0 and 1 representing the
- upper-bound threshold to assign negative labels for anchors. An anchor
- with a score below the threshold is labeled negative.
- """
- self.similarity_calc = iou_similarity.IouSimilarity()
- self.target_gather = target_gather.TargetGather()
- self.matcher = box_matcher.BoxMatcher(
- thresholds=[unmatched_threshold, match_threshold],
- indicators=[-1, -2, 1],
- force_match_for_each_col=True)
- self.box_coder = faster_rcnn_box_coder.FasterRcnnBoxCoder()
-
- def label_anchors(self,
- anchor_boxes,
- gt_boxes,
- gt_labels,
- gt_attributes=None):
- """Labels anchors with ground truth inputs.
-
- Args:
- anchor_boxes: A float tensor with shape [N, 4] representing anchor boxes.
- For each row, it stores [y0, x0, y1, x1] for four corners of a box.
- gt_boxes: A float tensor with shape [N, 4] representing groundtruth boxes.
- For each row, it stores [y0, x0, y1, x1] for four corners of a box.
- gt_labels: A integer tensor with shape [N, 1] representing groundtruth
- classes.
- gt_attributes: If not None, a dict of (name, gt_attribute) pairs.
- `gt_attribute` is a float tensor with shape [N, attribute_size]
- representing groundtruth attributes.
- Returns:
- cls_targets_dict: ordered dictionary with keys
- [min_level, min_level+1, ..., max_level]. The values are tensor with
- shape [height_l, width_l, num_anchors_per_location]. The height_l and
- width_l represent the dimension of class logits at l-th level.
- box_targets_dict: ordered dictionary with keys
- [min_level, min_level+1, ..., max_level]. The values are tensor with
- shape [height_l, width_l, num_anchors_per_location * 4]. The height_l
- and width_l represent the dimension of bounding box regression output at
- l-th level.
- attribute_targets_dict: a dict with (name, attribute_targets) pairs. Each
- `attribute_targets` represents an ordered dictionary with keys
- [min_level, min_level+1, ..., max_level]. The values are tensor with
- shape [height_l, width_l, num_anchors_per_location * attribute_size].
- The height_l and width_l represent the dimension of attribute prediction
- output at l-th level.
- cls_weights: A flattened Tensor with shape [batch_size, num_anchors], that
- serves as masking / sample weight for classification loss. Its value
- is 1.0 for positive and negative matched anchors, and 0.0 for ignored
- anchors.
- box_weights: A flattened Tensor with shape [batch_size, num_anchors], that
- serves as masking / sample weight for regression loss. Its value is
- 1.0 for positive matched anchors, and 0.0 for negative and ignored
- anchors.
- """
- flattened_anchor_boxes = []
- for anchors in anchor_boxes.values():
- flattened_anchor_boxes.append(tf.reshape(anchors, [-1, 4]))
- flattened_anchor_boxes = tf.concat(flattened_anchor_boxes, axis=0)
- similarity_matrix = self.similarity_calc(flattened_anchor_boxes, gt_boxes)
- match_indices, match_indicators = self.matcher(similarity_matrix)
-
- mask = tf.less_equal(match_indicators, 0)
- cls_mask = tf.expand_dims(mask, -1)
- cls_targets = self.target_gather(gt_labels, match_indices, cls_mask, -1)
- box_mask = tf.tile(cls_mask, [1, 4])
- box_targets = self.target_gather(gt_boxes, match_indices, box_mask)
- att_targets = {}
- if gt_attributes:
- for k, v in gt_attributes.items():
- att_size = v.get_shape().as_list()[-1]
- att_mask = tf.tile(cls_mask, [1, att_size])
- att_targets[k] = self.target_gather(v, match_indices, att_mask, 0.0)
-
- weights = tf.squeeze(tf.ones_like(gt_labels, dtype=tf.float32), -1)
- box_weights = self.target_gather(weights, match_indices, mask)
- ignore_mask = tf.equal(match_indicators, -2)
- cls_weights = self.target_gather(weights, match_indices, ignore_mask)
- box_targets_list = box_list.BoxList(box_targets)
- anchor_box_list = box_list.BoxList(flattened_anchor_boxes)
- box_targets = self.box_coder.encode(box_targets_list, anchor_box_list)
-
- # Unpacks labels into multi-level representations.
- cls_targets_dict = unpack_targets(cls_targets, anchor_boxes)
- box_targets_dict = unpack_targets(box_targets, anchor_boxes)
- attribute_targets_dict = {}
- for k, v in att_targets.items():
- attribute_targets_dict[k] = unpack_targets(v, anchor_boxes)
-
- return cls_targets_dict, box_targets_dict, attribute_targets_dict, cls_weights, box_weights
-
-
-class RpnAnchorLabeler(AnchorLabeler):
- """Labeler for Region Proposal Network."""
-
- def __init__(self,
- match_threshold=0.7,
- unmatched_threshold=0.3,
- rpn_batch_size_per_im=256,
- rpn_fg_fraction=0.5):
- AnchorLabeler.__init__(self, match_threshold=match_threshold,
- unmatched_threshold=unmatched_threshold)
- self._rpn_batch_size_per_im = rpn_batch_size_per_im
- self._rpn_fg_fraction = rpn_fg_fraction
-
- def _get_rpn_samples(self, match_results):
- """Computes anchor labels.
-
- This function performs subsampling for foreground (fg) and background (bg)
- anchors.
- Args:
- match_results: A integer tensor with shape [N] representing the
- matching results of anchors. (1) match_results[i]>=0,
- meaning that column i is matched with row match_results[i].
- (2) match_results[i]=-1, meaning that column i is not matched.
- (3) match_results[i]=-2, meaning that column i is ignored.
- Returns:
- score_targets: a integer tensor with the a shape of [N].
- (1) score_targets[i]=1, the anchor is a positive sample.
- (2) score_targets[i]=0, negative. (3) score_targets[i]=-1, the anchor is
- don't care (ignore).
- """
- sampler = (
- balanced_positive_negative_sampler.BalancedPositiveNegativeSampler(
- positive_fraction=self._rpn_fg_fraction, is_static=False))
- # indicator includes both positive and negative labels.
- # labels includes only positives labels.
- # positives = indicator & labels.
- # negatives = indicator & !labels.
- # ignore = !indicator.
- indicator = tf.greater(match_results, -2)
- labels = tf.greater(match_results, -1)
-
- samples = sampler.subsample(
- indicator, self._rpn_batch_size_per_im, labels)
- positive_labels = tf.where(
- tf.logical_and(samples, labels),
- tf.constant(2, dtype=tf.int32, shape=match_results.shape),
- tf.constant(0, dtype=tf.int32, shape=match_results.shape))
- negative_labels = tf.where(
- tf.logical_and(samples, tf.logical_not(labels)),
- tf.constant(1, dtype=tf.int32, shape=match_results.shape),
- tf.constant(0, dtype=tf.int32, shape=match_results.shape))
- ignore_labels = tf.fill(match_results.shape, -1)
-
- return (ignore_labels + positive_labels + negative_labels,
- positive_labels, negative_labels)
-
- def label_anchors(self, anchor_boxes, gt_boxes, gt_labels):
- """Labels anchors with ground truth inputs.
-
- Args:
- anchor_boxes: A float tensor with shape [N, 4] representing anchor boxes.
- For each row, it stores [y0, x0, y1, x1] for four corners of a box.
- gt_boxes: A float tensor with shape [N, 4] representing groundtruth boxes.
- For each row, it stores [y0, x0, y1, x1] for four corners of a box.
- gt_labels: A integer tensor with shape [N, 1] representing groundtruth
- classes.
- Returns:
- score_targets_dict: ordered dictionary with keys
- [min_level, min_level+1, ..., max_level]. The values are tensor with
- shape [height_l, width_l, num_anchors]. The height_l and width_l
- represent the dimension of class logits at l-th level.
- box_targets_dict: ordered dictionary with keys
- [min_level, min_level+1, ..., max_level]. The values are tensor with
- shape [height_l, width_l, num_anchors * 4]. The height_l and
- width_l represent the dimension of bounding box regression output at
- l-th level.
- """
- flattened_anchor_boxes = []
- for anchors in anchor_boxes.values():
- flattened_anchor_boxes.append(tf.reshape(anchors, [-1, 4]))
- flattened_anchor_boxes = tf.concat(flattened_anchor_boxes, axis=0)
- similarity_matrix = self.similarity_calc(flattened_anchor_boxes, gt_boxes)
- match_indices, match_indicators = self.matcher(similarity_matrix)
- box_mask = tf.tile(tf.expand_dims(tf.less_equal(match_indicators, 0), -1),
- [1, 4])
- box_targets = self.target_gather(gt_boxes, match_indices, box_mask)
- box_targets_list = box_list.BoxList(box_targets)
- anchor_box_list = box_list.BoxList(flattened_anchor_boxes)
- box_targets = self.box_coder.encode(box_targets_list, anchor_box_list)
-
- # Zero out the unmatched and ignored regression targets.
- num_matches = match_indices.shape.as_list()[0] or tf.shape(match_indices)[0]
- unmatched_ignored_box_targets = tf.zeros([num_matches, 4], dtype=tf.float32)
- matched_anchors_mask = tf.greater_equal(match_indicators, 0)
- # To broadcast matched_anchors_mask to the same shape as
- # matched_reg_targets.
- matched_anchors_mask = tf.tile(
- tf.expand_dims(matched_anchors_mask, 1),
- [1, tf.shape(box_targets)[1]])
- box_targets = tf.where(matched_anchors_mask, box_targets,
- unmatched_ignored_box_targets)
-
- # score_targets contains the subsampled positive and negative anchors.
- score_targets, _, _ = self._get_rpn_samples(match_indicators)
-
- # Unpacks labels.
- score_targets_dict = unpack_targets(score_targets, anchor_boxes)
- box_targets_dict = unpack_targets(box_targets, anchor_boxes)
-
- return score_targets_dict, box_targets_dict
-
-
-def build_anchor_generator(min_level, max_level, num_scales, aspect_ratios,
- anchor_size):
- """Build anchor generator from levels."""
- anchor_sizes = collections.OrderedDict()
- strides = collections.OrderedDict()
- scales = []
- for scale in range(num_scales):
- scales.append(2**(scale / float(num_scales)))
- for level in range(min_level, max_level + 1):
- stride = 2**level
- strides[str(level)] = stride
- anchor_sizes[str(level)] = anchor_size * stride
- anchor_gen = anchor_generator.AnchorGenerator(
- anchor_sizes=anchor_sizes,
- scales=scales,
- aspect_ratios=aspect_ratios,
- strides=strides)
- return anchor_gen
-
-
-def unpack_targets(targets, anchor_boxes_dict):
- """Unpacks an array of labels into multiscales labels."""
- unpacked_targets = collections.OrderedDict()
- count = 0
- for level, anchor_boxes in anchor_boxes_dict.items():
- feat_size_shape = anchor_boxes.shape.as_list()
- feat_size_y = feat_size_shape[0]
- feat_size_x = feat_size_shape[1]
- anchors_per_location = int(feat_size_shape[2] / 4)
- steps = feat_size_y * feat_size_x * anchors_per_location
- unpacked_targets[level] = tf.reshape(targets[count:count + steps],
- [feat_size_y, feat_size_x, -1])
- count += steps
- return unpacked_targets
diff --git a/official/vision/beta/ops/anchor_generator.py b/official/vision/beta/ops/anchor_generator.py
deleted file mode 100644
index b2ced0c62d6b758a08edeadf707d04514f7fc263..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/anchor_generator.py
+++ /dev/null
@@ -1,182 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Multi scale anchor generator definition."""
-
-import tensorflow as tf
-
-
-# (TODO/tanzheny): consider having customized anchor offset.
-class _SingleAnchorGenerator:
- """Utility to generate anchors for a single feature map.
-
- Example:
- ```python
- anchor_gen = _SingleAnchorGenerator(32, [.5, 1., 2.], stride=16)
- anchors = anchor_gen([512, 512, 3])
- ```
- """
-
- def __init__(self,
- anchor_size,
- scales,
- aspect_ratios,
- stride,
- clip_boxes=False):
- """Constructs single scale anchor.
-
- Args:
- anchor_size: A single int represents the base anchor size. The anchor
- height will be `anchor_size / sqrt(aspect_ratio)`, anchor width will be
- `anchor_size * sqrt(aspect_ratio)`.
- scales: A list/tuple, or a list/tuple of a list/tuple of positive
- floats representing the actual anchor size to the base `anchor_size`.
- aspect_ratios: a list/tuple of positive floats representing the ratio of
- anchor width to anchor height.
- stride: A single int represents the anchor stride size between center of
- each anchor.
- clip_boxes: Boolean to represent whether the anchor coordinates should be
- clipped to the image size. Defaults to `True`.
- Input shape: the size of the image, `[H, W, C]`
- Output shape: the size of anchors, `[(H / stride) * (W / stride), 4]`
- """
- self.anchor_size = anchor_size
- self.scales = scales
- self.aspect_ratios = aspect_ratios
- self.stride = stride
- self.clip_boxes = clip_boxes
-
- def __call__(self, image_size):
- image_height = tf.cast(image_size[0], tf.float32)
- image_width = tf.cast(image_size[1], tf.float32)
-
- k = len(self.scales) * len(self.aspect_ratios)
- aspect_ratios_sqrt = tf.cast(tf.sqrt(self.aspect_ratios), dtype=tf.float32)
- anchor_size = tf.cast(self.anchor_size, tf.float32)
-
- # [K]
- anchor_heights = []
- anchor_widths = []
- for scale in self.scales:
- anchor_size_t = anchor_size * scale
- anchor_height = anchor_size_t / aspect_ratios_sqrt
- anchor_width = anchor_size_t * aspect_ratios_sqrt
- anchor_heights.append(anchor_height)
- anchor_widths.append(anchor_width)
- anchor_heights = tf.concat(anchor_heights, axis=0)
- anchor_widths = tf.concat(anchor_widths, axis=0)
- half_anchor_heights = tf.reshape(0.5 * anchor_heights, [1, 1, k])
- half_anchor_widths = tf.reshape(0.5 * anchor_widths, [1, 1, k])
-
- stride = tf.cast(self.stride, tf.float32)
- # [W]
- cx = tf.range(0.5 * stride, image_width, stride)
- # [H]
- cy = tf.range(0.5 * stride, image_height, stride)
- # [H, W]
- cx_grid, cy_grid = tf.meshgrid(cx, cy)
- # [H, W, 1]
- cx_grid = tf.expand_dims(cx_grid, axis=-1)
- cy_grid = tf.expand_dims(cy_grid, axis=-1)
-
- # [H, W, K, 1]
- y_min = tf.expand_dims(cy_grid - half_anchor_heights, axis=-1)
- y_max = tf.expand_dims(cy_grid + half_anchor_heights, axis=-1)
- x_min = tf.expand_dims(cx_grid - half_anchor_widths, axis=-1)
- x_max = tf.expand_dims(cx_grid + half_anchor_widths, axis=-1)
-
- if self.clip_boxes:
- y_min = tf.maximum(tf.minimum(y_min, image_height), 0.)
- y_max = tf.maximum(tf.minimum(y_max, image_height), 0.)
- x_min = tf.maximum(tf.minimum(x_min, image_width), 0.)
- x_max = tf.maximum(tf.minimum(x_max, image_width), 0.)
-
- # [H, W, K, 4]
- result = tf.concat([y_min, x_min, y_max, x_max], axis=-1)
- shape = result.shape.as_list()
- # [H, W, K * 4]
- return tf.reshape(result, [shape[0], shape[1], shape[2] * shape[3]])
-
-
-class AnchorGenerator():
- """Utility to generate anchors for a multiple feature maps.
-
- Example:
- ```python
- anchor_gen = AnchorGenerator([32, 64], [.5, 1., 2.],
- strides=[16, 32])
- anchors = anchor_gen([512, 512, 3])
- ```
-
- """
-
- def __init__(self,
- anchor_sizes,
- scales,
- aspect_ratios,
- strides,
- clip_boxes=False):
- """Constructs multiscale anchors.
-
- Args:
- anchor_sizes: A list of int represents the anchor size for each scale. The
- anchor height will be `anchor_size / sqrt(aspect_ratio)`, anchor width
- will be `anchor_size * sqrt(aspect_ratio)` for each scale.
- scales: A list/tuple, or a list/tuple of a list/tuple of positive
- floats representing the actual anchor size to the base `anchor_size`.
- aspect_ratios: A list/tuple, or a list/tuple of a list/tuple of positive
- floats representing the ratio of anchor width to anchor height.
- strides: A list/tuple of ints represent the anchor stride size between
- center of anchors at each scale.
- clip_boxes: Boolean to represents whether the anchor coordinates should be
- clipped to the image size. Defaults to `False`.
- Input shape: the size of the image, `[H, W, C]`
- Output shape: the size of anchors concat on each level, `[(H /
- strides) * (W / strides), K * 4]`
- """
- # aspect_ratio is a single list that is the same across all levels.
- aspect_ratios = maybe_map_structure_for_anchor(aspect_ratios, anchor_sizes)
- scales = maybe_map_structure_for_anchor(scales, anchor_sizes)
- if isinstance(anchor_sizes, dict):
- self.anchor_generators = {}
- for k in anchor_sizes.keys():
- self.anchor_generators[k] = _SingleAnchorGenerator(
- anchor_sizes[k], scales[k], aspect_ratios[k], strides[k],
- clip_boxes)
- elif isinstance(anchor_sizes, (list, tuple)):
- self.anchor_generators = []
- for anchor_size, scale_list, ar_list, stride in zip(
- anchor_sizes, scales, aspect_ratios, strides):
- self.anchor_generators.append(
- _SingleAnchorGenerator(anchor_size, scale_list, ar_list, stride,
- clip_boxes))
-
- def __call__(self, image_size):
- anchor_generators = tf.nest.flatten(self.anchor_generators)
- results = [anchor_gen(image_size) for anchor_gen in anchor_generators]
- return tf.nest.pack_sequence_as(self.anchor_generators, results)
-
-
-def maybe_map_structure_for_anchor(params, anchor_sizes):
- """broadcast the params to match anchor_sizes."""
- if all(isinstance(param, (int, float)) for param in params):
- if isinstance(anchor_sizes, (tuple, list)):
- return [params] * len(anchor_sizes)
- elif isinstance(anchor_sizes, dict):
- return tf.nest.map_structure(lambda _: params, anchor_sizes)
- else:
- raise ValueError("the structure of `anchor_sizes` must be a tuple, "
- "list, or dict, given {}".format(anchor_sizes))
- else:
- return params
diff --git a/official/vision/beta/ops/anchor_generator_test.py b/official/vision/beta/ops/anchor_generator_test.py
deleted file mode 100644
index c7d89e58644ed782d99af39c5b94b5913f36c47d..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/anchor_generator_test.py
+++ /dev/null
@@ -1,137 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for anchor_generator.py."""
-
-from absl.testing import parameterized
-import tensorflow as tf
-from official.vision.beta.ops import anchor_generator
-
-
-class AnchorGeneratorTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- # Single scale anchor.
- (5, [1.0], [[[-16., -16., 48., 48.], [-16., 16., 48., 80.]],
- [[16., -16., 80., 48.], [16., 16., 80., 80.]]]),
- # # Multi aspect ratio anchor.
- (6, [1.0, 4.0, 0.25],
- [[[-32., -32., 96., 96., 0., -96., 64., 160., -96., 0., 160., 64.]]]),
- )
- def testAnchorGeneration(self, level, aspect_ratios, expected_boxes):
- image_size = [64, 64]
- anchor_size = 2**(level + 1)
- stride = 2**level
- anchor_gen = anchor_generator._SingleAnchorGenerator(
- anchor_size=anchor_size,
- scales=[1.],
- aspect_ratios=aspect_ratios,
- stride=stride,
- clip_boxes=False)
- anchors = anchor_gen(image_size).numpy()
- self.assertAllClose(expected_boxes, anchors)
-
- @parameterized.parameters(
- # Single scale anchor.
- (5, [1.0], [[[0., 0., 48., 48.], [0., 16., 48., 64.]],
- [[16., 0., 64., 48.], [16., 16., 64., 64.]]]),
- # # Multi aspect ratio anchor.
- (6, [1.0, 4.0, 0.25
- ], [[[0., 0., 64., 64., 0., 0., 64., 64., 0., 0., 64., 64.]]]),
- )
- def testAnchorGenerationClipped(self, level, aspect_ratios, expected_boxes):
- image_size = [64, 64]
- anchor_size = 2**(level + 1)
- stride = 2**level
- anchor_gen = anchor_generator._SingleAnchorGenerator(
- anchor_size=anchor_size,
- scales=[1.],
- aspect_ratios=aspect_ratios,
- stride=stride,
- clip_boxes=True)
- anchors = anchor_gen(image_size).numpy()
- self.assertAllClose(expected_boxes, anchors)
-
-
-class MultiScaleAnchorGeneratorTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- # Multi scale anchor.
- (5, 6, [[1.0], [1.0]], [[-16, -16, 48, 48], [-16, 16, 48, 80],
- [16, -16, 80, 48], [16, 16, 80, 80],
- [-32, -32, 96, 96]]),)
- def testAnchorGeneration(self, min_level, max_level, aspect_ratios,
- expected_boxes):
- image_size = [64, 64]
- levels = range(min_level, max_level + 1)
- anchor_sizes = [2**(level + 1) for level in levels]
- strides = [2**level for level in levels]
- anchor_gen = anchor_generator.AnchorGenerator(
- anchor_sizes=anchor_sizes,
- scales=[1.],
- aspect_ratios=aspect_ratios,
- strides=strides)
- anchors = anchor_gen(image_size)
- anchors = [tf.reshape(anchor, [-1, 4]) for anchor in anchors]
- anchors = tf.concat(anchors, axis=0).numpy()
- self.assertAllClose(expected_boxes, anchors)
-
- @parameterized.parameters(
- # Multi scale anchor.
- (5, 6, [[1.0], [1.0]], [[-16, -16, 48, 48], [-16, 16, 48, 80],
- [16, -16, 80, 48], [16, 16, 80, 80],
- [-32, -32, 96, 96]]),)
- def testAnchorGenerationClipped(self, min_level, max_level, aspect_ratios,
- expected_boxes):
- image_size = [64, 64]
- levels = range(min_level, max_level + 1)
- anchor_sizes = [2**(level + 1) for level in levels]
- strides = [2**level for level in levels]
- anchor_gen = anchor_generator.AnchorGenerator(
- anchor_sizes=anchor_sizes,
- scales=[1.],
- aspect_ratios=aspect_ratios,
- strides=strides,
- clip_boxes=False)
- anchors = anchor_gen(image_size)
- anchors = [tf.reshape(anchor, [-1, 4]) for anchor in anchors]
- anchors = tf.concat(anchors, axis=0).numpy()
- self.assertAllClose(expected_boxes, anchors)
-
- @parameterized.parameters(
- # Multi scale anchor.
- (5, 6, [1.0], {
- '5': [[[-16., -16., 48., 48.], [-16., 16., 48., 80.]],
- [[16., -16., 80., 48.], [16., 16., 80., 80.]]],
- '6': [[[-32, -32, 96, 96]]]
- }),)
- def testAnchorGenerationDict(self, min_level, max_level, aspect_ratios,
- expected_boxes):
- image_size = [64, 64]
- levels = range(min_level, max_level + 1)
- anchor_sizes = dict((str(level), 2**(level + 1)) for level in levels)
- strides = dict((str(level), 2**level) for level in levels)
- anchor_gen = anchor_generator.AnchorGenerator(
- anchor_sizes=anchor_sizes,
- scales=[1.],
- aspect_ratios=aspect_ratios,
- strides=strides,
- clip_boxes=False)
- anchors = anchor_gen(image_size)
- for k in expected_boxes.keys():
- self.assertAllClose(expected_boxes[k], anchors[k].numpy())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/ops/anchor_test.py b/official/vision/beta/ops/anchor_test.py
deleted file mode 100644
index 9d55cbcff36c70d82ae3e95948016502aa8c4b00..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/anchor_test.py
+++ /dev/null
@@ -1,186 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for anchor.py."""
-
-# Import libraries
-from absl.testing import parameterized
-import numpy as np
-import tensorflow as tf
-from official.vision.beta.ops import anchor
-
-
-class AnchorTest(parameterized.TestCase, tf.test.TestCase):
-
- # The set of parameters are tailored for the MLPerf configuration, where
- # the number of anchors is 495132, rpn_batch_size_per_im=256, and
- # rpn_fg_fraction=0.5.
- @parameterized.parameters(
- (512, 25, 25, 25, 25, (512, 512)),
- (512, 25, 25, 25, 25, (512, 640)),
- (512, 25, 25, 25, 25, (640, 512)),
- (495132, 100, 100, 100, 100, (512, 512)),
- (495132, 200, 100, 128, 100, (512, 512)),
- (495132, 100, 120, 100, 120, (512, 512)),
- (495132, 100, 200, 100, 156, (512, 512)),
- (495132, 200, 200, 128, 128, (512, 512)),
- )
- def testAnchorRpnSample(self, num_anchors, num_positives,
- num_negatives, expected_positives,
- expected_negatives, image_size):
- match_results_np = np.empty([num_anchors])
- match_results_np.fill(-2)
- match_results_np[:num_positives] = 0
- match_results_np[num_positives:num_positives + num_negatives] = -1
- match_results = tf.convert_to_tensor(value=match_results_np, dtype=tf.int32)
- anchor_labeler = anchor.RpnAnchorLabeler(
- match_threshold=0.7,
- unmatched_threshold=0.3,
- rpn_batch_size_per_im=256,
- rpn_fg_fraction=0.5)
- rpn_sample_op = anchor_labeler._get_rpn_samples(match_results)
- labels = [v.numpy() for v in rpn_sample_op]
- self.assertLen(labels[0], num_anchors)
- positives = np.sum(np.array(labels[0]) == 1)
- negatives = np.sum(np.array(labels[0]) == 0)
- self.assertEqual(positives, expected_positives)
- self.assertEqual(negatives, expected_negatives)
-
- @parameterized.parameters(
- # Single scale anchor.
- (5, 5, 1, [1.0], 2.0,
- [[-16, -16, 48, 48], [-16, 16, 48, 80],
- [16, -16, 80, 48], [16, 16, 80, 80]]),
- # Multi scale anchor.
- (5, 6, 1, [1.0], 2.0,
- [[-16, -16, 48, 48], [-16, 16, 48, 80],
- [16, -16, 80, 48], [16, 16, 80, 80], [-32, -32, 96, 96]]),
- # # Multi aspect ratio anchor.
- (6, 6, 1, [1.0, 4.0, 0.25], 2.0,
- [[-32, -32, 96, 96], [-0, -96, 64, 160], [-96, -0, 160, 64]]),
-
- )
- def testAnchorGeneration(self, min_level, max_level, num_scales,
- aspect_ratios, anchor_size, expected_boxes):
- image_size = [64, 64]
- anchors = anchor.Anchor(min_level, max_level, num_scales, aspect_ratios,
- anchor_size, image_size)
- boxes = anchors.boxes.numpy()
- self.assertEqual(expected_boxes, boxes.tolist())
-
- @parameterized.parameters(
- # Single scale anchor.
- (5, 5, 1, [1.0], 2.0,
- [[-16, -16, 48, 48], [-16, 16, 48, 80],
- [16, -16, 80, 48], [16, 16, 80, 80]]),
- # Multi scale anchor.
- (5, 6, 1, [1.0], 2.0,
- [[-16, -16, 48, 48], [-16, 16, 48, 80],
- [16, -16, 80, 48], [16, 16, 80, 80], [-32, -32, 96, 96]]),
- # # Multi aspect ratio anchor.
- (6, 6, 1, [1.0, 4.0, 0.25], 2.0,
- [[-32, -32, 96, 96], [-0, -96, 64, 160], [-96, -0, 160, 64]]),
-
- )
- def testAnchorGenerationWithImageSizeAsTensor(self,
- min_level,
- max_level,
- num_scales,
- aspect_ratios,
- anchor_size,
- expected_boxes):
- image_size = tf.constant([64, 64], tf.int32)
- anchors = anchor.Anchor(min_level, max_level, num_scales, aspect_ratios,
- anchor_size, image_size)
- boxes = anchors.boxes.numpy()
- self.assertEqual(expected_boxes, boxes.tolist())
-
- @parameterized.parameters(
- (3, 6, 2, [1.0], 2.0, False),
- (3, 6, 2, [1.0], 2.0, True),
- )
- def testLabelAnchors(self, min_level, max_level, num_scales, aspect_ratios,
- anchor_size, has_attribute):
- input_size = [512, 512]
- ground_truth_class_id = 2
- attribute_name = 'depth'
- ground_truth_depth = 3.0
-
- # The matched anchors are the anchors used as ground truth and the anchors
- # at the next octave scale on the same location.
- expected_anchor_locations = [[0, 0, 0], [0, 0, 1]]
- anchor_gen = anchor.build_anchor_generator(min_level, max_level, num_scales,
- aspect_ratios, anchor_size)
- anchor_boxes = anchor_gen(input_size)
- anchor_labeler = anchor.AnchorLabeler()
-
- # Uses the first anchors as ground truth. The ground truth should map to
- # two anchors with two intermediate scales at the same location.
- gt_boxes = anchor_boxes['3'][0:1, 0, 0:4]
- gt_classes = tf.constant([[ground_truth_class_id]], dtype=tf.float32)
- gt_attributes = {
- attribute_name: tf.constant([[ground_truth_depth]], dtype=tf.float32)
- } if has_attribute else {}
-
- (cls_targets, box_targets, att_targets, _,
- box_weights) = anchor_labeler.label_anchors(anchor_boxes, gt_boxes,
- gt_classes, gt_attributes)
-
- for k, v in cls_targets.items():
- cls_targets[k] = v.numpy()
- for k, v in box_targets.items():
- box_targets[k] = v.numpy()
- box_weights = box_weights.numpy()
-
- anchor_locations = np.vstack(
- np.where(cls_targets[str(min_level)] > -1)).transpose()
- self.assertAllClose(expected_anchor_locations, anchor_locations)
- # Two anchor boxes on min_level got matched to the gt_boxes.
- self.assertAllClose(tf.reduce_sum(box_weights), 2)
-
- if has_attribute:
- self.assertIn(attribute_name, att_targets)
- for k, v in att_targets[attribute_name].items():
- att_targets[attribute_name][k] = v.numpy()
- anchor_locations = np.vstack(
- np.where(
- att_targets[attribute_name][str(min_level)] > 0.0)).transpose()
- self.assertAllClose(expected_anchor_locations, anchor_locations)
- else:
- self.assertEmpty(att_targets)
-
- @parameterized.parameters(
- (3, 7, [.5, 1., 2.], 2, 8, (256, 256)),
- (3, 8, [1.], 3, 32, (512, 512)),
- (3, 3, [1.], 2, 4, (32, 32)),
- )
- def testEquivalentResult(self, min_level, max_level, aspect_ratios,
- num_scales, anchor_size, image_size):
- anchor_gen = anchor.build_anchor_generator(
- min_level=min_level,
- max_level=max_level,
- num_scales=num_scales,
- aspect_ratios=aspect_ratios,
- anchor_size=anchor_size)
- anchors = anchor_gen(image_size)
- expected_anchor_gen = anchor.Anchor(min_level, max_level, num_scales,
- aspect_ratios, anchor_size, image_size)
-
- expected_anchors = expected_anchor_gen.multilevel_boxes
- for k in expected_anchors.keys():
- self.assertAllClose(expected_anchors[k], anchors[k])
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/ops/augment.py b/official/vision/beta/ops/augment.py
deleted file mode 100644
index 69894ebcf410e5d30630d65ceaad3a15c879c99d..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/augment.py
+++ /dev/null
@@ -1,2320 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Augmentation policies for enhanced image/video preprocessing.
-
-AutoAugment Reference:
- - AutoAugment Reference: https://arxiv.org/abs/1805.09501
- - AutoAugment for Object Detection Reference: https://arxiv.org/abs/1906.11172
-RandAugment Reference: https://arxiv.org/abs/1909.13719
-RandomErasing Reference: https://arxiv.org/abs/1708.04896
-MixupAndCutmix:
- - Mixup: https://arxiv.org/abs/1710.09412
- - Cutmix: https://arxiv.org/abs/1905.04899
-
-RandomErasing, Mixup and Cutmix are inspired by
-https://github.com/rwightman/pytorch-image-models
-
-"""
-import inspect
-import math
-from typing import Any, List, Iterable, Optional, Text, Tuple
-
-from keras.layers.preprocessing import image_preprocessing as image_ops
-import numpy as np
-import tensorflow as tf
-
-
-# This signifies the max integer that the controller RNN could predict for the
-# augmentation scheme.
-_MAX_LEVEL = 10.
-
-
-def to_4d(image: tf.Tensor) -> tf.Tensor:
- """Converts an input Tensor to 4 dimensions.
-
- 4D image => [N, H, W, C] or [N, C, H, W]
- 3D image => [1, H, W, C] or [1, C, H, W]
- 2D image => [1, H, W, 1]
-
- Args:
- image: The 2/3/4D input tensor.
-
- Returns:
- A 4D image tensor.
-
- Raises:
- `TypeError` if `image` is not a 2/3/4D tensor.
-
- """
- shape = tf.shape(image)
- original_rank = tf.rank(image)
- left_pad = tf.cast(tf.less_equal(original_rank, 3), dtype=tf.int32)
- right_pad = tf.cast(tf.equal(original_rank, 2), dtype=tf.int32)
- new_shape = tf.concat(
- [
- tf.ones(shape=left_pad, dtype=tf.int32),
- shape,
- tf.ones(shape=right_pad, dtype=tf.int32),
- ],
- axis=0,
- )
- return tf.reshape(image, new_shape)
-
-
-def from_4d(image: tf.Tensor, ndims: tf.Tensor) -> tf.Tensor:
- """Converts a 4D image back to `ndims` rank."""
- shape = tf.shape(image)
- begin = tf.cast(tf.less_equal(ndims, 3), dtype=tf.int32)
- end = 4 - tf.cast(tf.equal(ndims, 2), dtype=tf.int32)
- new_shape = shape[begin:end]
- return tf.reshape(image, new_shape)
-
-
-def _convert_translation_to_transform(translations: tf.Tensor) -> tf.Tensor:
- """Converts translations to a projective transform.
-
- The translation matrix looks like this:
- [[1 0 -dx]
- [0 1 -dy]
- [0 0 1]]
-
- Args:
- translations: The 2-element list representing [dx, dy], or a matrix of
- 2-element lists representing [dx dy] to translate for each image. The
- shape must be static.
-
- Returns:
- The transformation matrix of shape (num_images, 8).
-
- Raises:
- `TypeError` if
- - the shape of `translations` is not known or
- - the shape of `translations` is not rank 1 or 2.
-
- """
- translations = tf.convert_to_tensor(translations, dtype=tf.float32)
- if translations.get_shape().ndims is None:
- raise TypeError('translations rank must be statically known')
- elif len(translations.get_shape()) == 1:
- translations = translations[None]
- elif len(translations.get_shape()) != 2:
- raise TypeError('translations should have rank 1 or 2.')
- num_translations = tf.shape(translations)[0]
-
- return tf.concat(
- values=[
- tf.ones((num_translations, 1), tf.dtypes.float32),
- tf.zeros((num_translations, 1), tf.dtypes.float32),
- -translations[:, 0, None],
- tf.zeros((num_translations, 1), tf.dtypes.float32),
- tf.ones((num_translations, 1), tf.dtypes.float32),
- -translations[:, 1, None],
- tf.zeros((num_translations, 2), tf.dtypes.float32),
- ],
- axis=1,
- )
-
-
-def _convert_angles_to_transform(angles: tf.Tensor, image_width: tf.Tensor,
- image_height: tf.Tensor) -> tf.Tensor:
- """Converts an angle or angles to a projective transform.
-
- Args:
- angles: A scalar to rotate all images, or a vector to rotate a batch of
- images. This must be a scalar.
- image_width: The width of the image(s) to be transformed.
- image_height: The height of the image(s) to be transformed.
-
- Returns:
- A tensor of shape (num_images, 8).
-
- Raises:
- `TypeError` if `angles` is not rank 0 or 1.
-
- """
- angles = tf.convert_to_tensor(angles, dtype=tf.float32)
- if len(angles.get_shape()) == 0: # pylint:disable=g-explicit-length-test
- angles = angles[None]
- elif len(angles.get_shape()) != 1:
- raise TypeError('Angles should have a rank 0 or 1.')
- x_offset = ((image_width - 1) -
- (tf.math.cos(angles) * (image_width - 1) - tf.math.sin(angles) *
- (image_height - 1))) / 2.0
- y_offset = ((image_height - 1) -
- (tf.math.sin(angles) * (image_width - 1) + tf.math.cos(angles) *
- (image_height - 1))) / 2.0
- num_angles = tf.shape(angles)[0]
- return tf.concat(
- values=[
- tf.math.cos(angles)[:, None],
- -tf.math.sin(angles)[:, None],
- x_offset[:, None],
- tf.math.sin(angles)[:, None],
- tf.math.cos(angles)[:, None],
- y_offset[:, None],
- tf.zeros((num_angles, 2), tf.dtypes.float32),
- ],
- axis=1,
- )
-
-
-def transform(image: tf.Tensor, transforms) -> tf.Tensor:
- """Prepares input data for `image_ops.transform`."""
- original_ndims = tf.rank(image)
- transforms = tf.convert_to_tensor(transforms, dtype=tf.float32)
- if transforms.shape.rank == 1:
- transforms = transforms[None]
- image = to_4d(image)
- image = image_ops.transform(
- images=image, transforms=transforms, interpolation='nearest')
- return from_4d(image, original_ndims)
-
-
-def translate(image: tf.Tensor, translations) -> tf.Tensor:
- """Translates image(s) by provided vectors.
-
- Args:
- image: An image Tensor of type uint8.
- translations: A vector or matrix representing [dx dy].
-
- Returns:
- The translated version of the image.
-
- """
- transforms = _convert_translation_to_transform(translations)
- return transform(image, transforms=transforms)
-
-
-def rotate(image: tf.Tensor, degrees: float) -> tf.Tensor:
- """Rotates the image by degrees either clockwise or counterclockwise.
-
- Args:
- image: An image Tensor of type uint8.
- degrees: Float, a scalar angle in degrees to rotate all images by. If
- degrees is positive the image will be rotated clockwise otherwise it will
- be rotated counterclockwise.
-
- Returns:
- The rotated version of image.
-
- """
- # Convert from degrees to radians.
- degrees_to_radians = math.pi / 180.0
- radians = tf.cast(degrees * degrees_to_radians, tf.float32)
-
- original_ndims = tf.rank(image)
- image = to_4d(image)
-
- image_height = tf.cast(tf.shape(image)[1], tf.float32)
- image_width = tf.cast(tf.shape(image)[2], tf.float32)
- transforms = _convert_angles_to_transform(
- angles=radians, image_width=image_width, image_height=image_height)
- # In practice, we should randomize the rotation degrees by flipping
- # it negatively half the time, but that's done on 'degrees' outside
- # of the function.
- image = transform(image, transforms=transforms)
- return from_4d(image, original_ndims)
-
-
-def blend(image1: tf.Tensor, image2: tf.Tensor, factor: float) -> tf.Tensor:
- """Blend image1 and image2 using 'factor'.
-
- Factor can be above 0.0. A value of 0.0 means only image1 is used.
- A value of 1.0 means only image2 is used. A value between 0.0 and
- 1.0 means we linearly interpolate the pixel values between the two
- images. A value greater than 1.0 "extrapolates" the difference
- between the two pixel values, and we clip the results to values
- between 0 and 255.
-
- Args:
- image1: An image Tensor of type uint8.
- image2: An image Tensor of type uint8.
- factor: A floating point value above 0.0.
-
- Returns:
- A blended image Tensor of type uint8.
- """
- if factor == 0.0:
- return tf.convert_to_tensor(image1)
- if factor == 1.0:
- return tf.convert_to_tensor(image2)
-
- image1 = tf.cast(image1, tf.float32)
- image2 = tf.cast(image2, tf.float32)
-
- difference = image2 - image1
- scaled = factor * difference
-
- # Do addition in float.
- temp = tf.cast(image1, tf.float32) + scaled
-
- # Interpolate
- if factor > 0.0 and factor < 1.0:
- # Interpolation means we always stay within 0 and 255.
- return tf.cast(temp, tf.uint8)
-
- # Extrapolate:
- #
- # We need to clip and then cast.
- return tf.cast(tf.clip_by_value(temp, 0.0, 255.0), tf.uint8)
-
-
-def cutout(image: tf.Tensor, pad_size: int, replace: int = 0) -> tf.Tensor:
- """Apply cutout (https://arxiv.org/abs/1708.04552) to image.
-
- This operation applies a (2*pad_size x 2*pad_size) mask of zeros to
- a random location within `image`. The pixel values filled in will be of the
- value `replace`. The location where the mask will be applied is randomly
- chosen uniformly over the whole image.
-
- Args:
- image: An image Tensor of type uint8.
- pad_size: Specifies how big the zero mask that will be generated is that is
- applied to the image. The mask will be of size (2*pad_size x 2*pad_size).
- replace: What pixel value to fill in the image in the area that has the
- cutout mask applied to it.
-
- Returns:
- An image Tensor that is of type uint8.
- """
- if image.shape.rank not in [3, 4]:
- raise ValueError('Bad image rank: {}'.format(image.shape.rank))
-
- if image.shape.rank == 4:
- return cutout_video(image, replace=replace)
-
- image_height = tf.shape(image)[0]
- image_width = tf.shape(image)[1]
-
- # Sample the center location in the image where the zero mask will be applied.
- cutout_center_height = tf.random.uniform(
- shape=[], minval=0, maxval=image_height, dtype=tf.int32)
-
- cutout_center_width = tf.random.uniform(
- shape=[], minval=0, maxval=image_width, dtype=tf.int32)
-
- image = _fill_rectangle(image, cutout_center_width, cutout_center_height,
- pad_size, pad_size, replace)
-
- return image
-
-
-def _fill_rectangle(image,
- center_width,
- center_height,
- half_width,
- half_height,
- replace=None):
- """Fill blank area."""
- image_height = tf.shape(image)[0]
- image_width = tf.shape(image)[1]
-
- lower_pad = tf.maximum(0, center_height - half_height)
- upper_pad = tf.maximum(0, image_height - center_height - half_height)
- left_pad = tf.maximum(0, center_width - half_width)
- right_pad = tf.maximum(0, image_width - center_width - half_width)
-
- cutout_shape = [
- image_height - (lower_pad + upper_pad),
- image_width - (left_pad + right_pad)
- ]
- padding_dims = [[lower_pad, upper_pad], [left_pad, right_pad]]
- mask = tf.pad(
- tf.zeros(cutout_shape, dtype=image.dtype),
- padding_dims,
- constant_values=1)
- mask = tf.expand_dims(mask, -1)
- mask = tf.tile(mask, [1, 1, 3])
-
- if replace is None:
- fill = tf.random.normal(tf.shape(image), dtype=image.dtype)
- elif isinstance(replace, tf.Tensor):
- fill = replace
- else:
- fill = tf.ones_like(image, dtype=image.dtype) * replace
- image = tf.where(tf.equal(mask, 0), fill, image)
-
- return image
-
-
-def cutout_video(image: tf.Tensor, replace: int = 0) -> tf.Tensor:
- """Apply cutout (https://arxiv.org/abs/1708.04552) to a video.
-
- This operation applies a random size 3D mask of zeros to a random location
- within `image`. The mask is padded The pixel values filled in will be of the
- value `replace`. The location where the mask will be applied is randomly
- chosen uniformly over the whole image. The size of the mask is randomly
- sampled uniformly from [0.25*height, 0.5*height], [0.25*width, 0.5*width],
- and [1, 0.25*depth], which represent the height, width, and number of frames
- of the input video tensor respectively.
-
- Args:
- image: A video Tensor of type uint8.
- replace: What pixel value to fill in the image in the area that has the
- cutout mask applied to it.
-
- Returns:
- An video Tensor that is of type uint8.
- """
- image_depth = tf.shape(image)[0]
- image_height = tf.shape(image)[1]
- image_width = tf.shape(image)[2]
-
- # Sample the center location in the image where the zero mask will be applied.
- cutout_center_height = tf.random.uniform(
- shape=[], minval=0, maxval=image_height, dtype=tf.int32)
-
- cutout_center_width = tf.random.uniform(
- shape=[], minval=0, maxval=image_width, dtype=tf.int32)
-
- cutout_center_depth = tf.random.uniform(
- shape=[], minval=0, maxval=image_depth, dtype=tf.int32)
-
- pad_size_height = tf.random.uniform(
- shape=[],
- minval=tf.maximum(1, tf.cast(image_height / 4, tf.int32)),
- maxval=tf.maximum(2, tf.cast(image_height / 2, tf.int32)),
- dtype=tf.int32)
- pad_size_width = tf.random.uniform(
- shape=[],
- minval=tf.maximum(1, tf.cast(image_width / 4, tf.int32)),
- maxval=tf.maximum(2, tf.cast(image_width / 2, tf.int32)),
- dtype=tf.int32)
- pad_size_depth = tf.random.uniform(
- shape=[],
- minval=1,
- maxval=tf.maximum(2, tf.cast(image_depth / 4, tf.int32)),
- dtype=tf.int32)
-
- lower_pad = tf.maximum(0, cutout_center_height - pad_size_height)
- upper_pad = tf.maximum(
- 0, image_height - cutout_center_height - pad_size_height)
- left_pad = tf.maximum(0, cutout_center_width - pad_size_width)
- right_pad = tf.maximum(0, image_width - cutout_center_width - pad_size_width)
- back_pad = tf.maximum(0, cutout_center_depth - pad_size_depth)
- forward_pad = tf.maximum(
- 0, image_depth - cutout_center_depth - pad_size_depth)
-
- cutout_shape = [
- image_depth - (back_pad + forward_pad),
- image_height - (lower_pad + upper_pad),
- image_width - (left_pad + right_pad),
- ]
- padding_dims = [[back_pad, forward_pad],
- [lower_pad, upper_pad],
- [left_pad, right_pad]]
- mask = tf.pad(
- tf.zeros(cutout_shape, dtype=image.dtype),
- padding_dims,
- constant_values=1)
- mask = tf.expand_dims(mask, -1)
- mask = tf.tile(mask, [1, 1, 1, 3])
- image = tf.where(
- tf.equal(mask, 0),
- tf.ones_like(image, dtype=image.dtype) * replace, image)
- return image
-
-
-def solarize(image: tf.Tensor, threshold: int = 128) -> tf.Tensor:
- """Solarize the input image(s)."""
- # For each pixel in the image, select the pixel
- # if the value is less than the threshold.
- # Otherwise, subtract 255 from the pixel.
- return tf.where(image < threshold, image, 255 - image)
-
-
-def solarize_add(image: tf.Tensor,
- addition: int = 0,
- threshold: int = 128) -> tf.Tensor:
- """Additive solarize the input image(s)."""
- # For each pixel in the image less than threshold
- # we add 'addition' amount to it and then clip the
- # pixel value to be between 0 and 255. The value
- # of 'addition' is between -128 and 128.
- added_image = tf.cast(image, tf.int64) + addition
- added_image = tf.cast(tf.clip_by_value(added_image, 0, 255), tf.uint8)
- return tf.where(image < threshold, added_image, image)
-
-
-def color(image: tf.Tensor, factor: float) -> tf.Tensor:
- """Equivalent of PIL Color."""
- degenerate = tf.image.grayscale_to_rgb(tf.image.rgb_to_grayscale(image))
- return blend(degenerate, image, factor)
-
-
-def contrast(image: tf.Tensor, factor: float) -> tf.Tensor:
- """Equivalent of PIL Contrast."""
- degenerate = tf.image.rgb_to_grayscale(image)
- # Cast before calling tf.histogram.
- degenerate = tf.cast(degenerate, tf.int32)
-
- # Compute the grayscale histogram, then compute the mean pixel value,
- # and create a constant image size of that value. Use that as the
- # blending degenerate target of the original image.
- hist = tf.histogram_fixed_width(degenerate, [0, 255], nbins=256)
- mean = tf.reduce_sum(tf.cast(hist, tf.float32)) / 256.0
- degenerate = tf.ones_like(degenerate, dtype=tf.float32) * mean
- degenerate = tf.clip_by_value(degenerate, 0.0, 255.0)
- degenerate = tf.image.grayscale_to_rgb(tf.cast(degenerate, tf.uint8))
- return blend(degenerate, image, factor)
-
-
-def brightness(image: tf.Tensor, factor: float) -> tf.Tensor:
- """Equivalent of PIL Brightness."""
- degenerate = tf.zeros_like(image)
- return blend(degenerate, image, factor)
-
-
-def posterize(image: tf.Tensor, bits: int) -> tf.Tensor:
- """Equivalent of PIL Posterize."""
- shift = 8 - bits
- return tf.bitwise.left_shift(tf.bitwise.right_shift(image, shift), shift)
-
-
-def wrapped_rotate(image: tf.Tensor, degrees: float, replace: int) -> tf.Tensor:
- """Applies rotation with wrap/unwrap."""
- image = rotate(wrap(image), degrees=degrees)
- return unwrap(image, replace)
-
-
-def translate_x(image: tf.Tensor, pixels: int, replace: int) -> tf.Tensor:
- """Equivalent of PIL Translate in X dimension."""
- image = translate(wrap(image), [-pixels, 0])
- return unwrap(image, replace)
-
-
-def translate_y(image: tf.Tensor, pixels: int, replace: int) -> tf.Tensor:
- """Equivalent of PIL Translate in Y dimension."""
- image = translate(wrap(image), [0, -pixels])
- return unwrap(image, replace)
-
-
-def shear_x(image: tf.Tensor, level: float, replace: int) -> tf.Tensor:
- """Equivalent of PIL Shearing in X dimension."""
- # Shear parallel to x axis is a projective transform
- # with a matrix form of:
- # [1 level
- # 0 1].
- image = transform(
- image=wrap(image), transforms=[1., level, 0., 0., 1., 0., 0., 0.])
- return unwrap(image, replace)
-
-
-def shear_y(image: tf.Tensor, level: float, replace: int) -> tf.Tensor:
- """Equivalent of PIL Shearing in Y dimension."""
- # Shear parallel to y axis is a projective transform
- # with a matrix form of:
- # [1 0
- # level 1].
- image = transform(
- image=wrap(image), transforms=[1., 0., 0., level, 1., 0., 0., 0.])
- return unwrap(image, replace)
-
-
-def autocontrast(image: tf.Tensor) -> tf.Tensor:
- """Implements Autocontrast function from PIL using TF ops.
-
- Args:
- image: A 3D uint8 tensor.
-
- Returns:
- The image after it has had autocontrast applied to it and will be of type
- uint8.
- """
-
- def scale_channel(image: tf.Tensor) -> tf.Tensor:
- """Scale the 2D image using the autocontrast rule."""
- # A possibly cheaper version can be done using cumsum/unique_with_counts
- # over the histogram values, rather than iterating over the entire image.
- # to compute mins and maxes.
- lo = tf.cast(tf.reduce_min(image), tf.float32)
- hi = tf.cast(tf.reduce_max(image), tf.float32)
-
- # Scale the image, making the lowest value 0 and the highest value 255.
- def scale_values(im):
- scale = 255.0 / (hi - lo)
- offset = -lo * scale
- im = tf.cast(im, tf.float32) * scale + offset
- im = tf.clip_by_value(im, 0.0, 255.0)
- return tf.cast(im, tf.uint8)
-
- result = tf.cond(hi > lo, lambda: scale_values(image), lambda: image)
- return result
-
- # Assumes RGB for now. Scales each channel independently
- # and then stacks the result.
- s1 = scale_channel(image[..., 0])
- s2 = scale_channel(image[..., 1])
- s3 = scale_channel(image[..., 2])
- image = tf.stack([s1, s2, s3], -1)
-
- return image
-
-
-def sharpness(image: tf.Tensor, factor: float) -> tf.Tensor:
- """Implements Sharpness function from PIL using TF ops."""
- orig_image = image
- image = tf.cast(image, tf.float32)
- # Make image 4D for conv operation.
- image = tf.expand_dims(image, 0)
- # SMOOTH PIL Kernel.
- if orig_image.shape.rank == 3:
- kernel = tf.constant([[1, 1, 1], [1, 5, 1], [1, 1, 1]],
- dtype=tf.float32,
- shape=[3, 3, 1, 1]) / 13.
- # Tile across channel dimension.
- kernel = tf.tile(kernel, [1, 1, 3, 1])
- strides = [1, 1, 1, 1]
- degenerate = tf.nn.depthwise_conv2d(
- image, kernel, strides, padding='VALID', dilations=[1, 1])
- elif orig_image.shape.rank == 4:
- kernel = tf.constant([[1, 1, 1], [1, 5, 1], [1, 1, 1]],
- dtype=tf.float32,
- shape=[1, 3, 3, 1, 1]) / 13.
- strides = [1, 1, 1, 1, 1]
- # Run the kernel across each channel
- channels = tf.split(image, 3, axis=-1)
- degenerates = [
- tf.nn.conv3d(channel, kernel, strides, padding='VALID',
- dilations=[1, 1, 1, 1, 1])
- for channel in channels
- ]
- degenerate = tf.concat(degenerates, -1)
- else:
- raise ValueError('Bad image rank: {}'.format(image.shape.rank))
- degenerate = tf.clip_by_value(degenerate, 0.0, 255.0)
- degenerate = tf.squeeze(tf.cast(degenerate, tf.uint8), [0])
-
- # For the borders of the resulting image, fill in the values of the
- # original image.
- mask = tf.ones_like(degenerate)
- paddings = [[0, 0]] * (orig_image.shape.rank - 3)
- padded_mask = tf.pad(mask, paddings + [[1, 1], [1, 1], [0, 0]])
- padded_degenerate = tf.pad(degenerate, paddings + [[1, 1], [1, 1], [0, 0]])
- result = tf.where(tf.equal(padded_mask, 1), padded_degenerate, orig_image)
-
- # Blend the final result.
- return blend(result, orig_image, factor)
-
-
-def equalize(image: tf.Tensor) -> tf.Tensor:
- """Implements Equalize function from PIL using TF ops."""
-
- def scale_channel(im, c):
- """Scale the data in the channel to implement equalize."""
- im = tf.cast(im[..., c], tf.int32)
- # Compute the histogram of the image channel.
- histo = tf.histogram_fixed_width(im, [0, 255], nbins=256)
-
- # For the purposes of computing the step, filter out the nonzeros.
- nonzero = tf.where(tf.not_equal(histo, 0))
- nonzero_histo = tf.reshape(tf.gather(histo, nonzero), [-1])
- step = (tf.reduce_sum(nonzero_histo) - nonzero_histo[-1]) // 255
-
- def build_lut(histo, step):
- # Compute the cumulative sum, shifting by step // 2
- # and then normalization by step.
- lut = (tf.cumsum(histo) + (step // 2)) // step
- # Shift lut, prepending with 0.
- lut = tf.concat([[0], lut[:-1]], 0)
- # Clip the counts to be in range. This is done
- # in the C code for image.point.
- return tf.clip_by_value(lut, 0, 255)
-
- # If step is zero, return the original image. Otherwise, build
- # lut from the full histogram and step and then index from it.
- result = tf.cond(
- tf.equal(step, 0), lambda: im,
- lambda: tf.gather(build_lut(histo, step), im))
-
- return tf.cast(result, tf.uint8)
-
- # Assumes RGB for now. Scales each channel independently
- # and then stacks the result.
- s1 = scale_channel(image, 0)
- s2 = scale_channel(image, 1)
- s3 = scale_channel(image, 2)
- image = tf.stack([s1, s2, s3], -1)
- return image
-
-
-def invert(image: tf.Tensor) -> tf.Tensor:
- """Inverts the image pixels."""
- image = tf.convert_to_tensor(image)
- return 255 - image
-
-
-def wrap(image: tf.Tensor) -> tf.Tensor:
- """Returns 'image' with an extra channel set to all 1s."""
- shape = tf.shape(image)
- extended_channel = tf.expand_dims(tf.ones(shape[:-1], image.dtype), -1)
- extended = tf.concat([image, extended_channel], axis=-1)
- return extended
-
-
-def unwrap(image: tf.Tensor, replace: int) -> tf.Tensor:
- """Unwraps an image produced by wrap.
-
- Where there is a 0 in the last channel for every spatial position,
- the rest of the three channels in that spatial dimension are grayed
- (set to 128). Operations like translate and shear on a wrapped
- Tensor will leave 0s in empty locations. Some transformations look
- at the intensity of values to do preprocessing, and we want these
- empty pixels to assume the 'average' value, rather than pure black.
-
-
- Args:
- image: A 3D Image Tensor with 4 channels.
- replace: A one or three value 1D tensor to fill empty pixels.
-
- Returns:
- image: A 3D image Tensor with 3 channels.
- """
- image_shape = tf.shape(image)
- # Flatten the spatial dimensions.
- flattened_image = tf.reshape(image, [-1, image_shape[-1]])
-
- # Find all pixels where the last channel is zero.
- alpha_channel = tf.expand_dims(flattened_image[..., 3], axis=-1)
-
- replace = tf.concat([replace, tf.ones([1], image.dtype)], 0)
-
- # Where they are zero, fill them in with 'replace'.
- flattened_image = tf.where(
- tf.equal(alpha_channel, 0),
- tf.ones_like(flattened_image, dtype=image.dtype) * replace,
- flattened_image)
-
- image = tf.reshape(flattened_image, image_shape)
- image = tf.slice(
- image,
- [0] * image.shape.rank,
- tf.concat([image_shape[:-1], [3]], -1))
- return image
-
-
-def _scale_bbox_only_op_probability(prob):
- """Reduce the probability of the bbox-only operation.
-
- Probability is reduced so that we do not distort the content of too many
- bounding boxes that are close to each other. The value of 3.0 was a chosen
- hyper parameter when designing the autoaugment algorithm that we found
- empirically to work well.
-
- Args:
- prob: Float that is the probability of applying the bbox-only operation.
-
- Returns:
- Reduced probability.
- """
- return prob / 3.0
-
-
-def _apply_bbox_augmentation(image, bbox, augmentation_func, *args):
- """Applies augmentation_func to the subsection of image indicated by bbox.
-
- Args:
- image: 3D uint8 Tensor.
- bbox: 1D Tensor that has 4 elements (min_y, min_x, max_y, max_x)
- of type float that represents the normalized coordinates between 0 and 1.
- augmentation_func: Augmentation function that will be applied to the
- subsection of image.
- *args: Additional parameters that will be passed into augmentation_func
- when it is called.
-
- Returns:
- A modified version of image, where the bbox location in the image will
- have `ugmentation_func applied to it.
- """
- image_height = tf.cast(tf.shape(image)[0], tf.float32)
- image_width = tf.cast(tf.shape(image)[1], tf.float32)
- min_y = tf.cast(image_height * bbox[0], tf.int32)
- min_x = tf.cast(image_width * bbox[1], tf.int32)
- max_y = tf.cast(image_height * bbox[2], tf.int32)
- max_x = tf.cast(image_width * bbox[3], tf.int32)
- image_height = tf.cast(image_height, tf.int32)
- image_width = tf.cast(image_width, tf.int32)
-
- # Clip to be sure the max values do not fall out of range.
- max_y = tf.minimum(max_y, image_height - 1)
- max_x = tf.minimum(max_x, image_width - 1)
-
- # Get the sub-tensor that is the image within the bounding box region.
- bbox_content = image[min_y:max_y + 1, min_x:max_x + 1, :]
-
- # Apply the augmentation function to the bbox portion of the image.
- augmented_bbox_content = augmentation_func(bbox_content, *args)
-
- # Pad the augmented_bbox_content and the mask to match the shape of original
- # image.
- augmented_bbox_content = tf.pad(augmented_bbox_content,
- [[min_y, (image_height - 1) - max_y],
- [min_x, (image_width - 1) - max_x],
- [0, 0]])
-
- # Create a mask that will be used to zero out a part of the original image.
- mask_tensor = tf.zeros_like(bbox_content)
-
- mask_tensor = tf.pad(mask_tensor,
- [[min_y, (image_height - 1) - max_y],
- [min_x, (image_width - 1) - max_x],
- [0, 0]],
- constant_values=1)
- # Replace the old bbox content with the new augmented content.
- image = image * mask_tensor + augmented_bbox_content
- return image
-
-
-def _concat_bbox(bbox, bboxes):
- """Helper function that concates bbox to bboxes along the first dimension."""
-
- # Note if all elements in bboxes are -1 (_INVALID_BOX), then this means
- # we discard bboxes and start the bboxes Tensor with the current bbox.
- bboxes_sum_check = tf.reduce_sum(bboxes)
- bbox = tf.expand_dims(bbox, 0)
- # This check will be true when it is an _INVALID_BOX
- bboxes = tf.cond(tf.equal(bboxes_sum_check, -4.0),
- lambda: bbox,
- lambda: tf.concat([bboxes, bbox], 0))
- return bboxes
-
-
-def _apply_bbox_augmentation_wrapper(image, bbox, new_bboxes, prob,
- augmentation_func, func_changes_bbox,
- *args):
- """Applies _apply_bbox_augmentation with probability prob.
-
- Args:
- image: 3D uint8 Tensor.
- bbox: 1D Tensor that has 4 elements (min_y, min_x, max_y, max_x)
- of type float that represents the normalized coordinates between 0 and 1.
- new_bboxes: 2D Tensor that is a list of the bboxes in the image after they
- have been altered by aug_func. These will only be changed when
- func_changes_bbox is set to true. Each bbox has 4 elements
- (min_y, min_x, max_y, max_x) of type float that are the normalized
- bbox coordinates between 0 and 1.
- prob: Float that is the probability of applying _apply_bbox_augmentation.
- augmentation_func: Augmentation function that will be applied to the
- subsection of image.
- func_changes_bbox: Boolean. Does augmentation_func return bbox in addition
- to image.
- *args: Additional parameters that will be passed into augmentation_func
- when it is called.
-
- Returns:
- A tuple. Fist element is a modified version of image, where the bbox
- location in the image will have augmentation_func applied to it if it is
- chosen to be called with probability `prob`. The second element is a
- Tensor of Tensors of length 4 that will contain the altered bbox after
- applying augmentation_func.
- """
- should_apply_op = tf.cast(
- tf.floor(tf.random.uniform([], dtype=tf.float32) + prob), tf.bool)
- if func_changes_bbox:
- augmented_image, bbox = tf.cond(
- should_apply_op,
- lambda: augmentation_func(image, bbox, *args),
- lambda: (image, bbox))
- else:
- augmented_image = tf.cond(
- should_apply_op,
- lambda: _apply_bbox_augmentation(image, bbox, augmentation_func, *args),
- lambda: image)
- new_bboxes = _concat_bbox(bbox, new_bboxes)
- return augmented_image, new_bboxes
-
-
-def _apply_multi_bbox_augmentation_wrapper(image, bboxes, prob, aug_func,
- func_changes_bbox, *args):
- """Checks to be sure num bboxes > 0 before calling inner function."""
- num_bboxes = tf.shape(bboxes)[0]
- image, bboxes = tf.cond(
- tf.equal(num_bboxes, 0),
- lambda: (image, bboxes),
- # pylint:disable=g-long-lambda
- lambda: _apply_multi_bbox_augmentation(
- image, bboxes, prob, aug_func, func_changes_bbox, *args))
- # pylint:enable=g-long-lambda
- return image, bboxes
-
-
-# Represents an invalid bounding box that is used for checking for padding
-# lists of bounding box coordinates for a few augmentation operations
-_INVALID_BOX = [[-1.0, -1.0, -1.0, -1.0]]
-
-
-def _apply_multi_bbox_augmentation(image, bboxes, prob, aug_func,
- func_changes_bbox, *args):
- """Applies aug_func to the image for each bbox in bboxes.
-
- Args:
- image: 3D uint8 Tensor.
- bboxes: 2D Tensor that is a list of the bboxes in the image. Each bbox
- has 4 elements (min_y, min_x, max_y, max_x) of type float.
- prob: Float that is the probability of applying aug_func to a specific
- bounding box within the image.
- aug_func: Augmentation function that will be applied to the
- subsections of image indicated by the bbox values in bboxes.
- func_changes_bbox: Boolean. Does augmentation_func return bbox in addition
- to image.
- *args: Additional parameters that will be passed into augmentation_func
- when it is called.
-
- Returns:
- A modified version of image, where each bbox location in the image will
- have augmentation_func applied to it if it is chosen to be called with
- probability prob independently across all bboxes. Also the final
- bboxes are returned that will be unchanged if func_changes_bbox is set to
- false and if true, the new altered ones will be returned.
-
- Raises:
- ValueError if applied to video.
- """
- if image.shape.rank == 4:
- raise ValueError('Image rank 4 is not supported')
-
- # Will keep track of the new altered bboxes after aug_func is repeatedly
- # applied. The -1 values are a dummy value and this first Tensor will be
- # removed upon appending the first real bbox.
- new_bboxes = tf.constant(_INVALID_BOX)
-
- # If the bboxes are empty, then just give it _INVALID_BOX. The result
- # will be thrown away.
- bboxes = tf.cond(tf.equal(tf.size(bboxes), 0),
- lambda: tf.constant(_INVALID_BOX),
- lambda: bboxes)
-
- bboxes = tf.ensure_shape(bboxes, (None, 4))
-
- # pylint:disable=g-long-lambda
- wrapped_aug_func = (
- lambda _image, bbox, _new_bboxes: _apply_bbox_augmentation_wrapper(
- _image, bbox, _new_bboxes, prob, aug_func, func_changes_bbox, *args))
- # pylint:enable=g-long-lambda
-
- # Setup the while_loop.
- num_bboxes = tf.shape(bboxes)[0] # We loop until we go over all bboxes.
- idx = tf.constant(0) # Counter for the while loop.
-
- # Conditional function when to end the loop once we go over all bboxes
- # images_and_bboxes contain (_image, _new_bboxes)
- cond = lambda _idx, _images_and_bboxes: tf.less(_idx, num_bboxes)
-
- # Shuffle the bboxes so that the augmentation order is not deterministic if
- # we are not changing the bboxes with aug_func.
- if not func_changes_bbox:
- loop_bboxes = tf.random.shuffle(bboxes)
- else:
- loop_bboxes = bboxes
-
- # Main function of while_loop where we repeatedly apply augmentation on the
- # bboxes in the image.
- # pylint:disable=g-long-lambda
- body = lambda _idx, _images_and_bboxes: [
- _idx + 1, wrapped_aug_func(_images_and_bboxes[0],
- loop_bboxes[_idx],
- _images_and_bboxes[1])]
- # pylint:enable=g-long-lambda
-
- _, (image, new_bboxes) = tf.while_loop(
- cond, body, [idx, (image, new_bboxes)],
- shape_invariants=[idx.get_shape(),
- (image.get_shape(), tf.TensorShape([None, 4]))])
-
- # Either return the altered bboxes or the original ones depending on if
- # we altered them in anyway.
- if func_changes_bbox:
- final_bboxes = new_bboxes
- else:
- final_bboxes = bboxes
- return image, final_bboxes
-
-
-def _clip_bbox(min_y, min_x, max_y, max_x):
- """Clip bounding box coordinates between 0 and 1.
-
- Args:
- min_y: Normalized bbox coordinate of type float between 0 and 1.
- min_x: Normalized bbox coordinate of type float between 0 and 1.
- max_y: Normalized bbox coordinate of type float between 0 and 1.
- max_x: Normalized bbox coordinate of type float between 0 and 1.
-
- Returns:
- Clipped coordinate values between 0 and 1.
- """
- min_y = tf.clip_by_value(min_y, 0.0, 1.0)
- min_x = tf.clip_by_value(min_x, 0.0, 1.0)
- max_y = tf.clip_by_value(max_y, 0.0, 1.0)
- max_x = tf.clip_by_value(max_x, 0.0, 1.0)
- return min_y, min_x, max_y, max_x
-
-
-def _check_bbox_area(min_y, min_x, max_y, max_x, delta=0.05):
- """Adjusts bbox coordinates to make sure the area is > 0.
-
- Args:
- min_y: Normalized bbox coordinate of type float between 0 and 1.
- min_x: Normalized bbox coordinate of type float between 0 and 1.
- max_y: Normalized bbox coordinate of type float between 0 and 1.
- max_x: Normalized bbox coordinate of type float between 0 and 1.
- delta: Float, this is used to create a gap of size 2 * delta between
- bbox min/max coordinates that are the same on the boundary.
- This prevents the bbox from having an area of zero.
-
- Returns:
- Tuple of new bbox coordinates between 0 and 1 that will now have a
- guaranteed area > 0.
- """
- height = max_y - min_y
- width = max_x - min_x
- def _adjust_bbox_boundaries(min_coord, max_coord):
- # Make sure max is never 0 and min is never 1.
- max_coord = tf.maximum(max_coord, 0.0 + delta)
- min_coord = tf.minimum(min_coord, 1.0 - delta)
- return min_coord, max_coord
- min_y, max_y = tf.cond(tf.equal(height, 0.0),
- lambda: _adjust_bbox_boundaries(min_y, max_y),
- lambda: (min_y, max_y))
- min_x, max_x = tf.cond(tf.equal(width, 0.0),
- lambda: _adjust_bbox_boundaries(min_x, max_x),
- lambda: (min_x, max_x))
- return min_y, min_x, max_y, max_x
-
-
-def _rotate_bbox(bbox, image_height, image_width, degrees):
- """Rotates the bbox coordinated by degrees.
-
- Args:
- bbox: 1D Tensor that has 4 elements (min_y, min_x, max_y, max_x)
- of type float that represents the normalized coordinates between 0 and 1.
- image_height: Int, height of the image.
- image_width: Int, height of the image.
- degrees: Float, a scalar angle in degrees to rotate all images by. If
- degrees is positive the image will be rotated clockwise otherwise it will
- be rotated counterclockwise.
-
- Returns:
- A tensor of the same shape as bbox, but now with the rotated coordinates.
- """
- image_height, image_width = (
- tf.cast(image_height, tf.float32), tf.cast(image_width, tf.float32))
-
- # Convert from degrees to radians.
- degrees_to_radians = math.pi / 180.0
- radians = degrees * degrees_to_radians
-
- # Translate the bbox to the center of the image and turn the normalized 0-1
- # coordinates to absolute pixel locations.
- # Y coordinates are made negative as the y axis of images goes down with
- # increasing pixel values, so we negate to make sure x axis and y axis points
- # are in the traditionally positive direction.
- min_y = -tf.cast(image_height * (bbox[0] - 0.5), tf.int32)
- min_x = tf.cast(image_width * (bbox[1] - 0.5), tf.int32)
- max_y = -tf.cast(image_height * (bbox[2] - 0.5), tf.int32)
- max_x = tf.cast(image_width * (bbox[3] - 0.5), tf.int32)
- coordinates = tf.stack(
- [[min_y, min_x], [min_y, max_x], [max_y, min_x], [max_y, max_x]])
- coordinates = tf.cast(coordinates, tf.float32)
- # Rotate the coordinates according to the rotation matrix clockwise if
- # radians is positive, else negative
- rotation_matrix = tf.stack(
- [[tf.cos(radians), tf.sin(radians)],
- [-tf.sin(radians), tf.cos(radians)]])
- new_coords = tf.cast(
- tf.matmul(rotation_matrix, tf.transpose(coordinates)), tf.int32)
- # Find min/max values and convert them back to normalized 0-1 floats.
- min_y = -(
- tf.cast(tf.reduce_max(new_coords[0, :]), tf.float32) / image_height - 0.5)
- min_x = tf.cast(tf.reduce_min(new_coords[1, :]),
- tf.float32) / image_width + 0.5
- max_y = -(
- tf.cast(tf.reduce_min(new_coords[0, :]), tf.float32) / image_height - 0.5)
- max_x = tf.cast(tf.reduce_max(new_coords[1, :]),
- tf.float32) / image_width + 0.5
-
- # Clip the bboxes to be sure the fall between [0, 1].
- min_y, min_x, max_y, max_x = _clip_bbox(min_y, min_x, max_y, max_x)
- min_y, min_x, max_y, max_x = _check_bbox_area(min_y, min_x, max_y, max_x)
- return tf.stack([min_y, min_x, max_y, max_x])
-
-
-def rotate_with_bboxes(image, bboxes, degrees, replace):
- """Equivalent of PIL Rotate that rotates the image and bbox.
-
- Args:
- image: 3D uint8 Tensor.
- bboxes: 2D Tensor that is a list of the bboxes in the image. Each bbox
- has 4 elements (min_y, min_x, max_y, max_x) of type float.
- degrees: Float, a scalar angle in degrees to rotate all images by. If
- degrees is positive the image will be rotated clockwise otherwise it will
- be rotated counterclockwise.
- replace: A one or three value 1D tensor to fill empty pixels.
-
- Returns:
- A tuple containing a 3D uint8 Tensor that will be the result of rotating
- image by degrees. The second element of the tuple is bboxes, where now
- the coordinates will be shifted to reflect the rotated image.
-
- Raises:
- ValueError: If applied to video.
- """
- if image.shape.rank == 4:
- raise ValueError('Image rank 4 is not supported')
-
- # Rotate the image.
- image = wrapped_rotate(image, degrees, replace)
-
- # Convert bbox coordinates to pixel values.
- image_height = tf.shape(image)[0]
- image_width = tf.shape(image)[1]
- # pylint:disable=g-long-lambda
- wrapped_rotate_bbox = lambda bbox: _rotate_bbox(
- bbox, image_height, image_width, degrees)
- # pylint:enable=g-long-lambda
- bboxes = tf.map_fn(wrapped_rotate_bbox, bboxes)
- return image, bboxes
-
-
-def _shear_bbox(bbox, image_height, image_width, level, shear_horizontal):
- """Shifts the bbox according to how the image was sheared.
-
- Args:
- bbox: 1D Tensor that has 4 elements (min_y, min_x, max_y, max_x)
- of type float that represents the normalized coordinates between 0 and 1.
- image_height: Int, height of the image.
- image_width: Int, height of the image.
- level: Float. How much to shear the image.
- shear_horizontal: If true then shear in X dimension else shear in
- the Y dimension.
-
- Returns:
- A tensor of the same shape as bbox, but now with the shifted coordinates.
- """
- image_height, image_width = (
- tf.cast(image_height, tf.float32), tf.cast(image_width, tf.float32))
-
- # Change bbox coordinates to be pixels.
- min_y = tf.cast(image_height * bbox[0], tf.int32)
- min_x = tf.cast(image_width * bbox[1], tf.int32)
- max_y = tf.cast(image_height * bbox[2], tf.int32)
- max_x = tf.cast(image_width * bbox[3], tf.int32)
- coordinates = tf.stack(
- [[min_y, min_x], [min_y, max_x], [max_y, min_x], [max_y, max_x]])
- coordinates = tf.cast(coordinates, tf.float32)
-
- # Shear the coordinates according to the translation matrix.
- if shear_horizontal:
- translation_matrix = tf.stack(
- [[1, 0], [-level, 1]])
- else:
- translation_matrix = tf.stack(
- [[1, -level], [0, 1]])
- translation_matrix = tf.cast(translation_matrix, tf.float32)
- new_coords = tf.cast(
- tf.matmul(translation_matrix, tf.transpose(coordinates)), tf.int32)
-
- # Find min/max values and convert them back to floats.
- min_y = tf.cast(tf.reduce_min(new_coords[0, :]), tf.float32) / image_height
- min_x = tf.cast(tf.reduce_min(new_coords[1, :]), tf.float32) / image_width
- max_y = tf.cast(tf.reduce_max(new_coords[0, :]), tf.float32) / image_height
- max_x = tf.cast(tf.reduce_max(new_coords[1, :]), tf.float32) / image_width
-
- # Clip the bboxes to be sure the fall between [0, 1].
- min_y, min_x, max_y, max_x = _clip_bbox(min_y, min_x, max_y, max_x)
- min_y, min_x, max_y, max_x = _check_bbox_area(min_y, min_x, max_y, max_x)
- return tf.stack([min_y, min_x, max_y, max_x])
-
-
-def shear_with_bboxes(image, bboxes, level, replace, shear_horizontal):
- """Applies Shear Transformation to the image and shifts the bboxes.
-
- Args:
- image: 3D uint8 Tensor.
- bboxes: 2D Tensor that is a list of the bboxes in the image. Each bbox
- has 4 elements (min_y, min_x, max_y, max_x) of type float with values
- between [0, 1].
- level: Float. How much to shear the image. This value will be between
- -0.3 to 0.3.
- replace: A one or three value 1D tensor to fill empty pixels.
- shear_horizontal: Boolean. If true then shear in X dimension else shear in
- the Y dimension.
-
- Returns:
- A tuple containing a 3D uint8 Tensor that will be the result of shearing
- image by level. The second element of the tuple is bboxes, where now
- the coordinates will be shifted to reflect the sheared image.
-
- Raises:
- ValueError: If applied to video.
- """
- if image.shape.rank == 4:
- raise ValueError('Image rank 4 is not supported')
-
- if shear_horizontal:
- image = shear_x(image, level, replace)
- else:
- image = shear_y(image, level, replace)
-
- # Convert bbox coordinates to pixel values.
- image_height = tf.shape(image)[0]
- image_width = tf.shape(image)[1]
- # pylint:disable=g-long-lambda
- wrapped_shear_bbox = lambda bbox: _shear_bbox(
- bbox, image_height, image_width, level, shear_horizontal)
- # pylint:enable=g-long-lambda
- bboxes = tf.map_fn(wrapped_shear_bbox, bboxes)
- return image, bboxes
-
-
-def _shift_bbox(bbox, image_height, image_width, pixels, shift_horizontal):
- """Shifts the bbox coordinates by pixels.
-
- Args:
- bbox: 1D Tensor that has 4 elements (min_y, min_x, max_y, max_x)
- of type float that represents the normalized coordinates between 0 and 1.
- image_height: Int, height of the image.
- image_width: Int, width of the image.
- pixels: An int. How many pixels to shift the bbox.
- shift_horizontal: Boolean. If true then shift in X dimension else shift in
- Y dimension.
-
- Returns:
- A tensor of the same shape as bbox, but now with the shifted coordinates.
- """
- pixels = tf.cast(pixels, tf.int32)
- # Convert bbox to integer pixel locations.
- min_y = tf.cast(tf.cast(image_height, tf.float32) * bbox[0], tf.int32)
- min_x = tf.cast(tf.cast(image_width, tf.float32) * bbox[1], tf.int32)
- max_y = tf.cast(tf.cast(image_height, tf.float32) * bbox[2], tf.int32)
- max_x = tf.cast(tf.cast(image_width, tf.float32) * bbox[3], tf.int32)
-
- if shift_horizontal:
- min_x = tf.maximum(0, min_x - pixels)
- max_x = tf.minimum(image_width, max_x - pixels)
- else:
- min_y = tf.maximum(0, min_y - pixels)
- max_y = tf.minimum(image_height, max_y - pixels)
-
- # Convert bbox back to floats.
- min_y = tf.cast(min_y, tf.float32) / tf.cast(image_height, tf.float32)
- min_x = tf.cast(min_x, tf.float32) / tf.cast(image_width, tf.float32)
- max_y = tf.cast(max_y, tf.float32) / tf.cast(image_height, tf.float32)
- max_x = tf.cast(max_x, tf.float32) / tf.cast(image_width, tf.float32)
-
- # Clip the bboxes to be sure the fall between [0, 1].
- min_y, min_x, max_y, max_x = _clip_bbox(min_y, min_x, max_y, max_x)
- min_y, min_x, max_y, max_x = _check_bbox_area(min_y, min_x, max_y, max_x)
- return tf.stack([min_y, min_x, max_y, max_x])
-
-
-def translate_bbox(image, bboxes, pixels, replace, shift_horizontal):
- """Equivalent of PIL Translate in X/Y dimension that shifts image and bbox.
-
- Args:
- image: 3D uint8 Tensor.
- bboxes: 2D Tensor that is a list of the bboxes in the image. Each bbox
- has 4 elements (min_y, min_x, max_y, max_x) of type float with values
- between [0, 1].
- pixels: An int. How many pixels to shift the image and bboxes
- replace: A one or three value 1D tensor to fill empty pixels.
- shift_horizontal: Boolean. If true then shift in X dimension else shift in
- Y dimension.
-
- Returns:
- A tuple containing a 3D uint8 Tensor that will be the result of translating
- image by pixels. The second element of the tuple is bboxes, where now
- the coordinates will be shifted to reflect the shifted image.
-
- Raises:
- ValueError if applied to video.
- """
- if image.shape.rank == 4:
- raise ValueError('Image rank 4 is not supported')
-
- if shift_horizontal:
- image = translate_x(image, pixels, replace)
- else:
- image = translate_y(image, pixels, replace)
-
- # Convert bbox coordinates to pixel values.
- image_height = tf.shape(image)[0]
- image_width = tf.shape(image)[1]
- # pylint:disable=g-long-lambda
- wrapped_shift_bbox = lambda bbox: _shift_bbox(
- bbox, image_height, image_width, pixels, shift_horizontal)
- # pylint:enable=g-long-lambda
- bboxes = tf.map_fn(wrapped_shift_bbox, bboxes)
- return image, bboxes
-
-
-def translate_y_only_bboxes(
- image: tf.Tensor, bboxes: tf.Tensor, prob: float, pixels: int, replace):
- """Apply translate_y to each bbox in the image with probability prob."""
- if bboxes.shape.rank == 4:
- raise ValueError('translate_y_only_bboxes does not support rank 4 boxes')
-
- func_changes_bbox = False
- prob = _scale_bbox_only_op_probability(prob)
- return _apply_multi_bbox_augmentation_wrapper(
- image, bboxes, prob, translate_y, func_changes_bbox, pixels, replace)
-
-
-def _randomly_negate_tensor(tensor):
- """With 50% prob turn the tensor negative."""
- should_flip = tf.cast(tf.floor(tf.random.uniform([]) + 0.5), tf.bool)
- final_tensor = tf.cond(should_flip, lambda: tensor, lambda: -tensor)
- return final_tensor
-
-
-def _rotate_level_to_arg(level: float):
- level = (level / _MAX_LEVEL) * 30.
- level = _randomly_negate_tensor(level)
- return (level,)
-
-
-def _shrink_level_to_arg(level: float):
- """Converts level to ratio by which we shrink the image content."""
- if level == 0:
- return (1.0,) # if level is zero, do not shrink the image
- # Maximum shrinking ratio is 2.9.
- level = 2. / (_MAX_LEVEL / level) + 0.9
- return (level,)
-
-
-def _enhance_level_to_arg(level: float):
- return ((level / _MAX_LEVEL) * 1.8 + 0.1,)
-
-
-def _shear_level_to_arg(level: float):
- level = (level / _MAX_LEVEL) * 0.3
- # Flip level to negative with 50% chance.
- level = _randomly_negate_tensor(level)
- return (level,)
-
-
-def _translate_level_to_arg(level: float, translate_const: float):
- level = (level / _MAX_LEVEL) * float(translate_const)
- # Flip level to negative with 50% chance.
- level = _randomly_negate_tensor(level)
- return (level,)
-
-
-def _mult_to_arg(level: float, multiplier: float = 1.):
- return (int((level / _MAX_LEVEL) * multiplier),)
-
-
-def _apply_func_with_prob(func: Any, image: tf.Tensor,
- bboxes: Optional[tf.Tensor], args: Any, prob: float):
- """Apply `func` to image w/ `args` as input with probability `prob`."""
- assert isinstance(args, tuple)
- assert inspect.getfullargspec(func)[0][1] == 'bboxes'
-
- # Apply the function with probability `prob`.
- should_apply_op = tf.cast(
- tf.floor(tf.random.uniform([], dtype=tf.float32) + prob), tf.bool)
- augmented_image, augmented_bboxes = tf.cond(
- should_apply_op,
- lambda: func(image, bboxes, *args),
- lambda: (image, bboxes))
- return augmented_image, augmented_bboxes
-
-
-def select_and_apply_random_policy(policies: Any,
- image: tf.Tensor,
- bboxes: Optional[tf.Tensor] = None):
- """Select a random policy from `policies` and apply it to `image`."""
- policy_to_select = tf.random.uniform([], maxval=len(policies), dtype=tf.int32)
- # Note that using tf.case instead of tf.conds would result in significantly
- # larger graphs and would even break export for some larger policies.
- for (i, policy) in enumerate(policies):
- image, bboxes = tf.cond(
- tf.equal(i, policy_to_select),
- lambda selected_policy=policy: selected_policy(image, bboxes),
- lambda: (image, bboxes))
- return image, bboxes
-
-
-NAME_TO_FUNC = {
- 'AutoContrast': autocontrast,
- 'Equalize': equalize,
- 'Invert': invert,
- 'Rotate': wrapped_rotate,
- 'Posterize': posterize,
- 'Solarize': solarize,
- 'SolarizeAdd': solarize_add,
- 'Color': color,
- 'Contrast': contrast,
- 'Brightness': brightness,
- 'Sharpness': sharpness,
- 'ShearX': shear_x,
- 'ShearY': shear_y,
- 'TranslateX': translate_x,
- 'TranslateY': translate_y,
- 'Cutout': cutout,
- 'Rotate_BBox': rotate_with_bboxes,
- # pylint:disable=g-long-lambda
- 'ShearX_BBox': lambda image, bboxes, level, replace: shear_with_bboxes(
- image, bboxes, level, replace, shear_horizontal=True),
- 'ShearY_BBox': lambda image, bboxes, level, replace: shear_with_bboxes(
- image, bboxes, level, replace, shear_horizontal=False),
- 'TranslateX_BBox': lambda image, bboxes, pixels, replace: translate_bbox(
- image, bboxes, pixels, replace, shift_horizontal=True),
- 'TranslateY_BBox': lambda image, bboxes, pixels, replace: translate_bbox(
- image, bboxes, pixels, replace, shift_horizontal=False),
- # pylint:enable=g-long-lambda
- 'TranslateY_Only_BBoxes': translate_y_only_bboxes,
-}
-
-# Functions that require a `bboxes` parameter.
-REQUIRE_BOXES_FUNCS = frozenset({
- 'Rotate_BBox',
- 'ShearX_BBox',
- 'ShearY_BBox',
- 'TranslateX_BBox',
- 'TranslateY_BBox',
- 'TranslateY_Only_BBoxes',
-})
-
-# Functions that have a 'prob' parameter
-PROB_FUNCS = frozenset({
- 'TranslateY_Only_BBoxes',
-})
-
-# Functions that have a 'replace' parameter
-REPLACE_FUNCS = frozenset({
- 'Rotate',
- 'TranslateX',
- 'ShearX',
- 'ShearY',
- 'TranslateY',
- 'Cutout',
- 'Rotate_BBox',
- 'ShearX_BBox',
- 'ShearY_BBox',
- 'TranslateX_BBox',
- 'TranslateY_BBox',
- 'TranslateY_Only_BBoxes',
-})
-
-
-def level_to_arg(cutout_const: float, translate_const: float):
- """Creates a dict mapping image operation names to their arguments."""
-
- no_arg = lambda level: ()
- posterize_arg = lambda level: _mult_to_arg(level, 4)
- solarize_arg = lambda level: _mult_to_arg(level, 256)
- solarize_add_arg = lambda level: _mult_to_arg(level, 110)
- cutout_arg = lambda level: _mult_to_arg(level, cutout_const)
- translate_arg = lambda level: _translate_level_to_arg(level, translate_const)
- translate_bbox_arg = lambda level: _translate_level_to_arg(level, 120)
-
- args = {
- 'AutoContrast': no_arg,
- 'Equalize': no_arg,
- 'Invert': no_arg,
- 'Rotate': _rotate_level_to_arg,
- 'Posterize': posterize_arg,
- 'Solarize': solarize_arg,
- 'SolarizeAdd': solarize_add_arg,
- 'Color': _enhance_level_to_arg,
- 'Contrast': _enhance_level_to_arg,
- 'Brightness': _enhance_level_to_arg,
- 'Sharpness': _enhance_level_to_arg,
- 'ShearX': _shear_level_to_arg,
- 'ShearY': _shear_level_to_arg,
- 'Cutout': cutout_arg,
- 'TranslateX': translate_arg,
- 'TranslateY': translate_arg,
- 'Rotate_BBox': _rotate_level_to_arg,
- 'ShearX_BBox': _shear_level_to_arg,
- 'ShearY_BBox': _shear_level_to_arg,
- # pylint:disable=g-long-lambda
- 'TranslateX_BBox': lambda level: _translate_level_to_arg(
- level, translate_const),
- 'TranslateY_BBox': lambda level: _translate_level_to_arg(
- level, translate_const),
- # pylint:enable=g-long-lambda
- 'TranslateY_Only_BBoxes': translate_bbox_arg,
- }
- return args
-
-
-def bbox_wrapper(func):
- """Adds a bboxes function argument to func and returns unchanged bboxes."""
- def wrapper(images, bboxes, *args, **kwargs):
- return (func(images, *args, **kwargs), bboxes)
- return wrapper
-
-
-def _parse_policy_info(name: Text,
- prob: float,
- level: float,
- replace_value: List[int],
- cutout_const: float,
- translate_const: float,
- level_std: float = 0.) -> Tuple[Any, float, Any]:
- """Return the function that corresponds to `name` and update `level` param."""
- func = NAME_TO_FUNC[name]
-
- if level_std > 0:
- level += tf.random.normal([], dtype=tf.float32)
- level = tf.clip_by_value(level, 0., _MAX_LEVEL)
-
- args = level_to_arg(cutout_const, translate_const)[name](level)
-
- if name in PROB_FUNCS:
- # Add in the prob arg if it is required for the function that is called.
- args = tuple([prob] + list(args))
-
- if name in REPLACE_FUNCS:
- # Add in replace arg if it is required for the function that is called.
- args = tuple(list(args) + [replace_value])
-
- # Add bboxes as the second positional argument for the function if it does
- # not already exist.
- if 'bboxes' not in inspect.getfullargspec(func)[0]:
- func = bbox_wrapper(func)
-
- return func, prob, args
-
-
-class ImageAugment(object):
- """Image augmentation class for applying image distortions."""
-
- def distort(
- self,
- image: tf.Tensor
- ) -> tf.Tensor:
- """Given an image tensor, returns a distorted image with the same shape.
-
- Args:
- image: `Tensor` of shape [height, width, 3] or
- [num_frames, height, width, 3] representing an image or image sequence.
-
- Returns:
- The augmented version of `image`.
- """
- raise NotImplementedError()
-
- def distort_with_boxes(
- self,
- image: tf.Tensor,
- bboxes: tf.Tensor
- ) -> Tuple[tf.Tensor, tf.Tensor]:
- """Distorts the image and bounding boxes.
-
- Args:
- image: `Tensor` of shape [height, width, 3] or
- [num_frames, height, width, 3] representing an image or image sequence.
- bboxes: `Tensor` of shape [num_boxes, 4] or [num_frames, num_boxes, 4]
- representing bounding boxes for an image or image sequence.
-
- Returns:
- The augmented version of `image` and `bboxes`.
- """
- raise NotImplementedError
-
-
-class AutoAugment(ImageAugment):
- """Applies the AutoAugment policy to images.
-
- AutoAugment is from the paper: https://arxiv.org/abs/1805.09501.
- """
-
- def __init__(self,
- augmentation_name: Text = 'v0',
- policies: Optional[Iterable[Iterable[Tuple[Text, float,
- float]]]] = None,
- cutout_const: float = 100,
- translate_const: float = 250):
- """Applies the AutoAugment policy to images.
-
- Args:
- augmentation_name: The name of the AutoAugment policy to use. The
- available options are `v0`, `test`, `reduced_cifar10`, `svhn` and
- `reduced_imagenet`. `v0` is the policy used for all
- of the results in the paper and was found to achieve the best results on
- the COCO dataset. `v1`, `v2` and `v3` are additional good policies found
- on the COCO dataset that have slight variation in what operations were
- used during the search procedure along with how many operations are
- applied in parallel to a single image (2 vs 3). Make sure to set
- `policies` to `None` (the default) if you want to set options using
- `augmentation_name`.
- policies: list of lists of tuples in the form `(func, prob, level)`,
- `func` is a string name of the augmentation function, `prob` is the
- probability of applying the `func` operation, `level` (or magnitude) is
- the input argument for `func`. For example:
- ```
- [[('Equalize', 0.9, 3), ('Color', 0.7, 8)],
- [('Invert', 0.6, 5), ('Rotate', 0.2, 9), ('ShearX', 0.1, 2)], ...]
- ```
- The outer-most list must be 3-d. The number of operations in a
- sub-policy can vary from one sub-policy to another.
- If you provide `policies` as input, any option set with
- `augmentation_name` will get overriden as they are mutually exclusive.
- cutout_const: multiplier for applying cutout.
- translate_const: multiplier for applying translation.
-
- Raises:
- ValueError if `augmentation_name` is unsupported.
- """
- super(AutoAugment, self).__init__()
-
- self.augmentation_name = augmentation_name
- self.cutout_const = float(cutout_const)
- self.translate_const = float(translate_const)
- self.available_policies = {
- 'detection_v0': self.detection_policy_v0(),
- 'v0': self.policy_v0(),
- 'test': self.policy_test(),
- 'simple': self.policy_simple(),
- 'reduced_cifar10': self.policy_reduced_cifar10(),
- 'svhn': self.policy_svhn(),
- 'reduced_imagenet': self.policy_reduced_imagenet(),
- }
-
- if not policies:
- if augmentation_name not in self.available_policies:
- raise ValueError(
- 'Invalid augmentation_name: {}'.format(augmentation_name))
-
- self.policies = self.available_policies[augmentation_name]
-
- else:
- self._check_policy_shape(policies)
- self.policies = policies
-
- def _check_policy_shape(self, policies):
- """Checks dimension and shape of the custom policy.
-
- Args:
- policies: List of list of tuples in the form `(func, prob, level)`. Must
- have shape of `(:, :, 3)`.
-
- Raises:
- ValueError if the shape of `policies` is unexpected.
- """
- in_shape = np.array(policies).shape
- if len(in_shape) != 3 or in_shape[-1:] != (3,):
- raise ValueError('Wrong shape detected for custom policy. Expected '
- '(:, :, 3) but got {}.'.format(in_shape))
-
- def _make_tf_policies(self):
- """Prepares the TF functions for augmentations based on the policies."""
- replace_value = [128] * 3
-
- # func is the string name of the augmentation function, prob is the
- # probability of applying the operation and level is the parameter
- # associated with the tf op.
-
- # tf_policies are functions that take in an image and return an augmented
- # image.
- tf_policies = []
- for policy in self.policies:
- tf_policy = []
- assert_ranges = []
- # Link string name to the correct python function and make sure the
- # correct argument is passed into that function.
- for policy_info in policy:
- _, prob, level = policy_info
- assert_ranges.append(tf.Assert(tf.less_equal(prob, 1.), [prob]))
- assert_ranges.append(
- tf.Assert(tf.less_equal(level, int(_MAX_LEVEL)), [level]))
-
- policy_info = list(policy_info) + [
- replace_value, self.cutout_const, self.translate_const
- ]
- tf_policy.append(_parse_policy_info(*policy_info))
- # Now build the tf policy that will apply the augmentation procedue
- # on image.
- def make_final_policy(tf_policy_):
-
- def final_policy(image_, bboxes_):
- for func, prob, args in tf_policy_:
- image_, bboxes_ = _apply_func_with_prob(func, image_, bboxes_, args,
- prob)
- return image_, bboxes_
-
- return final_policy
-
- with tf.control_dependencies(assert_ranges):
- tf_policies.append(make_final_policy(tf_policy))
-
- return tf_policies
-
- def distort(self, image: tf.Tensor) -> tf.Tensor:
- """See base class."""
- input_image_type = image.dtype
- if input_image_type != tf.uint8:
- image = tf.clip_by_value(image, 0.0, 255.0)
- image = tf.cast(image, dtype=tf.uint8)
-
- tf_policies = self._make_tf_policies()
- image, _ = select_and_apply_random_policy(tf_policies, image, bboxes=None)
- image = tf.cast(image, dtype=input_image_type)
- return image
-
- def distort_with_boxes(self, image: tf.Tensor,
- bboxes: tf.Tensor) -> Tuple[tf.Tensor, tf.Tensor]:
- """See base class."""
- input_image_type = image.dtype
- if input_image_type != tf.uint8:
- image = tf.clip_by_value(image, 0.0, 255.0)
- image = tf.cast(image, dtype=tf.uint8)
-
- tf_policies = self._make_tf_policies()
- image, bboxes = select_and_apply_random_policy(tf_policies, image, bboxes)
- return image, bboxes
-
- @staticmethod
- def detection_policy_v0():
- """Autoaugment policy that was used in AutoAugment Paper for Detection.
-
- https://arxiv.org/pdf/1906.11172
-
- Each tuple is an augmentation operation of the form
- (operation, probability, magnitude). Each element in policy is a
- sub-policy that will be applied sequentially on the image.
-
- Returns:
- the policy.
- """
- policy = [
- [('TranslateX_BBox', 0.6, 4), ('Equalize', 0.8, 10)],
- [('TranslateY_Only_BBoxes', 0.2, 2), ('Cutout', 0.8, 8)],
- [('Sharpness', 0.0, 8), ('ShearX_BBox', 0.4, 0)],
- [('ShearY_BBox', 1.0, 2), ('TranslateY_Only_BBoxes', 0.6, 6)],
- [('Rotate_BBox', 0.6, 10), ('Color', 1.0, 6)],
- ]
- return policy
-
- @staticmethod
- def policy_v0():
- """Autoaugment policy that was used in AutoAugment Paper.
-
- Each tuple is an augmentation operation of the form
- (operation, probability, magnitude). Each element in policy is a
- sub-policy that will be applied sequentially on the image.
-
- Returns:
- the policy.
- """
-
- policy = [
- [('Equalize', 0.8, 1), ('ShearY', 0.8, 4)],
- [('Color', 0.4, 9), ('Equalize', 0.6, 3)],
- [('Color', 0.4, 1), ('Rotate', 0.6, 8)],
- [('Solarize', 0.8, 3), ('Equalize', 0.4, 7)],
- [('Solarize', 0.4, 2), ('Solarize', 0.6, 2)],
- [('Color', 0.2, 0), ('Equalize', 0.8, 8)],
- [('Equalize', 0.4, 8), ('SolarizeAdd', 0.8, 3)],
- [('ShearX', 0.2, 9), ('Rotate', 0.6, 8)],
- [('Color', 0.6, 1), ('Equalize', 1.0, 2)],
- [('Invert', 0.4, 9), ('Rotate', 0.6, 0)],
- [('Equalize', 1.0, 9), ('ShearY', 0.6, 3)],
- [('Color', 0.4, 7), ('Equalize', 0.6, 0)],
- [('Posterize', 0.4, 6), ('AutoContrast', 0.4, 7)],
- [('Solarize', 0.6, 8), ('Color', 0.6, 9)],
- [('Solarize', 0.2, 4), ('Rotate', 0.8, 9)],
- [('Rotate', 1.0, 7), ('TranslateY', 0.8, 9)],
- [('ShearX', 0.0, 0), ('Solarize', 0.8, 4)],
- [('ShearY', 0.8, 0), ('Color', 0.6, 4)],
- [('Color', 1.0, 0), ('Rotate', 0.6, 2)],
- [('Equalize', 0.8, 4), ('Equalize', 0.0, 8)],
- [('Equalize', 1.0, 4), ('AutoContrast', 0.6, 2)],
- [('ShearY', 0.4, 7), ('SolarizeAdd', 0.6, 7)],
- [('Posterize', 0.8, 2), ('Solarize', 0.6, 10)],
- [('Solarize', 0.6, 8), ('Equalize', 0.6, 1)],
- [('Color', 0.8, 6), ('Rotate', 0.4, 5)],
- ]
- return policy
-
- @staticmethod
- def policy_reduced_cifar10():
- """Autoaugment policy for reduced CIFAR-10 dataset.
-
- Result is from the AutoAugment paper: https://arxiv.org/abs/1805.09501.
-
- Each tuple is an augmentation operation of the form
- (operation, probability, magnitude). Each element in policy is a
- sub-policy that will be applied sequentially on the image.
-
- Returns:
- the policy.
- """
- policy = [
- [('Invert', 0.1, 7), ('Contrast', 0.2, 6)],
- [('Rotate', 0.7, 2), ('TranslateX', 0.3, 9)],
- [('Sharpness', 0.8, 1), ('Sharpness', 0.9, 3)],
- [('ShearY', 0.5, 8), ('TranslateY', 0.7, 9)],
- [('AutoContrast', 0.5, 8), ('Equalize', 0.9, 2)],
- [('ShearY', 0.2, 7), ('Posterize', 0.3, 7)],
- [('Color', 0.4, 3), ('Brightness', 0.6, 7)],
- [('Sharpness', 0.3, 9), ('Brightness', 0.7, 9)],
- [('Equalize', 0.6, 5), ('Equalize', 0.5, 1)],
- [('Contrast', 0.6, 7), ('Sharpness', 0.6, 5)],
- [('Color', 0.7, 7), ('TranslateX', 0.5, 8)],
- [('Equalize', 0.3, 7), ('AutoContrast', 0.4, 8)],
- [('TranslateY', 0.4, 3), ('Sharpness', 0.2, 6)],
- [('Brightness', 0.9, 6), ('Color', 0.2, 8)],
- [('Solarize', 0.5, 2), ('Invert', 0.0, 3)],
- [('Equalize', 0.2, 0), ('AutoContrast', 0.6, 0)],
- [('Equalize', 0.2, 8), ('Equalize', 0.6, 4)],
- [('Color', 0.9, 9), ('Equalize', 0.6, 6)],
- [('AutoContrast', 0.8, 4), ('Solarize', 0.2, 8)],
- [('Brightness', 0.1, 3), ('Color', 0.7, 0)],
- [('Solarize', 0.4, 5), ('AutoContrast', 0.9, 3)],
- [('TranslateY', 0.9, 9), ('TranslateY', 0.7, 9)],
- [('AutoContrast', 0.9, 2), ('Solarize', 0.8, 3)],
- [('Equalize', 0.8, 8), ('Invert', 0.1, 3)],
- [('TranslateY', 0.7, 9), ('AutoContrast', 0.9, 1)],
- ]
- return policy
-
- @staticmethod
- def policy_svhn():
- """Autoaugment policy for SVHN dataset.
-
- Result is from the AutoAugment paper: https://arxiv.org/abs/1805.09501.
-
- Each tuple is an augmentation operation of the form
- (operation, probability, magnitude). Each element in policy is a
- sub-policy that will be applied sequentially on the image.
-
- Returns:
- the policy.
- """
- policy = [
- [('ShearX', 0.9, 4), ('Invert', 0.2, 3)],
- [('ShearY', 0.9, 8), ('Invert', 0.7, 5)],
- [('Equalize', 0.6, 5), ('Solarize', 0.6, 6)],
- [('Invert', 0.9, 3), ('Equalize', 0.6, 3)],
- [('Equalize', 0.6, 1), ('Rotate', 0.9, 3)],
- [('ShearX', 0.9, 4), ('AutoContrast', 0.8, 3)],
- [('ShearY', 0.9, 8), ('Invert', 0.4, 5)],
- [('ShearY', 0.9, 5), ('Solarize', 0.2, 6)],
- [('Invert', 0.9, 6), ('AutoContrast', 0.8, 1)],
- [('Equalize', 0.6, 3), ('Rotate', 0.9, 3)],
- [('ShearX', 0.9, 4), ('Solarize', 0.3, 3)],
- [('ShearY', 0.8, 8), ('Invert', 0.7, 4)],
- [('Equalize', 0.9, 5), ('TranslateY', 0.6, 6)],
- [('Invert', 0.9, 4), ('Equalize', 0.6, 7)],
- [('Contrast', 0.3, 3), ('Rotate', 0.8, 4)],
- [('Invert', 0.8, 5), ('TranslateY', 0.0, 2)],
- [('ShearY', 0.7, 6), ('Solarize', 0.4, 8)],
- [('Invert', 0.6, 4), ('Rotate', 0.8, 4)],
- [('ShearY', 0.3, 7), ('TranslateX', 0.9, 3)],
- [('ShearX', 0.1, 6), ('Invert', 0.6, 5)],
- [('Solarize', 0.7, 2), ('TranslateY', 0.6, 7)],
- [('ShearY', 0.8, 4), ('Invert', 0.8, 8)],
- [('ShearX', 0.7, 9), ('TranslateY', 0.8, 3)],
- [('ShearY', 0.8, 5), ('AutoContrast', 0.7, 3)],
- [('ShearX', 0.7, 2), ('Invert', 0.1, 5)],
- ]
- return policy
-
- @staticmethod
- def policy_reduced_imagenet():
- """Autoaugment policy for reduced ImageNet dataset.
-
- Result is from the AutoAugment paper: https://arxiv.org/abs/1805.09501.
-
- Each tuple is an augmentation operation of the form
- (operation, probability, magnitude). Each element in policy is a
- sub-policy that will be applied sequentially on the image.
-
- Returns:
- the policy.
- """
- policy = [
- [('Posterize', 0.4, 8), ('Rotate', 0.6, 9)],
- [('Solarize', 0.6, 5), ('AutoContrast', 0.6, 5)],
- [('Equalize', 0.8, 8), ('Equalize', 0.6, 3)],
- [('Posterize', 0.6, 7), ('Posterize', 0.6, 6)],
- [('Equalize', 0.4, 7), ('Solarize', 0.2, 4)],
- [('Equalize', 0.4, 4), ('Rotate', 0.8, 8)],
- [('Solarize', 0.6, 3), ('Equalize', 0.6, 7)],
- [('Posterize', 0.8, 5), ('Equalize', 1.0, 2)],
- [('Rotate', 0.2, 3), ('Solarize', 0.6, 8)],
- [('Equalize', 0.6, 8), ('Posterize', 0.4, 6)],
- [('Rotate', 0.8, 8), ('Color', 0.4, 0)],
- [('Rotate', 0.4, 9), ('Equalize', 0.6, 2)],
- [('Equalize', 0.0, 7), ('Equalize', 0.8, 8)],
- [('Invert', 0.6, 4), ('Equalize', 1.0, 8)],
- [('Color', 0.6, 4), ('Contrast', 1.0, 8)],
- [('Rotate', 0.8, 8), ('Color', 1.0, 2)],
- [('Color', 0.8, 8), ('Solarize', 0.8, 7)],
- [('Sharpness', 0.4, 7), ('Invert', 0.6, 8)],
- [('ShearX', 0.6, 5), ('Equalize', 1.0, 9)],
- [('Color', 0.4, 0), ('Equalize', 0.6, 3)],
- [('Equalize', 0.4, 7), ('Solarize', 0.2, 4)],
- [('Solarize', 0.6, 5), ('AutoContrast', 0.6, 5)],
- [('Invert', 0.6, 4), ('Equalize', 1.0, 8)],
- [('Color', 0.6, 4), ('Contrast', 1.0, 8)],
- [('Equalize', 0.8, 8), ('Equalize', 0.6, 3)]
- ]
- return policy
-
- @staticmethod
- def policy_simple():
- """Same as `policy_v0`, except with custom ops removed."""
-
- policy = [
- [('Color', 0.4, 9), ('Equalize', 0.6, 3)],
- [('Solarize', 0.8, 3), ('Equalize', 0.4, 7)],
- [('Solarize', 0.4, 2), ('Solarize', 0.6, 2)],
- [('Color', 0.2, 0), ('Equalize', 0.8, 8)],
- [('Equalize', 0.4, 8), ('SolarizeAdd', 0.8, 3)],
- [('Color', 0.6, 1), ('Equalize', 1.0, 2)],
- [('Color', 0.4, 7), ('Equalize', 0.6, 0)],
- [('Posterize', 0.4, 6), ('AutoContrast', 0.4, 7)],
- [('Solarize', 0.6, 8), ('Color', 0.6, 9)],
- [('Equalize', 0.8, 4), ('Equalize', 0.0, 8)],
- [('Equalize', 1.0, 4), ('AutoContrast', 0.6, 2)],
- [('Posterize', 0.8, 2), ('Solarize', 0.6, 10)],
- [('Solarize', 0.6, 8), ('Equalize', 0.6, 1)],
- ]
- return policy
-
- @staticmethod
- def policy_test():
- """Autoaugment test policy for debugging."""
- policy = [
- [('TranslateX', 1.0, 4), ('Equalize', 1.0, 10)],
- ]
- return policy
-
-
-def _maybe_identity(x: Optional[tf.Tensor]) -> Optional[tf.Tensor]:
- return tf.identity(x) if x is not None else None
-
-
-class RandAugment(ImageAugment):
- """Applies the RandAugment policy to images.
-
- RandAugment is from the paper https://arxiv.org/abs/1909.13719,
- """
-
- def __init__(self,
- num_layers: int = 2,
- magnitude: float = 10.,
- cutout_const: float = 40.,
- translate_const: float = 100.,
- magnitude_std: float = 0.0,
- prob_to_apply: Optional[float] = None,
- exclude_ops: Optional[List[str]] = None):
- """Applies the RandAugment policy to images.
-
- Args:
- num_layers: Integer, the number of augmentation transformations to apply
- sequentially to an image. Represented as (N) in the paper. Usually best
- values will be in the range [1, 3].
- magnitude: Integer, shared magnitude across all augmentation operations.
- Represented as (M) in the paper. Usually best values are in the range
- [5, 10].
- cutout_const: multiplier for applying cutout.
- translate_const: multiplier for applying translation.
- magnitude_std: randomness of the severity as proposed by the authors of
- the timm library.
- prob_to_apply: The probability to apply the selected augmentation at each
- layer.
- exclude_ops: exclude selected operations.
- """
- super(RandAugment, self).__init__()
-
- self.num_layers = num_layers
- self.magnitude = float(magnitude)
- self.cutout_const = float(cutout_const)
- self.translate_const = float(translate_const)
- self.prob_to_apply = (
- float(prob_to_apply) if prob_to_apply is not None else None)
- self.available_ops = [
- 'AutoContrast', 'Equalize', 'Invert', 'Rotate', 'Posterize', 'Solarize',
- 'Color', 'Contrast', 'Brightness', 'Sharpness', 'ShearX', 'ShearY',
- 'TranslateX', 'TranslateY', 'Cutout', 'SolarizeAdd'
- ]
- self.magnitude_std = magnitude_std
- if exclude_ops:
- self.available_ops = [
- op for op in self.available_ops if op not in exclude_ops
- ]
-
- @classmethod
- def build_for_detection(cls,
- num_layers: int = 2,
- magnitude: float = 10.,
- cutout_const: float = 40.,
- translate_const: float = 100.,
- magnitude_std: float = 0.0,
- prob_to_apply: Optional[float] = None,
- exclude_ops: Optional[List[str]] = None):
- """Builds a RandAugment that modifies bboxes for geometric transforms."""
- augmenter = cls(
- num_layers=num_layers,
- magnitude=magnitude,
- cutout_const=cutout_const,
- translate_const=translate_const,
- magnitude_std=magnitude_std,
- prob_to_apply=prob_to_apply,
- exclude_ops=exclude_ops)
- box_aware_ops_by_base_name = {
- 'Rotate': 'Rotate_BBox',
- 'ShearX': 'ShearX_BBox',
- 'ShearY': 'ShearY_BBox',
- 'TranslateX': 'TranslateX_BBox',
- 'TranslateY': 'TranslateY_BBox',
- }
- augmenter.available_ops = [
- box_aware_ops_by_base_name.get(op_name) or op_name
- for op_name in augmenter.available_ops
- ]
- return augmenter
-
- def _distort_common(
- self,
- image: tf.Tensor,
- bboxes: Optional[tf.Tensor] = None
- ) -> Tuple[tf.Tensor, Optional[tf.Tensor]]:
- """Distorts the image and optionally bounding boxes."""
- input_image_type = image.dtype
-
- if input_image_type != tf.uint8:
- image = tf.clip_by_value(image, 0.0, 255.0)
- image = tf.cast(image, dtype=tf.uint8)
-
- replace_value = [128] * 3
- min_prob, max_prob = 0.2, 0.8
-
- aug_image = image
- aug_bboxes = bboxes
-
- for _ in range(self.num_layers):
- op_to_select = tf.random.uniform([],
- maxval=len(self.available_ops) + 1,
- dtype=tf.int32)
-
- branch_fns = []
- for (i, op_name) in enumerate(self.available_ops):
- prob = tf.random.uniform([],
- minval=min_prob,
- maxval=max_prob,
- dtype=tf.float32)
- func, _, args = _parse_policy_info(op_name, prob, self.magnitude,
- replace_value, self.cutout_const,
- self.translate_const,
- self.magnitude_std)
- branch_fns.append((
- i,
- # pylint:disable=g-long-lambda
- lambda selected_func=func, selected_args=args: selected_func(
- image, bboxes, *selected_args)))
- # pylint:enable=g-long-lambda
-
- aug_image, aug_bboxes = tf.switch_case(
- branch_index=op_to_select,
- branch_fns=branch_fns,
- default=lambda: (tf.identity(image), _maybe_identity(bboxes)))
-
- if self.prob_to_apply is not None:
- aug_image, aug_bboxes = tf.cond(
- tf.random.uniform(shape=[], dtype=tf.float32) < self.prob_to_apply,
- lambda: (tf.identity(aug_image), _maybe_identity(aug_bboxes)),
- lambda: (tf.identity(image), _maybe_identity(bboxes)))
- image = aug_image
- bboxes = aug_bboxes
-
- image = tf.cast(image, dtype=input_image_type)
- return image, bboxes
-
- def distort(self, image: tf.Tensor) -> tf.Tensor:
- """See base class."""
- image, _ = self._distort_common(image)
- return image
-
- def distort_with_boxes(self, image: tf.Tensor,
- bboxes: tf.Tensor) -> Tuple[tf.Tensor, tf.Tensor]:
- """See base class."""
- image, bboxes = self._distort_common(image, bboxes)
- return image, bboxes
-
-
-class RandomErasing(ImageAugment):
- """Applies RandomErasing to a single image.
-
- Reference: https://arxiv.org/abs/1708.04896
-
- Implementaion is inspired by https://github.com/rwightman/pytorch-image-models
- """
-
- def __init__(self,
- probability: float = 0.25,
- min_area: float = 0.02,
- max_area: float = 1 / 3,
- min_aspect: float = 0.3,
- max_aspect=None,
- min_count=1,
- max_count=1,
- trials=10):
- """Applies RandomErasing to a single image.
-
- Args:
- probability (float, optional): Probability of augmenting the image.
- Defaults to 0.25.
- min_area (float, optional): Minimum area of the random erasing rectangle.
- Defaults to 0.02.
- max_area (float, optional): Maximum area of the random erasing rectangle.
- Defaults to 1/3.
- min_aspect (float, optional): Minimum aspect rate of the random erasing
- rectangle. Defaults to 0.3.
- max_aspect ([type], optional): Maximum aspect rate of the random erasing
- rectangle. Defaults to None.
- min_count (int, optional): Minimum number of erased rectangles. Defaults
- to 1.
- max_count (int, optional): Maximum number of erased rectangles. Defaults
- to 1.
- trials (int, optional): Maximum number of trials to randomly sample a
- rectangle that fulfills constraint. Defaults to 10.
- """
- self._probability = probability
- self._min_area = float(min_area)
- self._max_area = float(max_area)
- self._min_log_aspect = math.log(min_aspect)
- self._max_log_aspect = math.log(max_aspect or 1 / min_aspect)
- self._min_count = min_count
- self._max_count = max_count
- self._trials = trials
-
- def distort(self, image: tf.Tensor) -> tf.Tensor:
- """Applies RandomErasing to single `image`.
-
- Args:
- image (tf.Tensor): Of shape [height, width, 3] representing an image.
-
- Returns:
- tf.Tensor: The augmented version of `image`.
- """
- uniform_random = tf.random.uniform(shape=[], minval=0., maxval=1.0)
- mirror_cond = tf.less(uniform_random, self._probability)
- image = tf.cond(mirror_cond, lambda: self._erase(image), lambda: image)
- return image
-
- @tf.function
- def _erase(self, image: tf.Tensor) -> tf.Tensor:
- """Erase an area."""
- if self._min_count == self._max_count:
- count = self._min_count
- else:
- count = tf.random.uniform(
- shape=[],
- minval=int(self._min_count),
- maxval=int(self._max_count - self._min_count + 1),
- dtype=tf.int32)
-
- image_height = tf.shape(image)[0]
- image_width = tf.shape(image)[1]
- area = tf.cast(image_width * image_height, tf.float32)
-
- for _ in range(count):
- # Work around since break is not supported in tf.function
- is_trial_successfull = False
- for _ in range(self._trials):
- if not is_trial_successfull:
- erase_area = tf.random.uniform(
- shape=[],
- minval=area * self._min_area,
- maxval=area * self._max_area)
- aspect_ratio = tf.math.exp(
- tf.random.uniform(
- shape=[],
- minval=self._min_log_aspect,
- maxval=self._max_log_aspect))
-
- half_height = tf.cast(
- tf.math.round(tf.math.sqrt(erase_area * aspect_ratio) / 2),
- dtype=tf.int32)
- half_width = tf.cast(
- tf.math.round(tf.math.sqrt(erase_area / aspect_ratio) / 2),
- dtype=tf.int32)
-
- if 2 * half_height < image_height and 2 * half_width < image_width:
- center_height = tf.random.uniform(
- shape=[],
- minval=0,
- maxval=int(image_height - 2 * half_height),
- dtype=tf.int32)
- center_width = tf.random.uniform(
- shape=[],
- minval=0,
- maxval=int(image_width - 2 * half_width),
- dtype=tf.int32)
-
- image = _fill_rectangle(
- image,
- center_width,
- center_height,
- half_width,
- half_height,
- replace=None)
-
- is_trial_successfull = True
-
- return image
-
-
-class MixupAndCutmix:
- """Applies Mixup and/or Cutmix to a batch of images.
-
- - Mixup: https://arxiv.org/abs/1710.09412
- - Cutmix: https://arxiv.org/abs/1905.04899
-
- Implementaion is inspired by https://github.com/rwightman/pytorch-image-models
- """
-
- def __init__(self,
- mixup_alpha: float = .8,
- cutmix_alpha: float = 1.,
- prob: float = 1.0,
- switch_prob: float = 0.5,
- label_smoothing: float = 0.1,
- num_classes: int = 1001):
- """Applies Mixup and/or Cutmix to a batch of images.
-
- Args:
- mixup_alpha (float, optional): For drawing a random lambda (`lam`) from a
- beta distribution (for each image). If zero Mixup is deactivated.
- Defaults to .8.
- cutmix_alpha (float, optional): For drawing a random lambda (`lam`) from a
- beta distribution (for each image). If zero Cutmix is deactivated.
- Defaults to 1..
- prob (float, optional): Of augmenting the batch. Defaults to 1.0.
- switch_prob (float, optional): Probability of applying Cutmix for the
- batch. Defaults to 0.5.
- label_smoothing (float, optional): Constant for label smoothing. Defaults
- to 0.1.
- num_classes (int, optional): Number of classes. Defaults to 1001.
- """
- self.mixup_alpha = mixup_alpha
- self.cutmix_alpha = cutmix_alpha
- self.mix_prob = prob
- self.switch_prob = switch_prob
- self.label_smoothing = label_smoothing
- self.num_classes = num_classes
- self.mode = 'batch'
- self.mixup_enabled = True
-
- if self.mixup_alpha and not self.cutmix_alpha:
- self.switch_prob = -1
- elif not self.mixup_alpha and self.cutmix_alpha:
- self.switch_prob = 1
-
- def __call__(self, images: tf.Tensor,
- labels: tf.Tensor) -> Tuple[tf.Tensor, tf.Tensor]:
- return self.distort(images, labels)
-
- def distort(self, images: tf.Tensor,
- labels: tf.Tensor) -> Tuple[tf.Tensor, tf.Tensor]:
- """Applies Mixup and/or Cutmix to batch of images and transforms labels.
-
- Args:
- images (tf.Tensor): Of shape [batch_size,height, width, 3] representing a
- batch of image.
- labels (tf.Tensor): Of shape [batch_size, ] representing the class id for
- each image of the batch.
-
- Returns:
- Tuple[tf.Tensor, tf.Tensor]: The augmented version of `image` and
- `labels`.
- """
- augment_cond = tf.less(
- tf.random.uniform(shape=[], minval=0., maxval=1.0), self.mix_prob)
- # pylint: disable=g-long-lambda
- augment_a = lambda: self._update_labels(*tf.cond(
- tf.less(
- tf.random.uniform(shape=[], minval=0., maxval=1.0), self.switch_prob
- ), lambda: self._cutmix(images, labels), lambda: self._mixup(
- images, labels)))
- augment_b = lambda: (images, self._smooth_labels(labels))
- # pylint: enable=g-long-lambda
-
- return tf.cond(augment_cond, augment_a, augment_b)
-
- @staticmethod
- def _sample_from_beta(alpha, beta, shape):
- sample_alpha = tf.random.gamma(shape, 1., beta=alpha)
- sample_beta = tf.random.gamma(shape, 1., beta=beta)
- return sample_alpha / (sample_alpha + sample_beta)
-
- def _cutmix(self, images: tf.Tensor,
- labels: tf.Tensor) -> Tuple[tf.Tensor, tf.Tensor, tf.Tensor]:
- """Apply cutmix."""
- lam = MixupAndCutmix._sample_from_beta(self.cutmix_alpha, self.cutmix_alpha,
- tf.shape(labels))
-
- ratio = tf.math.sqrt(1 - lam)
-
- batch_size = tf.shape(images)[0]
- image_height, image_width = tf.shape(images)[1], tf.shape(images)[2]
-
- cut_height = tf.cast(
- ratio * tf.cast(image_height, dtype=tf.float32), dtype=tf.int32)
- cut_width = tf.cast(
- ratio * tf.cast(image_height, dtype=tf.float32), dtype=tf.int32)
-
- random_center_height = tf.random.uniform(
- shape=[batch_size], minval=0, maxval=image_height, dtype=tf.int32)
- random_center_width = tf.random.uniform(
- shape=[batch_size], minval=0, maxval=image_width, dtype=tf.int32)
-
- bbox_area = cut_height * cut_width
- lam = 1. - bbox_area / (image_height * image_width)
- lam = tf.cast(lam, dtype=tf.float32)
-
- images = tf.map_fn(
- lambda x: _fill_rectangle(*x),
- (images, random_center_width, random_center_height, cut_width // 2,
- cut_height // 2, tf.reverse(images, [0])),
- dtype=(
- images.dtype, tf.int32, tf.int32, tf.int32, tf.int32, images.dtype),
- fn_output_signature=tf.TensorSpec(images.shape[1:], dtype=images.dtype))
-
- return images, labels, lam
-
- def _mixup(self, images: tf.Tensor,
- labels: tf.Tensor) -> Tuple[tf.Tensor, tf.Tensor, tf.Tensor]:
- lam = MixupAndCutmix._sample_from_beta(self.mixup_alpha, self.mixup_alpha,
- tf.shape(labels))
- lam = tf.reshape(lam, [-1, 1, 1, 1])
- lam_cast = tf.cast(lam, dtype=images.dtype)
- images = lam_cast * images + (1. - lam_cast) * tf.reverse(images, [0])
-
- return images, labels, tf.squeeze(lam)
-
- def _smooth_labels(self, labels: tf.Tensor) -> tf.Tensor:
- off_value = self.label_smoothing / self.num_classes
- on_value = 1. - self.label_smoothing + off_value
-
- smooth_labels = tf.one_hot(
- labels, self.num_classes, on_value=on_value, off_value=off_value)
- return smooth_labels
-
- def _update_labels(self, images: tf.Tensor, labels: tf.Tensor,
- lam: tf.Tensor) -> Tuple[tf.Tensor, tf.Tensor]:
- labels_1 = self._smooth_labels(labels)
- labels_2 = tf.reverse(labels_1, [0])
-
- lam = tf.reshape(lam, [-1, 1])
- labels = lam * labels_1 + (1. - lam) * labels_2
-
- return images, labels
diff --git a/official/vision/beta/ops/augment_test.py b/official/vision/beta/ops/augment_test.py
deleted file mode 100644
index c9e77972c448d23844543c0a56e524901711b626..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/augment_test.py
+++ /dev/null
@@ -1,440 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for autoaugment."""
-
-from __future__ import absolute_import
-from __future__ import division
-from __future__ import print_function
-
-import random
-from absl.testing import parameterized
-
-import tensorflow as tf
-
-from official.vision.beta.ops import augment
-
-
-def get_dtype_test_cases():
- return [
- ('uint8', tf.uint8),
- ('int32', tf.int32),
- ('float16', tf.float16),
- ('float32', tf.float32),
- ]
-
-
-@parameterized.named_parameters(get_dtype_test_cases())
-class TransformsTest(parameterized.TestCase, tf.test.TestCase):
- """Basic tests for fundamental transformations."""
-
- def test_to_from_4d(self, dtype):
- for shape in [(10, 10), (10, 10, 10), (10, 10, 10, 10)]:
- original_ndims = len(shape)
- image = tf.zeros(shape, dtype=dtype)
- image_4d = augment.to_4d(image)
- self.assertEqual(4, tf.rank(image_4d))
- self.assertAllEqual(image, augment.from_4d(image_4d, original_ndims))
-
- def test_transform(self, dtype):
- image = tf.constant([[1, 2], [3, 4]], dtype=dtype)
- self.assertAllEqual(
- augment.transform(image, transforms=[1] * 8), [[4, 4], [4, 4]])
-
- def test_translate(self, dtype):
- image = tf.constant(
- [[1, 0, 1, 0], [0, 1, 0, 1], [1, 0, 1, 0], [0, 1, 0, 1]], dtype=dtype)
- translations = [-1, -1]
- translated = augment.translate(image=image, translations=translations)
- expected = [[1, 0, 1, 1], [0, 1, 0, 0], [1, 0, 1, 1], [1, 0, 1, 1]]
- self.assertAllEqual(translated, expected)
-
- def test_translate_shapes(self, dtype):
- translation = [0, 0]
- for shape in [(3, 3), (5, 5), (224, 224, 3)]:
- image = tf.zeros(shape, dtype=dtype)
- self.assertAllEqual(image, augment.translate(image, translation))
-
- def test_translate_invalid_translation(self, dtype):
- image = tf.zeros((1, 1), dtype=dtype)
- invalid_translation = [[[1, 1]]]
- with self.assertRaisesRegex(TypeError, 'rank 1 or 2'):
- _ = augment.translate(image, invalid_translation)
-
- def test_rotate(self, dtype):
- image = tf.reshape(tf.cast(tf.range(9), dtype), (3, 3))
- rotation = 90.
- transformed = augment.rotate(image=image, degrees=rotation)
- expected = [[2, 5, 8], [1, 4, 7], [0, 3, 6]]
- self.assertAllEqual(transformed, expected)
-
- def test_rotate_shapes(self, dtype):
- degrees = 0.
- for shape in [(3, 3), (5, 5), (224, 224, 3)]:
- image = tf.zeros(shape, dtype=dtype)
- self.assertAllEqual(image, augment.rotate(image, degrees))
-
-
-class AutoaugmentTest(tf.test.TestCase, parameterized.TestCase):
-
- AVAILABLE_POLICIES = [
- 'v0',
- 'test',
- 'simple',
- 'reduced_cifar10',
- 'svhn',
- 'reduced_imagenet',
- 'detection_v0',
- ]
-
- def test_autoaugment(self):
- """Smoke test to be sure there are no syntax errors."""
- image = tf.zeros((224, 224, 3), dtype=tf.uint8)
-
- for policy in self.AVAILABLE_POLICIES:
- augmenter = augment.AutoAugment(augmentation_name=policy)
- aug_image = augmenter.distort(image)
-
- self.assertEqual((224, 224, 3), aug_image.shape)
-
- def test_autoaugment_with_bboxes(self):
- """Smoke test to be sure there are no syntax errors with bboxes."""
- image = tf.zeros((224, 224, 3), dtype=tf.uint8)
- bboxes = tf.ones((2, 4), dtype=tf.float32)
-
- for policy in self.AVAILABLE_POLICIES:
- augmenter = augment.AutoAugment(augmentation_name=policy)
- aug_image, aug_bboxes = augmenter.distort_with_boxes(image, bboxes)
-
- self.assertEqual((224, 224, 3), aug_image.shape)
- self.assertEqual((2, 4), aug_bboxes.shape)
-
- def test_randaug(self):
- """Smoke test to be sure there are no syntax errors."""
- image = tf.zeros((224, 224, 3), dtype=tf.uint8)
-
- augmenter = augment.RandAugment()
- aug_image = augmenter.distort(image)
-
- self.assertEqual((224, 224, 3), aug_image.shape)
-
- def test_randaug_with_bboxes(self):
- """Smoke test to be sure there are no syntax errors with bboxes."""
- image = tf.zeros((224, 224, 3), dtype=tf.uint8)
- bboxes = tf.ones((2, 4), dtype=tf.float32)
-
- augmenter = augment.RandAugment()
- aug_image, aug_bboxes = augmenter.distort_with_boxes(image, bboxes)
-
- self.assertEqual((224, 224, 3), aug_image.shape)
- self.assertEqual((2, 4), aug_bboxes.shape)
-
- def test_randaug_build_for_detection(self):
- """Smoke test to be sure there are no syntax errors built for detection."""
- image = tf.zeros((224, 224, 3), dtype=tf.uint8)
- bboxes = tf.ones((2, 4), dtype=tf.float32)
-
- augmenter = augment.RandAugment.build_for_detection()
- self.assertCountEqual(augmenter.available_ops, [
- 'AutoContrast', 'Equalize', 'Invert', 'Posterize', 'Solarize', 'Color',
- 'Contrast', 'Brightness', 'Sharpness', 'Cutout', 'SolarizeAdd',
- 'Rotate_BBox', 'ShearX_BBox', 'ShearY_BBox', 'TranslateX_BBox',
- 'TranslateY_BBox'
- ])
-
- aug_image, aug_bboxes = augmenter.distort_with_boxes(image, bboxes)
- self.assertEqual((224, 224, 3), aug_image.shape)
- self.assertEqual((2, 4), aug_bboxes.shape)
-
- def test_all_policy_ops(self):
- """Smoke test to be sure all augmentation functions can execute."""
-
- prob = 1
- magnitude = 10
- replace_value = [128] * 3
- cutout_const = 100
- translate_const = 250
-
- image = tf.ones((224, 224, 3), dtype=tf.uint8)
- bboxes = None
-
- for op_name in augment.NAME_TO_FUNC.keys() - augment.REQUIRE_BOXES_FUNCS:
- func, _, args = augment._parse_policy_info(op_name, prob, magnitude,
- replace_value, cutout_const,
- translate_const)
- image, bboxes = func(image, bboxes, *args)
-
- self.assertEqual((224, 224, 3), image.shape)
- self.assertIsNone(bboxes)
-
- def test_all_policy_ops_with_bboxes(self):
- """Smoke test to be sure all augmentation functions can execute."""
-
- prob = 1
- magnitude = 10
- replace_value = [128] * 3
- cutout_const = 100
- translate_const = 250
-
- image = tf.ones((224, 224, 3), dtype=tf.uint8)
- bboxes = tf.ones((2, 4), dtype=tf.float32)
-
- for op_name in augment.NAME_TO_FUNC:
- func, _, args = augment._parse_policy_info(op_name, prob, magnitude,
- replace_value, cutout_const,
- translate_const)
- image, bboxes = func(image, bboxes, *args)
-
- self.assertEqual((224, 224, 3), image.shape)
- self.assertEqual((2, 4), bboxes.shape)
-
- def test_autoaugment_video(self):
- """Smoke test with video to be sure there are no syntax errors."""
- image = tf.zeros((2, 224, 224, 3), dtype=tf.uint8)
-
- for policy in self.AVAILABLE_POLICIES:
- augmenter = augment.AutoAugment(augmentation_name=policy)
- aug_image = augmenter.distort(image)
-
- self.assertEqual((2, 224, 224, 3), aug_image.shape)
-
- def test_autoaugment_video_with_boxes(self):
- """Smoke test with video to be sure there are no syntax errors."""
- image = tf.zeros((2, 224, 224, 3), dtype=tf.uint8)
- bboxes = tf.ones((2, 2, 4), dtype=tf.float32)
-
- for policy in self.AVAILABLE_POLICIES:
- augmenter = augment.AutoAugment(augmentation_name=policy)
- aug_image, aug_bboxes = augmenter.distort_with_boxes(image, bboxes)
-
- self.assertEqual((2, 224, 224, 3), aug_image.shape)
- self.assertEqual((2, 2, 4), aug_bboxes.shape)
-
- def test_randaug_video(self):
- """Smoke test with video to be sure there are no syntax errors."""
- image = tf.zeros((2, 224, 224, 3), dtype=tf.uint8)
-
- augmenter = augment.RandAugment()
- aug_image = augmenter.distort(image)
-
- self.assertEqual((2, 224, 224, 3), aug_image.shape)
-
- def test_all_policy_ops_video(self):
- """Smoke test to be sure all video augmentation functions can execute."""
-
- prob = 1
- magnitude = 10
- replace_value = [128] * 3
- cutout_const = 100
- translate_const = 250
-
- image = tf.ones((2, 224, 224, 3), dtype=tf.uint8)
- bboxes = None
-
- for op_name in augment.NAME_TO_FUNC.keys() - augment.REQUIRE_BOXES_FUNCS:
- func, _, args = augment._parse_policy_info(op_name, prob, magnitude,
- replace_value, cutout_const,
- translate_const)
- image, bboxes = func(image, bboxes, *args)
-
- self.assertEqual((2, 224, 224, 3), image.shape)
- self.assertIsNone(bboxes)
-
- def test_all_policy_ops_video_with_bboxes(self):
- """Smoke test to be sure all video augmentation functions can execute."""
-
- prob = 1
- magnitude = 10
- replace_value = [128] * 3
- cutout_const = 100
- translate_const = 250
-
- image = tf.ones((2, 224, 224, 3), dtype=tf.uint8)
- bboxes = tf.ones((2, 2, 4), dtype=tf.float32)
-
- for op_name in augment.NAME_TO_FUNC:
- func, _, args = augment._parse_policy_info(op_name, prob, magnitude,
- replace_value, cutout_const,
- translate_const)
- if op_name in {
- 'Rotate_BBox',
- 'ShearX_BBox',
- 'ShearY_BBox',
- 'TranslateX_BBox',
- 'TranslateY_BBox',
- 'TranslateY_Only_BBoxes',
- }:
- with self.assertRaises(ValueError):
- func(image, bboxes, *args)
- else:
- image, bboxes = func(image, bboxes, *args)
-
- self.assertEqual((2, 224, 224, 3), image.shape)
- self.assertEqual((2, 2, 4), bboxes.shape)
-
- def _generate_test_policy(self):
- """Generate a test policy at random."""
- op_list = list(augment.NAME_TO_FUNC.keys())
- size = 6
- prob = [round(random.uniform(0., 1.), 1) for _ in range(size)]
- mag = [round(random.uniform(0, 10)) for _ in range(size)]
- policy = []
- for i in range(0, size, 2):
- policy.append([(op_list[i], prob[i], mag[i]),
- (op_list[i + 1], prob[i + 1], mag[i + 1])])
- return policy
-
- def test_custom_policy(self):
- """Test autoaugment with a custom policy."""
- image = tf.zeros((224, 224, 3), dtype=tf.uint8)
- augmenter = augment.AutoAugment(policies=self._generate_test_policy())
- aug_image = augmenter.distort(image)
-
- self.assertEqual((224, 224, 3), aug_image.shape)
-
- @parameterized.named_parameters(
- {'testcase_name': '_OutOfRangeProb',
- 'sub_policy': ('Equalize', 1.1, 3), 'value': '1.1'},
- {'testcase_name': '_OutOfRangeMag',
- 'sub_policy': ('Equalize', 0.9, 11), 'value': '11'},
- )
- def test_invalid_custom_sub_policy(self, sub_policy, value):
- """Test autoaugment with out-of-range values in the custom policy."""
- image = tf.zeros((224, 224, 3), dtype=tf.uint8)
- policy = self._generate_test_policy()
- policy[0][0] = sub_policy
- augmenter = augment.AutoAugment(policies=policy)
-
- with self.assertRaisesRegex(
- tf.errors.InvalidArgumentError,
- r'Expected \'tf.Tensor\(False, shape=\(\), dtype=bool\)\' to be true. '
- r'Summarized data: ({})'.format(value)):
- augmenter.distort(image)
-
- def test_invalid_custom_policy_ndim(self):
- """Test autoaugment with wrong dimension in the custom policy."""
- policy = [[('Equalize', 0.8, 1), ('Shear', 0.8, 4)],
- [('TranslateY', 0.6, 3), ('Rotate', 0.9, 3)]]
- policy = [[policy]]
-
- with self.assertRaisesRegex(
- ValueError,
- r'Expected \(:, :, 3\) but got \(1, 1, 2, 2, 3\).'):
- augment.AutoAugment(policies=policy)
-
- def test_invalid_custom_policy_shape(self):
- """Test autoaugment with wrong shape in the custom policy."""
- policy = [[('Equalize', 0.8, 1, 1), ('Shear', 0.8, 4, 1)],
- [('TranslateY', 0.6, 3, 1), ('Rotate', 0.9, 3, 1)]]
-
- with self.assertRaisesRegex(
- ValueError,
- r'Expected \(:, :, 3\) but got \(2, 2, 4\)'):
- augment.AutoAugment(policies=policy)
-
- def test_invalid_custom_policy_key(self):
- """Test autoaugment with invalid key in the custom policy."""
- image = tf.zeros((224, 224, 3), dtype=tf.uint8)
- policy = [[('AAAAA', 0.8, 1), ('Shear', 0.8, 4)],
- [('TranslateY', 0.6, 3), ('Rotate', 0.9, 3)]]
- augmenter = augment.AutoAugment(policies=policy)
-
- with self.assertRaisesRegex(KeyError, '\'AAAAA\''):
- augmenter.distort(image)
-
-
-class RandomErasingTest(tf.test.TestCase, parameterized.TestCase):
-
- def test_random_erase_replaces_some_pixels(self):
- image = tf.zeros((224, 224, 3), dtype=tf.float32)
- augmenter = augment.RandomErasing(probability=1., max_count=10)
-
- aug_image = augmenter.distort(image)
-
- self.assertEqual((224, 224, 3), aug_image.shape)
- self.assertNotEqual(0, tf.reduce_max(aug_image))
-
-
-@parameterized.named_parameters([
- ('float16_images', tf.float16),
- ('bfloat16_images', tf.bfloat16),
- ('float32_images', tf.float32),
-])
-class MixupAndCutmixTest(parameterized.TestCase, tf.test.TestCase):
-
- def test_mixup_and_cutmix_smoothes_labels(self, image_dtype):
- batch_size = 12
- num_classes = 1000
- label_smoothing = 0.1
-
- images = tf.random.normal((batch_size, 224, 224, 3), dtype=image_dtype)
- labels = tf.range(batch_size)
- augmenter = augment.MixupAndCutmix(
- num_classes=num_classes, label_smoothing=label_smoothing)
-
- aug_images, aug_labels = augmenter.distort(images, labels)
-
- self.assertEqual(images.shape, aug_images.shape)
- self.assertEqual(images.dtype, aug_images.dtype)
- self.assertEqual([batch_size, num_classes], aug_labels.shape)
- self.assertAllLessEqual(aug_labels, 1. - label_smoothing +
- 2. / num_classes) # With tolerance
- self.assertAllGreaterEqual(aug_labels, label_smoothing / num_classes -
- 1e4) # With tolerance
-
- def test_mixup_changes_image(self, image_dtype):
- batch_size = 12
- num_classes = 1000
- label_smoothing = 0.1
-
- images = tf.random.normal((batch_size, 224, 224, 3), dtype=image_dtype)
- labels = tf.range(batch_size)
- augmenter = augment.MixupAndCutmix(
- mixup_alpha=1., cutmix_alpha=0., num_classes=num_classes)
-
- aug_images, aug_labels = augmenter.distort(images, labels)
-
- self.assertEqual(images.shape, aug_images.shape)
- self.assertEqual(images.dtype, aug_images.dtype)
- self.assertEqual([batch_size, num_classes], aug_labels.shape)
- self.assertAllLessEqual(aug_labels, 1. - label_smoothing +
- 2. / num_classes) # With tolerance
- self.assertAllGreaterEqual(aug_labels, label_smoothing / num_classes -
- 1e4) # With tolerance
- self.assertFalse(tf.math.reduce_all(images == aug_images))
-
- def test_cutmix_changes_image(self, image_dtype):
- batch_size = 12
- num_classes = 1000
- label_smoothing = 0.1
-
- images = tf.random.normal((batch_size, 224, 224, 3), dtype=image_dtype)
- labels = tf.range(batch_size)
- augmenter = augment.MixupAndCutmix(
- mixup_alpha=0., cutmix_alpha=1., num_classes=num_classes)
-
- aug_images, aug_labels = augmenter.distort(images, labels)
-
- self.assertEqual(images.shape, aug_images.shape)
- self.assertEqual(images.dtype, aug_images.dtype)
- self.assertEqual([batch_size, num_classes], aug_labels.shape)
- self.assertAllLessEqual(aug_labels, 1. - label_smoothing +
- 2. / num_classes) # With tolerance
- self.assertAllGreaterEqual(aug_labels, label_smoothing / num_classes -
- 1e4) # With tolerance
- self.assertFalse(tf.math.reduce_all(images == aug_images))
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/ops/box_matcher.py b/official/vision/beta/ops/box_matcher.py
deleted file mode 100644
index 9c38ad7feff0f0df773a11921071318b935f83ab..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/box_matcher.py
+++ /dev/null
@@ -1,191 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-
-"""Box matcher implementation."""
-
-
-import tensorflow as tf
-
-
-class BoxMatcher:
- """Matcher based on highest value.
-
- This class computes matches from a similarity matrix. Each column is matched
- to a single row.
-
- To support object detection target assignment this class enables setting both
- positive_threshold (upper threshold) and negative_threshold (lower thresholds)
- defining three categories of similarity which define whether examples are
- positive, negative, or ignored, for example:
- (1) thresholds=[negative_threshold, positive_threshold], and
- indicators=[negative_value, ignore_value, positive_value]: The similarity
- metrics below negative_threshold will be assigned with negative_value,
- the metrics between negative_threshold and positive_threshold will be
- assigned ignore_value, and the metrics above positive_threshold will be
- assigned positive_value.
- (2) thresholds=[negative_threshold, positive_threshold], and
- indicators=[ignore_value, negative_value, positive_value]: The similarity
- metric below negative_threshold will be assigned with ignore_value,
- the metrics between negative_threshold and positive_threshold will be
- assigned negative_value, and the metrics above positive_threshold will be
- assigned positive_value.
- """
-
- def __init__(self, thresholds, indicators, force_match_for_each_col=False):
- """Construct BoxMatcher.
-
- Args:
- thresholds: A list of thresholds to classify boxes into
- different buckets. The list needs to be sorted, and will be prepended
- with -Inf and appended with +Inf.
- indicators: A list of values to assign for each bucket. len(`indicators`)
- must equal to len(`thresholds`) + 1.
- force_match_for_each_col: If True, ensures that each column is matched to
- at least one row (which is not guaranteed otherwise if the
- positive_threshold is high). Defaults to False. If True, all force
- matched row will be assigned to `indicators[-1]`.
-
- Raises:
- ValueError: If `threshold` not sorted,
- or len(indicators) != len(threshold) + 1
- """
- if not all([lo <= hi for (lo, hi) in zip(thresholds[:-1], thresholds[1:])]):
- raise ValueError('`threshold` must be sorted, got {}'.format(thresholds))
- self.indicators = indicators
- if len(indicators) != len(thresholds) + 1:
- raise ValueError('len(`indicators`) must be len(`thresholds`) + 1, got '
- 'indicators {}, thresholds {}'.format(
- indicators, thresholds))
- thresholds = thresholds[:]
- thresholds.insert(0, -float('inf'))
- thresholds.append(float('inf'))
- self.thresholds = thresholds
- self._force_match_for_each_col = force_match_for_each_col
-
- def __call__(self, similarity_matrix):
- """Tries to match each column of the similarity matrix to a row.
-
- Args:
- similarity_matrix: A float tensor of shape [N, M] representing any
- similarity metric.
-
- Returns:
- A integer tensor of shape [N] with corresponding match indices for each
- of M columns, for positive match, the match result will be the
- corresponding row index, for negative match, the match will be
- `negative_value`, for ignored match, the match result will be
- `ignore_value`.
- """
- squeeze_result = False
- if len(similarity_matrix.shape) == 2:
- squeeze_result = True
- similarity_matrix = tf.expand_dims(similarity_matrix, axis=0)
-
- static_shape = similarity_matrix.shape.as_list()
- num_rows = static_shape[1] or tf.shape(similarity_matrix)[1]
- batch_size = static_shape[0] or tf.shape(similarity_matrix)[0]
-
- def _match_when_rows_are_empty():
- """Performs matching when the rows of similarity matrix are empty.
-
- When the rows are empty, all detections are false positives. So we return
- a tensor of -1's to indicate that the columns do not match to any rows.
-
- Returns:
- matches: int32 tensor indicating the row each column matches to.
- """
- with tf.name_scope('empty_gt_boxes'):
- matches = tf.zeros([batch_size, num_rows], dtype=tf.int32)
- match_labels = -tf.ones([batch_size, num_rows], dtype=tf.int32)
- return matches, match_labels
-
- def _match_when_rows_are_non_empty():
- """Performs matching when the rows of similarity matrix are non empty.
-
- Returns:
- matches: int32 tensor indicating the row each column matches to.
- """
- # Matches for each column
- with tf.name_scope('non_empty_gt_boxes'):
- matches = tf.argmax(similarity_matrix, axis=-1, output_type=tf.int32)
-
- # Get logical indices of ignored and unmatched columns as tf.int64
- matched_vals = tf.reduce_max(similarity_matrix, axis=-1)
- matched_indicators = tf.zeros([batch_size, num_rows], tf.int32)
-
- match_dtype = matched_vals.dtype
- for (ind, low, high) in zip(self.indicators, self.thresholds[:-1],
- self.thresholds[1:]):
- low_threshold = tf.cast(low, match_dtype)
- high_threshold = tf.cast(high, match_dtype)
- mask = tf.logical_and(
- tf.greater_equal(matched_vals, low_threshold),
- tf.less(matched_vals, high_threshold))
- matched_indicators = self._set_values_using_indicator(
- matched_indicators, mask, ind)
-
- if self._force_match_for_each_col:
- # [batch_size, M], for each col (groundtruth_box), find the best
- # matching row (anchor).
- force_match_column_ids = tf.argmax(
- input=similarity_matrix, axis=1, output_type=tf.int32)
- # [batch_size, M, N]
- force_match_column_indicators = tf.one_hot(
- force_match_column_ids, depth=num_rows)
- # [batch_size, N], for each row (anchor), find the largest column
- # index for groundtruth box
- force_match_row_ids = tf.argmax(
- input=force_match_column_indicators, axis=1, output_type=tf.int32)
- # [batch_size, N]
- force_match_column_mask = tf.cast(
- tf.reduce_max(force_match_column_indicators, axis=1),
- tf.bool)
- # [batch_size, N]
- final_matches = tf.where(force_match_column_mask, force_match_row_ids,
- matches)
- final_matched_indicators = tf.where(
- force_match_column_mask, self.indicators[-1] *
- tf.ones([batch_size, num_rows], dtype=tf.int32),
- matched_indicators)
- return final_matches, final_matched_indicators
- else:
- return matches, matched_indicators
-
- num_gt_boxes = similarity_matrix.shape.as_list()[-1] or tf.shape(
- similarity_matrix)[-1]
- result_match, result_matched_indicators = tf.cond(
- pred=tf.greater(num_gt_boxes, 0),
- true_fn=_match_when_rows_are_non_empty,
- false_fn=_match_when_rows_are_empty)
-
- if squeeze_result:
- result_match = tf.squeeze(result_match, axis=0)
- result_matched_indicators = tf.squeeze(result_matched_indicators, axis=0)
-
- return result_match, result_matched_indicators
-
- def _set_values_using_indicator(self, x, indicator, val):
- """Set the indicated fields of x to val.
-
- Args:
- x: tensor.
- indicator: boolean with same shape as x.
- val: scalar with value to set.
-
- Returns:
- modified tensor.
- """
- indicator = tf.cast(indicator, x.dtype)
- return tf.add(tf.multiply(x, 1 - indicator), val * indicator)
diff --git a/official/vision/beta/ops/box_matcher_test.py b/official/vision/beta/ops/box_matcher_test.py
deleted file mode 100644
index 0048b0e47e697ce49c200d77e2489d16602b1d16..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/box_matcher_test.py
+++ /dev/null
@@ -1,78 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for box_matcher.py."""
-
-import tensorflow as tf
-
-from official.vision.beta.ops import box_matcher
-
-
-class BoxMatcherTest(tf.test.TestCase):
-
- def test_box_matcher_unbatched(self):
- sim_matrix = tf.constant(
- [[0.04, 0, 0, 0],
- [0, 0, 1., 0]],
- dtype=tf.float32)
-
- fg_threshold = 0.5
- bg_thresh_hi = 0.2
- bg_thresh_lo = 0.0
-
- matcher = box_matcher.BoxMatcher(
- thresholds=[bg_thresh_lo, bg_thresh_hi, fg_threshold],
- indicators=[-3, -2, -1, 1])
- match_indices, match_indicators = matcher(sim_matrix)
- positive_matches = tf.greater_equal(match_indicators, 0)
- negative_matches = tf.equal(match_indicators, -2)
-
- self.assertAllEqual(
- positive_matches.numpy(), [False, True])
- self.assertAllEqual(
- negative_matches.numpy(), [True, False])
- self.assertAllEqual(
- match_indices.numpy(), [0, 2])
- self.assertAllEqual(
- match_indicators.numpy(), [-2, 1])
-
- def test_box_matcher_batched(self):
- sim_matrix = tf.constant(
- [[[0.04, 0, 0, 0],
- [0, 0, 1., 0]]],
- dtype=tf.float32)
-
- fg_threshold = 0.5
- bg_thresh_hi = 0.2
- bg_thresh_lo = 0.0
-
- matcher = box_matcher.BoxMatcher(
- thresholds=[bg_thresh_lo, bg_thresh_hi, fg_threshold],
- indicators=[-3, -2, -1, 1])
- match_indices, match_indicators = matcher(sim_matrix)
- positive_matches = tf.greater_equal(match_indicators, 0)
- negative_matches = tf.equal(match_indicators, -2)
-
- self.assertAllEqual(
- positive_matches.numpy(), [[False, True]])
- self.assertAllEqual(
- negative_matches.numpy(), [[True, False]])
- self.assertAllEqual(
- match_indices.numpy(), [[0, 2]])
- self.assertAllEqual(
- match_indicators.numpy(), [[-2, 1]])
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/ops/box_ops.py b/official/vision/beta/ops/box_ops.py
deleted file mode 100644
index 2868881f80ee114d575b108b8347587aa26b5e3d..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/box_ops.py
+++ /dev/null
@@ -1,763 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Box related ops."""
-
-# Import libraries
-import numpy as np
-import tensorflow as tf
-
-
-EPSILON = 1e-8
-BBOX_XFORM_CLIP = np.log(1000. / 16.)
-
-
-def yxyx_to_xywh(boxes):
- """Converts boxes from ymin, xmin, ymax, xmax to xmin, ymin, width, height.
-
- Args:
- boxes: a numpy array whose last dimension is 4 representing the coordinates
- of boxes in ymin, xmin, ymax, xmax order.
-
- Returns:
- boxes: a numpy array whose shape is the same as `boxes` in new format.
-
- Raises:
- ValueError: If the last dimension of boxes is not 4.
- """
- if boxes.shape[-1] != 4:
- raise ValueError(
- 'boxes.shape[-1] is {:d}, but must be 4.'.format(boxes.shape[-1]))
-
- boxes_ymin = boxes[..., 0]
- boxes_xmin = boxes[..., 1]
- boxes_width = boxes[..., 3] - boxes[..., 1]
- boxes_height = boxes[..., 2] - boxes[..., 0]
- new_boxes = np.stack(
- [boxes_xmin, boxes_ymin, boxes_width, boxes_height], axis=-1)
-
- return new_boxes
-
-
-def yxyx_to_cycxhw(boxes):
- """Converts box corner coordinates to center plus height and width terms.
-
- Args:
- boxes: a `Tensor` with last dimension of 4, representing the coordinates of
- boxes in ymin, xmin, ymax, xmax order.
-
- Returns:
- boxes: a `Tensor` with the same shape as the inputted boxes, in the format
- of cy, cx, height, width.
-
- Raises:
- ValueError: if the last dimension of boxes is not 4.
- """
- if boxes.shape[-1] != 4:
- raise ValueError('Last dimension of boxes must be 4 but is {:d}'.format(
- boxes.shape[-1]))
-
- boxes_ycenter = (boxes[..., 0] + boxes[..., 2]) / 2
- boxes_xcenter = (boxes[..., 1] + boxes[..., 3]) / 2
- boxes_height = boxes[..., 2] - boxes[..., 0]
- boxes_width = boxes[..., 3] - boxes[..., 1]
-
- new_boxes = tf.stack(
- [boxes_ycenter, boxes_xcenter, boxes_height, boxes_width], axis=-1)
- return new_boxes
-
-
-def cycxhw_to_yxyx(boxes):
- """Converts box center coordinates plus height and width terms to corner.
-
- Args:
- boxes: a numpy array whose last dimension is 4 representing the coordinates
- of boxes in cy, cx, height, width order.
-
- Returns:
- boxes: a numpy array whose shape is the same as `boxes` in new format.
-
- Raises:
- ValueError: If the last dimension of boxes is not 4.
- """
- if boxes.shape[-1] != 4:
- raise ValueError(
- 'boxes.shape[-1] is {:d}, but must be 4.'.format(boxes.shape[-1]))
-
- boxes_ymin = boxes[..., 0] - boxes[..., 2] / 2
- boxes_xmin = boxes[..., 1] - boxes[..., 3] / 2
- boxes_ymax = boxes[..., 0] + boxes[..., 2] / 2
- boxes_xmax = boxes[..., 1] + boxes[..., 3] / 2
- new_boxes = tf.stack([
- boxes_ymin, boxes_xmin, boxes_ymax, boxes_xmax], axis=-1)
- return new_boxes
-
-
-def jitter_boxes(boxes, noise_scale=0.025):
- """Jitter the box coordinates by some noise distribution.
-
- Args:
- boxes: a tensor whose last dimension is 4 representing the coordinates of
- boxes in ymin, xmin, ymax, xmax order.
- noise_scale: a python float which specifies the magnitude of noise. The rule
- of thumb is to set this between (0, 0.1]. The default value is found to
- mimic the noisy detections best empirically.
-
- Returns:
- jittered_boxes: a tensor whose shape is the same as `boxes` representing
- the jittered boxes.
-
- Raises:
- ValueError: If the last dimension of boxes is not 4.
- """
- if boxes.shape[-1] != 4:
- raise ValueError(
- 'boxes.shape[-1] is {:d}, but must be 4.'.format(boxes.shape[-1]))
-
- with tf.name_scope('jitter_boxes'):
- bbox_jitters = tf.random.normal(tf.shape(boxes), stddev=noise_scale)
- ymin = boxes[..., 0:1]
- xmin = boxes[..., 1:2]
- ymax = boxes[..., 2:3]
- xmax = boxes[..., 3:4]
- width = xmax - xmin
- height = ymax - ymin
- new_center_x = (xmin + xmax) / 2.0 + bbox_jitters[..., 0:1] * width
- new_center_y = (ymin + ymax) / 2.0 + bbox_jitters[..., 1:2] * height
- new_width = width * tf.math.exp(bbox_jitters[..., 2:3])
- new_height = height * tf.math.exp(bbox_jitters[..., 3:4])
- jittered_boxes = tf.concat(
- [new_center_y - new_height * 0.5, new_center_x - new_width * 0.5,
- new_center_y + new_height * 0.5, new_center_x + new_width * 0.5],
- axis=-1)
-
- return jittered_boxes
-
-
-def normalize_boxes(boxes, image_shape):
- """Converts boxes to the normalized coordinates.
-
- Args:
- boxes: a tensor whose last dimension is 4 representing the coordinates
- of boxes in ymin, xmin, ymax, xmax order.
- image_shape: a list of two integers, a two-element vector or a tensor such
- that all but the last dimensions are `broadcastable` to `boxes`. The last
- dimension is 2, which represents [height, width].
-
- Returns:
- normalized_boxes: a tensor whose shape is the same as `boxes` representing
- the normalized boxes.
-
- Raises:
- ValueError: If the last dimension of boxes is not 4.
- """
- if boxes.shape[-1] != 4:
- raise ValueError(
- 'boxes.shape[-1] is {:d}, but must be 4.'.format(boxes.shape[-1]))
-
- with tf.name_scope('normalize_boxes'):
- if isinstance(image_shape, list) or isinstance(image_shape, tuple):
- height, width = image_shape
- else:
- image_shape = tf.cast(image_shape, dtype=boxes.dtype)
- height = image_shape[..., 0:1]
- width = image_shape[..., 1:2]
-
- ymin = boxes[..., 0:1] / height
- xmin = boxes[..., 1:2] / width
- ymax = boxes[..., 2:3] / height
- xmax = boxes[..., 3:4] / width
-
- normalized_boxes = tf.concat([ymin, xmin, ymax, xmax], axis=-1)
- return normalized_boxes
-
-
-def denormalize_boxes(boxes, image_shape):
- """Converts boxes normalized by [height, width] to pixel coordinates.
-
- Args:
- boxes: a tensor whose last dimension is 4 representing the coordinates
- of boxes in ymin, xmin, ymax, xmax order.
- image_shape: a list of two integers, a two-element vector or a tensor such
- that all but the last dimensions are `broadcastable` to `boxes`. The last
- dimension is 2, which represents [height, width].
-
- Returns:
- denormalized_boxes: a tensor whose shape is the same as `boxes` representing
- the denormalized boxes.
-
- Raises:
- ValueError: If the last dimension of boxes is not 4.
- """
- with tf.name_scope('denormalize_boxes'):
- if isinstance(image_shape, list) or isinstance(image_shape, tuple):
- height, width = image_shape
- else:
- image_shape = tf.cast(image_shape, dtype=boxes.dtype)
- height, width = tf.split(image_shape, 2, axis=-1)
-
- ymin, xmin, ymax, xmax = tf.split(boxes, 4, axis=-1)
- ymin = ymin * height
- xmin = xmin * width
- ymax = ymax * height
- xmax = xmax * width
-
- denormalized_boxes = tf.concat([ymin, xmin, ymax, xmax], axis=-1)
- return denormalized_boxes
-
-
-def clip_boxes(boxes, image_shape):
- """Clips boxes to image boundaries.
-
- Args:
- boxes: a tensor whose last dimension is 4 representing the coordinates
- of boxes in ymin, xmin, ymax, xmax order.
- image_shape: a list of two integers, a two-element vector or a tensor such
- that all but the last dimensions are `broadcastable` to `boxes`. The last
- dimension is 2, which represents [height, width].
-
- Returns:
- clipped_boxes: a tensor whose shape is the same as `boxes` representing the
- clipped boxes.
-
- Raises:
- ValueError: If the last dimension of boxes is not 4.
- """
- if boxes.shape[-1] != 4:
- raise ValueError(
- 'boxes.shape[-1] is {:d}, but must be 4.'.format(boxes.shape[-1]))
-
- with tf.name_scope('clip_boxes'):
- if isinstance(image_shape, list) or isinstance(image_shape, tuple):
- height, width = image_shape
- max_length = [height, width, height, width]
- else:
- image_shape = tf.cast(image_shape, dtype=boxes.dtype)
- height, width = tf.unstack(image_shape, axis=-1)
- max_length = tf.stack([height, width, height, width], axis=-1)
-
- clipped_boxes = tf.math.maximum(tf.math.minimum(boxes, max_length), 0.0)
- return clipped_boxes
-
-
-def compute_outer_boxes(boxes, image_shape, scale=1.0):
- """Compute outer box encloses an object with a margin.
-
- Args:
- boxes: a tensor whose last dimension is 4 representing the coordinates of
- boxes in ymin, xmin, ymax, xmax order.
- image_shape: a list of two integers, a two-element vector or a tensor such
- that all but the last dimensions are `broadcastable` to `boxes`. The last
- dimension is 2, which represents [height, width].
- scale: a float number specifying the scale of output outer boxes to input
- `boxes`.
-
- Returns:
- outer_boxes: a tensor whose shape is the same as `boxes` representing the
- outer boxes.
- """
- if scale < 1.0:
- raise ValueError(
- 'scale is {}, but outer box scale must be greater than 1.0.'.format(
- scale))
- centers_y = (boxes[..., 0] + boxes[..., 2]) / 2.0
- centers_x = (boxes[..., 1] + boxes[..., 3]) / 2.0
- box_height = (boxes[..., 2] - boxes[..., 0]) * scale
- box_width = (boxes[..., 3] - boxes[..., 1]) * scale
- outer_boxes = tf.stack(
- [centers_y - box_height / 2.0, centers_x - box_width / 2.0,
- centers_y + box_height / 2.0, centers_x + box_width / 2.0],
- axis=1)
- outer_boxes = clip_boxes(outer_boxes, image_shape)
- return outer_boxes
-
-
-def encode_boxes(boxes, anchors, weights=None):
- """Encode boxes to targets.
-
- Args:
- boxes: a tensor whose last dimension is 4 representing the coordinates
- of boxes in ymin, xmin, ymax, xmax order.
- anchors: a tensor whose shape is the same as, or `broadcastable` to `boxes`,
- representing the coordinates of anchors in ymin, xmin, ymax, xmax order.
- weights: None or a list of four float numbers used to scale coordinates.
-
- Returns:
- encoded_boxes: a tensor whose shape is the same as `boxes` representing the
- encoded box targets.
-
- Raises:
- ValueError: If the last dimension of boxes is not 4.
- """
- if boxes.shape[-1] != 4:
- raise ValueError(
- 'boxes.shape[-1] is {:d}, but must be 4.'.format(boxes.shape[-1]))
-
- with tf.name_scope('encode_boxes'):
- boxes = tf.cast(boxes, dtype=anchors.dtype)
- ymin = boxes[..., 0:1]
- xmin = boxes[..., 1:2]
- ymax = boxes[..., 2:3]
- xmax = boxes[..., 3:4]
- box_h = ymax - ymin
- box_w = xmax - xmin
- box_yc = ymin + 0.5 * box_h
- box_xc = xmin + 0.5 * box_w
-
- anchor_ymin = anchors[..., 0:1]
- anchor_xmin = anchors[..., 1:2]
- anchor_ymax = anchors[..., 2:3]
- anchor_xmax = anchors[..., 3:4]
- anchor_h = anchor_ymax - anchor_ymin
- anchor_w = anchor_xmax - anchor_xmin
- anchor_yc = anchor_ymin + 0.5 * anchor_h
- anchor_xc = anchor_xmin + 0.5 * anchor_w
-
- encoded_dy = (box_yc - anchor_yc) / anchor_h
- encoded_dx = (box_xc - anchor_xc) / anchor_w
- encoded_dh = tf.math.log(box_h / anchor_h)
- encoded_dw = tf.math.log(box_w / anchor_w)
- if weights:
- encoded_dy *= weights[0]
- encoded_dx *= weights[1]
- encoded_dh *= weights[2]
- encoded_dw *= weights[3]
-
- encoded_boxes = tf.concat(
- [encoded_dy, encoded_dx, encoded_dh, encoded_dw], axis=-1)
- return encoded_boxes
-
-
-def decode_boxes(encoded_boxes, anchors, weights=None):
- """Decode boxes.
-
- Args:
- encoded_boxes: a tensor whose last dimension is 4 representing the
- coordinates of encoded boxes in ymin, xmin, ymax, xmax order.
- anchors: a tensor whose shape is the same as, or `broadcastable` to `boxes`,
- representing the coordinates of anchors in ymin, xmin, ymax, xmax order.
- weights: None or a list of four float numbers used to scale coordinates.
-
- Returns:
- encoded_boxes: a tensor whose shape is the same as `boxes` representing the
- decoded box targets.
- """
- if encoded_boxes.shape[-1] != 4:
- raise ValueError(
- 'encoded_boxes.shape[-1] is {:d}, but must be 4.'
- .format(encoded_boxes.shape[-1]))
-
- with tf.name_scope('decode_boxes'):
- encoded_boxes = tf.cast(encoded_boxes, dtype=anchors.dtype)
- dy = encoded_boxes[..., 0:1]
- dx = encoded_boxes[..., 1:2]
- dh = encoded_boxes[..., 2:3]
- dw = encoded_boxes[..., 3:4]
- if weights:
- dy /= weights[0]
- dx /= weights[1]
- dh /= weights[2]
- dw /= weights[3]
- dh = tf.math.minimum(dh, BBOX_XFORM_CLIP)
- dw = tf.math.minimum(dw, BBOX_XFORM_CLIP)
-
- anchor_ymin = anchors[..., 0:1]
- anchor_xmin = anchors[..., 1:2]
- anchor_ymax = anchors[..., 2:3]
- anchor_xmax = anchors[..., 3:4]
- anchor_h = anchor_ymax - anchor_ymin
- anchor_w = anchor_xmax - anchor_xmin
- anchor_yc = anchor_ymin + 0.5 * anchor_h
- anchor_xc = anchor_xmin + 0.5 * anchor_w
-
- decoded_boxes_yc = dy * anchor_h + anchor_yc
- decoded_boxes_xc = dx * anchor_w + anchor_xc
- decoded_boxes_h = tf.math.exp(dh) * anchor_h
- decoded_boxes_w = tf.math.exp(dw) * anchor_w
-
- decoded_boxes_ymin = decoded_boxes_yc - 0.5 * decoded_boxes_h
- decoded_boxes_xmin = decoded_boxes_xc - 0.5 * decoded_boxes_w
- decoded_boxes_ymax = decoded_boxes_ymin + decoded_boxes_h
- decoded_boxes_xmax = decoded_boxes_xmin + decoded_boxes_w
-
- decoded_boxes = tf.concat(
- [decoded_boxes_ymin, decoded_boxes_xmin,
- decoded_boxes_ymax, decoded_boxes_xmax],
- axis=-1)
- return decoded_boxes
-
-
-def filter_boxes(boxes, scores, image_shape, min_size_threshold):
- """Filter and remove boxes that are too small or fall outside the image.
-
- Args:
- boxes: a tensor whose last dimension is 4 representing the coordinates of
- boxes in ymin, xmin, ymax, xmax order.
- scores: a tensor whose shape is the same as tf.shape(boxes)[:-1]
- representing the original scores of the boxes.
- image_shape: a tensor whose shape is the same as, or `broadcastable` to
- `boxes` except the last dimension, which is 2, representing [height,
- width] of the scaled image.
- min_size_threshold: a float representing the minimal box size in each side
- (w.r.t. the scaled image). Boxes whose sides are smaller than it will be
- filtered out.
-
- Returns:
- filtered_boxes: a tensor whose shape is the same as `boxes` but with
- the position of the filtered boxes are filled with 0.
- filtered_scores: a tensor whose shape is the same as 'scores' but with
- the positinon of the filtered boxes filled with 0.
- """
- if boxes.shape[-1] != 4:
- raise ValueError(
- 'boxes.shape[1] is {:d}, but must be 4.'.format(boxes.shape[-1]))
-
- with tf.name_scope('filter_boxes'):
- if isinstance(image_shape, list) or isinstance(image_shape, tuple):
- height, width = image_shape
- else:
- image_shape = tf.cast(image_shape, dtype=boxes.dtype)
- height = image_shape[..., 0]
- width = image_shape[..., 1]
-
- ymin = boxes[..., 0]
- xmin = boxes[..., 1]
- ymax = boxes[..., 2]
- xmax = boxes[..., 3]
-
- h = ymax - ymin
- w = xmax - xmin
- yc = ymin + 0.5 * h
- xc = xmin + 0.5 * w
-
- min_size = tf.cast(
- tf.math.maximum(min_size_threshold, 0.0), dtype=boxes.dtype)
-
- filtered_size_mask = tf.math.logical_and(
- tf.math.greater(h, min_size), tf.math.greater(w, min_size))
- filtered_center_mask = tf.logical_and(
- tf.math.logical_and(tf.math.greater(yc, 0.0), tf.math.less(yc, height)),
- tf.math.logical_and(tf.math.greater(xc, 0.0), tf.math.less(xc, width)))
- filtered_mask = tf.math.logical_and(
- filtered_size_mask, filtered_center_mask)
-
- filtered_scores = tf.where(filtered_mask, scores, tf.zeros_like(scores))
- filtered_boxes = tf.cast(
- tf.expand_dims(filtered_mask, axis=-1), dtype=boxes.dtype) * boxes
- return filtered_boxes, filtered_scores
-
-
-def filter_boxes_by_scores(boxes, scores, min_score_threshold):
- """Filter and remove boxes whose scores are smaller than the threshold.
-
- Args:
- boxes: a tensor whose last dimension is 4 representing the coordinates of
- boxes in ymin, xmin, ymax, xmax order.
- scores: a tensor whose shape is the same as tf.shape(boxes)[:-1]
- representing the original scores of the boxes.
- min_score_threshold: a float representing the minimal box score threshold.
- Boxes whose score are smaller than it will be filtered out.
-
- Returns:
- filtered_boxes: a tensor whose shape is the same as `boxes` but with
- the position of the filtered boxes are filled with -1.
- filtered_scores: a tensor whose shape is the same as 'scores' but with
- the
- """
- if boxes.shape[-1] != 4:
- raise ValueError('boxes.shape[1] is {:d}, but must be 4.'.format(
- boxes.shape[-1]))
-
- with tf.name_scope('filter_boxes_by_scores'):
- filtered_mask = tf.math.greater(scores, min_score_threshold)
- filtered_scores = tf.where(filtered_mask, scores, -tf.ones_like(scores))
- filtered_boxes = tf.cast(
- tf.expand_dims(filtered_mask, axis=-1), dtype=boxes.dtype) * boxes
-
- return filtered_boxes, filtered_scores
-
-
-def gather_instances(selected_indices, instances, *aux_instances):
- """Gather instances by indices.
-
- Args:
- selected_indices: a Tensor of shape [batch, K] which indicates the selected
- indices in instance dimension (2nd dimension).
- instances: a Tensor of shape [batch, N, ...] where the 2nd dimension is
- the instance dimension to be selected from.
- *aux_instances: the additional Tensors whose shapes are in [batch, N, ...]
- which are the tensors to be selected from using the `selected_indices`.
-
- Returns:
- selected_instances: the tensor of shape [batch, K, ...] which corresponds to
- the selected instances of the `instances` tensor.
- selected_aux_instances: the additional tensors of shape [batch, K, ...]
- which corresponds to the selected instances of the `aus_instances`
- tensors.
- """
- batch_size = instances.shape[0]
- if batch_size == 1:
- selected_instances = tf.squeeze(
- tf.gather(instances, selected_indices, axis=1), axis=1)
- if aux_instances:
- selected_aux_instances = [
- tf.squeeze(
- tf.gather(a, selected_indices, axis=1), axis=1)
- for a in aux_instances
- ]
- return tuple([selected_instances] + selected_aux_instances)
- else:
- return selected_instances
- else:
- indices_shape = tf.shape(selected_indices)
- batch_indices = (
- tf.expand_dims(tf.range(indices_shape[0]), axis=-1) *
- tf.ones([1, indices_shape[-1]], dtype=tf.int32))
- gather_nd_indices = tf.stack(
- [batch_indices, selected_indices], axis=-1)
- selected_instances = tf.gather_nd(instances, gather_nd_indices)
- if aux_instances:
- selected_aux_instances = [
- tf.gather_nd(a, gather_nd_indices) for a in aux_instances
- ]
- return tuple([selected_instances] + selected_aux_instances)
- else:
- return selected_instances
-
-
-def top_k_boxes(boxes, scores, k):
- """Sort and select top k boxes according to the scores.
-
- Args:
- boxes: a tensor of shape [batch_size, N, 4] representing the coordinate of
- the boxes. N is the number of boxes per image.
- scores: a tensor of shsape [batch_size, N] representing the socre of the
- boxes.
- k: an integer or a tensor indicating the top k number.
-
- Returns:
- selected_boxes: a tensor of shape [batch_size, k, 4] representing the
- selected top k box coordinates.
- selected_scores: a tensor of shape [batch_size, k] representing the selected
- top k box scores.
- """
- with tf.name_scope('top_k_boxes'):
- selected_scores, top_k_indices = tf.nn.top_k(scores, k=k, sorted=True)
- selected_boxes = gather_instances(top_k_indices, boxes)
- return selected_boxes, selected_scores
-
-
-def get_non_empty_box_indices(boxes):
- """Get indices for non-empty boxes."""
- # Selects indices if box height or width is 0.
- height = boxes[:, 2] - boxes[:, 0]
- width = boxes[:, 3] - boxes[:, 1]
- indices = tf.where(tf.logical_and(tf.greater(height, 0),
- tf.greater(width, 0)))
- return indices[:, 0]
-
-
-def bbox_overlap(boxes, gt_boxes):
- """Calculates the overlap between proposal and ground truth boxes.
-
- Some `boxes` or `gt_boxes` may have been padded. The returned `iou` tensor
- for these boxes will be -1.
-
- Args:
- boxes: a tensor with a shape of [batch_size, N, 4]. N is the number of
- proposals before groundtruth assignment (e.g., rpn_post_nms_topn). The
- last dimension is the pixel coordinates in [ymin, xmin, ymax, xmax] form.
- gt_boxes: a tensor with a shape of [batch_size, MAX_NUM_INSTANCES, 4]. This
- tensor might have paddings with a negative value.
-
- Returns:
- iou: a tensor with as a shape of [batch_size, N, MAX_NUM_INSTANCES].
- """
- with tf.name_scope('bbox_overlap'):
- bb_y_min, bb_x_min, bb_y_max, bb_x_max = tf.split(
- value=boxes, num_or_size_splits=4, axis=2)
- gt_y_min, gt_x_min, gt_y_max, gt_x_max = tf.split(
- value=gt_boxes, num_or_size_splits=4, axis=2)
-
- # Calculates the intersection area.
- i_xmin = tf.math.maximum(bb_x_min, tf.transpose(gt_x_min, [0, 2, 1]))
- i_xmax = tf.math.minimum(bb_x_max, tf.transpose(gt_x_max, [0, 2, 1]))
- i_ymin = tf.math.maximum(bb_y_min, tf.transpose(gt_y_min, [0, 2, 1]))
- i_ymax = tf.math.minimum(bb_y_max, tf.transpose(gt_y_max, [0, 2, 1]))
- i_area = (
- tf.math.maximum((i_xmax - i_xmin), 0) *
- tf.math.maximum((i_ymax - i_ymin), 0))
-
- # Calculates the union area.
- bb_area = (bb_y_max - bb_y_min) * (bb_x_max - bb_x_min)
- gt_area = (gt_y_max - gt_y_min) * (gt_x_max - gt_x_min)
- # Adds a small epsilon to avoid divide-by-zero.
- u_area = bb_area + tf.transpose(gt_area, [0, 2, 1]) - i_area + 1e-8
-
- # Calculates IoU.
- iou = i_area / u_area
-
- # Fills -1 for IoU entries between the padded ground truth boxes.
- gt_invalid_mask = tf.less(
- tf.reduce_max(gt_boxes, axis=-1, keepdims=True), 0.0)
- padding_mask = tf.logical_or(
- tf.zeros_like(bb_x_min, dtype=tf.bool),
- tf.transpose(gt_invalid_mask, [0, 2, 1]))
- iou = tf.where(padding_mask, -tf.ones_like(iou), iou)
-
- # Fills -1 for for invalid (-1) boxes.
- boxes_invalid_mask = tf.less(
- tf.reduce_max(boxes, axis=-1, keepdims=True), 0.0)
- iou = tf.where(boxes_invalid_mask, -tf.ones_like(iou), iou)
-
- return iou
-
-
-def bbox_generalized_overlap(boxes, gt_boxes):
- """Calculates the GIOU between proposal and ground truth boxes.
-
- The generalized intersection of union is an adjustment of the traditional IOU
- metric which provides continuous updates even for predictions with no overlap.
- This metric is defined in https://giou.stanford.edu/GIoU.pdf. Note, some
- `gt_boxes` may have been padded. The returned `giou` tensor for these boxes
- will be -1.
-
- Args:
- boxes: a `Tensor` with a shape of [batch_size, N, 4]. N is the number of
- proposals before groundtruth assignment (e.g., rpn_post_nms_topn). The
- last dimension is the pixel coordinates in [ymin, xmin, ymax, xmax] form.
- gt_boxes: a `Tensor` with a shape of [batch_size, max_num_instances, 4].
- This tensor may have paddings with a negative value and will also be in
- the [ymin, xmin, ymax, xmax] format.
-
- Returns:
- giou: a `Tensor` with as a shape of [batch_size, N, max_num_instances].
- """
- with tf.name_scope('bbox_generalized_overlap'):
- assert boxes.shape.as_list(
- )[-1] == 4, 'Boxes must be defined by 4 coordinates.'
- assert gt_boxes.shape.as_list(
- )[-1] == 4, 'Groundtruth boxes must be defined by 4 coordinates.'
-
- bb_y_min, bb_x_min, bb_y_max, bb_x_max = tf.split(
- value=boxes, num_or_size_splits=4, axis=2)
- gt_y_min, gt_x_min, gt_y_max, gt_x_max = tf.split(
- value=gt_boxes, num_or_size_splits=4, axis=2)
-
- # Calculates the hull area for each pair of boxes, with one from
- # boxes and the other from gt_boxes.
- # Outputs for coordinates are of shape [batch_size, N, max_num_instances]
- h_xmin = tf.minimum(bb_x_min, tf.transpose(gt_x_min, [0, 2, 1]))
- h_xmax = tf.maximum(bb_x_max, tf.transpose(gt_x_max, [0, 2, 1]))
- h_ymin = tf.minimum(bb_y_min, tf.transpose(gt_y_min, [0, 2, 1]))
- h_ymax = tf.maximum(bb_y_max, tf.transpose(gt_y_max, [0, 2, 1]))
- h_area = tf.maximum((h_xmax - h_xmin), 0) * tf.maximum((h_ymax - h_ymin), 0)
- # Add a small epsilon to avoid divide-by-zero.
- h_area = h_area + 1e-8
-
- # Calculates the intersection area.
- i_xmin = tf.maximum(bb_x_min, tf.transpose(gt_x_min, [0, 2, 1]))
- i_xmax = tf.minimum(bb_x_max, tf.transpose(gt_x_max, [0, 2, 1]))
- i_ymin = tf.maximum(bb_y_min, tf.transpose(gt_y_min, [0, 2, 1]))
- i_ymax = tf.minimum(bb_y_max, tf.transpose(gt_y_max, [0, 2, 1]))
- i_area = tf.maximum((i_xmax - i_xmin), 0) * tf.maximum((i_ymax - i_ymin), 0)
-
- # Calculates the union area.
- bb_area = (bb_y_max - bb_y_min) * (bb_x_max - bb_x_min)
- gt_area = (gt_y_max - gt_y_min) * (gt_x_max - gt_x_min)
-
- # Adds a small epsilon to avoid divide-by-zero.
- u_area = bb_area + tf.transpose(gt_area, [0, 2, 1]) - i_area + 1e-8
-
- # Calculates IoU.
- iou = i_area / u_area
- # Calculates GIoU.
- giou = iou - (h_area - u_area) / h_area
-
- # Fills -1 for GIoU entries between the padded ground truth boxes.
- gt_invalid_mask = tf.less(
- tf.reduce_max(gt_boxes, axis=-1, keepdims=True), 0.0)
- padding_mask = tf.broadcast_to(
- tf.transpose(gt_invalid_mask, [0, 2, 1]), tf.shape(giou))
- giou = tf.where(padding_mask, -tf.ones_like(giou), giou)
- return giou
-
-
-def box_matching(boxes, gt_boxes, gt_classes):
- """Match boxes to groundtruth boxes.
-
- Given the proposal boxes and the groundtruth boxes and classes, perform the
- groundtruth matching by taking the argmax of the IoU between boxes and
- groundtruth boxes.
-
- Args:
- boxes: a tensor of shape of [batch_size, N, 4] representing the box
- coordiantes to be matched to groundtruth boxes.
- gt_boxes: a tensor of shape of [batch_size, MAX_INSTANCES, 4] representing
- the groundtruth box coordinates. It is padded with -1s to indicate the
- invalid boxes.
- gt_classes: [batch_size, MAX_INSTANCES] representing the groundtruth box
- classes. It is padded with -1s to indicate the invalid classes.
-
- Returns:
- matched_gt_boxes: a tensor of shape of [batch_size, N, 4], representing
- the matched groundtruth box coordinates for each input box. If the box
- does not overlap with any groundtruth boxes, the matched boxes of it
- will be set to all 0s.
- matched_gt_classes: a tensor of shape of [batch_size, N], representing
- the matched groundtruth classes for each input box. If the box does not
- overlap with any groundtruth boxes, the matched box classes of it will
- be set to 0, which corresponds to the background class.
- matched_gt_indices: a tensor of shape of [batch_size, N], representing
- the indices of the matched groundtruth boxes in the original gt_boxes
- tensor. If the box does not overlap with any groundtruth boxes, the
- index of the matched groundtruth will be set to -1.
- matched_iou: a tensor of shape of [batch_size, N], representing the IoU
- between the box and its matched groundtruth box. The matched IoU is the
- maximum IoU of the box and all the groundtruth boxes.
- iou: a tensor of shape of [batch_size, N, K], representing the IoU matrix
- between boxes and the groundtruth boxes. The IoU between a box and the
- invalid groundtruth boxes whose coordinates are [-1, -1, -1, -1] is -1.
- """
- # Compute IoU between boxes and gt_boxes.
- # iou <- [batch_size, N, K]
- iou = bbox_overlap(boxes, gt_boxes)
-
- # max_iou <- [batch_size, N]
- # 0.0 -> no match to gt, or -1.0 match to no gt
- matched_iou = tf.reduce_max(iou, axis=-1)
-
- # background_box_mask <- bool, [batch_size, N]
- background_box_mask = tf.less_equal(matched_iou, 0.0)
-
- argmax_iou_indices = tf.argmax(iou, axis=-1, output_type=tf.int32)
-
- matched_gt_boxes, matched_gt_classes = gather_instances(
- argmax_iou_indices, gt_boxes, gt_classes)
- matched_gt_boxes = tf.where(
- tf.tile(tf.expand_dims(background_box_mask, axis=-1), [1, 1, 4]),
- tf.zeros_like(matched_gt_boxes, dtype=matched_gt_boxes.dtype),
- matched_gt_boxes)
- matched_gt_classes = tf.where(
- background_box_mask,
- tf.zeros_like(matched_gt_classes),
- matched_gt_classes)
-
- matched_gt_indices = tf.where(
- background_box_mask,
- -tf.ones_like(argmax_iou_indices),
- argmax_iou_indices)
-
- return (matched_gt_boxes, matched_gt_classes, matched_gt_indices,
- matched_iou, iou)
diff --git a/official/vision/beta/ops/iou_similarity.py b/official/vision/beta/ops/iou_similarity.py
deleted file mode 100644
index c73a957739da6e20916cc316aa41926e8c3ce06b..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/iou_similarity.py
+++ /dev/null
@@ -1,167 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Region Similarity Calculators."""
-
-import tensorflow as tf
-
-
-def area(box):
- """Computes area of boxes.
-
- B: batch_size
- N: number of boxes
-
- Args:
- box: a float Tensor with [N, 4], or [B, N, 4].
-
- Returns:
- a float Tensor with [N], or [B, N]
- """
- with tf.name_scope('Area'):
- y_min, x_min, y_max, x_max = tf.split(
- value=box, num_or_size_splits=4, axis=-1)
- return tf.squeeze((y_max - y_min) * (x_max - x_min), axis=-1)
-
-
-def intersection(gt_boxes, boxes):
- """Compute pairwise intersection areas between boxes.
-
- B: batch_size
- N: number of groundtruth boxes.
- M: number of anchor boxes.
-
- Args:
- gt_boxes: a float Tensor with [N, 4], or [B, N, 4]
- boxes: a float Tensor with [M, 4], or [B, M, 4]
-
- Returns:
- a float Tensor with shape [N, M] or [B, N, M] representing pairwise
- intersections.
- """
- with tf.name_scope('Intersection'):
- y_min1, x_min1, y_max1, x_max1 = tf.split(
- value=gt_boxes, num_or_size_splits=4, axis=-1)
- y_min2, x_min2, y_max2, x_max2 = tf.split(
- value=boxes, num_or_size_splits=4, axis=-1)
-
- boxes_rank = len(boxes.shape)
- perm = [1, 0] if boxes_rank == 2 else [0, 2, 1]
- # [N, M] or [B, N, M]
- y_min_max = tf.minimum(y_max1, tf.transpose(y_max2, perm))
- y_max_min = tf.maximum(y_min1, tf.transpose(y_min2, perm))
- x_min_max = tf.minimum(x_max1, tf.transpose(x_max2, perm))
- x_max_min = tf.maximum(x_min1, tf.transpose(x_min2, perm))
-
- intersect_heights = y_min_max - y_max_min
- intersect_widths = x_min_max - x_max_min
- zeros_t = tf.cast(0, intersect_heights.dtype)
- intersect_heights = tf.maximum(zeros_t, intersect_heights)
- intersect_widths = tf.maximum(zeros_t, intersect_widths)
- return intersect_heights * intersect_widths
-
-
-def iou(gt_boxes, boxes):
- """Computes pairwise intersection-over-union between box collections.
-
- Args:
- gt_boxes: a float Tensor with [N, 4].
- boxes: a float Tensor with [M, 4].
-
- Returns:
- a Tensor with shape [N, M] representing pairwise iou scores.
- """
- with tf.name_scope('IOU'):
- intersections = intersection(gt_boxes, boxes)
- gt_boxes_areas = area(gt_boxes)
- boxes_areas = area(boxes)
- boxes_rank = len(boxes_areas.shape)
- boxes_axis = 1 if (boxes_rank == 2) else 0
- gt_boxes_areas = tf.expand_dims(gt_boxes_areas, -1)
- boxes_areas = tf.expand_dims(boxes_areas, boxes_axis)
- unions = gt_boxes_areas + boxes_areas
- unions = unions - intersections
- return tf.where(
- tf.equal(intersections, 0.0), tf.zeros_like(intersections),
- tf.truediv(intersections, unions))
-
-
-class IouSimilarity:
- """Class to compute similarity based on Intersection over Union (IOU) metric.
-
- """
-
- def __init__(self, mask_val=-1):
- self.mask_val = mask_val
-
- def __call__(self, boxes_1, boxes_2, boxes_1_masks=None, boxes_2_masks=None):
- """Compute pairwise IOU similarity between ground truth boxes and anchors.
-
- B: batch_size
- N: Number of groundtruth boxes.
- M: Number of anchor boxes.
-
- Args:
- boxes_1: a float Tensor with M or B * M boxes.
- boxes_2: a float Tensor with N or B * N boxes, the rank must be less than
- or equal to rank of `boxes_1`.
- boxes_1_masks: a boolean Tensor with M or B * M boxes. Optional.
- boxes_2_masks: a boolean Tensor with N or B * N boxes. Optional.
-
- Returns:
- A Tensor with shape [M, N] or [B, M, N] representing pairwise
- iou scores, anchor per row and groundtruth_box per colulmn.
-
- Input shape:
- boxes_1: [N, 4], or [B, N, 4]
- boxes_2: [M, 4], or [B, M, 4]
- boxes_1_masks: [N, 1], or [B, N, 1]
- boxes_2_masks: [M, 1], or [B, M, 1]
-
- Output shape:
- [M, N], or [B, M, N]
- """
- boxes_1 = tf.cast(boxes_1, tf.float32)
- boxes_2 = tf.cast(boxes_2, tf.float32)
-
- boxes_1_rank = len(boxes_1.shape)
- boxes_2_rank = len(boxes_2.shape)
- if boxes_1_rank < 2 or boxes_1_rank > 3:
- raise ValueError(
- '`groudtruth_boxes` must be rank 2 or 3, got {}'.format(boxes_1_rank))
- if boxes_2_rank < 2 or boxes_2_rank > 3:
- raise ValueError(
- '`anchors` must be rank 2 or 3, got {}'.format(boxes_2_rank))
- if boxes_1_rank < boxes_2_rank:
- raise ValueError('`groundtruth_boxes` is unbatched while `anchors` is '
- 'batched is not a valid use case, got groundtruth_box '
- 'rank {}, and anchors rank {}'.format(
- boxes_1_rank, boxes_2_rank))
-
- result = iou(boxes_1, boxes_2)
- if boxes_1_masks is None and boxes_2_masks is None:
- return result
- background_mask = None
- mask_val_t = tf.cast(self.mask_val, result.dtype) * tf.ones_like(result)
- perm = [1, 0] if boxes_2_rank == 2 else [0, 2, 1]
- if boxes_1_masks is not None and boxes_2_masks is not None:
- background_mask = tf.logical_or(boxes_1_masks,
- tf.transpose(boxes_2_masks, perm))
- elif boxes_1_masks is not None:
- background_mask = boxes_1_masks
- else:
- background_mask = tf.logical_or(
- tf.zeros(tf.shape(boxes_2)[:-1], dtype=tf.bool),
- tf.transpose(boxes_2_masks, perm))
- return tf.where(background_mask, mask_val_t, result)
diff --git a/official/vision/beta/ops/iou_similarity_test.py b/official/vision/beta/ops/iou_similarity_test.py
deleted file mode 100644
index ea99f5aab42c1844d5b8d710173007475ad758a8..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/iou_similarity_test.py
+++ /dev/null
@@ -1,76 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for iou_similarity.py."""
-
-import tensorflow as tf
-
-from official.vision.beta.ops import iou_similarity
-
-
-class BoxMatcherTest(tf.test.TestCase):
-
- def test_similarity_unbatched(self):
- boxes = tf.constant(
- [
- [0, 0, 1, 1],
- [5, 0, 10, 5],
- ],
- dtype=tf.float32)
-
- gt_boxes = tf.constant(
- [
- [0, 0, 5, 5],
- [0, 5, 5, 10],
- [5, 0, 10, 5],
- [5, 5, 10, 10],
- ],
- dtype=tf.float32)
-
- sim_calc = iou_similarity.IouSimilarity()
- sim_matrix = sim_calc(boxes, gt_boxes)
-
- self.assertAllClose(
- sim_matrix.numpy(),
- [[0.04, 0, 0, 0],
- [0, 0, 1., 0]])
-
- def test_similarity_batched(self):
- boxes = tf.constant(
- [[
- [0, 0, 1, 1],
- [5, 0, 10, 5],
- ]],
- dtype=tf.float32)
-
- gt_boxes = tf.constant(
- [[
- [0, 0, 5, 5],
- [0, 5, 5, 10],
- [5, 0, 10, 5],
- [5, 5, 10, 10],
- ]],
- dtype=tf.float32)
-
- sim_calc = iou_similarity.IouSimilarity()
- sim_matrix = sim_calc(boxes, gt_boxes)
-
- self.assertAllClose(
- sim_matrix.numpy(),
- [[[0.04, 0, 0, 0],
- [0, 0, 1., 0]]])
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/ops/mask_ops.py b/official/vision/beta/ops/mask_ops.py
deleted file mode 100644
index cbdb41caa63da8783ada932158d77ea01ab2c59f..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/mask_ops.py
+++ /dev/null
@@ -1,190 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Utility functions for segmentations."""
-
-import math
-# Import libraries
-import cv2
-import numpy as np
-
-
-def paste_instance_masks(masks,
- detected_boxes,
- image_height,
- image_width):
- """Paste instance masks to generate the image segmentation results.
-
- Args:
- masks: a numpy array of shape [N, mask_height, mask_width] representing the
- instance masks w.r.t. the `detected_boxes`.
- detected_boxes: a numpy array of shape [N, 4] representing the reference
- bounding boxes.
- image_height: an integer representing the height of the image.
- image_width: an integer representing the width of the image.
-
- Returns:
- segms: a numpy array of shape [N, image_height, image_width] representing
- the instance masks *pasted* on the image canvas.
- """
-
- def expand_boxes(boxes, scale):
- """Expands an array of boxes by a given scale."""
- # Reference: https://github.com/facebookresearch/Detectron/blob/master/detectron/utils/boxes.py#L227 # pylint: disable=line-too-long
- # The `boxes` in the reference implementation is in [x1, y1, x2, y2] form,
- # whereas `boxes` here is in [x1, y1, w, h] form
- w_half = boxes[:, 2] * .5
- h_half = boxes[:, 3] * .5
- x_c = boxes[:, 0] + w_half
- y_c = boxes[:, 1] + h_half
-
- w_half *= scale
- h_half *= scale
-
- boxes_exp = np.zeros(boxes.shape)
- boxes_exp[:, 0] = x_c - w_half
- boxes_exp[:, 2] = x_c + w_half
- boxes_exp[:, 1] = y_c - h_half
- boxes_exp[:, 3] = y_c + h_half
-
- return boxes_exp
-
- # Reference: https://github.com/facebookresearch/Detectron/blob/master/detectron/core/test.py#L812 # pylint: disable=line-too-long
- # To work around an issue with cv2.resize (it seems to automatically pad
- # with repeated border values), we manually zero-pad the masks by 1 pixel
- # prior to resizing back to the original image resolution. This prevents
- # "top hat" artifacts. We therefore need to expand the reference boxes by an
- # appropriate factor.
- _, mask_height, mask_width = masks.shape
- scale = max((mask_width + 2.0) / mask_width,
- (mask_height + 2.0) / mask_height)
-
- ref_boxes = expand_boxes(detected_boxes, scale)
- ref_boxes = ref_boxes.astype(np.int32)
- padded_mask = np.zeros((mask_height + 2, mask_width + 2), dtype=np.float32)
- segms = []
- for mask_ind, mask in enumerate(masks):
- im_mask = np.zeros((image_height, image_width), dtype=np.uint8)
- # Process mask inside bounding boxes.
- padded_mask[1:-1, 1:-1] = mask[:, :]
-
- ref_box = ref_boxes[mask_ind, :]
- w = ref_box[2] - ref_box[0] + 1
- h = ref_box[3] - ref_box[1] + 1
- w = np.maximum(w, 1)
- h = np.maximum(h, 1)
-
- mask = cv2.resize(padded_mask, (w, h))
- mask = np.array(mask > 0.5, dtype=np.uint8)
-
- x_0 = min(max(ref_box[0], 0), image_width)
- x_1 = min(max(ref_box[2] + 1, 0), image_width)
- y_0 = min(max(ref_box[1], 0), image_height)
- y_1 = min(max(ref_box[3] + 1, 0), image_height)
-
- im_mask[y_0:y_1, x_0:x_1] = mask[
- (y_0 - ref_box[1]):(y_1 - ref_box[1]),
- (x_0 - ref_box[0]):(x_1 - ref_box[0])
- ]
- segms.append(im_mask)
-
- segms = np.array(segms)
- assert masks.shape[0] == segms.shape[0]
- return segms
-
-
-def paste_instance_masks_v2(masks,
- detected_boxes,
- image_height,
- image_width):
- """Paste instance masks to generate the image segmentation (v2).
-
- Args:
- masks: a numpy array of shape [N, mask_height, mask_width] representing the
- instance masks w.r.t. the `detected_boxes`.
- detected_boxes: a numpy array of shape [N, 4] representing the reference
- bounding boxes.
- image_height: an integer representing the height of the image.
- image_width: an integer representing the width of the image.
-
- Returns:
- segms: a numpy array of shape [N, image_height, image_width] representing
- the instance masks *pasted* on the image canvas.
- """
- _, mask_height, mask_width = masks.shape
-
- segms = []
- for i, mask in enumerate(masks):
- box = detected_boxes[i, :]
- xmin = box[0]
- ymin = box[1]
- xmax = xmin + box[2]
- ymax = ymin + box[3]
-
- # Sample points of the cropped mask w.r.t. the image grid.
- # Note that these coordinates may fall beyond the image.
- # Pixel clipping will happen after warping.
- xmin_int = int(math.floor(xmin))
- xmax_int = int(math.ceil(xmax))
- ymin_int = int(math.floor(ymin))
- ymax_int = int(math.ceil(ymax))
-
- alpha = box[2] / (1.0 * mask_width)
- beta = box[3] / (1.0 * mask_height)
- # pylint: disable=invalid-name
- # Transformation from mask pixel indices to image coordinate.
- M_mask_to_image = np.array(
- [[alpha, 0, xmin],
- [0, beta, ymin],
- [0, 0, 1]],
- dtype=np.float32)
- # Transformation from image to cropped mask coordinate.
- M_image_to_crop = np.array(
- [[1, 0, -xmin_int],
- [0, 1, -ymin_int],
- [0, 0, 1]],
- dtype=np.float32)
- M = np.dot(M_image_to_crop, M_mask_to_image)
- # Compensate the half pixel offset that OpenCV has in the
- # warpPerspective implementation: the top-left pixel is sampled
- # at (0,0), but we want it to be at (0.5, 0.5).
- M = np.dot(
- np.dot(
- np.array([[1, 0, -0.5],
- [0, 1, -0.5],
- [0, 0, 1]], np.float32),
- M),
- np.array([[1, 0, 0.5],
- [0, 1, 0.5],
- [0, 0, 1]], np.float32))
- # pylint: enable=invalid-name
- cropped_mask = cv2.warpPerspective(
- mask.astype(np.float32), M,
- (xmax_int - xmin_int, ymax_int - ymin_int))
- cropped_mask = np.array(cropped_mask > 0.5, dtype=np.uint8)
-
- img_mask = np.zeros((image_height, image_width))
- x0 = max(min(xmin_int, image_width), 0)
- x1 = max(min(xmax_int, image_width), 0)
- y0 = max(min(ymin_int, image_height), 0)
- y1 = max(min(ymax_int, image_height), 0)
- img_mask[y0:y1, x0:x1] = cropped_mask[
- (y0 - ymin_int):(y1 - ymin_int),
- (x0 - xmin_int):(x1 - xmin_int)]
-
- segms.append(img_mask)
-
- segms = np.array(segms)
- return segms
-
diff --git a/official/vision/beta/ops/mask_ops_test.py b/official/vision/beta/ops/mask_ops_test.py
deleted file mode 100644
index f63892bc861bc35f7d969f8d42baf5ac7d615463..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/mask_ops_test.py
+++ /dev/null
@@ -1,55 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-
-"""Tests for mask_ops.py."""
-
-# Import libraries
-import numpy as np
-import tensorflow as tf
-from official.vision.beta.ops import mask_ops
-
-
-class MaskUtilsTest(tf.test.TestCase):
-
- def testPasteInstanceMasks(self):
- image_height = 10
- image_width = 10
- mask_height = 6
- mask_width = 6
- masks = np.random.randint(0, 255, (1, mask_height, mask_width))
- detected_boxes = np.array([[0.0, 2.0, mask_width, mask_height]])
-
- _ = mask_ops.paste_instance_masks(
- masks, detected_boxes, image_height, image_width)
-
- def testPasteInstanceMasksV2(self):
- image_height = 10
- image_width = 10
- mask_height = 6
- mask_width = 6
- masks = np.random.randint(0, 255, (1, mask_height, mask_width))
- detected_boxes = np.array([[0.0, 2.0, mask_width, mask_height]])
-
- image_masks = mask_ops.paste_instance_masks_v2(
- masks, detected_boxes, image_height, image_width)
-
- self.assertNDArrayNear(
- image_masks[:, 2:8, 0:6],
- np.array(masks > 0.5, dtype=np.uint8),
- 1e-5)
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/ops/nms.py b/official/vision/beta/ops/nms.py
deleted file mode 100644
index 7d1ab3c515e804312428bd450efba805c89a7c02..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/nms.py
+++ /dev/null
@@ -1,202 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tensorflow implementation of non max suppression."""
-
-# Import libraries
-import tensorflow as tf
-
-from official.vision.beta.ops import box_ops
-
-
-NMS_TILE_SIZE = 512
-
-
-def _self_suppression(iou, _, iou_sum):
- batch_size = tf.shape(iou)[0]
- can_suppress_others = tf.cast(
- tf.reshape(tf.reduce_max(iou, 1) <= 0.5, [batch_size, -1, 1]), iou.dtype)
- iou_suppressed = tf.reshape(
- tf.cast(tf.reduce_max(can_suppress_others * iou, 1) <= 0.5, iou.dtype),
- [batch_size, -1, 1]) * iou
- iou_sum_new = tf.reduce_sum(iou_suppressed, [1, 2])
- return [
- iou_suppressed,
- tf.reduce_any(iou_sum - iou_sum_new > 0.5), iou_sum_new
- ]
-
-
-def _cross_suppression(boxes, box_slice, iou_threshold, inner_idx):
- batch_size = tf.shape(boxes)[0]
- new_slice = tf.slice(boxes, [0, inner_idx * NMS_TILE_SIZE, 0],
- [batch_size, NMS_TILE_SIZE, 4])
- iou = box_ops.bbox_overlap(new_slice, box_slice)
- ret_slice = tf.expand_dims(
- tf.cast(tf.reduce_all(iou < iou_threshold, [1]), box_slice.dtype),
- 2) * box_slice
- return boxes, ret_slice, iou_threshold, inner_idx + 1
-
-
-def _suppression_loop_body(boxes, iou_threshold, output_size, idx):
- """Process boxes in the range [idx*NMS_TILE_SIZE, (idx+1)*NMS_TILE_SIZE).
-
- Args:
- boxes: a tensor with a shape of [batch_size, anchors, 4].
- iou_threshold: a float representing the threshold for deciding whether boxes
- overlap too much with respect to IOU.
- output_size: an int32 tensor of size [batch_size]. Representing the number
- of selected boxes for each batch.
- idx: an integer scalar representing induction variable.
-
- Returns:
- boxes: updated boxes.
- iou_threshold: pass down iou_threshold to the next iteration.
- output_size: the updated output_size.
- idx: the updated induction variable.
- """
- num_tiles = tf.shape(boxes)[1] // NMS_TILE_SIZE
- batch_size = tf.shape(boxes)[0]
-
- # Iterates over tiles that can possibly suppress the current tile.
- box_slice = tf.slice(boxes, [0, idx * NMS_TILE_SIZE, 0],
- [batch_size, NMS_TILE_SIZE, 4])
- _, box_slice, _, _ = tf.while_loop(
- lambda _boxes, _box_slice, _threshold, inner_idx: inner_idx < idx,
- _cross_suppression, [boxes, box_slice, iou_threshold,
- tf.constant(0)])
-
- # Iterates over the current tile to compute self-suppression.
- iou = box_ops.bbox_overlap(box_slice, box_slice)
- mask = tf.expand_dims(
- tf.reshape(tf.range(NMS_TILE_SIZE), [1, -1]) > tf.reshape(
- tf.range(NMS_TILE_SIZE), [-1, 1]), 0)
- iou *= tf.cast(tf.logical_and(mask, iou >= iou_threshold), iou.dtype)
- suppressed_iou, _, _ = tf.while_loop(
- lambda _iou, loop_condition, _iou_sum: loop_condition, _self_suppression,
- [iou, tf.constant(True),
- tf.reduce_sum(iou, [1, 2])])
- suppressed_box = tf.reduce_sum(suppressed_iou, 1) > 0
- box_slice *= tf.expand_dims(1.0 - tf.cast(suppressed_box, box_slice.dtype), 2)
-
- # Uses box_slice to update the input boxes.
- mask = tf.reshape(
- tf.cast(tf.equal(tf.range(num_tiles), idx), boxes.dtype), [1, -1, 1, 1])
- boxes = tf.tile(tf.expand_dims(
- box_slice, [1]), [1, num_tiles, 1, 1]) * mask + tf.reshape(
- boxes, [batch_size, num_tiles, NMS_TILE_SIZE, 4]) * (1 - mask)
- boxes = tf.reshape(boxes, [batch_size, -1, 4])
-
- # Updates output_size.
- output_size += tf.reduce_sum(
- tf.cast(tf.reduce_any(box_slice > 0, [2]), tf.int32), [1])
- return boxes, iou_threshold, output_size, idx + 1
-
-
-def sorted_non_max_suppression_padded(scores,
- boxes,
- max_output_size,
- iou_threshold):
- """A wrapper that handles non-maximum suppression.
-
- Assumption:
- * The boxes are sorted by scores unless the box is a dot (all coordinates
- are zero).
- * Boxes with higher scores can be used to suppress boxes with lower scores.
-
- The overal design of the algorithm is to handle boxes tile-by-tile:
-
- boxes = boxes.pad_to_multiply_of(tile_size)
- num_tiles = len(boxes) // tile_size
- output_boxes = []
- for i in range(num_tiles):
- box_tile = boxes[i*tile_size : (i+1)*tile_size]
- for j in range(i - 1):
- suppressing_tile = boxes[j*tile_size : (j+1)*tile_size]
- iou = bbox_overlap(box_tile, suppressing_tile)
- # if the box is suppressed in iou, clear it to a dot
- box_tile *= _update_boxes(iou)
- # Iteratively handle the diagnal tile.
- iou = _box_overlap(box_tile, box_tile)
- iou_changed = True
- while iou_changed:
- # boxes that are not suppressed by anything else
- suppressing_boxes = _get_suppressing_boxes(iou)
- # boxes that are suppressed by suppressing_boxes
- suppressed_boxes = _get_suppressed_boxes(iou, suppressing_boxes)
- # clear iou to 0 for boxes that are suppressed, as they cannot be used
- # to suppress other boxes any more
- new_iou = _clear_iou(iou, suppressed_boxes)
- iou_changed = (new_iou != iou)
- iou = new_iou
- # remaining boxes that can still suppress others, are selected boxes.
- output_boxes.append(_get_suppressing_boxes(iou))
- if len(output_boxes) >= max_output_size:
- break
-
- Args:
- scores: a tensor with a shape of [batch_size, anchors].
- boxes: a tensor with a shape of [batch_size, anchors, 4].
- max_output_size: a scalar integer `Tensor` representing the maximum number
- of boxes to be selected by non max suppression.
- iou_threshold: a float representing the threshold for deciding whether boxes
- overlap too much with respect to IOU.
-
- Returns:
- nms_scores: a tensor with a shape of [batch_size, anchors]. It has same
- dtype as input scores.
- nms_proposals: a tensor with a shape of [batch_size, anchors, 4]. It has
- same dtype as input boxes.
- """
- batch_size = tf.shape(boxes)[0]
- num_boxes = tf.shape(boxes)[1]
- pad = tf.cast(
- tf.math.ceil(tf.cast(num_boxes, tf.float32) / NMS_TILE_SIZE),
- tf.int32) * NMS_TILE_SIZE - num_boxes
- boxes = tf.pad(tf.cast(boxes, tf.float32), [[0, 0], [0, pad], [0, 0]])
- scores = tf.pad(
- tf.cast(scores, tf.float32), [[0, 0], [0, pad]], constant_values=-1)
- num_boxes += pad
-
- def _loop_cond(unused_boxes, unused_threshold, output_size, idx):
- return tf.logical_and(
- tf.reduce_min(output_size) < max_output_size,
- idx < num_boxes // NMS_TILE_SIZE)
-
- selected_boxes, _, output_size, _ = tf.while_loop(
- _loop_cond, _suppression_loop_body, [
- boxes, iou_threshold,
- tf.zeros([batch_size], tf.int32),
- tf.constant(0)
- ])
- idx = num_boxes - tf.cast(
- tf.nn.top_k(
- tf.cast(tf.reduce_any(selected_boxes > 0, [2]), tf.int32) *
- tf.expand_dims(tf.range(num_boxes, 0, -1), 0), max_output_size)[0],
- tf.int32)
- idx = tf.minimum(idx, num_boxes - 1)
- idx = tf.reshape(
- idx + tf.reshape(tf.range(batch_size) * num_boxes, [-1, 1]), [-1])
- boxes = tf.reshape(
- tf.gather(tf.reshape(boxes, [-1, 4]), idx),
- [batch_size, max_output_size, 4])
- boxes = boxes * tf.cast(
- tf.reshape(tf.range(max_output_size), [1, -1, 1]) < tf.reshape(
- output_size, [-1, 1, 1]), boxes.dtype)
- scores = tf.reshape(
- tf.gather(tf.reshape(scores, [-1, 1]), idx),
- [batch_size, max_output_size])
- scores = scores * tf.cast(
- tf.reshape(tf.range(max_output_size), [1, -1]) < tf.reshape(
- output_size, [-1, 1]), scores.dtype)
- return scores, boxes
diff --git a/official/vision/beta/ops/preprocess_ops.py b/official/vision/beta/ops/preprocess_ops.py
deleted file mode 100644
index d8c40fc1f670df922c52f2a706f58bf1a53dc5d8..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/preprocess_ops.py
+++ /dev/null
@@ -1,919 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Preprocessing ops."""
-
-import math
-from typing import Optional, Tuple, Union
-from six.moves import range
-import tensorflow as tf
-
-from official.vision.beta.ops import augment
-from official.vision.beta.ops import box_ops
-
-CENTER_CROP_FRACTION = 0.875
-
-
-def clip_or_pad_to_fixed_size(input_tensor, size, constant_values=0):
- """Pads data to a fixed length at the first dimension.
-
- Args:
- input_tensor: `Tensor` with any dimension.
- size: `int` number for the first dimension of output Tensor.
- constant_values: `int` value assigned to the paddings.
-
- Returns:
- `Tensor` with the first dimension padded to `size`.
- """
- input_shape = input_tensor.get_shape().as_list()
- padding_shape = []
-
- # Computes the padding length on the first dimension, clip input tensor if it
- # is longer than `size`.
- input_length = tf.shape(input_tensor)[0]
- input_length = tf.clip_by_value(input_length, 0, size)
- input_tensor = input_tensor[:input_length]
-
- padding_length = tf.maximum(0, size - input_length)
- padding_shape.append(padding_length)
-
- # Copies shapes of the rest of input shape dimensions.
- for i in range(1, len(input_shape)):
- padding_shape.append(tf.shape(input_tensor)[i])
-
- # Pads input tensor to the fixed first dimension.
- paddings = tf.cast(constant_values * tf.ones(padding_shape),
- input_tensor.dtype)
- padded_tensor = tf.concat([input_tensor, paddings], axis=0)
- output_shape = input_shape
- output_shape[0] = size
- padded_tensor.set_shape(output_shape)
- return padded_tensor
-
-
-def normalize_image(image,
- offset=(0.485, 0.456, 0.406),
- scale=(0.229, 0.224, 0.225)):
- """Normalizes the image to zero mean and unit variance."""
- with tf.name_scope('normalize_image'):
- image = tf.image.convert_image_dtype(image, dtype=tf.float32)
- offset = tf.constant(offset)
- offset = tf.expand_dims(offset, axis=0)
- offset = tf.expand_dims(offset, axis=0)
- image -= offset
-
- scale = tf.constant(scale)
- scale = tf.expand_dims(scale, axis=0)
- scale = tf.expand_dims(scale, axis=0)
- image /= scale
- return image
-
-
-def compute_padded_size(desired_size, stride):
- """Compute the padded size given the desired size and the stride.
-
- The padded size will be the smallest rectangle, such that each dimension is
- the smallest multiple of the stride which is larger than the desired
- dimension. For example, if desired_size = (100, 200) and stride = 32,
- the output padded_size = (128, 224).
-
- Args:
- desired_size: a `Tensor` or `int` list/tuple of two elements representing
- [height, width] of the target output image size.
- stride: an integer, the stride of the backbone network.
-
- Returns:
- padded_size: a `Tensor` or `int` list/tuple of two elements representing
- [height, width] of the padded output image size.
- """
- if isinstance(desired_size, list) or isinstance(desired_size, tuple):
- padded_size = [int(math.ceil(d * 1.0 / stride) * stride)
- for d in desired_size]
- else:
- padded_size = tf.cast(
- tf.math.ceil(
- tf.cast(desired_size, dtype=tf.float32) / stride) * stride,
- tf.int32)
- return padded_size
-
-
-def resize_and_crop_image(image,
- desired_size,
- padded_size,
- aug_scale_min=1.0,
- aug_scale_max=1.0,
- seed=1,
- method=tf.image.ResizeMethod.BILINEAR):
- """Resizes the input image to output size (RetinaNet style).
-
- Resize and pad images given the desired output size of the image and
- stride size.
-
- Here are the preprocessing steps.
- 1. For a given image, keep its aspect ratio and rescale the image to make it
- the largest rectangle to be bounded by the rectangle specified by the
- `desired_size`.
- 2. Pad the rescaled image to the padded_size.
-
- Args:
- image: a `Tensor` of shape [height, width, 3] representing an image.
- desired_size: a `Tensor` or `int` list/tuple of two elements representing
- [height, width] of the desired actual output image size.
- padded_size: a `Tensor` or `int` list/tuple of two elements representing
- [height, width] of the padded output image size. Padding will be applied
- after scaling the image to the desired_size.
- aug_scale_min: a `float` with range between [0, 1.0] representing minimum
- random scale applied to desired_size for training scale jittering.
- aug_scale_max: a `float` with range between [1.0, inf] representing maximum
- random scale applied to desired_size for training scale jittering.
- seed: seed for random scale jittering.
- method: function to resize input image to scaled image.
-
- Returns:
- output_image: `Tensor` of shape [height, width, 3] where [height, width]
- equals to `output_size`.
- image_info: a 2D `Tensor` that encodes the information of the image and the
- applied preprocessing. It is in the format of
- [[original_height, original_width], [desired_height, desired_width],
- [y_scale, x_scale], [y_offset, x_offset]], where [desired_height,
- desired_width] is the actual scaled image size, and [y_scale, x_scale] is
- the scaling factor, which is the ratio of
- scaled dimension / original dimension.
- """
- with tf.name_scope('resize_and_crop_image'):
- image_size = tf.cast(tf.shape(image)[0:2], tf.float32)
-
- random_jittering = (aug_scale_min != 1.0 or aug_scale_max != 1.0)
-
- if random_jittering:
- random_scale = tf.random.uniform(
- [], aug_scale_min, aug_scale_max, seed=seed)
- scaled_size = tf.round(random_scale * desired_size)
- else:
- scaled_size = desired_size
-
- scale = tf.minimum(
- scaled_size[0] / image_size[0], scaled_size[1] / image_size[1])
- scaled_size = tf.round(image_size * scale)
-
- # Computes 2D image_scale.
- image_scale = scaled_size / image_size
-
- # Selects non-zero random offset (x, y) if scaled image is larger than
- # desired_size.
- if random_jittering:
- max_offset = scaled_size - desired_size
- max_offset = tf.where(
- tf.less(max_offset, 0), tf.zeros_like(max_offset), max_offset)
- offset = max_offset * tf.random.uniform([2,], 0, 1, seed=seed)
- offset = tf.cast(offset, tf.int32)
- else:
- offset = tf.zeros((2,), tf.int32)
-
- scaled_image = tf.image.resize(
- image, tf.cast(scaled_size, tf.int32), method=method)
-
- if random_jittering:
- scaled_image = scaled_image[
- offset[0]:offset[0] + desired_size[0],
- offset[1]:offset[1] + desired_size[1], :]
-
- output_image = tf.image.pad_to_bounding_box(
- scaled_image, 0, 0, padded_size[0], padded_size[1])
-
- image_info = tf.stack([
- image_size,
- tf.constant(desired_size, dtype=tf.float32),
- image_scale,
- tf.cast(offset, tf.float32)])
- return output_image, image_info
-
-
-def resize_and_crop_image_v2(image,
- short_side,
- long_side,
- padded_size,
- aug_scale_min=1.0,
- aug_scale_max=1.0,
- seed=1,
- method=tf.image.ResizeMethod.BILINEAR):
- """Resizes the input image to output size (Faster R-CNN style).
-
- Resize and pad images given the specified short / long side length and the
- stride size.
-
- Here are the preprocessing steps.
- 1. For a given image, keep its aspect ratio and first try to rescale the short
- side of the original image to `short_side`.
- 2. If the scaled image after 1 has a long side that exceeds `long_side`, keep
- the aspect ratio and rescal the long side of the image to `long_side`.
- 2. Pad the rescaled image to the padded_size.
-
- Args:
- image: a `Tensor` of shape [height, width, 3] representing an image.
- short_side: a scalar `Tensor` or `int` representing the desired short side
- to be rescaled to.
- long_side: a scalar `Tensor` or `int` representing the desired long side to
- be rescaled to.
- padded_size: a `Tensor` or `int` list/tuple of two elements representing
- [height, width] of the padded output image size. Padding will be applied
- after scaling the image to the desired_size.
- aug_scale_min: a `float` with range between [0, 1.0] representing minimum
- random scale applied to desired_size for training scale jittering.
- aug_scale_max: a `float` with range between [1.0, inf] representing maximum
- random scale applied to desired_size for training scale jittering.
- seed: seed for random scale jittering.
- method: function to resize input image to scaled image.
-
- Returns:
- output_image: `Tensor` of shape [height, width, 3] where [height, width]
- equals to `output_size`.
- image_info: a 2D `Tensor` that encodes the information of the image and the
- applied preprocessing. It is in the format of
- [[original_height, original_width], [desired_height, desired_width],
- [y_scale, x_scale], [y_offset, x_offset]], where [desired_height,
- desired_width] is the actual scaled image size, and [y_scale, x_scale] is
- the scaling factor, which is the ratio of
- scaled dimension / original dimension.
- """
- with tf.name_scope('resize_and_crop_image_v2'):
- image_size = tf.cast(tf.shape(image)[0:2], tf.float32)
-
- scale_using_short_side = (
- short_side / tf.math.minimum(image_size[0], image_size[1]))
- scale_using_long_side = (
- long_side / tf.math.maximum(image_size[0], image_size[1]))
-
- scaled_size = tf.math.round(image_size * scale_using_short_side)
- scaled_size = tf.where(
- tf.math.greater(
- tf.math.maximum(scaled_size[0], scaled_size[1]), long_side),
- tf.math.round(image_size * scale_using_long_side),
- scaled_size)
- desired_size = scaled_size
-
- random_jittering = (aug_scale_min != 1.0 or aug_scale_max != 1.0)
-
- if random_jittering:
- random_scale = tf.random.uniform(
- [], aug_scale_min, aug_scale_max, seed=seed)
- scaled_size = tf.math.round(random_scale * scaled_size)
-
- # Computes 2D image_scale.
- image_scale = scaled_size / image_size
-
- # Selects non-zero random offset (x, y) if scaled image is larger than
- # desired_size.
- if random_jittering:
- max_offset = scaled_size - desired_size
- max_offset = tf.where(
- tf.math.less(max_offset, 0), tf.zeros_like(max_offset), max_offset)
- offset = max_offset * tf.random.uniform([2,], 0, 1, seed=seed)
- offset = tf.cast(offset, tf.int32)
- else:
- offset = tf.zeros((2,), tf.int32)
-
- scaled_image = tf.image.resize(
- image, tf.cast(scaled_size, tf.int32), method=method)
-
- if random_jittering:
- scaled_image = scaled_image[
- offset[0]:offset[0] + desired_size[0],
- offset[1]:offset[1] + desired_size[1], :]
-
- output_image = tf.image.pad_to_bounding_box(
- scaled_image, 0, 0, padded_size[0], padded_size[1])
-
- image_info = tf.stack([
- image_size,
- tf.cast(desired_size, dtype=tf.float32),
- image_scale,
- tf.cast(offset, tf.float32)])
- return output_image, image_info
-
-
-def resize_image(
- image: tf.Tensor,
- size: Union[Tuple[int, int], int],
- max_size: Optional[int] = None,
- method: tf.image.ResizeMethod = tf.image.ResizeMethod.BILINEAR):
- """Resize image with size and max_size.
-
- Args:
- image: the image to be resized.
- size: if list to tuple, resize to it. If scalar, we keep the same
- aspect ratio and resize the short side to the value.
- max_size: only used when size is a scalar. When the larger side is larger
- than max_size after resized with size we used max_size to keep the aspect
- ratio instead.
- method: the method argument passed to tf.image.resize.
-
- Returns:
- the resized image and image_info to be used for downstream processing.
- image_info: a 2D `Tensor` that encodes the information of the image and the
- applied preprocessing. It is in the format of
- [[original_height, original_width], [resized_height, resized_width],
- [y_scale, x_scale], [0, 0]], where [resized_height, resized_width]
- is the actual scaled image size, and [y_scale, x_scale] is the
- scaling factor, which is the ratio of
- scaled dimension / original dimension.
- """
-
- def get_size_with_aspect_ratio(image_size, size, max_size=None):
- h = image_size[0]
- w = image_size[1]
- if max_size is not None:
- min_original_size = tf.cast(tf.math.minimum(w, h), dtype=tf.float32)
- max_original_size = tf.cast(tf.math.maximum(w, h), dtype=tf.float32)
- if max_original_size / min_original_size * size > max_size:
- size = tf.cast(
- tf.math.floor(max_size * min_original_size / max_original_size),
- dtype=tf.int32)
- else:
- size = tf.cast(size, tf.int32)
-
- else:
- size = tf.cast(size, tf.int32)
- if (w <= h and w == size) or (h <= w and h == size):
- return tf.stack([h, w])
-
- if w < h:
- ow = size
- oh = tf.cast(
- (tf.cast(size, dtype=tf.float32) * tf.cast(h, dtype=tf.float32) /
- tf.cast(w, dtype=tf.float32)),
- dtype=tf.int32)
- else:
- oh = size
- ow = tf.cast(
- (tf.cast(size, dtype=tf.float32) * tf.cast(w, dtype=tf.float32) /
- tf.cast(h, dtype=tf.float32)),
- dtype=tf.int32)
-
- return tf.stack([oh, ow])
-
- def get_size(image_size, size, max_size=None):
- if isinstance(size, (list, tuple)):
- return size[::-1]
- else:
- return get_size_with_aspect_ratio(image_size, size, max_size)
-
- orignal_size = tf.shape(image)[0:2]
- size = get_size(orignal_size, size, max_size)
- rescaled_image = tf.image.resize(
- image, tf.cast(size, tf.int32), method=method)
- image_scale = size / orignal_size
- image_info = tf.stack([
- tf.cast(orignal_size, dtype=tf.float32),
- tf.cast(size, dtype=tf.float32),
- tf.cast(image_scale, tf.float32),
- tf.constant([0.0, 0.0], dtype=tf.float32)
- ])
- return rescaled_image, image_info
-
-
-def center_crop_image(image):
- """Center crop a square shape slice from the input image.
-
- It crops a square shape slice from the image. The side of the actual crop
- is 224 / 256 = 0.875 of the short side of the original image. References:
- [1] Very Deep Convolutional Networks for Large-Scale Image Recognition
- https://arxiv.org/abs/1409.1556
- [2] Deep Residual Learning for Image Recognition
- https://arxiv.org/abs/1512.03385
-
- Args:
- image: a Tensor of shape [height, width, 3] representing the input image.
-
- Returns:
- cropped_image: a Tensor representing the center cropped image.
- """
- with tf.name_scope('center_crop_image'):
- image_size = tf.cast(tf.shape(image)[:2], dtype=tf.float32)
- crop_size = (
- CENTER_CROP_FRACTION * tf.math.minimum(image_size[0], image_size[1]))
- crop_offset = tf.cast((image_size - crop_size) / 2.0, dtype=tf.int32)
- crop_size = tf.cast(crop_size, dtype=tf.int32)
- cropped_image = image[
- crop_offset[0]:crop_offset[0] + crop_size,
- crop_offset[1]:crop_offset[1] + crop_size, :]
- return cropped_image
-
-
-def center_crop_image_v2(image_bytes, image_shape):
- """Center crop a square shape slice from the input image.
-
- It crops a square shape slice from the image. The side of the actual crop
- is 224 / 256 = 0.875 of the short side of the original image. References:
- [1] Very Deep Convolutional Networks for Large-Scale Image Recognition
- https://arxiv.org/abs/1409.1556
- [2] Deep Residual Learning for Image Recognition
- https://arxiv.org/abs/1512.03385
-
- This is a faster version of `center_crop_image` which takes the original
- image bytes and image size as the inputs, and partially decode the JPEG
- bytes according to the center crop.
-
- Args:
- image_bytes: a Tensor of type string representing the raw image bytes.
- image_shape: a Tensor specifying the shape of the raw image.
-
- Returns:
- cropped_image: a Tensor representing the center cropped image.
- """
- with tf.name_scope('center_image_crop_v2'):
- image_shape = tf.cast(image_shape, tf.float32)
- crop_size = (
- CENTER_CROP_FRACTION * tf.math.minimum(image_shape[0], image_shape[1]))
- crop_offset = tf.cast((image_shape - crop_size) / 2.0, dtype=tf.int32)
- crop_size = tf.cast(crop_size, dtype=tf.int32)
- crop_window = tf.stack(
- [crop_offset[0], crop_offset[1], crop_size, crop_size])
- cropped_image = tf.image.decode_and_crop_jpeg(
- image_bytes, crop_window, channels=3)
- return cropped_image
-
-
-def random_crop_image(image,
- aspect_ratio_range=(3. / 4., 4. / 3.),
- area_range=(0.08, 1.0),
- max_attempts=10,
- seed=1):
- """Randomly crop an arbitrary shaped slice from the input image.
-
- Args:
- image: a Tensor of shape [height, width, 3] representing the input image.
- aspect_ratio_range: a list of floats. The cropped area of the image must
- have an aspect ratio = width / height within this range.
- area_range: a list of floats. The cropped reas of the image must contain
- a fraction of the input image within this range.
- max_attempts: the number of attempts at generating a cropped region of the
- image of the specified constraints. After max_attempts failures, return
- the entire image.
- seed: the seed of the random generator.
-
- Returns:
- cropped_image: a Tensor representing the random cropped image. Can be the
- original image if max_attempts is exhausted.
- """
- with tf.name_scope('random_crop_image'):
- crop_offset, crop_size, _ = tf.image.sample_distorted_bounding_box(
- tf.shape(image),
- tf.constant([0.0, 0.0, 1.0, 1.0], dtype=tf.float32, shape=[1, 1, 4]),
- seed=seed,
- min_object_covered=area_range[0],
- aspect_ratio_range=aspect_ratio_range,
- area_range=area_range,
- max_attempts=max_attempts)
- cropped_image = tf.slice(image, crop_offset, crop_size)
- return cropped_image
-
-
-def random_crop_image_v2(image_bytes,
- image_shape,
- aspect_ratio_range=(3. / 4., 4. / 3.),
- area_range=(0.08, 1.0),
- max_attempts=10,
- seed=1):
- """Randomly crop an arbitrary shaped slice from the input image.
-
- This is a faster version of `random_crop_image` which takes the original
- image bytes and image size as the inputs, and partially decode the JPEG
- bytes according to the generated crop.
-
- Args:
- image_bytes: a Tensor of type string representing the raw image bytes.
- image_shape: a Tensor specifying the shape of the raw image.
- aspect_ratio_range: a list of floats. The cropped area of the image must
- have an aspect ratio = width / height within this range.
- area_range: a list of floats. The cropped reas of the image must contain
- a fraction of the input image within this range.
- max_attempts: the number of attempts at generating a cropped region of the
- image of the specified constraints. After max_attempts failures, return
- the entire image.
- seed: the seed of the random generator.
-
- Returns:
- cropped_image: a Tensor representing the random cropped image. Can be the
- original image if max_attempts is exhausted.
- """
- with tf.name_scope('random_crop_image_v2'):
- crop_offset, crop_size, _ = tf.image.sample_distorted_bounding_box(
- image_shape,
- tf.constant([0.0, 0.0, 1.0, 1.0], dtype=tf.float32, shape=[1, 1, 4]),
- seed=seed,
- min_object_covered=area_range[0],
- aspect_ratio_range=aspect_ratio_range,
- area_range=area_range,
- max_attempts=max_attempts)
- offset_y, offset_x, _ = tf.unstack(crop_offset)
- crop_height, crop_width, _ = tf.unstack(crop_size)
- crop_window = tf.stack([offset_y, offset_x, crop_height, crop_width])
- cropped_image = tf.image.decode_and_crop_jpeg(
- image_bytes, crop_window, channels=3)
- return cropped_image
-
-
-def resize_and_crop_boxes(boxes,
- image_scale,
- output_size,
- offset):
- """Resizes boxes to output size with scale and offset.
-
- Args:
- boxes: `Tensor` of shape [N, 4] representing ground truth boxes.
- image_scale: 2D float `Tensor` representing scale factors that apply to
- [height, width] of input image.
- output_size: 2D `Tensor` or `int` representing [height, width] of target
- output image size.
- offset: 2D `Tensor` representing top-left corner [y0, x0] to crop scaled
- boxes.
-
- Returns:
- boxes: `Tensor` of shape [N, 4] representing the scaled boxes.
- """
- with tf.name_scope('resize_and_crop_boxes'):
- # Adjusts box coordinates based on image_scale and offset.
- boxes *= tf.tile(tf.expand_dims(image_scale, axis=0), [1, 2])
- boxes -= tf.tile(tf.expand_dims(offset, axis=0), [1, 2])
- # Clips the boxes.
- boxes = box_ops.clip_boxes(boxes, output_size)
- return boxes
-
-
-def resize_and_crop_masks(masks,
- image_scale,
- output_size,
- offset):
- """Resizes boxes to output size with scale and offset.
-
- Args:
- masks: `Tensor` of shape [N, H, W, 1] representing ground truth masks.
- image_scale: 2D float `Tensor` representing scale factors that apply to
- [height, width] of input image.
- output_size: 2D `Tensor` or `int` representing [height, width] of target
- output image size.
- offset: 2D `Tensor` representing top-left corner [y0, x0] to crop scaled
- boxes.
-
- Returns:
- masks: `Tensor` of shape [N, H, W, 1] representing the scaled masks.
- """
- with tf.name_scope('resize_and_crop_masks'):
- mask_size = tf.cast(tf.shape(masks)[1:3], tf.float32)
- # Pad masks to avoid empty mask annotations.
- masks = tf.concat(
- [tf.zeros([1, mask_size[0], mask_size[1], 1]), masks], axis=0)
-
- scaled_size = tf.cast(image_scale * mask_size, tf.int32)
- scaled_masks = tf.image.resize(
- masks, scaled_size, method=tf.image.ResizeMethod.NEAREST_NEIGHBOR)
- offset = tf.cast(offset, tf.int32)
- scaled_masks = scaled_masks[
- :,
- offset[0]:offset[0] + output_size[0],
- offset[1]:offset[1] + output_size[1],
- :]
-
- output_masks = tf.image.pad_to_bounding_box(
- scaled_masks, 0, 0, output_size[0], output_size[1])
- # Remove padding.
- output_masks = output_masks[1::]
- return output_masks
-
-
-def horizontal_flip_image(image):
- """Flips image horizontally."""
- return tf.image.flip_left_right(image)
-
-
-def horizontal_flip_boxes(normalized_boxes):
- """Flips normalized boxes horizontally."""
- ymin, xmin, ymax, xmax = tf.split(
- value=normalized_boxes, num_or_size_splits=4, axis=1)
- flipped_xmin = tf.subtract(1.0, xmax)
- flipped_xmax = tf.subtract(1.0, xmin)
- flipped_boxes = tf.concat([ymin, flipped_xmin, ymax, flipped_xmax], 1)
- return flipped_boxes
-
-
-def horizontal_flip_masks(masks):
- """Flips masks horizontally."""
- return masks[:, :, ::-1]
-
-
-def random_horizontal_flip(image, normalized_boxes=None, masks=None, seed=1):
- """Randomly flips input image and bounding boxes."""
- with tf.name_scope('random_horizontal_flip'):
- do_flip = tf.greater(tf.random.uniform([], seed=seed), 0.5)
-
- image = tf.cond(
- do_flip,
- lambda: horizontal_flip_image(image),
- lambda: image)
-
- if normalized_boxes is not None:
- normalized_boxes = tf.cond(
- do_flip,
- lambda: horizontal_flip_boxes(normalized_boxes),
- lambda: normalized_boxes)
-
- if masks is not None:
- masks = tf.cond(
- do_flip,
- lambda: horizontal_flip_masks(masks),
- lambda: masks)
-
- return image, normalized_boxes, masks
-
-
-def color_jitter(image: tf.Tensor,
- brightness: Optional[float] = 0.,
- contrast: Optional[float] = 0.,
- saturation: Optional[float] = 0.,
- seed: Optional[int] = None) -> tf.Tensor:
- """Applies color jitter to an image, similarly to torchvision`s ColorJitter.
-
- Args:
- image (tf.Tensor): Of shape [height, width, 3] and type uint8.
- brightness (float, optional): Magnitude for brightness jitter. Defaults to
- 0.
- contrast (float, optional): Magnitude for contrast jitter. Defaults to 0.
- saturation (float, optional): Magnitude for saturation jitter. Defaults to
- 0.
- seed (int, optional): Random seed. Defaults to None.
-
- Returns:
- tf.Tensor: The augmented `image` of type uint8.
- """
- image = tf.cast(image, dtype=tf.uint8)
- image = random_brightness(image, brightness, seed=seed)
- image = random_contrast(image, contrast, seed=seed)
- image = random_saturation(image, saturation, seed=seed)
- return image
-
-
-def random_brightness(image: tf.Tensor,
- brightness: float = 0.,
- seed: Optional[int] = None) -> tf.Tensor:
- """Jitters brightness of an image.
-
- Args:
- image (tf.Tensor): Of shape [height, width, 3] and type uint8.
- brightness (float, optional): Magnitude for brightness jitter. Defaults to
- 0.
- seed (int, optional): Random seed. Defaults to None.
-
- Returns:
- tf.Tensor: The augmented `image` of type uint8.
- """
- assert brightness >= 0, '`brightness` must be positive'
- brightness = tf.random.uniform([],
- max(0, 1 - brightness),
- 1 + brightness,
- seed=seed,
- dtype=tf.float32)
- return augment.brightness(image, brightness)
-
-
-def random_contrast(image: tf.Tensor,
- contrast: float = 0.,
- seed: Optional[int] = None) -> tf.Tensor:
- """Jitters contrast of an image, similarly to torchvision`s ColorJitter.
-
- Args:
- image (tf.Tensor): Of shape [height, width, 3] and type uint8.
- contrast (float, optional): Magnitude for contrast jitter. Defaults to 0.
- seed (int, optional): Random seed. Defaults to None.
-
- Returns:
- tf.Tensor: The augmented `image` of type uint8.
- """
- assert contrast >= 0, '`contrast` must be positive'
- contrast = tf.random.uniform([],
- max(0, 1 - contrast),
- 1 + contrast,
- seed=seed,
- dtype=tf.float32)
- return augment.contrast(image, contrast)
-
-
-def random_saturation(image: tf.Tensor,
- saturation: float = 0.,
- seed: Optional[int] = None) -> tf.Tensor:
- """Jitters saturation of an image, similarly to torchvision`s ColorJitter.
-
- Args:
- image (tf.Tensor): Of shape [height, width, 3] and type uint8.
- saturation (float, optional): Magnitude for saturation jitter. Defaults to
- 0.
- seed (int, optional): Random seed. Defaults to None.
-
- Returns:
- tf.Tensor: The augmented `image` of type uint8.
- """
- assert saturation >= 0, '`saturation` must be positive'
- saturation = tf.random.uniform([],
- max(0, 1 - saturation),
- 1 + saturation,
- seed=seed,
- dtype=tf.float32)
- return _saturation(image, saturation)
-
-
-def _saturation(image: tf.Tensor,
- saturation: Optional[float] = 0.) -> tf.Tensor:
- return augment.blend(
- tf.repeat(tf.image.rgb_to_grayscale(image), 3, axis=-1), image,
- saturation)
-
-
-def random_crop_image_with_boxes_and_labels(img, boxes, labels, min_scale,
- aspect_ratio_range,
- min_overlap_params, max_retry):
- """Crops a random slice from the input image.
-
- The function will correspondingly recompute the bounding boxes and filter out
- outside boxes and their labels.
-
- References:
- [1] End-to-End Object Detection with Transformers
- https://arxiv.org/abs/2005.12872
-
- The preprocessing steps:
- 1. Sample a minimum IoU overlap.
- 2. For each trial, sample the new image width, height, and top-left corner.
- 3. Compute the IoUs of bounding boxes with the cropped image and retry if
- the maximum IoU is below the sampled threshold.
- 4. Find boxes whose centers are in the cropped image.
- 5. Compute new bounding boxes in the cropped region and only select those
- boxes' labels.
-
- Args:
- img: a 'Tensor' of shape [height, width, 3] representing the input image.
- boxes: a 'Tensor' of shape [N, 4] representing the ground-truth bounding
- boxes with (ymin, xmin, ymax, xmax).
- labels: a 'Tensor' of shape [N,] representing the class labels of the boxes.
- min_scale: a 'float' in [0.0, 1.0) indicating the lower bound of the random
- scale variable.
- aspect_ratio_range: a list of two 'float' that specifies the lower and upper
- bound of the random aspect ratio.
- min_overlap_params: a list of four 'float' representing the min value, max
- value, step size, and offset for the minimum overlap sample.
- max_retry: an 'int' representing the number of trials for cropping. If it is
- exhausted, no cropping will be performed.
-
- Returns:
- img: a Tensor representing the random cropped image. Can be the
- original image if max_retry is exhausted.
- boxes: a Tensor representing the bounding boxes in the cropped image.
- labels: a Tensor representing the new bounding boxes' labels.
- """
-
- shape = tf.shape(img)
- original_h = shape[0]
- original_w = shape[1]
-
- minval, maxval, step, offset = min_overlap_params
-
- min_overlap = tf.math.floordiv(
- tf.random.uniform([], minval=minval, maxval=maxval), step) * step - offset
-
- min_overlap = tf.clip_by_value(min_overlap, 0.0, 1.1)
-
- if min_overlap > 1.0:
- return img, boxes, labels
-
- aspect_ratio_low = aspect_ratio_range[0]
- aspect_ratio_high = aspect_ratio_range[1]
-
- for _ in tf.range(max_retry):
- scale_h = tf.random.uniform([], min_scale, 1.0)
- scale_w = tf.random.uniform([], min_scale, 1.0)
- new_h = tf.cast(
- scale_h * tf.cast(original_h, dtype=tf.float32), dtype=tf.int32)
- new_w = tf.cast(
- scale_w * tf.cast(original_w, dtype=tf.float32), dtype=tf.int32)
-
- # Aspect ratio has to be in the prespecified range
- aspect_ratio = new_h / new_w
- if aspect_ratio_low > aspect_ratio or aspect_ratio > aspect_ratio_high:
- continue
-
- left = tf.random.uniform([], 0, original_w - new_w, dtype=tf.int32)
- right = left + new_w
- top = tf.random.uniform([], 0, original_h - new_h, dtype=tf.int32)
- bottom = top + new_h
-
- normalized_left = tf.cast(
- left, dtype=tf.float32) / tf.cast(
- original_w, dtype=tf.float32)
- normalized_right = tf.cast(
- right, dtype=tf.float32) / tf.cast(
- original_w, dtype=tf.float32)
- normalized_top = tf.cast(
- top, dtype=tf.float32) / tf.cast(
- original_h, dtype=tf.float32)
- normalized_bottom = tf.cast(
- bottom, dtype=tf.float32) / tf.cast(
- original_h, dtype=tf.float32)
-
- cropped_box = tf.expand_dims(
- tf.stack([
- normalized_top,
- normalized_left,
- normalized_bottom,
- normalized_right,
- ]),
- axis=0)
- iou = box_ops.bbox_overlap(
- tf.expand_dims(cropped_box, axis=0),
- tf.expand_dims(boxes, axis=0)) # (1, 1, n_ground_truth)
- iou = tf.squeeze(iou, axis=[0, 1])
-
- # If not a single bounding box has a Jaccard overlap of greater than
- # the minimum, try again
- if tf.reduce_max(iou) < min_overlap:
- continue
-
- centroids = box_ops.yxyx_to_cycxhw(boxes)
- mask = tf.math.logical_and(
- tf.math.logical_and(centroids[:, 0] > normalized_top,
- centroids[:, 0] < normalized_bottom),
- tf.math.logical_and(centroids[:, 1] > normalized_left,
- centroids[:, 1] < normalized_right))
- # If not a single bounding box has its center in the crop, try again.
- if tf.reduce_sum(tf.cast(mask, dtype=tf.int32)) > 0:
- indices = tf.squeeze(tf.where(mask), axis=1)
-
- filtered_boxes = tf.gather(boxes, indices)
-
- boxes = tf.clip_by_value(
- (filtered_boxes[..., :] * tf.cast(
- tf.stack([original_h, original_w, original_h, original_w]),
- dtype=tf.float32) -
- tf.cast(tf.stack([top, left, top, left]), dtype=tf.float32)) /
- tf.cast(tf.stack([new_h, new_w, new_h, new_w]), dtype=tf.float32),
- 0.0, 1.0)
-
- img = tf.image.crop_to_bounding_box(img, top, left, bottom - top,
- right - left)
-
- labels = tf.gather(labels, indices)
- break
-
- return img, boxes, labels
-
-
-def random_crop(image,
- boxes,
- labels,
- min_scale=0.3,
- aspect_ratio_range=(0.5, 2.0),
- min_overlap_params=(0.0, 1.4, 0.2, 0.1),
- max_retry=50,
- seed=None):
- """Randomly crop the image and boxes, filtering labels.
-
- Args:
- image: a 'Tensor' of shape [height, width, 3] representing the input image.
- boxes: a 'Tensor' of shape [N, 4] representing the ground-truth bounding
- boxes with (ymin, xmin, ymax, xmax).
- labels: a 'Tensor' of shape [N,] representing the class labels of the boxes.
- min_scale: a 'float' in [0.0, 1.0) indicating the lower bound of the random
- scale variable.
- aspect_ratio_range: a list of two 'float' that specifies the lower and upper
- bound of the random aspect ratio.
- min_overlap_params: a list of four 'float' representing the min value, max
- value, step size, and offset for the minimum overlap sample.
- max_retry: an 'int' representing the number of trials for cropping. If it is
- exhausted, no cropping will be performed.
- seed: the random number seed of int, but could be None.
-
- Returns:
- image: a Tensor representing the random cropped image. Can be the
- original image if max_retry is exhausted.
- boxes: a Tensor representing the bounding boxes in the cropped image.
- labels: a Tensor representing the new bounding boxes' labels.
- """
- with tf.name_scope('random_crop'):
- do_crop = tf.greater(tf.random.uniform([], seed=seed), 0.5)
- if do_crop:
- return random_crop_image_with_boxes_and_labels(image, boxes, labels,
- min_scale,
- aspect_ratio_range,
- min_overlap_params,
- max_retry)
- else:
- return image, boxes, labels
diff --git a/official/vision/beta/ops/preprocess_ops_3d.py b/official/vision/beta/ops/preprocess_ops_3d.py
deleted file mode 100644
index 16ab2dd6e0dfb6223a746b70484d106d049de69b..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/preprocess_ops_3d.py
+++ /dev/null
@@ -1,355 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Utils for processing video dataset features."""
-
-from typing import Optional, Tuple
-import tensorflow as tf
-
-
-def _sample_or_pad_sequence_indices(sequence: tf.Tensor,
- num_steps: int,
- stride: int,
- offset: tf.Tensor) -> tf.Tensor:
- """Returns indices to take for sampling or padding sequences to fixed size."""
- sequence_length = tf.shape(sequence)[0]
- sel_idx = tf.range(sequence_length)
-
- # Repeats sequence until num_steps are available in total.
- max_length = num_steps * stride + offset
- num_repeats = tf.math.floordiv(
- max_length + sequence_length - 1, sequence_length)
- sel_idx = tf.tile(sel_idx, [num_repeats])
-
- steps = tf.range(offset, offset + num_steps * stride, stride)
- return tf.gather(sel_idx, steps)
-
-
-def sample_linspace_sequence(sequence: tf.Tensor,
- num_windows: int,
- num_steps: int,
- stride: int) -> tf.Tensor:
- """Samples `num_windows` segments from sequence with linearly spaced offsets.
-
- The samples are concatenated in a single `tf.Tensor` in order to have the same
- format structure per timestep (e.g. a single frame). If `num_steps` * `stride`
- is bigger than the number of timesteps, the sequence is repeated. This
- function can be used in evaluation in order to extract enough segments to span
- the entire sequence.
-
- Args:
- sequence: Any tensor where the first dimension is timesteps.
- num_windows: Number of windows retrieved from the sequence.
- num_steps: Number of steps (e.g. frames) to take.
- stride: Distance to sample between timesteps.
-
- Returns:
- A single `tf.Tensor` with first dimension `num_windows` * `num_steps`. The
- tensor contains the concatenated list of `num_windows` tensors which offsets
- have been linearly spaced from input.
- """
- sequence_length = tf.shape(sequence)[0]
- max_offset = tf.maximum(0, sequence_length - num_steps * stride)
- offsets = tf.linspace(0.0, tf.cast(max_offset, tf.float32), num_windows)
- offsets = tf.cast(offsets, tf.int32)
-
- all_indices = []
- for i in range(num_windows):
- all_indices.append(_sample_or_pad_sequence_indices(
- sequence=sequence,
- num_steps=num_steps,
- stride=stride,
- offset=offsets[i]))
-
- indices = tf.concat(all_indices, axis=0)
- indices.set_shape((num_windows * num_steps,))
- return tf.gather(sequence, indices)
-
-
-def sample_sequence(sequence: tf.Tensor,
- num_steps: int,
- random: bool,
- stride: int,
- seed: Optional[int] = None) -> tf.Tensor:
- """Samples a single segment of size `num_steps` from a given sequence.
-
- If `random` is not `True`, this function will simply sample the central window
- of the sequence. Otherwise, a random offset will be chosen in a way that the
- desired `num_steps` might be extracted from the sequence.
-
- Args:
- sequence: Any tensor where the first dimension is timesteps.
- num_steps: Number of steps (e.g. frames) to take.
- random: A boolean indicating whether to random sample the single window. If
- `True`, the offset is randomized. If `False`, the middle frame minus half
- of `num_steps` is the first frame.
- stride: Distance to sample between timesteps.
- seed: A deterministic seed to use when sampling.
-
- Returns:
- A single `tf.Tensor` with first dimension `num_steps` with the sampled
- segment.
- """
- sequence_length = tf.shape(sequence)[0]
-
- if random:
- sequence_length = tf.cast(sequence_length, tf.float32)
- frame_stride = tf.cast(stride, tf.float32)
- max_offset = tf.cond(
- sequence_length > (num_steps - 1) * frame_stride,
- lambda: sequence_length - (num_steps - 1) * frame_stride,
- lambda: sequence_length)
- offset = tf.random.uniform(
- (),
- maxval=tf.cast(max_offset, dtype=tf.int32),
- dtype=tf.int32,
- seed=seed)
- else:
- offset = (sequence_length - num_steps * stride) // 2
- offset = tf.maximum(0, offset)
-
- indices = _sample_or_pad_sequence_indices(
- sequence=sequence,
- num_steps=num_steps,
- stride=stride,
- offset=offset)
- indices.set_shape((num_steps,))
-
- return tf.gather(sequence, indices)
-
-
-def decode_jpeg(image_string: tf.Tensor, channels: int = 0) -> tf.Tensor:
- """Decodes JPEG raw bytes string into a RGB uint8 Tensor.
-
- Args:
- image_string: A `tf.Tensor` of type strings with the raw JPEG bytes where
- the first dimension is timesteps.
- channels: Number of channels of the JPEG image. Allowed values are 0, 1 and
- 3. If 0, the number of channels will be calculated at runtime and no
- static shape is set.
-
- Returns:
- A Tensor of shape [T, H, W, C] of type uint8 with the decoded images.
- """
- return tf.map_fn(
- lambda x: tf.image.decode_jpeg(x, channels=channels),
- image_string, back_prop=False, dtype=tf.uint8)
-
-
-def crop_image(frames: tf.Tensor,
- target_height: int,
- target_width: int,
- random: bool = False,
- num_crops: int = 1,
- seed: Optional[int] = None) -> tf.Tensor:
- """Crops the image sequence of images.
-
- If requested size is bigger than image size, image is padded with 0. If not
- random cropping, a central crop is performed if num_crops is 1.
-
- Args:
- frames: A Tensor of dimension [timesteps, in_height, in_width, channels].
- target_height: Target cropped image height.
- target_width: Target cropped image width.
- random: A boolean indicating if crop should be randomized.
- num_crops: Number of crops (support 1 for central crop and 3 for 3-crop).
- seed: A deterministic seed to use when random cropping.
-
- Returns:
- A Tensor of shape [timesteps, out_height, out_width, channels] of type uint8
- with the cropped images.
- """
- if random:
- # Random spatial crop.
- shape = tf.shape(frames)
- # If a static_shape is available (e.g. when using this method from add_image
- # method), it will be used to have an output tensor with static shape.
- static_shape = frames.shape.as_list()
- seq_len = shape[0] if static_shape[0] is None else static_shape[0]
- channels = shape[3] if static_shape[3] is None else static_shape[3]
- frames = tf.image.random_crop(
- frames, (seq_len, target_height, target_width, channels), seed)
- else:
- if num_crops == 1:
- # Central crop or pad.
- frames = tf.image.resize_with_crop_or_pad(frames, target_height,
- target_width)
-
- elif num_crops == 3:
- # Three-crop evaluation.
- shape = tf.shape(frames)
- static_shape = frames.shape.as_list()
- seq_len = shape[0] if static_shape[0] is None else static_shape[0]
- height = shape[1] if static_shape[1] is None else static_shape[1]
- width = shape[2] if static_shape[2] is None else static_shape[2]
- channels = shape[3] if static_shape[3] is None else static_shape[3]
-
- size = tf.convert_to_tensor(
- (seq_len, target_height, target_width, channels))
-
- offset_1 = tf.broadcast_to([0, 0, 0, 0], [4])
- # pylint:disable=g-long-lambda
- offset_2 = tf.cond(
- tf.greater_equal(height, width),
- true_fn=lambda: tf.broadcast_to([
- 0, tf.cast(height, tf.float32) / 2 - target_height // 2, 0, 0
- ], [4]),
- false_fn=lambda: tf.broadcast_to([
- 0, 0, tf.cast(width, tf.float32) / 2 - target_width // 2, 0
- ], [4]))
- offset_3 = tf.cond(
- tf.greater_equal(height, width),
- true_fn=lambda: tf.broadcast_to(
- [0, tf.cast(height, tf.float32) - target_height, 0, 0], [4]),
- false_fn=lambda: tf.broadcast_to(
- [0, 0, tf.cast(width, tf.float32) - target_width, 0], [4]))
- # pylint:disable=g-long-lambda
-
- crops = []
- for offset in [offset_1, offset_2, offset_3]:
- offset = tf.cast(tf.math.round(offset), tf.int32)
- crops.append(tf.slice(frames, offset, size))
- frames = tf.concat(crops, axis=0)
-
- else:
- raise NotImplementedError(
- f"Only 1-crop and 3-crop are supported. Found {num_crops!r}.")
-
- return frames
-
-
-def resize_smallest(frames: tf.Tensor,
- min_resize: int) -> tf.Tensor:
- """Resizes frames so that min(`height`, `width`) is equal to `min_resize`.
-
- This function will not do anything if the min(`height`, `width`) is already
- equal to `min_resize`. This allows to save compute time.
-
- Args:
- frames: A Tensor of dimension [timesteps, input_h, input_w, channels].
- min_resize: Minimum size of the final image dimensions.
-
- Returns:
- A Tensor of shape [timesteps, output_h, output_w, channels] of type
- frames.dtype where min(output_h, output_w) = min_resize.
- """
- shape = tf.shape(frames)
- input_h = shape[1]
- input_w = shape[2]
-
- output_h = tf.maximum(min_resize, (input_h * min_resize) // input_w)
- output_w = tf.maximum(min_resize, (input_w * min_resize) // input_h)
-
- def resize_fn():
- frames_resized = tf.image.resize(frames, (output_h, output_w))
- return tf.cast(frames_resized, frames.dtype)
-
- should_resize = tf.math.logical_or(tf.not_equal(input_w, output_w),
- tf.not_equal(input_h, output_h))
- frames = tf.cond(should_resize, resize_fn, lambda: frames)
-
- return frames
-
-
-def random_crop_resize(frames: tf.Tensor,
- output_h: int,
- output_w: int,
- num_frames: int,
- num_channels: int,
- aspect_ratio: Tuple[float, float],
- area_range: Tuple[float, float]) -> tf.Tensor:
- """First crops clip with jittering and then resizes to (output_h, output_w).
-
- Args:
- frames: A Tensor of dimension [timesteps, input_h, input_w, channels].
- output_h: Resized image height.
- output_w: Resized image width.
- num_frames: Number of input frames per clip.
- num_channels: Number of channels of the clip.
- aspect_ratio: Float tuple with the aspect range for cropping.
- area_range: Float tuple with the area range for cropping.
- Returns:
- A Tensor of shape [timesteps, output_h, output_w, channels] of type
- frames.dtype.
- """
- shape = tf.shape(frames)
- seq_len, _, _, channels = shape[0], shape[1], shape[2], shape[3]
- bbox = tf.constant([0.0, 0.0, 1.0, 1.0], dtype=tf.float32, shape=[1, 1, 4])
- factor = output_w / output_h
- aspect_ratio = (aspect_ratio[0] * factor, aspect_ratio[1] * factor)
- sample_distorted_bbox = tf.image.sample_distorted_bounding_box(
- shape[1:],
- bounding_boxes=bbox,
- min_object_covered=0.1,
- aspect_ratio_range=aspect_ratio,
- area_range=area_range,
- max_attempts=100,
- use_image_if_no_bounding_boxes=True)
- bbox_begin, bbox_size, _ = sample_distorted_bbox
- offset_y, offset_x, _ = tf.unstack(bbox_begin)
- target_height, target_width, _ = tf.unstack(bbox_size)
- size = tf.convert_to_tensor((
- seq_len, target_height, target_width, channels))
- offset = tf.convert_to_tensor((
- 0, offset_y, offset_x, 0))
- frames = tf.slice(frames, offset, size)
- frames = tf.cast(
- tf.image.resize(frames, (output_h, output_w)),
- frames.dtype)
- frames.set_shape((num_frames, output_h, output_w, num_channels))
- return frames
-
-
-def random_flip_left_right(
- frames: tf.Tensor,
- seed: Optional[int] = None) -> tf.Tensor:
- """Flips all the frames with a probability of 50%.
-
- Args:
- frames: A Tensor of shape [timesteps, input_h, input_w, channels].
- seed: A seed to use for the random sampling.
-
- Returns:
- A Tensor of shape [timesteps, output_h, output_w, channels] eventually
- flipped left right.
- """
- is_flipped = tf.random.uniform(
- (), minval=0, maxval=2, dtype=tf.int32, seed=seed)
-
- frames = tf.cond(tf.equal(is_flipped, 1),
- true_fn=lambda: tf.image.flip_left_right(frames),
- false_fn=lambda: frames)
- return frames
-
-
-def normalize_image(frames: tf.Tensor,
- zero_centering_image: bool,
- dtype: tf.dtypes.DType = tf.float32) -> tf.Tensor:
- """Normalizes images.
-
- Args:
- frames: A Tensor of numbers.
- zero_centering_image: If True, results are in [-1, 1], if False, results are
- in [0, 1].
- dtype: Type of output Tensor.
-
- Returns:
- A Tensor of same shape as the input and of the given type.
- """
- frames = tf.cast(frames, dtype)
- if zero_centering_image:
- return frames * (2.0 / 255.0) - 1.0
- else:
- return frames / 255.0
diff --git a/official/vision/beta/ops/preprocess_ops_3d_test.py b/official/vision/beta/ops/preprocess_ops_3d_test.py
deleted file mode 100644
index ccad05fa9c39a9a23dec8ce82c7585a2bd984295..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/preprocess_ops_3d_test.py
+++ /dev/null
@@ -1,159 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-
-import io
-import itertools
-import numpy as np
-from PIL import Image
-import tensorflow as tf
-
-from official.vision.beta.ops import preprocess_ops_3d
-
-
-class ParserUtilsTest(tf.test.TestCase):
-
- def setUp(self):
- super().setUp()
- # [[0, 1, ..., 119], [1, 2, ..., 120], ..., [119, 120, ..., 218]].
- self._frames = tf.stack([tf.range(i, i + 120) for i in range(90)])
- self._frames = tf.cast(self._frames, tf.uint8)
- self._frames = self._frames[tf.newaxis, :, :, tf.newaxis]
- self._frames = tf.broadcast_to(self._frames, (6, 90, 120, 3))
-
- # Create an equivalent numpy array for assertions.
- self._np_frames = np.array([range(i, i + 120) for i in range(90)])
- self._np_frames = self._np_frames[np.newaxis, :, :, np.newaxis]
- self._np_frames = np.broadcast_to(self._np_frames, (6, 90, 120, 3))
-
- def test_sample_linspace_sequence(self):
- sequence = tf.range(100)
- sampled_seq_1 = preprocess_ops_3d.sample_linspace_sequence(
- sequence, 10, 10, 1)
- sampled_seq_2 = preprocess_ops_3d.sample_linspace_sequence(
- sequence, 7, 10, 1)
- sampled_seq_3 = preprocess_ops_3d.sample_linspace_sequence(
- sequence, 7, 5, 2)
- sampled_seq_4 = preprocess_ops_3d.sample_linspace_sequence(
- sequence, 101, 1, 1)
-
- self.assertAllEqual(sampled_seq_1, range(100))
- # [0, 1, 2, 3, 4, ..., 8, 9, 15, 16, ..., 97, 98, 99]
- self.assertAllEqual(
- sampled_seq_2,
- [15 * i + j for i, j in itertools.product(range(7), range(10))])
- # [0, 2, 4, 6, 8, 15, 17, 19, ..., 96, 98]
- self.assertAllEqual(
- sampled_seq_3,
- [15 * i + 2 * j for i, j in itertools.product(range(7), range(5))])
- self.assertAllEqual(sampled_seq_4, [0] + list(range(100)))
-
- def test_sample_sequence(self):
- sequence = tf.range(100)
- sampled_seq_1 = preprocess_ops_3d.sample_sequence(sequence, 10, False, 1)
- sampled_seq_2 = preprocess_ops_3d.sample_sequence(sequence, 10, False, 2)
- sampled_seq_3 = preprocess_ops_3d.sample_sequence(sequence, 10, True, 1)
-
- self.assertAllEqual(sampled_seq_1, range(45, 55))
- self.assertAllEqual(sampled_seq_2, range(40, 60, 2))
-
- offset_3 = sampled_seq_3[0]
- self.assertBetween(offset_3, 0, 99)
- self.assertAllEqual(sampled_seq_3, range(offset_3, offset_3 + 10))
-
- def test_decode_jpeg(self):
- # Create a random RGB JPEG image.
- random_image = np.random.randint(0, 256, size=(263, 320, 3), dtype=np.uint8)
- random_image = Image.fromarray(random_image)
- with io.BytesIO() as buffer:
- random_image.save(buffer, format='JPEG')
- raw_image_bytes = buffer.getvalue()
-
- raw_image = tf.constant([raw_image_bytes, raw_image_bytes])
- decoded_image = preprocess_ops_3d.decode_jpeg(raw_image, 3)
-
- self.assertEqual(decoded_image.shape.as_list()[3], 3)
- self.assertAllEqual(decoded_image.shape, (2, 263, 320, 3))
-
- def test_crop_image(self):
- cropped_image_1 = preprocess_ops_3d.crop_image(self._frames, 50, 70)
- cropped_image_2 = preprocess_ops_3d.crop_image(self._frames, 200, 200)
- cropped_image_3 = preprocess_ops_3d.crop_image(self._frames, 50, 70, True)
- cropped_image_4 = preprocess_ops_3d.crop_image(
- self._frames, 90, 90, False, 3)
-
- self.assertAllEqual(cropped_image_1.shape, (6, 50, 70, 3))
- self.assertAllEqual(cropped_image_1, self._np_frames[:, 20:70, 25:95, :])
-
- self.assertAllEqual(cropped_image_2.shape, (6, 200, 200, 3))
- expected = np.pad(
- self._np_frames, ((0, 0), (55, 55), (40, 40), (0, 0)), 'constant')
- self.assertAllEqual(cropped_image_2, expected)
-
- self.assertAllEqual(cropped_image_3.shape, (6, 50, 70, 3))
- offset = cropped_image_3[0, 0, 0, 0]
- expected = np.array([range(i, i + 70) for i in range(offset, offset + 50)])
- expected = expected[np.newaxis, :, :, np.newaxis]
- expected = np.broadcast_to(expected, (6, 50, 70, 3))
- self.assertAllEqual(cropped_image_3, expected)
- self.assertAllEqual(cropped_image_4.shape, (18, 90, 90, 3))
-
- def test_resize_smallest(self):
- resized_frames_1 = preprocess_ops_3d.resize_smallest(self._frames, 180)
- resized_frames_2 = preprocess_ops_3d.resize_smallest(self._frames, 45)
- resized_frames_3 = preprocess_ops_3d.resize_smallest(self._frames, 90)
- resized_frames_4 = preprocess_ops_3d.resize_smallest(
- tf.transpose(self._frames, (0, 2, 1, 3)), 45)
-
- self.assertAllEqual(resized_frames_1.shape, (6, 180, 240, 3))
- self.assertAllEqual(resized_frames_2.shape, (6, 45, 60, 3))
- self.assertAllEqual(resized_frames_3.shape, (6, 90, 120, 3))
- self.assertAllEqual(resized_frames_4.shape, (6, 60, 45, 3))
-
- def test_random_crop_resize(self):
- resized_frames_1 = preprocess_ops_3d.random_crop_resize(
- self._frames, 256, 256, 6, 3, (0.5, 2), (0.3, 1))
- resized_frames_2 = preprocess_ops_3d.random_crop_resize(
- self._frames, 224, 224, 6, 3, (0.5, 2), (0.3, 1))
- resized_frames_3 = preprocess_ops_3d.random_crop_resize(
- self._frames, 256, 256, 6, 3, (0.8, 1.2), (0.3, 1))
- resized_frames_4 = preprocess_ops_3d.random_crop_resize(
- self._frames, 256, 256, 6, 3, (0.5, 2), (0.1, 1))
- self.assertAllEqual(resized_frames_1.shape, (6, 256, 256, 3))
- self.assertAllEqual(resized_frames_2.shape, (6, 224, 224, 3))
- self.assertAllEqual(resized_frames_3.shape, (6, 256, 256, 3))
- self.assertAllEqual(resized_frames_4.shape, (6, 256, 256, 3))
-
- def test_random_flip_left_right(self):
- flipped_frames = preprocess_ops_3d.random_flip_left_right(self._frames)
-
- flipped = np.fliplr(self._np_frames[0, :, :, 0])
- flipped = flipped[np.newaxis, :, :, np.newaxis]
- flipped = np.broadcast_to(flipped, (6, 90, 120, 3))
- self.assertTrue((flipped_frames == self._np_frames).numpy().all() or (
- flipped_frames == flipped).numpy().all())
-
- def test_normalize_image(self):
- normalized_images_1 = preprocess_ops_3d.normalize_image(
- self._frames, False, tf.float32)
- normalized_images_2 = preprocess_ops_3d.normalize_image(
- self._frames, True, tf.float32)
-
- self.assertAllClose(normalized_images_1, self._np_frames / 255)
- self.assertAllClose(normalized_images_2, self._np_frames * 2 / 255 - 1.0)
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/ops/preprocess_ops_test.py b/official/vision/beta/ops/preprocess_ops_test.py
deleted file mode 100644
index 1ec56bf79557c8c82717e055f5c0f425f6b5c5a8..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/preprocess_ops_test.py
+++ /dev/null
@@ -1,246 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for preprocess_ops.py."""
-
-import io
-# Import libraries
-from absl.testing import parameterized
-import numpy as np
-from PIL import Image
-import tensorflow as tf
-
-from official.vision.beta.ops import preprocess_ops
-
-
-def _encode_image(image_array, fmt):
- image = Image.fromarray(image_array)
- with io.BytesIO() as output:
- image.save(output, format=fmt)
- return output.getvalue()
-
-
-class InputUtilsTest(parameterized.TestCase, tf.test.TestCase):
-
- @parameterized.parameters(
- ([1], 10),
- ([1, 2], 10),
- ([1, 2, 3], 10),
- ([11], 10),
- ([12, 2], 10),
- ([13, 2, 3], 10),
- )
- def test_pad_to_fixed_size(self, input_shape, output_size):
- # Copies input shape to padding shape.
- clip_shape = input_shape[:]
- clip_shape[0] = min(output_size, clip_shape[0])
- padding_shape = input_shape[:]
- padding_shape[0] = max(output_size - input_shape[0], 0)
- expected_outputs = np.concatenate(
- [np.ones(clip_shape), np.zeros(padding_shape)], axis=0)
-
- data = tf.ones(input_shape)
- output_data = preprocess_ops.clip_or_pad_to_fixed_size(
- data, output_size, constant_values=0)
- output_data = output_data.numpy()
- self.assertAllClose(output_size, output_data.shape[0])
- self.assertAllClose(expected_outputs, output_data)
-
- @parameterized.parameters(
- (100, 200, 100, 200, 32, 1.0, 1.0, 128, 224),
- (100, 256, 128, 256, 32, 1.0, 1.0, 128, 256),
- (200, 512, 200, 128, 32, 0.25, 0.25, 224, 128),
- )
- def test_resize_and_crop_image_rectangluar_case(self, input_height,
- input_width, desired_height,
- desired_width, stride,
- scale_y, scale_x,
- output_height, output_width):
- image = tf.convert_to_tensor(
- np.random.rand(input_height, input_width, 3))
-
- desired_size = (desired_height, desired_width)
- resized_image, image_info = preprocess_ops.resize_and_crop_image(
- image,
- desired_size=desired_size,
- padded_size=preprocess_ops.compute_padded_size(desired_size, stride))
- resized_image_shape = tf.shape(resized_image)
-
- self.assertAllEqual(
- [output_height, output_width, 3],
- resized_image_shape.numpy())
- self.assertNDArrayNear(
- [[input_height, input_width],
- [desired_height, desired_width],
- [scale_y, scale_x],
- [0.0, 0.0]],
- image_info.numpy(),
- 1e-5)
-
- @parameterized.parameters(
- (100, 200, 220, 220, 32, 1.1, 1.1, 224, 224),
- (512, 512, 1024, 1024, 32, 2.0, 2.0, 1024, 1024),
- )
- def test_resize_and_crop_image_square_case(self, input_height, input_width,
- desired_height, desired_width,
- stride, scale_y, scale_x,
- output_height, output_width):
- image = tf.convert_to_tensor(
- np.random.rand(input_height, input_width, 3))
-
- desired_size = (desired_height, desired_width)
- resized_image, image_info = preprocess_ops.resize_and_crop_image(
- image,
- desired_size=desired_size,
- padded_size=preprocess_ops.compute_padded_size(desired_size, stride))
- resized_image_shape = tf.shape(resized_image)
-
- self.assertAllEqual(
- [output_height, output_width, 3],
- resized_image_shape.numpy())
- self.assertNDArrayNear(
- [[input_height, input_width],
- [desired_height, desired_width],
- [scale_y, scale_x],
- [0.0, 0.0]],
- image_info.numpy(),
- 1e-5)
-
- @parameterized.parameters(
- (100, 200, 100, 300, 32, 1.0, 1.0, 100, 200, 128, 320),
- (200, 100, 100, 300, 32, 1.0, 1.0, 200, 100, 320, 128),
- (100, 200, 80, 100, 32, 0.5, 0.5, 50, 100, 96, 128),
- (200, 100, 80, 100, 32, 0.5, 0.5, 100, 50, 128, 96),
- )
- def test_resize_and_crop_image_v2(self, input_height, input_width, short_side,
- long_side, stride, scale_y, scale_x,
- desired_height, desired_width,
- output_height, output_width):
- image = tf.convert_to_tensor(
- np.random.rand(input_height, input_width, 3))
- image_shape = tf.shape(image)[0:2]
-
- desired_size = tf.where(
- tf.greater(image_shape[0], image_shape[1]),
- tf.constant([long_side, short_side], dtype=tf.int32),
- tf.constant([short_side, long_side], dtype=tf.int32))
- resized_image, image_info = preprocess_ops.resize_and_crop_image_v2(
- image,
- short_side=short_side,
- long_side=long_side,
- padded_size=preprocess_ops.compute_padded_size(desired_size, stride))
- resized_image_shape = tf.shape(resized_image)
-
- self.assertAllEqual(
- [output_height, output_width, 3],
- resized_image_shape.numpy())
- self.assertNDArrayNear(
- [[input_height, input_width],
- [desired_height, desired_width],
- [scale_y, scale_x],
- [0.0, 0.0]],
- image_info.numpy(),
- 1e-5)
-
- @parameterized.parameters(
- (400, 600), (600, 400),
- )
- def test_center_crop_image(self, input_height, input_width):
- image = tf.convert_to_tensor(
- np.random.rand(input_height, input_width, 3))
- cropped_image = preprocess_ops.center_crop_image(image)
- cropped_image_shape = tf.shape(cropped_image)
- self.assertAllEqual([350, 350, 3], cropped_image_shape.numpy())
-
- @parameterized.parameters(
- (400, 600), (600, 400),
- )
- def test_center_crop_image_v2(self, input_height, input_width):
- image_bytes = tf.constant(
- _encode_image(
- np.uint8(np.random.rand(input_height, input_width, 3) * 255),
- fmt='JPEG'),
- dtype=tf.string)
- cropped_image = preprocess_ops.center_crop_image_v2(
- image_bytes, tf.constant([input_height, input_width, 3], tf.int32))
- cropped_image_shape = tf.shape(cropped_image)
- self.assertAllEqual([350, 350, 3], cropped_image_shape.numpy())
-
- @parameterized.parameters(
- (400, 600), (600, 400),
- )
- def test_random_crop_image(self, input_height, input_width):
- image = tf.convert_to_tensor(
- np.random.rand(input_height, input_width, 3))
- _ = preprocess_ops.random_crop_image(image)
-
- @parameterized.parameters(
- (400, 600), (600, 400),
- )
- def test_random_crop_image_v2(self, input_height, input_width):
- image_bytes = tf.constant(
- _encode_image(
- np.uint8(np.random.rand(input_height, input_width, 3) * 255),
- fmt='JPEG'),
- dtype=tf.string)
- _ = preprocess_ops.random_crop_image_v2(
- image_bytes, tf.constant([input_height, input_width, 3], tf.int32))
-
- @parameterized.parameters((400, 600, 0), (400, 600, 0.4), (600, 400, 1.4))
- def testColorJitter(self, input_height, input_width, color_jitter):
- image = tf.convert_to_tensor(np.random.rand(input_height, input_width, 3))
- jittered_image = preprocess_ops.color_jitter(image, color_jitter,
- color_jitter, color_jitter)
- assert jittered_image.shape == image.shape
-
- @parameterized.parameters((400, 600, 0), (400, 600, 0.4), (600, 400, 1))
- def testSaturation(self, input_height, input_width, saturation):
- image = tf.convert_to_tensor(np.random.rand(input_height, input_width, 3))
- jittered_image = preprocess_ops._saturation(image, saturation)
- assert jittered_image.shape == image.shape
-
- @parameterized.parameters((640, 640, 20), (1280, 1280, 30))
- def test_random_crop(self, input_height, input_width, num_boxes):
- image = tf.convert_to_tensor(np.random.rand(input_height, input_width, 3))
- boxes_height = np.random.randint(0, input_height, size=(num_boxes, 1))
- top = np.random.randint(0, high=(input_height - boxes_height))
- down = top + boxes_height
- boxes_width = np.random.randint(0, input_width, size=(num_boxes, 1))
- left = np.random.randint(0, high=(input_width - boxes_width))
- right = left + boxes_width
- boxes = tf.constant(
- np.concatenate([top, left, down, right], axis=-1), tf.float32)
- labels = tf.constant(
- np.random.randint(low=0, high=num_boxes, size=(num_boxes,)), tf.int64)
- _ = preprocess_ops.random_crop(image, boxes, labels)
-
- @parameterized.parameters(
- ((640, 640, 3), (1000, 1000), None, (1000, 1000, 3)),
- ((1280, 640, 3), 320, None, (640, 320, 3)),
- ((640, 1280, 3), 320, None, (320, 640, 3)),
- ((640, 640, 3), 320, 100, (100, 100, 3)))
- def test_resize_image(self, input_shape, size, max_size, expected_shape):
- resized_img, image_info = preprocess_ops.resize_image(
- tf.zeros((input_shape)), size, max_size)
- self.assertAllEqual(tf.shape(resized_img), expected_shape)
- self.assertAllEqual(image_info[0], input_shape[:-1])
- self.assertAllEqual(image_info[1], expected_shape[:-1])
- self.assertAllEqual(
- image_info[2],
- np.array(expected_shape[:-1]) / np.array(input_shape[:-1]))
- self.assertAllEqual(image_info[3], [0, 0])
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/ops/sampling_ops.py b/official/vision/beta/ops/sampling_ops.py
deleted file mode 100644
index f86979e13cbaafa274fb87f9eee791caa88b122c..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/sampling_ops.py
+++ /dev/null
@@ -1,383 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Class to subsample minibatches by balancing positives and negatives.
-
-Subsamples minibatches based on a pre-specified positive fraction in range
-[0,1]. The class presumes there are many more negatives than positive examples:
-if the desired batch_size cannot be achieved with the pre-specified positive
-fraction, it fills the rest with negative examples. If this is not sufficient
-for obtaining the desired batch_size, it returns fewer examples.
-
-The main function to call is Subsample(self, indicator, labels). For convenience
-one can also call SubsampleWeights(self, weights, labels) which is defined in
-the minibatch_sampler base class.
-
-When is_static is True, it implements a method that guarantees static shapes.
-It also ensures the length of output of the subsample is always batch_size, even
-when number of examples set to True in indicator is less than batch_size.
-
-This is originally implemented in TensorFlow Object Detection API.
-"""
-
-# Import libraries
-import tensorflow as tf
-
-
-def combined_static_and_dynamic_shape(tensor):
- """Returns a list containing static and dynamic values for the dimensions.
-
- Returns a list of static and dynamic values for shape dimensions. This is
- useful to preserve static shapes when available in reshape operation.
-
- Args:
- tensor: A tensor of any type.
-
- Returns:
- A list of size tensor.shape.ndims containing integers or a scalar tensor.
- """
- static_tensor_shape = tensor.shape.as_list()
- dynamic_tensor_shape = tf.shape(input=tensor)
- combined_shape = []
- for index, dim in enumerate(static_tensor_shape):
- if dim is not None:
- combined_shape.append(dim)
- else:
- combined_shape.append(dynamic_tensor_shape[index])
- return combined_shape
-
-
-def indices_to_dense_vector(indices,
- size,
- indices_value=1.,
- default_value=0,
- dtype=tf.float32):
- """Creates dense vector with indices set to specific value and rest to zeros.
-
- This function exists because it is unclear if it is safe to use
- tf.sparse_to_dense(indices, [size], 1, validate_indices=False)
- with indices which are not ordered.
- This function accepts a dynamic size (e.g. tf.shape(tensor)[0])
-
- Args:
- indices: 1d Tensor with integer indices which are to be set to
- indices_values.
- size: scalar with size (integer) of output Tensor.
- indices_value: values of elements specified by indices in the output vector
- default_value: values of other elements in the output vector.
- dtype: data type.
-
- Returns:
- dense 1D Tensor of shape [size] with indices set to indices_values and the
- rest set to default_value.
- """
- size = tf.cast(size, dtype=tf.int32)
- zeros = tf.ones([size], dtype=dtype) * default_value
- values = tf.ones_like(indices, dtype=dtype) * indices_value
-
- return tf.dynamic_stitch(
- [tf.range(size), tf.cast(indices, dtype=tf.int32)], [zeros, values])
-
-
-def matmul_gather_on_zeroth_axis(params, indices, scope=None):
- """Matrix multiplication based implementation of tf.gather on zeroth axis.
-
- TODO(rathodv, jonathanhuang): enable sparse matmul option.
-
- Args:
- params: A float32 Tensor. The tensor from which to gather values.
- Must be at least rank 1.
- indices: A Tensor. Must be one of the following types: int32, int64.
- Must be in range [0, params.shape[0])
- scope: A name for the operation (optional).
-
- Returns:
- A Tensor. Has the same type as params. Values from params gathered
- from indices given by indices, with shape indices.shape + params.shape[1:].
- """
- scope = scope or 'MatMulGather'
- with tf.name_scope(scope):
- params_shape = combined_static_and_dynamic_shape(params)
- indices_shape = combined_static_and_dynamic_shape(indices)
- params2d = tf.reshape(params, [params_shape[0], -1])
- indicator_matrix = tf.one_hot(indices, params_shape[0])
- gathered_result_flattened = tf.matmul(indicator_matrix, params2d)
- return tf.reshape(gathered_result_flattened,
- tf.stack(indices_shape + params_shape[1:]))
-
-
-class BalancedPositiveNegativeSampler:
- """Subsamples minibatches to a desired balance of positives and negatives."""
-
- def __init__(self, positive_fraction=0.5, is_static=False):
- """Constructs a minibatch sampler.
-
- Args:
- positive_fraction: desired fraction of positive examples (scalar in [0,1])
- in the batch.
- is_static: If True, uses an implementation with static shape guarantees.
-
- Raises:
- ValueError: if positive_fraction < 0, or positive_fraction > 1
- """
- if positive_fraction < 0 or positive_fraction > 1:
- raise ValueError('positive_fraction should be in range [0,1]. '
- 'Received: %s.' % positive_fraction)
- self._positive_fraction = positive_fraction
- self._is_static = is_static
-
- @staticmethod
- def subsample_indicator(indicator, num_samples):
- """Subsample indicator vector.
-
- Given a boolean indicator vector with M elements set to `True`, the function
- assigns all but `num_samples` of these previously `True` elements to
- `False`. If `num_samples` is greater than M, the original indicator vector
- is returned.
-
- Args:
- indicator: a 1-dimensional boolean tensor indicating which elements
- are allowed to be sampled and which are not.
- num_samples: int32 scalar tensor
-
- Returns:
- a boolean tensor with the same shape as input (indicator) tensor
- """
- indices = tf.where(indicator)
- indices = tf.random.shuffle(indices)
- indices = tf.reshape(indices, [-1])
-
- num_samples = tf.minimum(tf.size(input=indices), num_samples)
- selected_indices = tf.slice(indices, [0], tf.reshape(num_samples, [1]))
-
- selected_indicator = indices_to_dense_vector(
- selected_indices,
- tf.shape(input=indicator)[0])
-
- return tf.equal(selected_indicator, 1)
-
- def _get_num_pos_neg_samples(self, sorted_indices_tensor, sample_size):
- """Counts the number of positives and negatives numbers to be sampled.
-
- Args:
- sorted_indices_tensor: A sorted int32 tensor of shape [N] which contains
- the signed indices of the examples where the sign is based on the label
- value. The examples that cannot be sampled are set to 0. It samples
- at most sample_size*positive_fraction positive examples and remaining
- from negative examples.
- sample_size: Size of subsamples.
-
- Returns:
- A tuple containing the number of positive and negative labels in the
- subsample.
- """
- input_length = tf.shape(input=sorted_indices_tensor)[0]
- valid_positive_index = tf.greater(sorted_indices_tensor,
- tf.zeros(input_length, tf.int32))
- num_sampled_pos = tf.reduce_sum(
- input_tensor=tf.cast(valid_positive_index, tf.int32))
- max_num_positive_samples = tf.constant(
- int(sample_size * self._positive_fraction), tf.int32)
- num_positive_samples = tf.minimum(max_num_positive_samples, num_sampled_pos)
- num_negative_samples = tf.constant(sample_size,
- tf.int32) - num_positive_samples
-
- return num_positive_samples, num_negative_samples
-
- def _get_values_from_start_and_end(self, input_tensor, num_start_samples,
- num_end_samples, total_num_samples):
- """slices num_start_samples and last num_end_samples from input_tensor.
-
- Args:
- input_tensor: An int32 tensor of shape [N] to be sliced.
- num_start_samples: Number of examples to be sliced from the beginning
- of the input tensor.
- num_end_samples: Number of examples to be sliced from the end of the
- input tensor.
- total_num_samples: Sum of is num_start_samples and num_end_samples. This
- should be a scalar.
-
- Returns:
- A tensor containing the first num_start_samples and last num_end_samples
- from input_tensor.
-
- """
- input_length = tf.shape(input=input_tensor)[0]
- start_positions = tf.less(tf.range(input_length), num_start_samples)
- end_positions = tf.greater_equal(
- tf.range(input_length), input_length - num_end_samples)
- selected_positions = tf.logical_or(start_positions, end_positions)
- selected_positions = tf.cast(selected_positions, tf.float32)
- indexed_positions = tf.multiply(tf.cumsum(selected_positions),
- selected_positions)
- one_hot_selector = tf.one_hot(tf.cast(indexed_positions, tf.int32) - 1,
- total_num_samples,
- dtype=tf.float32)
- return tf.cast(tf.tensordot(tf.cast(input_tensor, tf.float32),
- one_hot_selector, axes=[0, 0]), tf.int32)
-
- def _static_subsample(self, indicator, batch_size, labels):
- """Returns subsampled minibatch.
-
- Args:
- indicator: boolean tensor of shape [N] whose True entries can be sampled.
- N should be a complie time constant.
- batch_size: desired batch size. This scalar cannot be None.
- labels: boolean tensor of shape [N] denoting positive(=True) and negative
- (=False) examples. N should be a complie time constant.
-
- Returns:
- sampled_idx_indicator: boolean tensor of shape [N], True for entries which
- are sampled. It ensures the length of output of the subsample is always
- batch_size, even when number of examples set to True in indicator is
- less than batch_size.
-
- Raises:
- ValueError: if labels and indicator are not 1D boolean tensors.
- """
- # Check if indicator and labels have a static size.
- if not indicator.shape.is_fully_defined():
- raise ValueError('indicator must be static in shape when is_static is'
- 'True')
- if not labels.shape.is_fully_defined():
- raise ValueError('labels must be static in shape when is_static is'
- 'True')
- if not isinstance(batch_size, int):
- raise ValueError('batch_size has to be an integer when is_static is'
- 'True.')
-
- input_length = tf.shape(input=indicator)[0]
-
- # Set the number of examples set True in indicator to be at least
- # batch_size.
- num_true_sampled = tf.reduce_sum(
- input_tensor=tf.cast(indicator, tf.float32))
- additional_false_sample = tf.less_equal(
- tf.cumsum(tf.cast(tf.logical_not(indicator), tf.float32)),
- batch_size - num_true_sampled)
- indicator = tf.logical_or(indicator, additional_false_sample)
-
- # Shuffle indicator and label. Need to store the permutation to restore the
- # order post sampling.
- permutation = tf.random.shuffle(tf.range(input_length))
- indicator = matmul_gather_on_zeroth_axis(
- tf.cast(indicator, tf.float32), permutation)
- labels = matmul_gather_on_zeroth_axis(
- tf.cast(labels, tf.float32), permutation)
-
- # index (starting from 1) when indicator is True, 0 when False
- indicator_idx = tf.where(
- tf.cast(indicator, tf.bool), tf.range(1, input_length + 1),
- tf.zeros(input_length, tf.int32))
-
- # Replace -1 for negative, +1 for positive labels
- signed_label = tf.where(
- tf.cast(labels, tf.bool), tf.ones(input_length, tf.int32),
- tf.scalar_mul(-1, tf.ones(input_length, tf.int32)))
- # negative of index for negative label, positive index for positive label,
- # 0 when indicator is False.
- signed_indicator_idx = tf.multiply(indicator_idx, signed_label)
- sorted_signed_indicator_idx = tf.nn.top_k(
- signed_indicator_idx, input_length, sorted=True).values
-
- [num_positive_samples,
- num_negative_samples] = self._get_num_pos_neg_samples(
- sorted_signed_indicator_idx, batch_size)
-
- sampled_idx = self._get_values_from_start_and_end(
- sorted_signed_indicator_idx, num_positive_samples,
- num_negative_samples, batch_size)
-
- # Shift the indices to start from 0 and remove any samples that are set as
- # False.
- sampled_idx = tf.abs(sampled_idx) - tf.ones(batch_size, tf.int32)
- sampled_idx = tf.multiply(
- tf.cast(tf.greater_equal(sampled_idx, tf.constant(0)), tf.int32),
- sampled_idx)
-
- sampled_idx_indicator = tf.cast(
- tf.reduce_sum(
- input_tensor=tf.one_hot(sampled_idx, depth=input_length), axis=0),
- tf.bool)
-
- # project back the order based on stored permutations
- reprojections = tf.one_hot(permutation, depth=input_length,
- dtype=tf.float32)
- return tf.cast(tf.tensordot(
- tf.cast(sampled_idx_indicator, tf.float32),
- reprojections, axes=[0, 0]), tf.bool)
-
- def subsample(self, indicator, batch_size, labels, scope=None):
- """Returns subsampled minibatch.
-
- Args:
- indicator: boolean tensor of shape [N] whose True entries can be sampled.
- batch_size: desired batch size. If None, keeps all positive samples and
- randomly selects negative samples so that the positive sample fraction
- matches self._positive_fraction. It cannot be None is is_static is True.
- labels: boolean tensor of shape [N] denoting positive(=True) and negative
- (=False) examples.
- scope: name scope.
-
- Returns:
- sampled_idx_indicator: boolean tensor of shape [N], True for entries which
- are sampled.
-
- Raises:
- ValueError: if labels and indicator are not 1D boolean tensors.
- """
- if len(indicator.get_shape().as_list()) != 1:
- raise ValueError('indicator must be 1 dimensional, got a tensor of '
- 'shape %s' % indicator.get_shape())
- if len(labels.get_shape().as_list()) != 1:
- raise ValueError('labels must be 1 dimensional, got a tensor of '
- 'shape %s' % labels.get_shape())
- if labels.dtype != tf.bool:
- raise ValueError('labels should be of type bool. Received: %s' %
- labels.dtype)
- if indicator.dtype != tf.bool:
- raise ValueError('indicator should be of type bool. Received: %s' %
- indicator.dtype)
- scope = scope or 'BalancedPositiveNegativeSampler'
- with tf.name_scope(scope):
- if self._is_static:
- return self._static_subsample(indicator, batch_size, labels)
-
- else:
- # Only sample from indicated samples
- negative_idx = tf.logical_not(labels)
- positive_idx = tf.logical_and(labels, indicator)
- negative_idx = tf.logical_and(negative_idx, indicator)
-
- # Sample positive and negative samples separately
- if batch_size is None:
- max_num_pos = tf.reduce_sum(
- input_tensor=tf.cast(positive_idx, dtype=tf.int32))
- else:
- max_num_pos = int(self._positive_fraction * batch_size)
- sampled_pos_idx = self.subsample_indicator(positive_idx, max_num_pos)
- num_sampled_pos = tf.reduce_sum(
- input_tensor=tf.cast(sampled_pos_idx, tf.int32))
- if batch_size is None:
- negative_positive_ratio = (
- 1 - self._positive_fraction) / self._positive_fraction
- max_num_neg = tf.cast(
- negative_positive_ratio *
- tf.cast(num_sampled_pos, dtype=tf.float32),
- dtype=tf.int32)
- else:
- max_num_neg = batch_size - num_sampled_pos
- sampled_neg_idx = self.subsample_indicator(negative_idx, max_num_neg)
-
- return tf.logical_or(sampled_pos_idx, sampled_neg_idx)
diff --git a/official/vision/beta/ops/spatial_transform_ops.py b/official/vision/beta/ops/spatial_transform_ops.py
deleted file mode 100644
index c2f6658df3ac4e0b0a8ff35d8a100adc20af330a..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/spatial_transform_ops.py
+++ /dev/null
@@ -1,544 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Spatial transform ops."""
-
-import tensorflow as tf
-
-_EPSILON = 1e-8
-
-
-def _feature_bilinear_interpolation(features, kernel_y, kernel_x):
- """Feature bilinear interpolation.
-
- The RoIAlign feature f can be computed by bilinear interpolation
- of four neighboring feature points f0, f1, f2, and f3.
-
- f(y, x) = [hy, ly] * [[f00, f01], * [hx, lx]^T
- [f10, f11]]
- f(y, x) = (hy*hx)f00 + (hy*lx)f01 + (ly*hx)f10 + (lx*ly)f11
- f(y, x) = w00*f00 + w01*f01 + w10*f10 + w11*f11
- kernel_y = [hy, ly]
- kernel_x = [hx, lx]
-
- Args:
- features: The features are in shape of [batch_size, num_boxes, output_size *
- 2, output_size * 2, num_filters].
- kernel_y: Tensor of size [batch_size, boxes, output_size, 2, 1].
- kernel_x: Tensor of size [batch_size, boxes, output_size, 2, 1].
-
- Returns:
- A 5-D tensor representing feature crop of shape
- [batch_size, num_boxes, output_size, output_size, num_filters].
-
- """
- features_shape = tf.shape(features)
- batch_size, num_boxes, output_size, num_filters = (
- features_shape[0], features_shape[1], features_shape[2],
- features_shape[4])
-
- output_size = output_size // 2
- kernel_y = tf.reshape(kernel_y, [batch_size, num_boxes, output_size * 2, 1])
- kernel_x = tf.reshape(kernel_x, [batch_size, num_boxes, 1, output_size * 2])
- # Use implicit broadcast to generate the interpolation kernel. The
- # multiplier `4` is for avg pooling.
- interpolation_kernel = kernel_y * kernel_x * 4
-
- # Interpolate the gathered features with computed interpolation kernels.
- features *= tf.cast(
- tf.expand_dims(interpolation_kernel, axis=-1), dtype=features.dtype)
- features = tf.reshape(
- features,
- [batch_size * num_boxes, output_size * 2, output_size * 2, num_filters])
- features = tf.nn.avg_pool(features, [1, 2, 2, 1], [1, 2, 2, 1], 'VALID')
- features = tf.reshape(
- features, [batch_size, num_boxes, output_size, output_size, num_filters])
- return features
-
-
-def _compute_grid_positions(boxes, boundaries, output_size, sample_offset):
- """Computes the grid position w.r.t. the corresponding feature map.
-
- Args:
- boxes: a 3-D tensor of shape [batch_size, num_boxes, 4] encoding the
- information of each box w.r.t. the corresponding feature map.
- boxes[:, :, 0:2] are the grid position in (y, x) (float) of the top-left
- corner of each box. boxes[:, :, 2:4] are the box sizes in (h, w) (float)
- in terms of the number of pixels of the corresponding feature map size.
- boundaries: a 3-D tensor of shape [batch_size, num_boxes, 2] representing
- the boundary (in (y, x)) of the corresponding feature map for each box.
- Any resampled grid points that go beyond the bounary will be clipped.
- output_size: a scalar indicating the output crop size.
- sample_offset: a float number in [0, 1] indicates the subpixel sample offset
- from grid point.
-
- Returns:
- kernel_y: Tensor of size [batch_size, boxes, output_size, 2, 1].
- kernel_x: Tensor of size [batch_size, boxes, output_size, 2, 1].
- box_grid_y0y1: Tensor of size [batch_size, boxes, output_size, 2]
- box_grid_x0x1: Tensor of size [batch_size, boxes, output_size, 2]
- """
- boxes_shape = tf.shape(boxes)
- batch_size, num_boxes = boxes_shape[0], boxes_shape[1]
- if batch_size is None:
- batch_size = tf.shape(boxes)[0]
- box_grid_x = []
- box_grid_y = []
- for i in range(output_size):
- box_grid_x.append(boxes[:, :, 1] +
- (i + sample_offset) * boxes[:, :, 3] / output_size)
- box_grid_y.append(boxes[:, :, 0] +
- (i + sample_offset) * boxes[:, :, 2] / output_size)
- box_grid_x = tf.stack(box_grid_x, axis=2)
- box_grid_y = tf.stack(box_grid_y, axis=2)
-
- box_grid_y0 = tf.floor(box_grid_y)
- box_grid_x0 = tf.floor(box_grid_x)
- box_grid_x0 = tf.maximum(tf.cast(0., dtype=box_grid_x0.dtype), box_grid_x0)
- box_grid_y0 = tf.maximum(tf.cast(0., dtype=box_grid_y0.dtype), box_grid_y0)
-
- box_grid_x0 = tf.minimum(box_grid_x0, tf.expand_dims(boundaries[:, :, 1], -1))
- box_grid_x1 = tf.minimum(box_grid_x0 + 1,
- tf.expand_dims(boundaries[:, :, 1], -1))
- box_grid_y0 = tf.minimum(box_grid_y0, tf.expand_dims(boundaries[:, :, 0], -1))
- box_grid_y1 = tf.minimum(box_grid_y0 + 1,
- tf.expand_dims(boundaries[:, :, 0], -1))
-
- box_gridx0x1 = tf.stack([box_grid_x0, box_grid_x1], axis=-1)
- box_gridy0y1 = tf.stack([box_grid_y0, box_grid_y1], axis=-1)
-
- # The RoIAlign feature f can be computed by bilinear interpolation of four
- # neighboring feature points f0, f1, f2, and f3.
- # f(y, x) = [hy, ly] * [[f00, f01], * [hx, lx]^T
- # [f10, f11]]
- # f(y, x) = (hy*hx)f00 + (hy*lx)f01 + (ly*hx)f10 + (lx*ly)f11
- # f(y, x) = w00*f00 + w01*f01 + w10*f10 + w11*f11
- ly = box_grid_y - box_grid_y0
- lx = box_grid_x - box_grid_x0
- hy = 1.0 - ly
- hx = 1.0 - lx
- kernel_y = tf.reshape(
- tf.stack([hy, ly], axis=3), [batch_size, num_boxes, output_size, 2, 1])
- kernel_x = tf.reshape(
- tf.stack([hx, lx], axis=3), [batch_size, num_boxes, output_size, 2, 1])
- return kernel_y, kernel_x, box_gridy0y1, box_gridx0x1
-
-
-def multilevel_crop_and_resize(features,
- boxes,
- output_size=7,
- sample_offset=0.5):
- """Crop and resize on multilevel feature pyramid.
-
- Generate the (output_size, output_size) set of pixels for each input box
- by first locating the box into the correct feature level, and then cropping
- and resizing it using the correspoding feature map of that level.
-
- Args:
- features: A dictionary with key as pyramid level and value as features. The
- features are in shape of [batch_size, height_l, width_l, num_filters].
- boxes: A 3-D Tensor of shape [batch_size, num_boxes, 4]. Each row represents
- a box with [y1, x1, y2, x2] in un-normalized coordinates.
- output_size: A scalar to indicate the output crop size.
- sample_offset: a float number in [0, 1] indicates the subpixel sample offset
- from grid point.
-
- Returns:
- A 5-D tensor representing feature crop of shape
- [batch_size, num_boxes, output_size, output_size, num_filters].
- """
-
- with tf.name_scope('multilevel_crop_and_resize'):
- levels = list(features.keys())
- min_level = int(min(levels))
- max_level = int(max(levels))
- features_shape = tf.shape(features[str(min_level)])
- batch_size, max_feature_height, max_feature_width, num_filters = (
- features_shape[0], features_shape[1], features_shape[2],
- features_shape[3])
-
- num_boxes = tf.shape(boxes)[1]
-
- # Stack feature pyramid into a features_all of shape
- # [batch_size, levels, height, width, num_filters].
- features_all = []
- feature_heights = []
- feature_widths = []
- for level in range(min_level, max_level + 1):
- shape = features[str(level)].get_shape().as_list()
- feature_heights.append(shape[1])
- feature_widths.append(shape[2])
- # Concat tensor of [batch_size, height_l * width_l, num_filters] for each
- # levels.
- features_all.append(
- tf.reshape(features[str(level)], [batch_size, -1, num_filters]))
- features_r2 = tf.reshape(tf.concat(features_all, 1), [-1, num_filters])
-
- # Calculate height_l * width_l for each level.
- level_dim_sizes = [
- feature_widths[i] * feature_heights[i]
- for i in range(len(feature_widths))
- ]
- # level_dim_offsets is accumulated sum of level_dim_size.
- level_dim_offsets = [0]
- for i in range(len(feature_widths) - 1):
- level_dim_offsets.append(level_dim_offsets[i] + level_dim_sizes[i])
- batch_dim_size = level_dim_offsets[-1] + level_dim_sizes[-1]
- level_dim_offsets = tf.constant(level_dim_offsets, tf.int32)
- height_dim_sizes = tf.constant(feature_widths, tf.int32)
-
- # Assigns boxes to the right level.
- box_width = boxes[:, :, 3] - boxes[:, :, 1]
- box_height = boxes[:, :, 2] - boxes[:, :, 0]
- areas_sqrt = tf.sqrt(
- tf.cast(box_height, tf.float32) * tf.cast(box_width, tf.float32))
-
- levels = tf.cast(
- tf.math.floordiv(
- tf.math.log(tf.math.divide_no_nan(areas_sqrt, 224.0)),
- tf.math.log(2.0)) + 4.0,
- dtype=tf.int32)
- # Maps levels between [min_level, max_level].
- levels = tf.minimum(max_level, tf.maximum(levels, min_level))
-
- # Projects box location and sizes to corresponding feature levels.
- scale_to_level = tf.cast(
- tf.pow(tf.constant(2.0), tf.cast(levels, tf.float32)),
- dtype=boxes.dtype)
- boxes /= tf.expand_dims(scale_to_level, axis=2)
- box_width /= scale_to_level
- box_height /= scale_to_level
- boxes = tf.concat([boxes[:, :, 0:2],
- tf.expand_dims(box_height, -1),
- tf.expand_dims(box_width, -1)], axis=-1)
-
- # Maps levels to [0, max_level-min_level].
- levels -= min_level
- level_strides = tf.pow([[2.0]], tf.cast(levels, tf.float32))
- boundary = tf.cast(
- tf.concat([
- tf.expand_dims(
- [[tf.cast(max_feature_height, tf.float32)]] / level_strides - 1,
- axis=-1),
- tf.expand_dims(
- [[tf.cast(max_feature_width, tf.float32)]] / level_strides - 1,
- axis=-1),
- ],
- axis=-1), boxes.dtype)
-
- # Compute grid positions.
- kernel_y, kernel_x, box_gridy0y1, box_gridx0x1 = _compute_grid_positions(
- boxes, boundary, output_size, sample_offset)
-
- x_indices = tf.cast(
- tf.reshape(box_gridx0x1, [batch_size, num_boxes, output_size * 2]),
- dtype=tf.int32)
- y_indices = tf.cast(
- tf.reshape(box_gridy0y1, [batch_size, num_boxes, output_size * 2]),
- dtype=tf.int32)
-
- batch_size_offset = tf.tile(
- tf.reshape(
- tf.range(batch_size) * batch_dim_size, [batch_size, 1, 1, 1]),
- [1, num_boxes, output_size * 2, output_size * 2])
- # Get level offset for each box. Each box belongs to one level.
- levels_offset = tf.tile(
- tf.reshape(
- tf.gather(level_dim_offsets, levels),
- [batch_size, num_boxes, 1, 1]),
- [1, 1, output_size * 2, output_size * 2])
- y_indices_offset = tf.tile(
- tf.reshape(
- y_indices * tf.expand_dims(tf.gather(height_dim_sizes, levels), -1),
- [batch_size, num_boxes, output_size * 2, 1]),
- [1, 1, 1, output_size * 2])
- x_indices_offset = tf.tile(
- tf.reshape(x_indices, [batch_size, num_boxes, 1, output_size * 2]),
- [1, 1, output_size * 2, 1])
- indices = tf.reshape(
- batch_size_offset + levels_offset + y_indices_offset + x_indices_offset,
- [-1])
-
- # TODO(wangtao): replace tf.gather with tf.gather_nd and try to get similar
- # performance.
- features_per_box = tf.reshape(
- tf.gather(features_r2, indices),
- [batch_size, num_boxes, output_size * 2, output_size * 2, num_filters])
-
- # Bilinear interpolation.
- features_per_box = _feature_bilinear_interpolation(
- features_per_box, kernel_y, kernel_x)
- return features_per_box
-
-
-def _selective_crop_and_resize(features,
- boxes,
- box_levels,
- boundaries,
- output_size=7,
- sample_offset=0.5,
- use_einsum_gather=False):
- """Crop and resize boxes on a set of feature maps.
-
- Given multiple features maps indexed by different levels, and a set of boxes
- where each box is mapped to a certain level, it selectively crops and resizes
- boxes from the corresponding feature maps to generate the box features.
-
- We follow the ROIAlign technique (see https://arxiv.org/pdf/1703.06870.pdf,
- figure 3 for reference). Specifically, for each feature map, we select an
- (output_size, output_size) set of pixels corresponding to the box location,
- and then use bilinear interpolation to select the feature value for each
- pixel.
-
- For performance, we perform the gather and interpolation on all layers as a
- single operation. In this op the multi-level features are first stacked and
- gathered into [2*output_size, 2*output_size] feature points. Then bilinear
- interpolation is performed on the gathered feature points to generate
- [output_size, output_size] RoIAlign feature map.
-
- Here is the step-by-step algorithm:
- 1. The multi-level features are gathered into a
- [batch_size, num_boxes, output_size*2, output_size*2, num_filters]
- Tensor. The Tensor contains four neighboring feature points for each
- vertex in the output grid.
- 2. Compute the interpolation kernel of shape
- [batch_size, num_boxes, output_size*2, output_size*2]. The last 2 axis
- can be seen as stacking 2x2 interpolation kernels for all vertices in the
- output grid.
- 3. Element-wise multiply the gathered features and interpolation kernel.
- Then apply 2x2 average pooling to reduce spatial dimension to
- output_size.
-
- Args:
- features: a 5-D tensor of shape [batch_size, num_levels, max_height,
- max_width, num_filters] where cropping and resizing are based.
- boxes: a 3-D tensor of shape [batch_size, num_boxes, 4] encoding the
- information of each box w.r.t. the corresponding feature map.
- boxes[:, :, 0:2] are the grid position in (y, x) (float) of the top-left
- corner of each box. boxes[:, :, 2:4] are the box sizes in (h, w) (float)
- in terms of the number of pixels of the corresponding feature map size.
- box_levels: a 3-D tensor of shape [batch_size, num_boxes, 1] representing
- the 0-based corresponding feature level index of each box.
- boundaries: a 3-D tensor of shape [batch_size, num_boxes, 2] representing
- the boundary (in (y, x)) of the corresponding feature map for each box.
- Any resampled grid points that go beyond the bounary will be clipped.
- output_size: a scalar indicating the output crop size.
- sample_offset: a float number in [0, 1] indicates the subpixel sample offset
- from grid point.
- use_einsum_gather: use einsum to replace gather or not. Replacing einsum
- with gather can improve performance when feature size is not large, einsum
- is friendly with model partition as well. Gather's performance is better
- when feature size is very large and there are multiple box levels.
-
- Returns:
- features_per_box: a 5-D tensor of shape
- [batch_size, num_boxes, output_size, output_size, num_filters]
- representing the cropped features.
- """
- (batch_size, num_levels, max_feature_height, max_feature_width,
- num_filters) = features.get_shape().as_list()
- if batch_size is None:
- batch_size = tf.shape(features)[0]
- _, num_boxes, _ = boxes.get_shape().as_list()
-
- kernel_y, kernel_x, box_gridy0y1, box_gridx0x1 = _compute_grid_positions(
- boxes, boundaries, output_size, sample_offset)
- x_indices = tf.cast(
- tf.reshape(box_gridx0x1, [batch_size, num_boxes, output_size * 2]),
- dtype=tf.int32)
- y_indices = tf.cast(
- tf.reshape(box_gridy0y1, [batch_size, num_boxes, output_size * 2]),
- dtype=tf.int32)
-
- if use_einsum_gather:
- # Blinear interpolation is done during the last two gathers:
- # f(y, x) = [hy, ly] * [[f00, f01], * [hx, lx]^T
- # [f10, f11]]
- # [[f00, f01],
- # [f10, f11]] = tf.einsum(tf.einsum(features, y_one_hot), x_one_hot)
- # where [hy, ly] and [hx, lx] are the bilinear interpolation kernel.
- y_indices = tf.cast(
- tf.reshape(box_gridy0y1, [batch_size, num_boxes, output_size, 2]),
- dtype=tf.int32)
- x_indices = tf.cast(
- tf.reshape(box_gridx0x1, [batch_size, num_boxes, output_size, 2]),
- dtype=tf.int32)
-
- # shape is [batch_size, num_boxes, output_size, 2, height]
- grid_y_one_hot = tf.one_hot(
- tf.cast(y_indices, tf.int32), max_feature_height, dtype=kernel_y.dtype)
- # shape is [batch_size, num_boxes, output_size, 2, width]
- grid_x_one_hot = tf.one_hot(
- tf.cast(x_indices, tf.int32), max_feature_width, dtype=kernel_x.dtype)
-
- # shape is [batch_size, num_boxes, output_size, height]
- grid_y_weight = tf.reduce_sum(
- tf.multiply(grid_y_one_hot, kernel_y), axis=-2)
- # shape is [batch_size, num_boxes, output_size, width]
- grid_x_weight = tf.reduce_sum(
- tf.multiply(grid_x_one_hot, kernel_x), axis=-2)
-
- # Gather for y_axis.
- # shape is [batch_size, num_boxes, output_size, width, features]
- features_per_box = tf.einsum('bmhwf,bmoh->bmowf', features,
- tf.cast(grid_y_weight, features.dtype))
- # Gather for x_axis.
- # shape is [batch_size, num_boxes, output_size, output_size, features]
- features_per_box = tf.einsum('bmhwf,bmow->bmhof', features_per_box,
- tf.cast(grid_x_weight, features.dtype))
- else:
- height_dim_offset = max_feature_width
- level_dim_offset = max_feature_height * height_dim_offset
- batch_dim_offset = num_levels * level_dim_offset
-
- batch_size_offset = tf.tile(
- tf.reshape(
- tf.range(batch_size) * batch_dim_offset, [batch_size, 1, 1, 1]),
- [1, num_boxes, output_size * 2, output_size * 2])
- box_levels_offset = tf.tile(
- tf.reshape(box_levels * level_dim_offset,
- [batch_size, num_boxes, 1, 1]),
- [1, 1, output_size * 2, output_size * 2])
- y_indices_offset = tf.tile(
- tf.reshape(y_indices * height_dim_offset,
- [batch_size, num_boxes, output_size * 2, 1]),
- [1, 1, 1, output_size * 2])
- x_indices_offset = tf.tile(
- tf.reshape(x_indices, [batch_size, num_boxes, 1, output_size * 2]),
- [1, 1, output_size * 2, 1])
-
- indices = tf.reshape(
- batch_size_offset + box_levels_offset + y_indices_offset +
- x_indices_offset, [-1])
-
- features = tf.reshape(features, [-1, num_filters])
- # TODO(wangtao): replace tf.gather with tf.gather_nd and try to get similar
- # performance.
- features_per_box = tf.reshape(
- tf.gather(features, indices),
- [batch_size, num_boxes, output_size * 2, output_size * 2, num_filters])
- features_per_box = _feature_bilinear_interpolation(
- features_per_box, kernel_y, kernel_x)
-
- return features_per_box
-
-
-def crop_mask_in_target_box(masks,
- boxes,
- target_boxes,
- output_size,
- sample_offset=0,
- use_einsum=True):
- """Crop masks in target boxes.
-
- Args:
- masks: A tensor with a shape of [batch_size, num_masks, height, width].
- boxes: a float tensor representing box cooridnates that tightly enclose
- masks with a shape of [batch_size, num_masks, 4] in un-normalized
- coordinates. A box is represented by [ymin, xmin, ymax, xmax].
- target_boxes: a float tensor representing target box cooridnates for masks
- with a shape of [batch_size, num_masks, 4] in un-normalized coordinates. A
- box is represented by [ymin, xmin, ymax, xmax].
- output_size: A scalar to indicate the output crop size. It currently only
- supports to output a square shape outputs.
- sample_offset: a float number in [0, 1] indicates the subpixel sample offset
- from grid point.
- use_einsum: Use einsum to replace gather in selective_crop_and_resize.
-
- Returns:
- A 4-D tensor representing feature crop of shape
- [batch_size, num_boxes, output_size, output_size].
- """
- with tf.name_scope('crop_mask_in_target_box'):
- # Cast to float32, as the y_transform and other transform variables may
- # overflow in float16
- masks = tf.cast(masks, tf.float32)
- boxes = tf.cast(boxes, tf.float32)
- target_boxes = tf.cast(target_boxes, tf.float32)
-
- batch_size, num_masks, height, width = masks.get_shape().as_list()
- if batch_size is None:
- batch_size = tf.shape(masks)[0]
- masks = tf.reshape(masks, [batch_size * num_masks, height, width, 1])
- # Pad zeros on the boundary of masks.
- masks = tf.image.pad_to_bounding_box(masks, 2, 2, height + 4, width + 4)
- masks = tf.reshape(masks, [batch_size, num_masks, height+4, width+4, 1])
-
- # Projects target box locations and sizes to corresponding cropped
- # mask coordinates.
- gt_y_min, gt_x_min, gt_y_max, gt_x_max = tf.split(
- value=boxes, num_or_size_splits=4, axis=2)
- bb_y_min, bb_x_min, bb_y_max, bb_x_max = tf.split(
- value=target_boxes, num_or_size_splits=4, axis=2)
- y_transform = (bb_y_min - gt_y_min) * height / (
- gt_y_max - gt_y_min + _EPSILON) + 2
- x_transform = (bb_x_min - gt_x_min) * height / (
- gt_x_max - gt_x_min + _EPSILON) + 2
- h_transform = (bb_y_max - bb_y_min) * width / (
- gt_y_max - gt_y_min + _EPSILON)
- w_transform = (bb_x_max - bb_x_min) * width / (
- gt_x_max - gt_x_min + _EPSILON)
-
- boundaries = tf.concat(
- [tf.ones_like(y_transform) * ((height + 4) - 1),
- tf.ones_like(x_transform) * ((width + 4) - 1)],
- axis=-1)
- boundaries = tf.cast(boundaries, dtype=y_transform.dtype)
-
- # Reshape tensors to have the right shape for selective_crop_and_resize.
- trasnformed_boxes = tf.concat(
- [y_transform, x_transform, h_transform, w_transform], -1)
- levels = tf.tile(tf.reshape(tf.range(num_masks), [1, num_masks]),
- [batch_size, 1])
-
- cropped_masks = _selective_crop_and_resize(
- masks,
- trasnformed_boxes,
- levels,
- boundaries,
- output_size,
- sample_offset=sample_offset,
- use_einsum_gather=use_einsum)
- cropped_masks = tf.squeeze(cropped_masks, axis=-1)
-
- return cropped_masks
-
-
-def nearest_upsampling(data, scale, use_keras_layer=False):
- """Nearest neighbor upsampling implementation.
-
- Args:
- data: A tensor with a shape of [batch, height_in, width_in, channels].
- scale: An integer multiple to scale resolution of input data.
- use_keras_layer: If True, use keras Upsampling2D layer.
-
- Returns:
- data_up: A tensor with a shape of
- [batch, height_in*scale, width_in*scale, channels]. Same dtype as input
- data.
- """
- if use_keras_layer:
- return tf.keras.layers.UpSampling2D(size=(scale, scale),
- interpolation='nearest')(data)
- with tf.name_scope('nearest_upsampling'):
- bs, _, _, c = data.get_shape().as_list()
- shape = tf.shape(input=data)
- h = shape[1]
- w = shape[2]
- bs = -1 if bs is None else bs
- # Uses reshape to quickly upsample the input. The nearest pixel is selected
- # via tiling.
- data = tf.tile(
- tf.reshape(data, [bs, h, 1, w, 1, c]), [1, 1, scale, 1, scale, 1])
- return tf.reshape(data, [bs, h * scale, w * scale, c])
diff --git a/official/vision/beta/ops/target_gather.py b/official/vision/beta/ops/target_gather.py
deleted file mode 100644
index 3c8c3a0a417b2afe2a0b1b87be560f233dfba74d..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/target_gather.py
+++ /dev/null
@@ -1,103 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Definition of target gather, which gathers targets from indices."""
-
-import tensorflow as tf
-
-
-class TargetGather:
- """Targer gather for dense object detector."""
-
- def __call__(self, labels, match_indices, mask=None, mask_val=0.0):
- """Labels anchors with ground truth inputs.
-
- B: batch_size
- N: number of groundtruth boxes.
-
- Args:
- labels: An integer tensor with shape [N, dims] or [B, N, ...] representing
- groundtruth labels.
- match_indices: An integer tensor with shape [M] or [B, M] representing
- match label index.
- mask: An boolean tensor with shape [M, dims] or [B, M,...] representing
- match labels.
- mask_val: An integer to fill in for mask.
-
- Returns:
- target: An integer Tensor with shape [M] or [B, M]
- Raises:
- ValueError: If `labels` is higher than rank 3.
- """
- if len(labels.shape) <= 2:
- return self._gather_unbatched(labels, match_indices, mask, mask_val)
- elif len(labels.shape) == 3:
- return self._gather_batched(labels, match_indices, mask, mask_val)
- else:
- raise ValueError("`TargetGather` does not support `labels` with rank "
- "larger than 3, got {}".format(len(labels.shape)))
-
- def _gather_unbatched(self, labels, match_indices, mask, mask_val):
- """Gather based on unbatched labels and boxes."""
- num_gt_boxes = tf.shape(labels)[0]
-
- def _assign_when_rows_empty():
- if len(labels.shape) > 1:
- mask_shape = [match_indices.shape[0], labels.shape[-1]]
- else:
- mask_shape = [match_indices.shape[0]]
- return tf.cast(mask_val, labels.dtype) * tf.ones(
- mask_shape, dtype=labels.dtype)
-
- def _assign_when_rows_not_empty():
- targets = tf.gather(labels, match_indices)
- if mask is None:
- return targets
- else:
- masked_targets = tf.cast(mask_val, labels.dtype) * tf.ones_like(
- mask, dtype=labels.dtype)
- return tf.where(mask, masked_targets, targets)
-
- return tf.cond(tf.greater(num_gt_boxes, 0),
- _assign_when_rows_not_empty,
- _assign_when_rows_empty)
-
- def _gather_batched(self, labels, match_indices, mask, mask_val):
- """Gather based on batched labels."""
- batch_size = labels.shape[0]
- if batch_size == 1:
- if mask is not None:
- result = self._gather_unbatched(
- tf.squeeze(labels, axis=0), tf.squeeze(match_indices, axis=0),
- tf.squeeze(mask, axis=0), mask_val)
- else:
- result = self._gather_unbatched(
- tf.squeeze(labels, axis=0), tf.squeeze(match_indices, axis=0),
- None, mask_val)
- return tf.expand_dims(result, axis=0)
- else:
- indices_shape = tf.shape(match_indices)
- indices_dtype = match_indices.dtype
- batch_indices = (tf.expand_dims(
- tf.range(indices_shape[0], dtype=indices_dtype), axis=-1) *
- tf.ones([1, indices_shape[-1]], dtype=indices_dtype))
- gather_nd_indices = tf.stack(
- [batch_indices, match_indices], axis=-1)
- targets = tf.gather_nd(labels, gather_nd_indices)
- if mask is None:
- return targets
- else:
- masked_targets = tf.cast(mask_val, labels.dtype) * tf.ones_like(
- mask, dtype=labels.dtype)
- return tf.where(mask, masked_targets, targets)
diff --git a/official/vision/beta/ops/target_gather_test.py b/official/vision/beta/ops/target_gather_test.py
deleted file mode 100644
index 962a31d881fc4047d4862f71848ae5754eb1c5ee..0000000000000000000000000000000000000000
--- a/official/vision/beta/ops/target_gather_test.py
+++ /dev/null
@@ -1,77 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for target_gather.py."""
-
-import tensorflow as tf
-
-from official.vision.beta.ops import target_gather
-
-
-class TargetGatherTest(tf.test.TestCase):
-
- def test_target_gather_batched(self):
- gt_boxes = tf.constant(
- [[
- [0, 0, 5, 5],
- [0, 5, 5, 10],
- [5, 0, 10, 5],
- [5, 5, 10, 10],
- ]],
- dtype=tf.float32)
- gt_classes = tf.constant([[[2], [10], [3], [-1]]], dtype=tf.int32)
-
- labeler = target_gather.TargetGather()
-
- match_indices = tf.constant([[0, 2]], dtype=tf.int32)
- match_indicators = tf.constant([[-2, 1]])
- mask = tf.less_equal(match_indicators, 0)
- cls_mask = tf.expand_dims(mask, -1)
- matched_gt_classes = labeler(gt_classes, match_indices, cls_mask)
- box_mask = tf.tile(cls_mask, [1, 1, 4])
- matched_gt_boxes = labeler(gt_boxes, match_indices, box_mask)
-
- self.assertAllEqual(
- matched_gt_classes.numpy(), [[[0], [3]]])
- self.assertAllClose(
- matched_gt_boxes.numpy(), [[[0, 0, 0, 0], [5, 0, 10, 5]]])
-
- def test_target_gather_unbatched(self):
- gt_boxes = tf.constant(
- [
- [0, 0, 5, 5],
- [0, 5, 5, 10],
- [5, 0, 10, 5],
- [5, 5, 10, 10],
- ],
- dtype=tf.float32)
- gt_classes = tf.constant([[2], [10], [3], [-1]], dtype=tf.int32)
-
- labeler = target_gather.TargetGather()
-
- match_indices = tf.constant([0, 2], dtype=tf.int32)
- match_indicators = tf.constant([-2, 1])
- mask = tf.less_equal(match_indicators, 0)
- cls_mask = tf.expand_dims(mask, -1)
- matched_gt_classes = labeler(gt_classes, match_indices, cls_mask)
- box_mask = tf.tile(cls_mask, [1, 4])
- matched_gt_boxes = labeler(gt_boxes, match_indices, box_mask)
-
- self.assertAllEqual(
- matched_gt_classes.numpy(), [[0], [3]])
- self.assertAllClose(
- matched_gt_boxes.numpy(), [[0, 0, 0, 0], [5, 0, 10, 5]])
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/projects/centernet/common/registry_imports.py b/official/vision/beta/projects/centernet/common/registry_imports.py
index d70231f264c3107b0085d4cf59f3137ad5c8004f..0d3b946fd45260c313185c5e7ee9f54b46a79fbc 100644
--- a/official/vision/beta/projects/centernet/common/registry_imports.py
+++ b/official/vision/beta/projects/centernet/common/registry_imports.py
@@ -15,7 +15,7 @@
"""All necessary imports for registration."""
# pylint: disable=unused-import
-from official.common import registry_imports
+from official.vision import registry_imports
from official.vision.beta.projects.centernet.configs import centernet
from official.vision.beta.projects.centernet.modeling import centernet_model
from official.vision.beta.projects.centernet.modeling.backbones import hourglass
diff --git a/official/vision/beta/projects/video_ssl/README.md b/official/vision/beta/projects/video_ssl/README.md
deleted file mode 100644
index 92626164955c6e28b594b8239b9461b8f9012f73..0000000000000000000000000000000000000000
--- a/official/vision/beta/projects/video_ssl/README.md
+++ /dev/null
@@ -1,62 +0,0 @@
-# Spatiotemporal Contrastive Video Representation Learning
-
-[](https://arxiv.org/abs/2008.03800)
-
-This repository is the official TF2 implementation of [Spatiotemporal Contrastive Video Representation Learning](https://arxiv.org/abs/2008.03800).
-
-
- 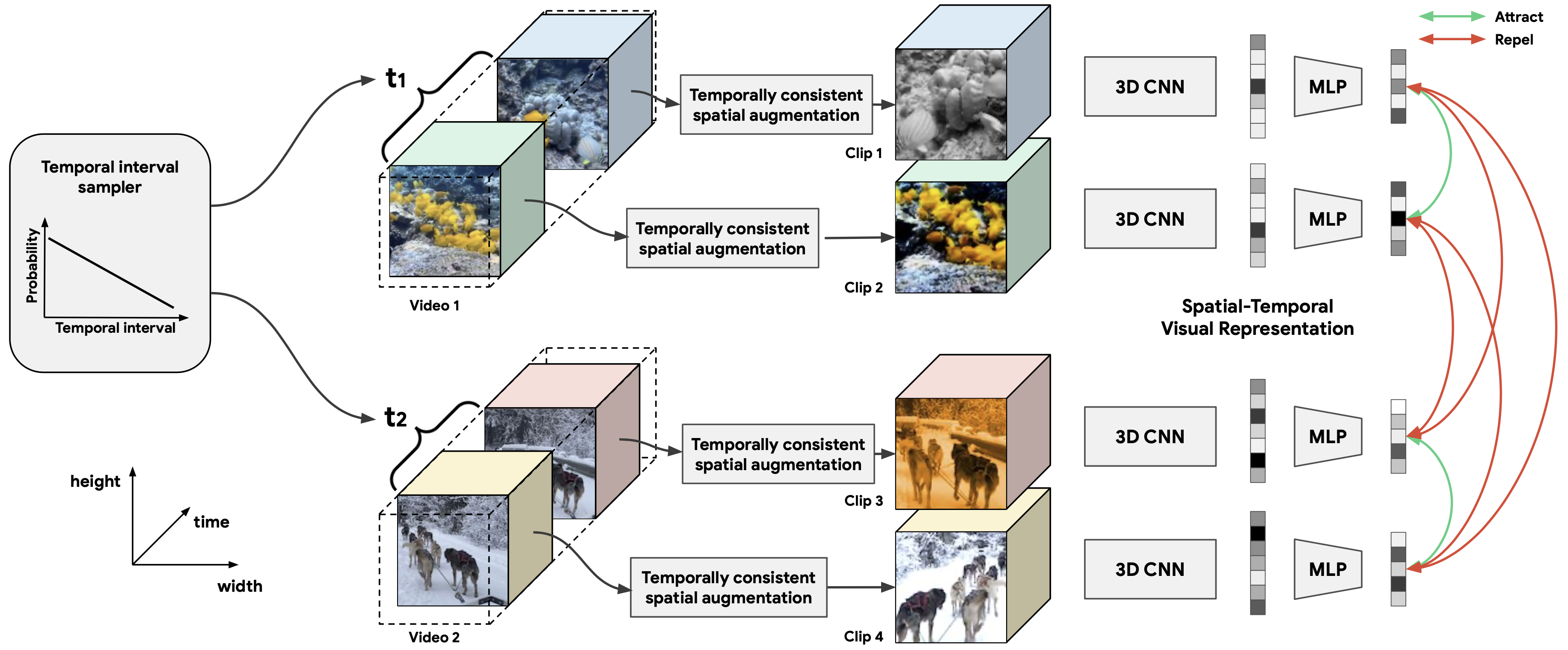 -
-
-
-## Description
-
-We present a self-supervised Contrastive Video Representation Learning (CVRL)
-method to learn spatiotemporal visual representations from unlabeled videos. Our
-representations are learned using a contrastive loss, where two augmented clips
-from the same short video are pulled together in the embedding space, while
-clips from different videos are pushed away. CVRL significantly closes the gap
-between unsupervised and supervised video representation learning.
-
-We release the code and pre-trained models.
-
-More pre-trained model checkpoints and a detailed instruction about the code
-will be updated.
-
-
-## Experimental Results
-
-### Kinetics-600 top-1 linear classification accuracy
-
-
-  -
-
-
-
-## Pre-trained Model Checkpoints
-
-We provide model checkpoints pre-trained on unlabeled RGB videos from
-Kinetics-400 and Kinetics-600. All models are trained scratch with random
-initialization.
-
-We also provide a baseline model checkpoint of "ImageNet inflated" we used in
-the paper. The model has the same architecture as 3D-ResNet-50 (R3D-50), with
-model weights inflated from a 2D ResNet-50 pre-trained on ImageNet.
-
-| Model | Parameters | Dataset | Epochs | K400 Linear Eval. | K600 Linear Eval. | Checkpoint |
-| :--------------: | :----: | :--: | :--: |:-----------: | :----------: | :----------: |
-| R3D-50 (1x) | 31.7M | ImageNet | - | 53.5% | 54.7% | [ckpt (127 MB)](https://storage.googleapis.com/tf_model_garden/vision/cvrl/imagenet.tar.gz) |
-| R3D-50 (1x) | 31.7M | Kinetics-400 | 200 | 63.8% | - | [ckpt (127 MB)](https://storage.googleapis.com/tf_model_garden/vision/cvrl/r3d_1x_k400_200ep.tar.gz) |
-| R3D-50 (1x) | 31.7M | Kinetics-400 | 800 | 66.1% | - | [ckpt (127 MB)](https://storage.googleapis.com/tf_model_garden/vision/cvrl/r3d_1x_k400_800ep.tar.gz) |
-| R3D-50 (1x) | 31.7M | Kinetics-600 | 800 | 68.5% | 70.4% | [ckpt (127 MB)](https://storage.googleapis.com/tf_model_garden/vision/cvrl/r3d_1x_k600_800ep.tar.gz) |
-
-
-## Citation
-
-```
-@inproceedings{qian2021spatiotemporal,
- title={Spatiotemporal contrastive video representation learning},
- author={Qian, Rui and Meng, Tianjian and Gong, Boqing and Yang, Ming-Hsuan and Wang, Huisheng and Belongie, Serge and Cui, Yin},
- booktitle={CVPR},
- year={2021}
-}
-```
diff --git a/official/vision/beta/projects/video_ssl/configs/__init__.py b/official/vision/beta/projects/video_ssl/configs/__init__.py
deleted file mode 100644
index c131e8b03c271b1559e6877a0404aadcf2eb804b..0000000000000000000000000000000000000000
--- a/official/vision/beta/projects/video_ssl/configs/__init__.py
+++ /dev/null
@@ -1,18 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Configs package definition."""
-
-from official.vision.beta.projects.video_ssl.configs import video_ssl
diff --git a/official/vision/beta/projects/video_ssl/configs/experiments/cvrl_linear_eval_k600.yaml b/official/vision/beta/projects/video_ssl/configs/experiments/cvrl_linear_eval_k600.yaml
deleted file mode 100644
index fc9c2121a5c3b9099c19ef14a217555012aed577..0000000000000000000000000000000000000000
--- a/official/vision/beta/projects/video_ssl/configs/experiments/cvrl_linear_eval_k600.yaml
+++ /dev/null
@@ -1,92 +0,0 @@
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- # Put the pretrained checkpoint here for linear evaluation
- init_checkpoint: 'r3d_1x_k600_800ep_backbone-1'
- init_checkpoint_modules: 'backbone'
- model:
- dropout_rate: 1.0
- norm_activation:
- use_sync_bn: false
- backbone:
- resnet_3d:
- block_specs: !!python/tuple
- - temporal_kernel_sizes: !!python/tuple
- - 1
- - 1
- - 1
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 1
- - 1
- - 1
- - 1
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 3
- - 3
- - 3
- - 3
- - 3
- - 3
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 3
- - 3
- - 3
- temporal_strides: 1
- use_self_gating: false
- model_id: 50
- stem_conv_temporal_kernel_size: 5
- stem_conv_temporal_stride: 2
- stem_pool_temporal_stride: 1
- train_data:
- name: kinetics600
- feature_shape: !!python/tuple
- - 32
- - 224
- - 224
- - 3
- temporal_stride: 2
- global_batch_size: 1024
- dtype: 'bfloat16'
- shuffle_buffer_size: 1024
- aug_max_area_ratio: 1.0
- aug_max_aspect_ratio: 2.0
- aug_min_area_ratio: 0.3
- aug_min_aspect_ratio: 0.5
- validation_data:
- name: kinetics600
- feature_shape: !!python/tuple
- - 32
- - 256
- - 256
- - 3
- temporal_stride: 2
- num_test_clips: 10
- num_test_crops: 3
- global_batch_size: 64
- dtype: 'bfloat16'
- drop_remainder: false
- losses:
- l2_weight_decay: 0.0
-trainer:
- optimizer_config:
- learning_rate:
- cosine:
- initial_learning_rate: 32.0
- decay_steps: 35744
- optimizer:
- sgd:
- nesterov: false
- warmup:
- linear:
- warmup_steps: 1787
- train_steps: 35744
- steps_per_loop: 100
- summary_interval: 100
- validation_interval: 100
diff --git a/official/vision/beta/projects/video_ssl/configs/experiments/cvrl_pretrain_k600_200ep.yaml b/official/vision/beta/projects/video_ssl/configs/experiments/cvrl_pretrain_k600_200ep.yaml
deleted file mode 100644
index 316d02fbbae73c40324d7e95cabf33468a380ccc..0000000000000000000000000000000000000000
--- a/official/vision/beta/projects/video_ssl/configs/experiments/cvrl_pretrain_k600_200ep.yaml
+++ /dev/null
@@ -1,73 +0,0 @@
-runtime:
- distribution_strategy: 'tpu'
- mixed_precision_dtype: 'bfloat16'
-task:
- model:
- dropout_rate: 1.0
- norm_activation:
- use_sync_bn: true
- hidden_norm_activation:
- use_sync_bn: true
- backbone:
- resnet_3d:
- block_specs: !!python/tuple
- - temporal_kernel_sizes: !!python/tuple
- - 1
- - 1
- - 1
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 1
- - 1
- - 1
- - 1
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 3
- - 3
- - 3
- - 3
- - 3
- - 3
- temporal_strides: 1
- use_self_gating: false
- - temporal_kernel_sizes: !!python/tuple
- - 3
- - 3
- - 3
- temporal_strides: 1
- use_self_gating: false
- model_id: 50
- stem_conv_temporal_kernel_size: 5
- stem_conv_temporal_stride: 2
- stem_pool_temporal_stride: 1
- train_data:
- name: kinetics600
- feature_shape: !!python/tuple
- - 16
- - 224
- - 224
- - 3
- temporal_stride: 2
- global_batch_size: 1024
- dtype: 'bfloat16'
- shuffle_buffer_size: 1024
- losses:
- l2_weight_decay: 0.000001
-trainer:
- optimizer_config:
- learning_rate:
- cosine:
- initial_learning_rate: 0.32
- decay_steps: 71488
- optimizer:
- sgd:
- nesterov: false
- warmup:
- linear:
- warmup_steps: 1787
- train_steps: 71488
- steps_per_loop: 100
- summary_interval: 100
diff --git a/official/vision/beta/projects/video_ssl/configs/video_ssl.py b/official/vision/beta/projects/video_ssl/configs/video_ssl.py
deleted file mode 100644
index 8f2de0d7521a2d952b2d9f1f3cbf1e5503b732c6..0000000000000000000000000000000000000000
--- a/official/vision/beta/projects/video_ssl/configs/video_ssl.py
+++ /dev/null
@@ -1,138 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Video classification configuration definition."""
-
-
-import dataclasses
-
-from official.core import config_definitions as cfg
-from official.core import exp_factory
-from official.vision.beta.configs import common
-from official.vision.beta.configs import video_classification
-
-
-Losses = video_classification.Losses
-VideoClassificationModel = video_classification.VideoClassificationModel
-VideoClassificationTask = video_classification.VideoClassificationTask
-
-
-@dataclasses.dataclass
-class VideoSSLPretrainTask(VideoClassificationTask):
- pass
-
-
-@dataclasses.dataclass
-class VideoSSLEvalTask(VideoClassificationTask):
- pass
-
-
-@dataclasses.dataclass
-class DataConfig(video_classification.DataConfig):
- """The base configuration for building datasets."""
- is_ssl: bool = False
-
-
-@dataclasses.dataclass
-class VideoSSLModel(VideoClassificationModel):
- """The model config."""
- normalize_feature: bool = False
- hidden_dim: int = 2048
- hidden_layer_num: int = 3
- projection_dim: int = 128
- hidden_norm_activation: common.NormActivation = common.NormActivation(
- use_sync_bn=False, norm_momentum=0.997, norm_epsilon=1.0e-05)
-
-
-@dataclasses.dataclass
-class SSLLosses(Losses):
- normalize_hidden: bool = True
- temperature: float = 0.1
-
-
-@exp_factory.register_config_factory('video_ssl_pretrain_kinetics400')
-def video_ssl_pretrain_kinetics400() -> cfg.ExperimentConfig:
- """Pretrain SSL Video classification on Kinectics 400 with resnet."""
- exp = video_classification.video_classification_kinetics400()
- exp.task = VideoSSLPretrainTask(**exp.task.as_dict())
- exp.task.train_data = DataConfig(is_ssl=True, **exp.task.train_data.as_dict())
- exp.task.train_data.feature_shape = (16, 224, 224, 3)
- exp.task.train_data.temporal_stride = 2
- exp.task.model = VideoSSLModel(exp.task.model)
- exp.task.model.model_type = 'video_ssl_model'
- exp.task.losses = SSLLosses(exp.task.losses)
- return exp
-
-
-@exp_factory.register_config_factory('video_ssl_linear_eval_kinetics400')
-def video_ssl_linear_eval_kinetics400() -> cfg.ExperimentConfig:
- """Pretrain SSL Video classification on Kinectics 400 with resnet."""
- exp = video_classification.video_classification_kinetics400()
- exp.task = VideoSSLEvalTask(**exp.task.as_dict())
- exp.task.train_data = DataConfig(is_ssl=False,
- **exp.task.train_data.as_dict())
- exp.task.train_data.feature_shape = (32, 224, 224, 3)
- exp.task.train_data.temporal_stride = 2
- exp.task.validation_data.feature_shape = (32, 256, 256, 3)
- exp.task.validation_data.temporal_stride = 2
- exp.task.validation_data = DataConfig(is_ssl=False,
- **exp.task.validation_data.as_dict())
- exp.task.validation_data.min_image_size = 256
- exp.task.validation_data.num_test_clips = 10
- exp.task.validation_data.num_test_crops = 3
- exp.task.model = VideoSSLModel(exp.task.model)
- exp.task.model.model_type = 'video_ssl_model'
- exp.task.model.normalize_feature = True
- exp.task.model.hidden_layer_num = 0
- exp.task.model.projection_dim = 400
- return exp
-
-
-@exp_factory.register_config_factory('video_ssl_pretrain_kinetics600')
-def video_ssl_pretrain_kinetics600() -> cfg.ExperimentConfig:
- """Pretrain SSL Video classification on Kinectics 400 with resnet."""
- exp = video_classification.video_classification_kinetics600()
- exp.task = VideoSSLPretrainTask(**exp.task.as_dict())
- exp.task.train_data = DataConfig(is_ssl=True, **exp.task.train_data.as_dict())
- exp.task.train_data.feature_shape = (16, 224, 224, 3)
- exp.task.train_data.temporal_stride = 2
- exp.task.model = VideoSSLModel(exp.task.model)
- exp.task.model.model_type = 'video_ssl_model'
- exp.task.losses = SSLLosses(exp.task.losses)
- return exp
-
-
-@exp_factory.register_config_factory('video_ssl_linear_eval_kinetics600')
-def video_ssl_linear_eval_kinetics600() -> cfg.ExperimentConfig:
- """Pretrain SSL Video classification on Kinectics 400 with resnet."""
- exp = video_classification.video_classification_kinetics600()
- exp.task = VideoSSLEvalTask(**exp.task.as_dict())
- exp.task.train_data = DataConfig(is_ssl=False,
- **exp.task.train_data.as_dict())
- exp.task.train_data.feature_shape = (32, 224, 224, 3)
- exp.task.train_data.temporal_stride = 2
- exp.task.validation_data = DataConfig(is_ssl=False,
- **exp.task.validation_data.as_dict())
- exp.task.validation_data.feature_shape = (32, 256, 256, 3)
- exp.task.validation_data.temporal_stride = 2
- exp.task.validation_data.min_image_size = 256
- exp.task.validation_data.num_test_clips = 10
- exp.task.validation_data.num_test_crops = 3
- exp.task.model = VideoSSLModel(exp.task.model)
- exp.task.model.model_type = 'video_ssl_model'
- exp.task.model.normalize_feature = True
- exp.task.model.hidden_layer_num = 0
- exp.task.model.projection_dim = 600
- return exp
diff --git a/official/vision/beta/projects/video_ssl/configs/video_ssl_test.py b/official/vision/beta/projects/video_ssl/configs/video_ssl_test.py
deleted file mode 100644
index be640f27113ecd517bde2c0023bcc50e055ec28b..0000000000000000000000000000000000000000
--- a/official/vision/beta/projects/video_ssl/configs/video_ssl_test.py
+++ /dev/null
@@ -1,56 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-
-# pylint: disable=unused-import
-from absl.testing import parameterized
-import tensorflow as tf
-
-from official.core import config_definitions as cfg
-from official.core import exp_factory
-from official.vision import beta
-from official.vision.beta.projects.video_ssl.configs import video_ssl as exp_cfg
-
-
-class VideoClassificationConfigTest(tf.test.TestCase, parameterized.TestCase):
-
- @parameterized.parameters(('video_ssl_pretrain_kinetics400',),
- ('video_ssl_pretrain_kinetics600',))
- def test_video_ssl_pretrain_configs(self, config_name):
- config = exp_factory.get_exp_config(config_name)
- self.assertIsInstance(config, cfg.ExperimentConfig)
- self.assertIsInstance(config.task, exp_cfg.VideoSSLPretrainTask)
- self.assertIsInstance(config.task.model, exp_cfg.VideoSSLModel)
- self.assertIsInstance(config.task.losses, exp_cfg.SSLLosses)
- self.assertIsInstance(config.task.train_data, exp_cfg.DataConfig)
- config.task.train_data.is_training = None
- with self.assertRaises(KeyError):
- config.validate()
-
- @parameterized.parameters(('video_ssl_linear_eval_kinetics400',),
- ('video_ssl_linear_eval_kinetics600',))
- def test_video_ssl_linear_eval_configs(self, config_name):
- config = exp_factory.get_exp_config(config_name)
- self.assertIsInstance(config, cfg.ExperimentConfig)
- self.assertIsInstance(config.task, exp_cfg.VideoSSLEvalTask)
- self.assertIsInstance(config.task.model, exp_cfg.VideoSSLModel)
- self.assertIsInstance(config.task.train_data, exp_cfg.DataConfig)
- config.task.train_data.is_training = None
- with self.assertRaises(KeyError):
- config.validate()
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/projects/video_ssl/dataloaders/video_ssl_input.py b/official/vision/beta/projects/video_ssl/dataloaders/video_ssl_input.py
deleted file mode 100644
index d4240a9a082ed4af4d20521f000735ea84be39eb..0000000000000000000000000000000000000000
--- a/official/vision/beta/projects/video_ssl/dataloaders/video_ssl_input.py
+++ /dev/null
@@ -1,321 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Parser for video and label datasets."""
-
-from typing import Dict, Optional, Tuple
-
-from absl import logging
-import tensorflow as tf
-
-from official.vision.beta.dataloaders import video_input
-from official.vision.beta.ops import preprocess_ops_3d
-from official.vision.beta.projects.video_ssl.configs import video_ssl as exp_cfg
-from official.vision.beta.projects.video_ssl.ops import video_ssl_preprocess_ops
-
-IMAGE_KEY = 'image/encoded'
-LABEL_KEY = 'clip/label/index'
-Decoder = video_input.Decoder
-
-
-def _process_image(image: tf.Tensor,
- is_training: bool = True,
- is_ssl: bool = False,
- num_frames: int = 32,
- stride: int = 1,
- num_test_clips: int = 1,
- min_resize: int = 256,
- crop_size: int = 224,
- num_crops: int = 1,
- zero_centering_image: bool = False,
- seed: Optional[int] = None) -> tf.Tensor:
- """Processes a serialized image tensor.
-
- Args:
- image: Input Tensor of shape [timesteps] and type tf.string of serialized
- frames.
- is_training: Whether or not in training mode. If True, random sample, crop
- and left right flip is used.
- is_ssl: Whether or not in self-supervised pre-training mode.
- num_frames: Number of frames per subclip.
- stride: Temporal stride to sample frames.
- num_test_clips: Number of test clips (1 by default). If more than 1, this
- will sample multiple linearly spaced clips within each video at test time.
- If 1, then a single clip in the middle of the video is sampled. The clips
- are aggreagated in the batch dimension.
- min_resize: Frames are resized so that min(height, width) is min_resize.
- crop_size: Final size of the frame after cropping the resized frames. Both
- height and width are the same.
- num_crops: Number of crops to perform on the resized frames.
- zero_centering_image: If True, frames are normalized to values in [-1, 1].
- If False, values in [0, 1].
- seed: A deterministic seed to use when sampling.
-
- Returns:
- Processed frames. Tensor of shape
- [num_frames * num_test_clips, crop_size, crop_size, 3].
- """
- # Validate parameters.
- if is_training and num_test_clips != 1:
- logging.warning(
- '`num_test_clips` %d is ignored since `is_training` is `True`.',
- num_test_clips)
-
- # Temporal sampler.
- if is_training:
- # Sampler for training.
- if is_ssl:
- # Sample two clips from linear decreasing distribution.
- image = video_ssl_preprocess_ops.sample_ssl_sequence(
- image, num_frames, True, stride)
- else:
- # Sample random clip.
- image = preprocess_ops_3d.sample_sequence(image, num_frames, True, stride)
-
- else:
- # Sampler for evaluation.
- if num_test_clips > 1:
- # Sample linspace clips.
- image = preprocess_ops_3d.sample_linspace_sequence(image, num_test_clips,
- num_frames, stride)
- else:
- # Sample middle clip.
- image = preprocess_ops_3d.sample_sequence(image, num_frames, False,
- stride)
-
- # Decode JPEG string to tf.uint8.
- image = preprocess_ops_3d.decode_jpeg(image, 3)
-
- if is_training:
- # Standard image data augmentation: random resized crop and random flip.
- if is_ssl:
- image_1, image_2 = tf.split(image, num_or_size_splits=2, axis=0)
- image_1 = preprocess_ops_3d.random_crop_resize(
- image_1, crop_size, crop_size, num_frames, 3, (0.5, 2), (0.3, 1))
- image_1 = preprocess_ops_3d.random_flip_left_right(image_1, seed)
- image_2 = preprocess_ops_3d.random_crop_resize(
- image_2, crop_size, crop_size, num_frames, 3, (0.5, 2), (0.3, 1))
- image_2 = preprocess_ops_3d.random_flip_left_right(image_2, seed)
-
- else:
- image = preprocess_ops_3d.random_crop_resize(
- image, crop_size, crop_size, num_frames, 3, (0.5, 2), (0.3, 1))
- image = preprocess_ops_3d.random_flip_left_right(image, seed)
- else:
- # Resize images (resize happens only if necessary to save compute).
- image = preprocess_ops_3d.resize_smallest(image, min_resize)
- # Three-crop of the frames.
- image = preprocess_ops_3d.crop_image(image, crop_size, crop_size, False,
- num_crops)
-
- # Cast the frames in float32, normalizing according to zero_centering_image.
- if is_training and is_ssl:
- image_1 = preprocess_ops_3d.normalize_image(image_1, zero_centering_image)
- image_2 = preprocess_ops_3d.normalize_image(image_2, zero_centering_image)
-
- else:
- image = preprocess_ops_3d.normalize_image(image, zero_centering_image)
-
- # Self-supervised pre-training augmentations.
- if is_training and is_ssl:
- # Temporally consistent color jittering.
- image_1 = video_ssl_preprocess_ops.random_color_jitter_3d(image_1)
- image_2 = video_ssl_preprocess_ops.random_color_jitter_3d(image_2)
- # Temporally consistent gaussian blurring.
- image_1 = video_ssl_preprocess_ops.random_blur(image_1, crop_size,
- crop_size, 1.0)
- image_2 = video_ssl_preprocess_ops.random_blur(image_2, crop_size,
- crop_size, 0.1)
- image_2 = video_ssl_preprocess_ops.random_solarization(image_2)
- image = tf.concat([image_1, image_2], axis=0)
- image = tf.clip_by_value(image, 0., 1.)
-
- return image
-
-
-def _postprocess_image(image: tf.Tensor,
- is_training: bool = True,
- is_ssl: bool = False,
- num_frames: int = 32,
- num_test_clips: int = 1,
- num_test_crops: int = 1) -> tf.Tensor:
- """Processes a batched Tensor of frames.
-
- The same parameters used in process should be used here.
-
- Args:
- image: Input Tensor of shape [batch, timesteps, height, width, 3].
- is_training: Whether or not in training mode. If True, random sample, crop
- and left right flip is used.
- is_ssl: Whether or not in self-supervised pre-training mode.
- num_frames: Number of frames per subclip.
- num_test_clips: Number of test clips (1 by default). If more than 1, this
- will sample multiple linearly spaced clips within each video at test time.
- If 1, then a single clip in the middle of the video is sampled. The clips
- are aggreagated in the batch dimension.
- num_test_crops: Number of test crops (1 by default). If more than 1, there
- are multiple crops for each clip at test time. If 1, there is a single
- central crop. The crops are aggreagated in the batch dimension.
-
- Returns:
- Processed frames. Tensor of shape
- [batch * num_test_clips * num_test_crops, num_frames, height, width, 3].
- """
- if is_ssl and is_training:
- # In this case, two clips of self-supervised pre-training are merged
- # together in batch dimenstion which will be 2 * batch.
- image = tf.concat(tf.split(image, num_or_size_splits=2, axis=1), axis=0)
-
- num_views = num_test_clips * num_test_crops
- if num_views > 1 and not is_training:
- # In this case, multiple views are merged together in batch dimenstion which
- # will be batch * num_views.
- image = tf.reshape(image, [-1, num_frames] + image.shape[2:].as_list())
-
- return image
-
-
-def _process_label(label: tf.Tensor,
- one_hot_label: bool = True,
- num_classes: Optional[int] = None) -> tf.Tensor:
- """Processes label Tensor."""
- # Validate parameters.
- if one_hot_label and not num_classes:
- raise ValueError(
- '`num_classes` should be given when requesting one hot label.')
-
- # Cast to tf.int32.
- label = tf.cast(label, dtype=tf.int32)
-
- if one_hot_label:
- # Replace label index by one hot representation.
- label = tf.one_hot(label, num_classes)
- if len(label.shape.as_list()) > 1:
- label = tf.reduce_sum(label, axis=0)
- if num_classes == 1:
- # The trick for single label.
- label = 1 - label
-
- return label
-
-
-class Parser(video_input.Parser):
- """Parses a video and label dataset."""
-
- def __init__(self,
- input_params: exp_cfg.DataConfig,
- image_key: str = IMAGE_KEY,
- label_key: str = LABEL_KEY):
- super(Parser, self).__init__(input_params, image_key, label_key)
- self._is_ssl = input_params.is_ssl
-
- def _parse_train_data(
- self, decoded_tensors: Dict[str, tf.Tensor]
- ) -> Tuple[Dict[str, tf.Tensor], tf.Tensor]:
- """Parses data for training."""
- # Process image and label.
- image = decoded_tensors[self._image_key]
- image = _process_image(
- image=image,
- is_training=True,
- is_ssl=self._is_ssl,
- num_frames=self._num_frames,
- stride=self._stride,
- num_test_clips=self._num_test_clips,
- min_resize=self._min_resize,
- crop_size=self._crop_size)
- image = tf.cast(image, dtype=self._dtype)
- features = {'image': image}
-
- label = decoded_tensors[self._label_key]
- label = _process_label(label, self._one_hot_label, self._num_classes)
-
- return features, label
-
- def _parse_eval_data(
- self, decoded_tensors: Dict[str, tf.Tensor]
- ) -> Tuple[Dict[str, tf.Tensor], tf.Tensor]:
- """Parses data for evaluation."""
- image = decoded_tensors[self._image_key]
- image = _process_image(
- image=image,
- is_training=False,
- num_frames=self._num_frames,
- stride=self._stride,
- num_test_clips=self._num_test_clips,
- min_resize=self._min_resize,
- crop_size=self._crop_size,
- num_crops=self._num_crops)
- image = tf.cast(image, dtype=self._dtype)
- features = {'image': image}
-
- label = decoded_tensors[self._label_key]
- label = _process_label(label, self._one_hot_label, self._num_classes)
-
- if self._output_audio:
- audio = decoded_tensors[self._audio_feature]
- audio = tf.cast(audio, dtype=self._dtype)
- audio = preprocess_ops_3d.sample_sequence(
- audio, 20, random=False, stride=1)
- audio = tf.ensure_shape(audio, [20, 2048])
- features['audio'] = audio
-
- return features, label
-
- def parse_fn(self, is_training):
- """Returns a parse fn that reads and parses raw tensors from the decoder.
-
- Args:
- is_training: a `bool` to indicate whether it is in training mode.
-
- Returns:
- parse: a `callable` that takes the serialized examle and generate the
- images, labels tuple where labels is a dict of Tensors that contains
- labels.
- """
- def parse(decoded_tensors):
- """Parses the serialized example data."""
- if is_training:
- return self._parse_train_data(decoded_tensors)
- else:
- return self._parse_eval_data(decoded_tensors)
-
- return parse
-
-
-class PostBatchProcessor(object):
- """Processes a video and label dataset which is batched."""
-
- def __init__(self, input_params: exp_cfg.DataConfig):
- self._is_training = input_params.is_training
- self._is_ssl = input_params.is_ssl
- self._num_frames = input_params.feature_shape[0]
- self._num_test_clips = input_params.num_test_clips
- self._num_test_crops = input_params.num_test_crops
-
- def __call__(self, features: Dict[str, tf.Tensor],
- label: tf.Tensor) -> Tuple[Dict[str, tf.Tensor], tf.Tensor]:
- """Parses a single tf.Example into image and label tensors."""
- for key in ['image', 'audio']:
- if key in features:
- features[key] = _postprocess_image(
- image=features[key],
- is_training=self._is_training,
- is_ssl=self._is_ssl,
- num_frames=self._num_frames,
- num_test_clips=self._num_test_clips,
- num_test_crops=self._num_test_crops)
-
- return features, label
diff --git a/official/vision/beta/projects/video_ssl/dataloaders/video_ssl_input_test.py b/official/vision/beta/projects/video_ssl/dataloaders/video_ssl_input_test.py
deleted file mode 100644
index 21e99acfaabc78c8144a797747850494d84dba6f..0000000000000000000000000000000000000000
--- a/official/vision/beta/projects/video_ssl/dataloaders/video_ssl_input_test.py
+++ /dev/null
@@ -1,111 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-
-import io
-
-# Import libraries
-import numpy as np
-from PIL import Image
-import tensorflow as tf
-
-from official.vision.beta.projects.video_ssl.configs import video_ssl as exp_cfg
-from official.vision.beta.projects.video_ssl.dataloaders import video_ssl_input
-
-AUDIO_KEY = 'features/audio'
-
-
-def fake_seq_example():
- # Create fake data.
- random_image = np.random.randint(0, 256, size=(263, 320, 3), dtype=np.uint8)
- random_image = Image.fromarray(random_image)
- label = 42
- with io.BytesIO() as buffer:
- random_image.save(buffer, format='JPEG')
- raw_image_bytes = buffer.getvalue()
-
- seq_example = tf.train.SequenceExample()
- seq_example.feature_lists.feature_list.get_or_create(
- video_ssl_input.IMAGE_KEY).feature.add().bytes_list.value[:] = [
- raw_image_bytes
- ]
- seq_example.feature_lists.feature_list.get_or_create(
- video_ssl_input.IMAGE_KEY).feature.add().bytes_list.value[:] = [
- raw_image_bytes
- ]
- seq_example.context.feature[video_ssl_input.LABEL_KEY].int64_list.value[:] = [
- label
- ]
-
- random_audio = np.random.normal(size=(10, 256)).tolist()
- for s in random_audio:
- seq_example.feature_lists.feature_list.get_or_create(
- AUDIO_KEY).feature.add().float_list.value[:] = s
- return seq_example, label
-
-
-class VideoAndLabelParserTest(tf.test.TestCase):
-
- def test_video_ssl_input_pretrain(self):
- params = exp_cfg.video_ssl_pretrain_kinetics600().task.train_data
-
- decoder = video_ssl_input.Decoder()
- parser = video_ssl_input.Parser(params).parse_fn(params.is_training)
- seq_example, _ = fake_seq_example()
-
- input_tensor = tf.constant(seq_example.SerializeToString())
- decoded_tensors = decoder.decode(input_tensor)
- output_tensor = parser(decoded_tensors)
- image_features, _ = output_tensor
- image = image_features['image']
-
- self.assertAllEqual(image.shape, (32, 224, 224, 3))
-
- def test_video_ssl_input_linear_train(self):
- params = exp_cfg.video_ssl_linear_eval_kinetics600().task.train_data
-
- decoder = video_ssl_input.Decoder()
- parser = video_ssl_input.Parser(params).parse_fn(params.is_training)
- seq_example, label = fake_seq_example()
-
- input_tensor = tf.constant(seq_example.SerializeToString())
- decoded_tensors = decoder.decode(input_tensor)
- output_tensor = parser(decoded_tensors)
- image_features, label = output_tensor
- image = image_features['image']
-
- self.assertAllEqual(image.shape, (32, 224, 224, 3))
- self.assertAllEqual(label.shape, (600,))
-
- def test_video_ssl_input_linear_eval(self):
- params = exp_cfg.video_ssl_linear_eval_kinetics600().task.validation_data
- print('!!!', params)
-
- decoder = video_ssl_input.Decoder()
- parser = video_ssl_input.Parser(params).parse_fn(params.is_training)
- seq_example, label = fake_seq_example()
-
- input_tensor = tf.constant(seq_example.SerializeToString())
- decoded_tensors = decoder.decode(input_tensor)
- output_tensor = parser(decoded_tensors)
- image_features, label = output_tensor
- image = image_features['image']
-
- self.assertAllEqual(image.shape, (960, 256, 256, 3))
- self.assertAllEqual(label.shape, (600,))
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/projects/video_ssl/losses/losses.py b/official/vision/beta/projects/video_ssl/losses/losses.py
deleted file mode 100644
index b1a54670cc8d0c1e53073f03e2ff07738c8268fd..0000000000000000000000000000000000000000
--- a/official/vision/beta/projects/video_ssl/losses/losses.py
+++ /dev/null
@@ -1,136 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Define losses."""
-
-# Import libraries
-import tensorflow as tf
-from tensorflow.compiler.tf2xla.python import xla
-
-
-def contrastive_loss(hidden,
- num_replicas,
- normalize_hidden,
- temperature,
- model,
- weight_decay):
- """Computes contrastive loss.
-
- Args:
- hidden: embedding of video clips after projection head.
- num_replicas: number of distributed replicas.
- normalize_hidden: whether or not to l2 normalize the hidden vector.
- temperature: temperature in the InfoNCE contrastive loss.
- model: keras model for calculating weight decay.
- weight_decay: weight decay parameter.
-
- Returns:
- A loss scalar.
- The logits for contrastive prediction task.
- The labels for contrastive prediction task.
- """
- large_num = 1e9
-
- hidden1, hidden2 = tf.split(hidden, num_or_size_splits=2, axis=0)
- if normalize_hidden:
- hidden1 = tf.math.l2_normalize(hidden1, -1)
- hidden2 = tf.math.l2_normalize(hidden2, -1)
- batch_size = tf.shape(hidden1)[0]
-
- if num_replicas == 1:
- # This is the local version
- hidden1_large = hidden1
- hidden2_large = hidden2
- labels = tf.one_hot(tf.range(batch_size), batch_size * 2)
- masks = tf.one_hot(tf.range(batch_size), batch_size)
-
- else:
- # This is the cross-tpu version.
- hidden1_large = tpu_cross_replica_concat(hidden1, num_replicas)
- hidden2_large = tpu_cross_replica_concat(hidden2, num_replicas)
- enlarged_batch_size = tf.shape(hidden1_large)[0]
- replica_id = tf.cast(tf.cast(xla.replica_id(), tf.uint32), tf.int32)
- labels_idx = tf.range(batch_size) + replica_id * batch_size
- labels = tf.one_hot(labels_idx, enlarged_batch_size * 2)
- masks = tf.one_hot(labels_idx, enlarged_batch_size)
-
- logits_aa = tf.matmul(hidden1, hidden1_large, transpose_b=True) / temperature
- logits_aa = logits_aa - tf.cast(masks, logits_aa.dtype) * large_num
- logits_bb = tf.matmul(hidden2, hidden2_large, transpose_b=True) / temperature
- logits_bb = logits_bb - tf.cast(masks, logits_bb.dtype) * large_num
- logits_ab = tf.matmul(hidden1, hidden2_large, transpose_b=True) / temperature
- logits_ba = tf.matmul(hidden2, hidden1_large, transpose_b=True) / temperature
-
- loss_a = tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits(
- labels, tf.concat([logits_ab, logits_aa], 1)))
- loss_b = tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits(
- labels, tf.concat([logits_ba, logits_bb], 1)))
- loss = loss_a + loss_b
-
- l2_loss = weight_decay * tf.add_n([
- tf.nn.l2_loss(v)
- for v in model.trainable_variables
- if 'kernel' in v.name
- ])
-
- total_loss = loss + tf.cast(l2_loss, loss.dtype)
-
- contrast_prob = tf.nn.softmax(logits_ab)
- contrast_entropy = - tf.reduce_mean(
- tf.reduce_sum(contrast_prob * tf.math.log(contrast_prob + 1e-8), -1))
-
- contrast_acc = tf.equal(tf.argmax(labels, 1), tf.argmax(logits_ab, axis=1))
- contrast_acc = tf.reduce_mean(tf.cast(contrast_acc, tf.float32))
-
- return {
- 'total_loss': total_loss,
- 'contrastive_loss': loss,
- 'reg_loss': l2_loss,
- 'contrast_acc': contrast_acc,
- 'contrast_entropy': contrast_entropy,
- }
-
-
-def tpu_cross_replica_concat(tensor, num_replicas):
- """Reduce a concatenation of the `tensor` across TPU cores.
-
- Args:
- tensor: tensor to concatenate.
- num_replicas: number of TPU device replicas.
-
- Returns:
- Tensor of the same rank as `tensor` with first dimension `num_replicas`
- times larger.
- """
- with tf.name_scope('tpu_cross_replica_concat'):
- # This creates a tensor that is like the input tensor but has an added
- # replica dimension as the outermost dimension. On each replica it will
- # contain the local values and zeros for all other values that need to be
- # fetched from other replicas.
- ext_tensor = tf.scatter_nd(
- indices=[[xla.replica_id()]],
- updates=[tensor],
- shape=[num_replicas] + tensor.shape.as_list())
-
- # As every value is only present on one replica and 0 in all others, adding
- # them all together will result in the full tensor on all replicas.
- replica_context = tf.distribute.get_replica_context()
- ext_tensor = replica_context.all_reduce(tf.distribute.ReduceOp.SUM,
- ext_tensor)
-
- # Flatten the replica dimension.
- # The first dimension size will be: tensor.shape[0] * num_replicas
- # Using [-1] trick to support also scalar input.
- return tf.reshape(ext_tensor, [-1] + ext_tensor.shape.as_list()[2:])
diff --git a/official/vision/beta/projects/video_ssl/modeling/video_ssl_model.py b/official/vision/beta/projects/video_ssl/modeling/video_ssl_model.py
deleted file mode 100644
index fd631c9eee5ce895d26a8914ca2dd59f0f49826f..0000000000000000000000000000000000000000
--- a/official/vision/beta/projects/video_ssl/modeling/video_ssl_model.py
+++ /dev/null
@@ -1,179 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Build video classification models."""
-from typing import Mapping, Optional
-
-# Import libraries
-
-import tensorflow as tf
-
-from official.modeling import tf_utils
-from official.vision.beta.modeling import backbones
-from official.vision.beta.modeling import factory_3d as model_factory
-from official.vision.beta.projects.video_ssl.configs import video_ssl as video_ssl_cfg
-
-layers = tf.keras.layers
-
-
-class VideoSSLModel(tf.keras.Model):
- """A video ssl model class builder."""
-
- def __init__(self,
- backbone,
- normalize_feature,
- hidden_dim,
- hidden_layer_num,
- hidden_norm_args,
- projection_dim,
- input_specs: Optional[Mapping[str,
- tf.keras.layers.InputSpec]] = None,
- dropout_rate: float = 0.0,
- aggregate_endpoints: bool = False,
- kernel_initializer='random_uniform',
- kernel_regularizer=None,
- bias_regularizer=None,
- **kwargs):
- """Video Classification initialization function.
-
- Args:
- backbone: a 3d backbone network.
- normalize_feature: whether normalize backbone feature.
- hidden_dim: `int` number of hidden units in MLP.
- hidden_layer_num: `int` number of hidden layers in MLP.
- hidden_norm_args: `dict` for batchnorm arguments in MLP.
- projection_dim: `int` number of ouput dimension for MLP.
- input_specs: `tf.keras.layers.InputSpec` specs of the input tensor.
- dropout_rate: `float` rate for dropout regularization.
- aggregate_endpoints: `bool` aggregate all end ponits or only use the
- final end point.
- kernel_initializer: kernel initializer for the dense layer.
- kernel_regularizer: tf.keras.regularizers.Regularizer object. Default to
- None.
- bias_regularizer: tf.keras.regularizers.Regularizer object. Default to
- None.
- **kwargs: keyword arguments to be passed.
- """
- if not input_specs:
- input_specs = {
- 'image': layers.InputSpec(shape=[None, None, None, None, 3])
- }
- self._self_setattr_tracking = False
- self._config_dict = {
- 'backbone': backbone,
- 'normalize_feature': normalize_feature,
- 'hidden_dim': hidden_dim,
- 'hidden_layer_num': hidden_layer_num,
- 'use_sync_bn': hidden_norm_args.use_sync_bn,
- 'norm_momentum': hidden_norm_args.norm_momentum,
- 'norm_epsilon': hidden_norm_args.norm_epsilon,
- 'activation': hidden_norm_args.activation,
- 'projection_dim': projection_dim,
- 'input_specs': input_specs,
- 'dropout_rate': dropout_rate,
- 'aggregate_endpoints': aggregate_endpoints,
- 'kernel_initializer': kernel_initializer,
- 'kernel_regularizer': kernel_regularizer,
- 'bias_regularizer': bias_regularizer,
- }
- self._input_specs = input_specs
- self._kernel_regularizer = kernel_regularizer
- self._bias_regularizer = bias_regularizer
- self._backbone = backbone
-
- inputs = {
- k: tf.keras.Input(shape=v.shape[1:]) for k, v in input_specs.items()
- }
- endpoints = backbone(inputs['image'])
-
- if aggregate_endpoints:
- pooled_feats = []
- for endpoint in endpoints.values():
- x_pool = tf.keras.layers.GlobalAveragePooling3D()(endpoint)
- pooled_feats.append(x_pool)
- x = tf.concat(pooled_feats, axis=1)
- else:
- x = endpoints[max(endpoints.keys())]
- x = tf.keras.layers.GlobalAveragePooling3D()(x)
-
- # L2 Normalize feature after backbone
- if normalize_feature:
- x = tf.nn.l2_normalize(x, axis=-1)
-
- # MLP hidden layers
- for _ in range(hidden_layer_num):
- x = tf.keras.layers.Dense(hidden_dim)(x)
- if self._config_dict['use_sync_bn']:
- x = tf.keras.layers.experimental.SyncBatchNormalization(
- momentum=self._config_dict['norm_momentum'],
- epsilon=self._config_dict['norm_epsilon'])(x)
- else:
- x = tf.keras.layers.BatchNormalization(
- momentum=self._config_dict['norm_momentum'],
- epsilon=self._config_dict['norm_epsilon'])(x)
- x = tf_utils.get_activation(self._config_dict['activation'])(x)
-
- # Projection head
- x = tf.keras.layers.Dense(projection_dim)(x)
-
- super(VideoSSLModel, self).__init__(
- inputs=inputs, outputs=x, **kwargs)
-
- @property
- def checkpoint_items(self):
- """Returns a dictionary of items to be additionally checkpointed."""
- return dict(backbone=self.backbone)
-
- @property
- def backbone(self):
- return self._backbone
-
- def get_config(self):
- return self._config_dict
-
- @classmethod
- def from_config(cls, config, custom_objects=None):
- return cls(**config)
-
-
-@model_factory.register_model_builder('video_ssl_model')
-def build_video_ssl_pretrain_model(
- input_specs: tf.keras.layers.InputSpec,
- model_config: video_ssl_cfg.VideoSSLModel,
- num_classes: int,
- l2_regularizer: Optional[tf.keras.regularizers.Regularizer] = None):
- """Builds the video classification model."""
- del num_classes
- input_specs_dict = {'image': input_specs}
- backbone = backbones.factory.build_backbone(
- input_specs=input_specs,
- backbone_config=model_config.backbone,
- norm_activation_config=model_config.norm_activation,
- l2_regularizer=l2_regularizer)
-
- # Norm layer type in the MLP head should same with backbone
- assert model_config.norm_activation.use_sync_bn == model_config.hidden_norm_activation.use_sync_bn
-
- model = VideoSSLModel(
- backbone=backbone,
- normalize_feature=model_config.normalize_feature,
- hidden_dim=model_config.hidden_dim,
- hidden_layer_num=model_config.hidden_layer_num,
- hidden_norm_args=model_config.hidden_norm_activation,
- projection_dim=model_config.projection_dim,
- input_specs=input_specs_dict,
- dropout_rate=model_config.dropout_rate,
- aggregate_endpoints=model_config.aggregate_endpoints,
- kernel_regularizer=l2_regularizer)
- return model
diff --git a/official/vision/beta/projects/video_ssl/ops/video_ssl_preprocess_ops.py b/official/vision/beta/projects/video_ssl/ops/video_ssl_preprocess_ops.py
deleted file mode 100644
index b0071c7a3d59bad378da8edebea1e2aedcbc3154..0000000000000000000000000000000000000000
--- a/official/vision/beta/projects/video_ssl/ops/video_ssl_preprocess_ops.py
+++ /dev/null
@@ -1,406 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Utils for customed ops for video ssl."""
-
-import functools
-from typing import Optional
-import tensorflow as tf
-
-
-def random_apply(func, p, x):
- """Randomly apply function func to x with probability p."""
- return tf.cond(
- tf.less(tf.random.uniform([], minval=0, maxval=1, dtype=tf.float32),
- tf.cast(p, tf.float32)),
- lambda: func(x),
- lambda: x)
-
-
-def random_brightness(image, max_delta):
- """Distort brightness of image (SimCLRv2 style)."""
- factor = tf.random.uniform(
- [], tf.maximum(1.0 - max_delta, 0), 1.0 + max_delta)
- image = image * factor
- return image
-
-
-def random_solarization(image, p=0.2):
- """Random solarize image."""
- def _transform(image):
- image = image * tf.cast(tf.less(image, 0.5), dtype=image.dtype) + (
- 1.0 - image) * tf.cast(tf.greater_equal(image, 0.5), dtype=image.dtype)
- return image
- return random_apply(_transform, p=p, x=image)
-
-
-def to_grayscale(image, keep_channels=True):
- """Turn the input image to gray scale.
-
- Args:
- image: The input image tensor.
- keep_channels: Whether maintaining the channel number for the image.
- If true, the transformed image will repeat three times in channel.
- If false, the transformed image will only have one channel.
-
- Returns:
- The distorted image tensor.
- """
- image = tf.image.rgb_to_grayscale(image)
- if keep_channels:
- image = tf.tile(image, [1, 1, 3])
- return image
-
-
-def color_jitter(image, strength, random_order=True):
- """Distorts the color of the image (SimCLRv2 style).
-
- Args:
- image: The input image tensor.
- strength: The floating number for the strength of the color augmentation.
- random_order: A bool, specifying whether to randomize the jittering order.
-
- Returns:
- The distorted image tensor.
- """
- brightness = 0.8 * strength
- contrast = 0.8 * strength
- saturation = 0.8 * strength
- hue = 0.2 * strength
- if random_order:
- return color_jitter_rand(
- image, brightness, contrast, saturation, hue)
- else:
- return color_jitter_nonrand(
- image, brightness, contrast, saturation, hue)
-
-
-def color_jitter_nonrand(image,
- brightness=0,
- contrast=0,
- saturation=0,
- hue=0):
- """Distorts the color of the image (jittering order is fixed, SimCLRv2 style).
-
- Args:
- image: The input image tensor.
- brightness: A float, specifying the brightness for color jitter.
- contrast: A float, specifying the contrast for color jitter.
- saturation: A float, specifying the saturation for color jitter.
- hue: A float, specifying the hue for color jitter.
-
- Returns:
- The distorted image tensor.
- """
- with tf.name_scope('distort_color'):
- def apply_transform(i, x, brightness, contrast, saturation, hue):
- """Apply the i-th transformation."""
- if brightness != 0 and i == 0:
- x = random_brightness(x, max_delta=brightness)
- elif contrast != 0 and i == 1:
- x = tf.image.random_contrast(
- x, lower=1-contrast, upper=1+contrast)
- elif saturation != 0 and i == 2:
- x = tf.image.random_saturation(
- x, lower=1-saturation, upper=1+saturation)
- elif hue != 0:
- x = tf.image.random_hue(x, max_delta=hue)
- return x
-
- for i in range(4):
- image = apply_transform(i, image, brightness, contrast, saturation, hue)
- image = tf.clip_by_value(image, 0., 1.)
- return image
-
-
-def color_jitter_rand(image,
- brightness=0,
- contrast=0,
- saturation=0,
- hue=0):
- """Distorts the color of the image (jittering order is random, SimCLRv2 style).
-
- Args:
- image: The input image tensor.
- brightness: A float, specifying the brightness for color jitter.
- contrast: A float, specifying the contrast for color jitter.
- saturation: A float, specifying the saturation for color jitter.
- hue: A float, specifying the hue for color jitter.
-
- Returns:
- The distorted image tensor.
- """
- with tf.name_scope('distort_color'):
- def apply_transform(i, x):
- """Apply the i-th transformation."""
- def brightness_transform():
- if brightness == 0:
- return x
- else:
- return random_brightness(x, max_delta=brightness)
- def contrast_transform():
- if contrast == 0:
- return x
- else:
- return tf.image.random_contrast(x, lower=1-contrast, upper=1+contrast)
- def saturation_transform():
- if saturation == 0:
- return x
- else:
- return tf.image.random_saturation(
- x, lower=1-saturation, upper=1+saturation)
- def hue_transform():
- if hue == 0:
- return x
- else:
- return tf.image.random_hue(x, max_delta=hue)
- # pylint:disable=g-long-lambda
- x = tf.cond(
- tf.less(i, 2), lambda: tf.cond(
- tf.less(i, 1), brightness_transform, contrast_transform),
- lambda: tf.cond(tf.less(i, 3), saturation_transform, hue_transform))
- # pylint:disable=g-long-lambda
- return x
-
- perm = tf.random.shuffle(tf.range(4))
- for i in range(4):
- image = apply_transform(perm[i], image)
- image = tf.clip_by_value(image, 0., 1.)
- return image
-
-
-def random_color_jitter_3d(frames):
- """Applies temporally consistent color jittering to one video clip.
-
- Args:
- frames: `Tensor` of shape [num_frames, height, width, channels].
-
- Returns:
- A Tensor of shape [num_frames, height, width, channels] being color jittered
- with the same operation.
- """
- def random_color_jitter(image, p=1.0):
- def _transform(image):
- color_jitter_t = functools.partial(
- color_jitter, strength=1.0)
- image = random_apply(color_jitter_t, p=0.8, x=image)
- return random_apply(to_grayscale, p=0.2, x=image)
- return random_apply(_transform, p=p, x=image)
-
- num_frames, width, height, channels = frames.shape.as_list()
- big_image = tf.reshape(frames, [num_frames*width, height, channels])
- big_image = random_color_jitter(big_image)
- return tf.reshape(big_image, [num_frames, width, height, channels])
-
-
-def gaussian_blur(image, kernel_size, sigma, padding='SAME'):
- """Blurs the given image with separable convolution.
-
- Args:
- image: Tensor of shape [height, width, channels] and dtype float to blur.
- kernel_size: Integer Tensor for the size of the blur kernel. This is should
- be an odd number. If it is an even number, the actual kernel size will be
- size + 1.
- sigma: Sigma value for gaussian operator.
- padding: Padding to use for the convolution. Typically 'SAME' or 'VALID'.
-
- Returns:
- A Tensor representing the blurred image.
- """
- radius = tf.cast(kernel_size / 2, dtype=tf.int32)
- kernel_size = radius * 2 + 1
- x = tf.cast(tf.range(-radius, radius + 1), dtype=tf.float32)
- blur_filter = tf.exp(
- -tf.pow(x, 2.0) / (2.0 * tf.pow(tf.cast(sigma, dtype=tf.float32), 2.0)))
- blur_filter /= tf.reduce_sum(blur_filter)
- # One vertical and one horizontal filter.
- blur_v = tf.reshape(blur_filter, [kernel_size, 1, 1, 1])
- blur_h = tf.reshape(blur_filter, [1, kernel_size, 1, 1])
- num_channels = tf.shape(image)[-1]
- blur_h = tf.tile(blur_h, [1, 1, num_channels, 1])
- blur_v = tf.tile(blur_v, [1, 1, num_channels, 1])
- expand_batch_dim = image.shape.ndims == 3
- if expand_batch_dim:
- # Tensorflow requires batched input to convolutions, which we can fake with
- # an extra dimension.
- image = tf.expand_dims(image, axis=0)
- blurred = tf.nn.depthwise_conv2d(
- image, blur_h, strides=[1, 1, 1, 1], padding=padding)
- blurred = tf.nn.depthwise_conv2d(
- blurred, blur_v, strides=[1, 1, 1, 1], padding=padding)
- if expand_batch_dim:
- blurred = tf.squeeze(blurred, axis=0)
- return blurred
-
-
-def random_blur(image, height, width, p=1.0):
- """Randomly blur an image.
-
- Args:
- image: `Tensor` representing an image of arbitrary size.
- height: Height of output image.
- width: Width of output image.
- p: probability of applying this transformation.
-
- Returns:
- A preprocessed image `Tensor`.
- """
- del width
- def _transform(image):
- sigma = tf.random.uniform([], 0.1, 2.0, dtype=tf.float32)
- return gaussian_blur(
- image, kernel_size=height//10, sigma=sigma, padding='SAME')
- return random_apply(_transform, p=p, x=image)
-
-
-def random_blur_3d(frames, height, width, blur_probability=0.5):
- """Apply efficient batch data transformations.
-
- Args:
- frames: `Tensor` of shape [timesteps, height, width, 3].
- height: the height of image.
- width: the width of image.
- blur_probability: the probaility to apply the blur operator.
-
- Returns:
- Preprocessed feature list.
- """
- def generate_selector(p, bsz):
- shape = [bsz, 1, 1, 1]
- selector = tf.cast(
- tf.less(tf.random.uniform(shape, 0, 1, dtype=tf.float32), p),
- tf.float32)
- return selector
-
- frames_new = random_blur(frames, height, width, p=1.)
- selector = generate_selector(blur_probability, 1)
- frames = frames_new * selector + frames * (1 - selector)
- frames = tf.clip_by_value(frames, 0., 1.)
-
- return frames
-
-
-def _sample_or_pad_sequence_indices(sequence: tf.Tensor,
- num_steps: int,
- stride: int,
- offset: tf.Tensor) -> tf.Tensor:
- """Returns indices to take for sampling or padding sequences to fixed size."""
- sequence_length = tf.shape(sequence)[0]
- sel_idx = tf.range(sequence_length)
-
- # Repeats sequence until num_steps are available in total.
- max_length = num_steps * stride + offset
- num_repeats = tf.math.floordiv(
- max_length + sequence_length - 1, sequence_length)
- sel_idx = tf.tile(sel_idx, [num_repeats])
-
- steps = tf.range(offset, offset + num_steps * stride, stride)
- return tf.gather(sel_idx, steps)
-
-
-def sample_ssl_sequence(sequence: tf.Tensor,
- num_steps: int,
- random: bool,
- stride: int = 1,
- num_windows: Optional[int] = 2) -> tf.Tensor:
- """Samples two segments of size num_steps randomly from a given sequence.
-
- Currently it only supports images, and specically designed for video self-
- supervised learning.
-
- Args:
- sequence: Any tensor where the first dimension is timesteps.
- num_steps: Number of steps (e.g. frames) to take.
- random: A boolean indicating whether to random sample the single window. If
- True, the offset is randomized. Only True is supported.
- stride: Distance to sample between timesteps.
- num_windows: Number of sequence sampled.
-
- Returns:
- A single Tensor with first dimension num_steps with the sampled segment.
- """
- sequence_length = tf.shape(sequence)[0]
- sequence_length = tf.cast(sequence_length, tf.float32)
- if random:
- max_offset = tf.cond(
- tf.greater(sequence_length, (num_steps - 1) * stride),
- lambda: sequence_length - (num_steps - 1) * stride,
- lambda: sequence_length)
-
- max_offset = tf.cast(max_offset, dtype=tf.float32)
- def cdf(k, power=1.0):
- """Cumulative distribution function for x^power."""
- p = -tf.math.pow(k, power + 1) / (
- power * tf.math.pow(max_offset, power + 1)) + k * (power + 1) / (
- power * max_offset)
- return p
-
- u = tf.random.uniform(())
- k_low = tf.constant(0, dtype=tf.float32)
- k_up = max_offset
- k = tf.math.floordiv(max_offset, 2.0)
-
- c = lambda k_low, k_up, k: tf.greater(tf.math.abs(k_up - k_low), 1.0)
- # pylint:disable=g-long-lambda
- b = lambda k_low, k_up, k: tf.cond(
- tf.greater(cdf(k), u),
- lambda: [k_low, k, tf.math.floordiv(k + k_low, 2.0)],
- lambda: [k, k_up, tf.math.floordiv(k_up + k, 2.0)])
-
- _, _, k = tf.while_loop(c, b, [k_low, k_up, k])
- delta = tf.cast(k, tf.int32)
- max_offset = tf.cast(max_offset, tf.int32)
- sequence_length = tf.cast(sequence_length, tf.int32)
-
- choice_1 = tf.cond(
- tf.equal(max_offset, sequence_length),
- lambda: tf.random.uniform((),
- maxval=tf.cast(max_offset, dtype=tf.int32),
- dtype=tf.int32),
- lambda: tf.random.uniform((),
- maxval=tf.cast(max_offset - delta,
- dtype=tf.int32),
- dtype=tf.int32))
- choice_2 = tf.cond(
- tf.equal(max_offset, sequence_length),
- lambda: tf.random.uniform((),
- maxval=tf.cast(max_offset, dtype=tf.int32),
- dtype=tf.int32),
- lambda: choice_1 + delta)
- # pylint:disable=g-long-lambda
- shuffle_choice = tf.random.shuffle((choice_1, choice_2))
- offset_1 = shuffle_choice[0]
- offset_2 = shuffle_choice[1]
-
- else:
- raise NotImplementedError
-
- indices_1 = _sample_or_pad_sequence_indices(
- sequence=sequence,
- num_steps=num_steps,
- stride=stride,
- offset=offset_1)
-
- indices_2 = _sample_or_pad_sequence_indices(
- sequence=sequence,
- num_steps=num_steps,
- stride=stride,
- offset=offset_2)
-
- indices = tf.concat([indices_1, indices_2], axis=0)
- indices.set_shape((num_windows * num_steps,))
- output = tf.gather(sequence, indices)
-
- return output
diff --git a/official/vision/beta/projects/video_ssl/ops/video_ssl_preprocess_ops_test.py b/official/vision/beta/projects/video_ssl/ops/video_ssl_preprocess_ops_test.py
deleted file mode 100644
index 4cf667d31ced31ff6fe6e912ade0533d0476372b..0000000000000000000000000000000000000000
--- a/official/vision/beta/projects/video_ssl/ops/video_ssl_preprocess_ops_test.py
+++ /dev/null
@@ -1,47 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-
-import tensorflow as tf
-from official.vision.beta.ops import preprocess_ops_3d
-from official.vision.beta.projects.video_ssl.ops import video_ssl_preprocess_ops
-
-
-class VideoSslPreprocessOpsTest(tf.test.TestCase):
-
- def setUp(self):
- super().setUp()
- self._raw_frames = tf.random.uniform((250, 256, 256, 3), minval=0,
- maxval=255, dtype=tf.dtypes.int32)
- self._sampled_frames = self._raw_frames[:16]
- self._frames = preprocess_ops_3d.normalize_image(
- self._sampled_frames, False, tf.float32)
-
- def test_sample_ssl_sequence(self):
- sampled_seq = video_ssl_preprocess_ops.sample_ssl_sequence(
- self._raw_frames, 16, True, 2)
- self.assertAllEqual(sampled_seq.shape, (32, 256, 256, 3))
-
- def test_random_color_jitter_3d(self):
- jittered_clip = video_ssl_preprocess_ops.random_color_jitter_3d(
- self._frames)
- self.assertAllEqual(jittered_clip.shape, (16, 256, 256, 3))
-
- def test_random_blur_3d(self):
- blurred_clip = video_ssl_preprocess_ops.random_blur_3d(
- self._frames, 256, 256)
- self.assertAllEqual(blurred_clip.shape, (16, 256, 256, 3))
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/projects/video_ssl/tasks/__init__.py b/official/vision/beta/projects/video_ssl/tasks/__init__.py
deleted file mode 100644
index 89b2e66260c4ba71135a0b3613da28b1b4a57679..0000000000000000000000000000000000000000
--- a/official/vision/beta/projects/video_ssl/tasks/__init__.py
+++ /dev/null
@@ -1,18 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tasks package definition."""
-
-from official.vision.beta.projects.video_ssl.tasks import linear_eval
-from official.vision.beta.projects.video_ssl.tasks import pretrain
diff --git a/official/vision/beta/projects/video_ssl/tasks/linear_eval.py b/official/vision/beta/projects/video_ssl/tasks/linear_eval.py
deleted file mode 100644
index 6b8373f2fd634e0e82945e30ddf8e7ed02bc21c8..0000000000000000000000000000000000000000
--- a/official/vision/beta/projects/video_ssl/tasks/linear_eval.py
+++ /dev/null
@@ -1,71 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Video ssl linear evaluation task definition."""
-from typing import Any, Optional, List, Tuple
-from absl import logging
-import tensorflow as tf
-
-# pylint: disable=unused-import
-from official.core import task_factory
-from official.vision.beta.projects.video_ssl.configs import video_ssl as exp_cfg
-from official.vision.beta.projects.video_ssl.modeling import video_ssl_model
-from official.vision.beta.tasks import video_classification
-
-
-@task_factory.register_task_cls(exp_cfg.VideoSSLEvalTask)
-class VideoSSLEvalTask(video_classification.VideoClassificationTask):
- """A task for video ssl linear evaluation."""
-
- def initialize(self, model: tf.keras.Model):
- """Loading pretrained checkpoint."""
- if not self.task_config.init_checkpoint:
- return
-
- ckpt_dir_or_file = self.task_config.init_checkpoint
- if tf.io.gfile.isdir(ckpt_dir_or_file):
- ckpt_dir_or_file = tf.train.latest_checkpoint(ckpt_dir_or_file)
-
- # Restoring checkpoint.
- if self.task_config.init_checkpoint_modules == 'backbone':
- ckpt = tf.train.Checkpoint(backbone=model.backbone)
- ckpt.read(ckpt_dir_or_file)
- else:
- raise NotImplementedError
-
- logging.info('Finished loading pretrained checkpoint from %s',
- ckpt_dir_or_file)
-
- def train_step(self,
- inputs: Tuple[Any, Any],
- model: tf.keras.Model,
- optimizer: tf.keras.optimizers.Optimizer,
- metrics: Optional[List[Any]] = None):
- """Does forward and backward.
-
- Args:
- inputs: a dictionary of input tensors.
- model: the model, forward pass definition.
- optimizer: the optimizer for this training step.
- metrics: a nested structure of metrics objects.
-
- Returns:
- A dictionary of logs.
- """
- model.backbone.trainable = False
- logging.info('Setting the backbone to non-trainable.')
-
- return super(video_classification.VideoClassificationTask,
- self).train_step(inputs, model, optimizer, metrics)
diff --git a/official/vision/beta/projects/video_ssl/tasks/pretrain.py b/official/vision/beta/projects/video_ssl/tasks/pretrain.py
deleted file mode 100644
index cb6505435a248e713c06d64dbc5b87309424a7f3..0000000000000000000000000000000000000000
--- a/official/vision/beta/projects/video_ssl/tasks/pretrain.py
+++ /dev/null
@@ -1,186 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Video ssl pretrain task definition."""
-from absl import logging
-import tensorflow as tf
-
-# pylint: disable=unused-import
-from official.core import input_reader
-from official.core import task_factory
-from official.vision.beta.modeling import factory_3d
-from official.vision.beta.projects.video_ssl.configs import video_ssl as exp_cfg
-from official.vision.beta.projects.video_ssl.dataloaders import video_ssl_input
-from official.vision.beta.projects.video_ssl.losses import losses
-from official.vision.beta.projects.video_ssl.modeling import video_ssl_model
-from official.vision.beta.tasks import video_classification
-
-
-@task_factory.register_task_cls(exp_cfg.VideoSSLPretrainTask)
-class VideoSSLPretrainTask(video_classification.VideoClassificationTask):
- """A task for video ssl pretraining."""
-
- def build_model(self):
- """Builds video ssl pretraining model."""
- common_input_shape = [
- d1 if d1 == d2 else None
- for d1, d2 in zip(self.task_config.train_data.feature_shape,
- self.task_config.validation_data.feature_shape)
- ]
- input_specs = tf.keras.layers.InputSpec(shape=[None] + common_input_shape)
- logging.info('Build model input %r', common_input_shape)
-
- model = factory_3d.build_model(
- self.task_config.model.model_type,
- input_specs=input_specs,
- model_config=self.task_config.model,
- num_classes=self.task_config.train_data.num_classes)
- return model
-
- def _get_decoder_fn(self, params):
- decoder = video_ssl_input.Decoder()
- return decoder.decode
-
- def build_inputs(self, params: exp_cfg.DataConfig, input_context=None):
- """Builds classification input."""
-
- parser = video_ssl_input.Parser(input_params=params)
- postprocess_fn = video_ssl_input.PostBatchProcessor(params)
-
- reader = input_reader.InputReader(
- params,
- dataset_fn=self._get_dataset_fn(params),
- decoder_fn=self._get_decoder_fn(params),
- parser_fn=parser.parse_fn(params.is_training),
- postprocess_fn=postprocess_fn)
-
- dataset = reader.read(input_context=input_context)
-
- return dataset
-
- def build_losses(self, model_outputs, num_replicas, model):
- """Sparse categorical cross entropy loss.
-
- Args:
- model_outputs: Output logits of the model.
- num_replicas: distributed replica number.
- model: keras model for calculating weight decay.
-
- Returns:
- The total loss tensor.
- """
- all_losses = {}
- contrastive_metrics = {}
- losses_config = self.task_config.losses
- total_loss = None
- contrastive_loss_dict = losses.contrastive_loss(
- model_outputs, num_replicas, losses_config.normalize_hidden,
- losses_config.temperature, model,
- self.task_config.losses.l2_weight_decay)
- total_loss = contrastive_loss_dict['total_loss']
- all_losses.update({
- 'total_loss': total_loss
- })
- all_losses[self.loss] = total_loss
- contrastive_metrics.update({
- 'contrast_acc': contrastive_loss_dict['contrast_acc'],
- 'contrast_entropy': contrastive_loss_dict['contrast_entropy'],
- 'reg_loss': contrastive_loss_dict['reg_loss']
- })
- return all_losses, contrastive_metrics
-
- def build_metrics(self, training=True):
- """Gets streaming metrics for training/validation."""
- metrics = [
- tf.keras.metrics.Mean(name='contrast_acc'),
- tf.keras.metrics.Mean(name='contrast_entropy'),
- tf.keras.metrics.Mean(name='reg_loss')
- ]
- return metrics
-
- def process_metrics(self, metrics, contrastive_metrics):
- """Process and update metrics."""
- contrastive_metric_values = contrastive_metrics.values()
- for metric, contrastive_metric_value in zip(metrics,
- contrastive_metric_values):
- metric.update_state(contrastive_metric_value)
-
- def train_step(self, inputs, model, optimizer, metrics=None):
- """Does forward and backward.
-
- Args:
- inputs: a dictionary of input tensors.
- model: the model, forward pass definition.
- optimizer: the optimizer for this training step.
- metrics: a nested structure of metrics objects.
-
- Returns:
- A dictionary of logs.
- """
- features, _ = inputs
-
- num_replicas = tf.distribute.get_strategy().num_replicas_in_sync
- with tf.GradientTape() as tape:
- if self.task_config.train_data.output_audio:
- outputs = model(features, training=True)
- else:
- outputs = model(features['image'], training=True)
- # Casting output layer as float32 is necessary when mixed_precision is
- # mixed_float16 or mixed_bfloat16 to ensure output is casted as float32.
- outputs = tf.nest.map_structure(
- lambda x: tf.cast(x, tf.float32), outputs)
-
- all_losses, contrastive_metrics = self.build_losses(
- model_outputs=outputs, num_replicas=num_replicas,
- model=model)
- loss = all_losses[self.loss]
- scaled_loss = loss
-
- # For mixed_precision policy, when LossScaleOptimizer is used, loss is
- # scaled for numerical stability.
- if isinstance(
- optimizer, tf.keras.mixed_precision.LossScaleOptimizer):
- scaled_loss = optimizer.get_scaled_loss(scaled_loss)
-
- tvars = model.trainable_variables
- grads = tape.gradient(scaled_loss, tvars)
- # Scales back gradient before apply_gradients when LossScaleOptimizer is
- # used.
- if isinstance(optimizer, tf.keras.mixed_precision.LossScaleOptimizer):
- grads = optimizer.get_unscaled_gradients(grads)
- optimizer.apply_gradients(list(zip(grads, tvars)))
-
- logs = all_losses
- if metrics:
- self.process_metrics(metrics, contrastive_metrics)
- logs.update({m.name: m.result() for m in metrics})
- return logs
-
- def validation_step(self, inputs, model, metrics=None):
- """Validatation step.
-
- Args:
- inputs: a dictionary of input tensors.
- model: the keras.Model.
- metrics: a nested structure of metrics objects.
-
- Returns:
- A dictionary of logs.
- """
- raise NotImplementedError
-
- def inference_step(self, features, model):
- """Performs the forward step."""
- raise NotImplementedError
diff --git a/official/vision/beta/projects/video_ssl/tasks/pretrain_test.py b/official/vision/beta/projects/video_ssl/tasks/pretrain_test.py
deleted file mode 100644
index cb6ced6b266a772b1b775760565af66666faa2e2..0000000000000000000000000000000000000000
--- a/official/vision/beta/projects/video_ssl/tasks/pretrain_test.py
+++ /dev/null
@@ -1,82 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-
-import functools
-import os
-import random
-
-import orbit
-import tensorflow as tf
-
-# pylint: disable=unused-import
-from official.core import exp_factory
-from official.core import task_factory
-from official.modeling import optimization
-from official.vision import beta
-from official.vision.beta.dataloaders import tfexample_utils
-from official.vision.beta.projects.video_ssl.tasks import pretrain
-
-
-class VideoClassificationTaskTest(tf.test.TestCase):
-
- def setUp(self):
- super(VideoClassificationTaskTest, self).setUp()
- data_dir = os.path.join(self.get_temp_dir(), 'data')
- tf.io.gfile.makedirs(data_dir)
- self._data_path = os.path.join(data_dir, 'data.tfrecord')
- # pylint: disable=g-complex-comprehension
- examples = [
- tfexample_utils.make_video_test_example(
- image_shape=(36, 36, 3),
- audio_shape=(20, 128),
- label=random.randint(0, 100)) for _ in range(2)
- ]
- # pylint: enable=g-complex-comprehension
- tfexample_utils.dump_to_tfrecord(self._data_path, tf_examples=examples)
-
- def test_task(self):
- config = exp_factory.get_exp_config('video_ssl_pretrain_kinetics600')
- config.task.train_data.global_batch_size = 2
- config.task.train_data.input_path = self._data_path
-
- task = pretrain.VideoSSLPretrainTask(
- config.task)
- model = task.build_model()
- metrics = task.build_metrics()
- strategy = tf.distribute.get_strategy()
-
- dataset = orbit.utils.make_distributed_dataset(
- strategy,
- functools.partial(task.build_inputs),
- config.task.train_data)
-
- iterator = iter(dataset)
- opt_factory = optimization.OptimizerFactory(config.trainer.optimizer_config)
- optimizer = opt_factory.build_optimizer(opt_factory.build_learning_rate())
- logs = task.train_step(next(iterator), model, optimizer, metrics=metrics)
- self.assertIn('total_loss', logs)
- self.assertIn('reg_loss', logs)
- self.assertIn('contrast_acc', logs)
- self.assertIn('contrast_entropy', logs)
-
- def test_task_factory(self):
- config = exp_factory.get_exp_config('video_ssl_pretrain_kinetics600')
- task = task_factory.get_task(config.task)
- self.assertIs(type(task), pretrain.VideoSSLPretrainTask)
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/projects/video_ssl/train.py b/official/vision/beta/projects/video_ssl/train.py
deleted file mode 100644
index 663da196ef8890571d5a1ebf03df626026528852..0000000000000000000000000000000000000000
--- a/official/vision/beta/projects/video_ssl/train.py
+++ /dev/null
@@ -1,78 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Training driver."""
-
-from absl import app
-from absl import flags
-import gin
-
-# pylint: disable=unused-import
-from official.common import registry_imports
-from official.common import distribute_utils
-from official.common import flags as tfm_flags
-from official.core import task_factory
-from official.core import train_lib
-from official.core import train_utils
-from official.modeling import performance
-from official.vision.beta.projects.video_ssl.modeling import video_ssl_model
-from official.vision.beta.projects.video_ssl.tasks import linear_eval
-from official.vision.beta.projects.video_ssl.tasks import pretrain
-# pylint: disable=unused-import
-
-FLAGS = flags.FLAGS
-
-
-def main(_):
- gin.parse_config_files_and_bindings(FLAGS.gin_file, FLAGS.gin_params)
- params = train_utils.parse_configuration(FLAGS)
- model_dir = FLAGS.model_dir
- if 'train' in FLAGS.mode:
- # Pure eval modes do not output yaml files. Otherwise continuous eval job
- # may race against the train job for writing the same file.
- train_utils.serialize_config(params, model_dir)
-
- if 'train_and_eval' in FLAGS.mode:
- assert (params.task.train_data.feature_shape ==
- params.task.validation_data.feature_shape), (
- f'train {params.task.train_data.feature_shape} != validate '
- f'{params.task.validation_data.feature_shape}')
-
- # Sets mixed_precision policy. Using 'mixed_float16' or 'mixed_bfloat16'
- # can have significant impact on model speeds by utilizing float16 in case of
- # GPUs, and bfloat16 in the case of TPUs. loss_scale takes effect only when
- # dtype is float16
- if params.runtime.mixed_precision_dtype:
- performance.set_mixed_precision_policy(params.runtime.mixed_precision_dtype)
- distribution_strategy = distribute_utils.get_distribution_strategy(
- distribution_strategy=params.runtime.distribution_strategy,
- all_reduce_alg=params.runtime.all_reduce_alg,
- num_gpus=params.runtime.num_gpus,
- tpu_address=params.runtime.tpu)
- with distribution_strategy.scope():
- task = task_factory.get_task(params.task, logging_dir=model_dir)
-
- train_lib.run_experiment(
- distribution_strategy=distribution_strategy,
- task=task,
- mode=FLAGS.mode,
- params=params,
- model_dir=model_dir)
-
- train_utils.save_gin_config(FLAGS.mode, model_dir)
-
-if __name__ == '__main__':
- tfm_flags.define_flags()
- app.run(main)
diff --git a/official/vision/beta/projects/yolo/common/registry_imports.py b/official/vision/beta/projects/yolo/common/registry_imports.py
index 3d9d85d7b9133d685bf33d2f58e9e800c1b7d678..28218cdfa8162b4943ecb13f376c0653aeb642c9 100644
--- a/official/vision/beta/projects/yolo/common/registry_imports.py
+++ b/official/vision/beta/projects/yolo/common/registry_imports.py
@@ -16,7 +16,7 @@
# pylint: disable=unused-import
# pylint: disable=g-bad-import-order
-from official.common import registry_imports
+from official.vision import registry_imports
# import configs
from official.vision.beta.projects.yolo.configs import darknet_classification
diff --git a/official/vision/beta/projects/yolo/configs/backbones.py b/official/vision/beta/projects/yolo/configs/backbones.py
index 1bc3af3fd9fca88895022238e5b48425a78a7005..f397809a12dcc6f4b19b46eefe0d324466c7352a 100644
--- a/official/vision/beta/projects/yolo/configs/backbones.py
+++ b/official/vision/beta/projects/yolo/configs/backbones.py
@@ -15,7 +15,7 @@
"""Backbones configurations."""
import dataclasses
from official.modeling import hyperparams
-from official.vision.beta.configs import backbones
+from official.vision.configs import backbones
@dataclasses.dataclass
diff --git a/official/vision/beta/projects/yolo/configs/darknet_classification.py b/official/vision/beta/projects/yolo/configs/darknet_classification.py
index ee927ac0ec280d2f2fa99df51853ec8306e942a3..f1bd29a0972dcd252141486e1f3c5575ebd1fece 100644
--- a/official/vision/beta/projects/yolo/configs/darknet_classification.py
+++ b/official/vision/beta/projects/yolo/configs/darknet_classification.py
@@ -20,9 +20,9 @@ from typing import List, Optional
from official.core import config_definitions as cfg
from official.core import exp_factory
from official.modeling import hyperparams
-from official.vision.beta.configs import common
-from official.vision.beta.configs import image_classification as imc
from official.vision.beta.projects.yolo.configs import backbones
+from official.vision.configs import common
+from official.vision.configs import image_classification as imc
@dataclasses.dataclass
diff --git a/official/vision/beta/projects/yolo/configs/decoders.py b/official/vision/beta/projects/yolo/configs/decoders.py
index 0ae93daece96e72022f889b9876d4674eecd6ee6..2a796a1e29b7d06dfb65ee8be9d76624fb30e0a9 100755
--- a/official/vision/beta/projects/yolo/configs/decoders.py
+++ b/official/vision/beta/projects/yolo/configs/decoders.py
@@ -16,7 +16,7 @@
import dataclasses
from typing import Optional
from official.modeling import hyperparams
-from official.vision.beta.configs import decoders
+from official.vision.configs import decoders
@dataclasses.dataclass
diff --git a/official/vision/beta/projects/yolo/configs/yolo.py b/official/vision/beta/projects/yolo/configs/yolo.py
index 343fe334772b711651db6b4b4a5ad9c6ae69cf5a..59dcbb05410eb1c883ea67ef5b41106f785646a3 100755
--- a/official/vision/beta/projects/yolo/configs/yolo.py
+++ b/official/vision/beta/projects/yolo/configs/yolo.py
@@ -22,10 +22,10 @@ import numpy as np
from official.core import config_definitions as cfg
from official.core import exp_factory
from official.modeling import hyperparams
-from official.vision.beta.configs import common
from official.vision.beta.projects.yolo import optimization
from official.vision.beta.projects.yolo.configs import backbones
from official.vision.beta.projects.yolo.configs import decoders
+from official.vision.configs import common
# pytype: disable=annotation-type-mismatch
diff --git a/official/vision/beta/projects/yolo/dataloaders/classification_input.py b/official/vision/beta/projects/yolo/dataloaders/classification_input.py
index 4c9c663b296a8e71f3e66a6c1795f88480500ff0..e1737dba35417a18de64eb2c9d7a91a1665a5f0d 100755
--- a/official/vision/beta/projects/yolo/dataloaders/classification_input.py
+++ b/official/vision/beta/projects/yolo/dataloaders/classification_input.py
@@ -14,8 +14,8 @@
"""Classification decoder and parser."""
import tensorflow as tf
-from official.vision.beta.dataloaders import classification_input
-from official.vision.beta.ops import preprocess_ops
+from official.vision.dataloaders import classification_input
+from official.vision.ops import preprocess_ops
class Parser(classification_input.Parser):
diff --git a/official/vision/beta/projects/yolo/dataloaders/tf_example_decoder.py b/official/vision/beta/projects/yolo/dataloaders/tf_example_decoder.py
index 1b4a3fa0a1e260420da7c6f8db9873b903ba9932..8578b663f5c28e9872b9fd37a60febb8909fd380 100644
--- a/official/vision/beta/projects/yolo/dataloaders/tf_example_decoder.py
+++ b/official/vision/beta/projects/yolo/dataloaders/tf_example_decoder.py
@@ -19,7 +19,7 @@ protos for object detection.
"""
import tensorflow as tf
-from official.vision.beta.dataloaders import tf_example_decoder
+from official.vision.dataloaders import tf_example_decoder
def _coco91_to_80(classif, box, areas, iscrowds):
diff --git a/official/vision/beta/projects/yolo/dataloaders/yolo_input.py b/official/vision/beta/projects/yolo/dataloaders/yolo_input.py
index d8981b1d1801f20f6841513b1cabc8ce2b081b73..a6591aa0097e3fa49b48fee5905a69552326ab22 100755
--- a/official/vision/beta/projects/yolo/dataloaders/yolo_input.py
+++ b/official/vision/beta/projects/yolo/dataloaders/yolo_input.py
@@ -15,12 +15,12 @@
"""Detection Data parser and processing for YOLO."""
import tensorflow as tf
-from official.vision.beta.dataloaders import parser
-from official.vision.beta.dataloaders import utils
-from official.vision.beta.ops import box_ops as bbox_ops
-from official.vision.beta.ops import preprocess_ops
from official.vision.beta.projects.yolo.ops import anchor
from official.vision.beta.projects.yolo.ops import preprocessing_ops
+from official.vision.dataloaders import parser
+from official.vision.dataloaders import utils
+from official.vision.ops import box_ops as bbox_ops
+from official.vision.ops import preprocess_ops
class Parser(parser.Parser):
diff --git a/official/vision/beta/projects/yolo/modeling/backbones/darknet.py b/official/vision/beta/projects/yolo/modeling/backbones/darknet.py
index 623f15ed17a62b989cb1b843a6dbde14326d00c5..4f19379875e0d3af8c0a37fc5cc48635bd3f3419 100644
--- a/official/vision/beta/projects/yolo/modeling/backbones/darknet.py
+++ b/official/vision/beta/projects/yolo/modeling/backbones/darknet.py
@@ -36,11 +36,12 @@ Darknets are used mainly for object detection in:
"""
import collections
+
import tensorflow as tf
from official.modeling import hyperparams
-from official.vision.beta.modeling.backbones import factory
from official.vision.beta.projects.yolo.modeling.layers import nn_blocks
+from official.vision.modeling.backbones import factory
class BlockConfig:
diff --git a/official/vision/beta/projects/yolo/modeling/backbones/darknet_test.py b/official/vision/beta/projects/yolo/modeling/backbones/darknet_test.py
index 5daad329f916198c261ab3273adae7195f1ac2ea..00e7352f37cc14e0cc2af9de802172bbf9721584 100644
--- a/official/vision/beta/projects/yolo/modeling/backbones/darknet_test.py
+++ b/official/vision/beta/projects/yolo/modeling/backbones/darknet_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for yolo."""
from absl.testing import parameterized
diff --git a/official/vision/beta/projects/yolo/modeling/decoders/yolo_decoder.py b/official/vision/beta/projects/yolo/modeling/decoders/yolo_decoder.py
index aa3d6410583c840daaff26fc27b3c6f6815c3b2c..3aa0dfa44b2aaee17dc611110b0586607a71d150 100644
--- a/official/vision/beta/projects/yolo/modeling/decoders/yolo_decoder.py
+++ b/official/vision/beta/projects/yolo/modeling/decoders/yolo_decoder.py
@@ -13,13 +13,13 @@
# limitations under the License.
"""Feature Pyramid Network and Path Aggregation variants used in YOLO."""
-from typing import Mapping, Union, Optional
+from typing import Mapping, Optional, Union
import tensorflow as tf
from official.modeling import hyperparams
-from official.vision.beta.modeling.decoders import factory
from official.vision.beta.projects.yolo.modeling.layers import nn_blocks
+from official.vision.modeling.decoders import factory
# model configurations
# the structure is as follows. model version, {v3, v4, v#, ... etc}
diff --git a/official/vision/beta/projects/yolo/modeling/decoders/yolo_decoder_test.py b/official/vision/beta/projects/yolo/modeling/decoders/yolo_decoder_test.py
index 18b3c38c78fc7576619fe96facbcd08979e9d397..85887312454b12e0cd3ddf7628d21a08e1561aaa 100644
--- a/official/vision/beta/projects/yolo/modeling/decoders/yolo_decoder_test.py
+++ b/official/vision/beta/projects/yolo/modeling/decoders/yolo_decoder_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for YOLO."""
# Import libraries
diff --git a/official/vision/beta/projects/yolo/modeling/factory.py b/official/vision/beta/projects/yolo/modeling/factory.py
index 68066a37c10eb6d6b6bc1d9b60491dbc7f37422b..1fbbecb4986149f6a8111d7e9b5e40b748e78193 100644
--- a/official/vision/beta/projects/yolo/modeling/factory.py
+++ b/official/vision/beta/projects/yolo/modeling/factory.py
@@ -15,13 +15,13 @@
"""Contains common factory functions yolo neural networks."""
from absl import logging
-from official.vision.beta.modeling.backbones import factory as backbone_factory
-from official.vision.beta.modeling.decoders import factory as decoder_factory
from official.vision.beta.projects.yolo.configs import yolo
from official.vision.beta.projects.yolo.modeling import yolo_model
from official.vision.beta.projects.yolo.modeling.heads import yolo_head
from official.vision.beta.projects.yolo.modeling.layers import detection_generator
+from official.vision.modeling.backbones import factory as backbone_factory
+from official.vision.modeling.decoders import factory as decoder_factory
def build_yolo_detection_generator(model_config: yolo.Yolo, anchor_boxes):
diff --git a/official/vision/beta/projects/yolo/modeling/heads/yolo_head_test.py b/official/vision/beta/projects/yolo/modeling/heads/yolo_head_test.py
index ebc18c1fd9b6d1a7226acb94afbe0ec7d79a3799..37818743a7053d86f6066d367226f36331ba0c59 100644
--- a/official/vision/beta/projects/yolo/modeling/heads/yolo_head_test.py
+++ b/official/vision/beta/projects/yolo/modeling/heads/yolo_head_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for yolo heads."""
# Import libraries
diff --git a/official/vision/beta/projects/yolo/modeling/layers/detection_generator.py b/official/vision/beta/projects/yolo/modeling/layers/detection_generator.py
index 1adc1e3c9093435feb916e3d9103953fa6ef1965..e3df866aa06acb9ca06106ad942b04c7c8595c31 100644
--- a/official/vision/beta/projects/yolo/modeling/layers/detection_generator.py
+++ b/official/vision/beta/projects/yolo/modeling/layers/detection_generator.py
@@ -15,10 +15,10 @@
"""Contains common building blocks for yolo layer (detection layer)."""
import tensorflow as tf
-from official.vision.beta.modeling.layers import detection_generator
from official.vision.beta.projects.yolo.losses import yolo_loss
from official.vision.beta.projects.yolo.ops import box_ops
from official.vision.beta.projects.yolo.ops import loss_utils
+from official.vision.modeling.layers import detection_generator
class YoloLayer(tf.keras.Model):
diff --git a/official/vision/beta/projects/yolo/modeling/layers/nn_blocks.py b/official/vision/beta/projects/yolo/modeling/layers/nn_blocks.py
index f4ab88492c6cfe03e906463161c23546c13b5113..5598d1580a1b0a8704a98914201923a75dd08527 100644
--- a/official/vision/beta/projects/yolo/modeling/layers/nn_blocks.py
+++ b/official/vision/beta/projects/yolo/modeling/layers/nn_blocks.py
@@ -18,7 +18,7 @@ from typing import Callable, List, Tuple
import tensorflow as tf
from official.modeling import tf_utils
-from official.vision.beta.ops import spatial_transform_ops
+from official.vision.ops import spatial_transform_ops
class Identity(tf.keras.layers.Layer):
diff --git a/official/vision/beta/projects/yolo/modeling/layers/nn_blocks_test.py b/official/vision/beta/projects/yolo/modeling/layers/nn_blocks_test.py
index 1c15905b6347e7532d425940b349070f4a1b2efa..5e88c09f4a25b5d27112ffed55d1beefae1cc036 100644
--- a/official/vision/beta/projects/yolo/modeling/layers/nn_blocks_test.py
+++ b/official/vision/beta/projects/yolo/modeling/layers/nn_blocks_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
from absl.testing import parameterized
import numpy as np
import tensorflow as tf
diff --git a/official/vision/beta/projects/yolo/ops/mosaic.py b/official/vision/beta/projects/yolo/ops/mosaic.py
index c49423104d562dfa3703c21ed9078db0e065ceb2..e3982de2df8713f17d0a599e07d6a018042e0502 100755
--- a/official/vision/beta/projects/yolo/ops/mosaic.py
+++ b/official/vision/beta/projects/yolo/ops/mosaic.py
@@ -14,12 +14,13 @@
"""Mosaic op."""
import random
+
import tensorflow as tf
import tensorflow_addons as tfa
-from official.vision.beta.ops import box_ops
-from official.vision.beta.ops import preprocess_ops
from official.vision.beta.projects.yolo.ops import preprocessing_ops
+from official.vision.ops import box_ops
+from official.vision.ops import preprocess_ops
class Mosaic:
diff --git a/official/vision/beta/projects/yolo/ops/preprocessing_ops.py b/official/vision/beta/projects/yolo/ops/preprocessing_ops.py
index bc97cc4601b294339d177b712fe69a77133669e8..93c8b1569228fe630f0cdebd90fc89eae8d6355e 100755
--- a/official/vision/beta/projects/yolo/ops/preprocessing_ops.py
+++ b/official/vision/beta/projects/yolo/ops/preprocessing_ops.py
@@ -19,7 +19,7 @@ import numpy as np
import tensorflow as tf
import tensorflow_addons as tfa
-from official.vision.beta.ops import box_ops as bbox_ops
+from official.vision.ops import box_ops as bbox_ops
PAD_VALUE = 114
GLOBAL_SEED_SET = False
diff --git a/official/vision/beta/projects/yolo/ops/preprocessing_ops_test.py b/official/vision/beta/projects/yolo/ops/preprocessing_ops_test.py
index 22cfc1c8a9f6ac666375bc66b10a09b9e5ba27ba..c2f477684ba7a10eb8e774236b09b1986f3620f5 100755
--- a/official/vision/beta/projects/yolo/ops/preprocessing_ops_test.py
+++ b/official/vision/beta/projects/yolo/ops/preprocessing_ops_test.py
@@ -17,8 +17,8 @@ from absl.testing import parameterized
import numpy as np
import tensorflow as tf
-from official.vision.beta.ops import box_ops as bbox_ops
from official.vision.beta.projects.yolo.ops import preprocessing_ops
+from official.vision.ops import box_ops as bbox_ops
class InputUtilsTest(parameterized.TestCase, tf.test.TestCase):
diff --git a/official/vision/beta/projects/yolo/tasks/image_classification.py b/official/vision/beta/projects/yolo/tasks/image_classification.py
index c0fdd0ae17d98b51c718c71134e438159a56ddce..b69bee618e76a7639840bb8cb27898c41eb5e472 100644
--- a/official/vision/beta/projects/yolo/tasks/image_classification.py
+++ b/official/vision/beta/projects/yolo/tasks/image_classification.py
@@ -15,12 +15,12 @@
"""Image classification task definition."""
from official.common import dataset_fn
from official.core import task_factory
-from official.vision.beta.dataloaders import classification_input as classification_input_base
-from official.vision.beta.dataloaders import input_reader_factory
-from official.vision.beta.dataloaders import tfds_factory
from official.vision.beta.projects.yolo.configs import darknet_classification as exp_cfg
from official.vision.beta.projects.yolo.dataloaders import classification_input
-from official.vision.beta.tasks import image_classification
+from official.vision.dataloaders import classification_input as classification_input_base
+from official.vision.dataloaders import input_reader_factory
+from official.vision.dataloaders import tfds_factory
+from official.vision.tasks import image_classification
@task_factory.register_task_cls(exp_cfg.ImageClassificationTask)
diff --git a/official/vision/beta/projects/yolo/tasks/yolo.py b/official/vision/beta/projects/yolo/tasks/yolo.py
index 6d9e9f48497a91470bf85c30cd8e76c165a825f6..4441012f6e4e43885806c26ea91389fbd5b3a6df 100755
--- a/official/vision/beta/projects/yolo/tasks/yolo.py
+++ b/official/vision/beta/projects/yolo/tasks/yolo.py
@@ -26,10 +26,6 @@ from official.core import config_definitions
from official.core import input_reader
from official.core import task_factory
from official.modeling import performance
-from official.vision.beta.dataloaders import tfds_factory
-from official.vision.beta.dataloaders import tf_example_label_map_decoder
-from official.vision.beta.evaluation import coco_evaluator
-from official.vision.beta.ops import box_ops
from official.vision.beta.projects.yolo import optimization
from official.vision.beta.projects.yolo.configs import yolo as exp_cfg
from official.vision.beta.projects.yolo.dataloaders import tf_example_decoder
@@ -39,6 +35,10 @@ from official.vision.beta.projects.yolo.ops import kmeans_anchors
from official.vision.beta.projects.yolo.ops import mosaic
from official.vision.beta.projects.yolo.ops import preprocessing_ops
from official.vision.beta.projects.yolo.tasks import task_utils
+from official.vision.dataloaders import tfds_factory
+from official.vision.dataloaders.google import tf_example_label_map_decoder
+from official.vision.evaluation import coco_evaluator
+from official.vision.ops import box_ops
OptimizationConfig = optimization.OptimizationConfig
RuntimeConfig = config_definitions.RuntimeConfig
diff --git a/official/vision/beta/serving/__init__.py b/official/vision/beta/serving/__init__.py
deleted file mode 100644
index 310bfb28f0c252bc4a4485325059bff28c5250c2..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/__init__.py
+++ /dev/null
@@ -1,14 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
diff --git a/official/vision/beta/serving/detection.py b/official/vision/beta/serving/detection.py
deleted file mode 100644
index 173c265463f7fcf81ebb6ecdda65ae7faf70cf52..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/detection.py
+++ /dev/null
@@ -1,206 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Detection input and model functions for serving/inference."""
-
-from typing import Mapping, Text
-import tensorflow as tf
-
-from official.vision.beta import configs
-from official.vision.beta.modeling import factory
-from official.vision.beta.ops import anchor
-from official.vision.beta.ops import box_ops
-from official.vision.beta.ops import preprocess_ops
-from official.vision.beta.serving import export_base
-
-
-MEAN_RGB = (0.485 * 255, 0.456 * 255, 0.406 * 255)
-STDDEV_RGB = (0.229 * 255, 0.224 * 255, 0.225 * 255)
-
-
-class DetectionModule(export_base.ExportModule):
- """Detection Module."""
-
- def _build_model(self):
-
- if self._batch_size is None:
- raise ValueError('batch_size cannot be None for detection models.')
- input_specs = tf.keras.layers.InputSpec(shape=[self._batch_size] +
- self._input_image_size + [3])
-
- if isinstance(self.params.task.model, configs.maskrcnn.MaskRCNN):
- model = factory.build_maskrcnn(
- input_specs=input_specs, model_config=self.params.task.model)
- elif isinstance(self.params.task.model, configs.retinanet.RetinaNet):
- model = factory.build_retinanet(
- input_specs=input_specs, model_config=self.params.task.model)
- else:
- raise ValueError('Detection module not implemented for {} model.'.format(
- type(self.params.task.model)))
-
- return model
-
- def _build_anchor_boxes(self):
- """Builds and returns anchor boxes."""
- model_params = self.params.task.model
- input_anchor = anchor.build_anchor_generator(
- min_level=model_params.min_level,
- max_level=model_params.max_level,
- num_scales=model_params.anchor.num_scales,
- aspect_ratios=model_params.anchor.aspect_ratios,
- anchor_size=model_params.anchor.anchor_size)
- return input_anchor(
- image_size=(self._input_image_size[0], self._input_image_size[1]))
-
- def _build_inputs(self, image):
- """Builds detection model inputs for serving."""
- model_params = self.params.task.model
- # Normalizes image with mean and std pixel values.
- image = preprocess_ops.normalize_image(image,
- offset=MEAN_RGB,
- scale=STDDEV_RGB)
-
- image, image_info = preprocess_ops.resize_and_crop_image(
- image,
- self._input_image_size,
- padded_size=preprocess_ops.compute_padded_size(
- self._input_image_size, 2**model_params.max_level),
- aug_scale_min=1.0,
- aug_scale_max=1.0)
- anchor_boxes = self._build_anchor_boxes()
-
- return image, anchor_boxes, image_info
-
- def preprocess(self, images: tf.Tensor) -> (
- tf.Tensor, Mapping[Text, tf.Tensor], tf.Tensor):
- """Preprocess inputs to be suitable for the model.
-
- Args:
- images: The images tensor.
- Returns:
- images: The images tensor cast to float.
- anchor_boxes: Dict mapping anchor levels to anchor boxes.
- image_info: Tensor containing the details of the image resizing.
-
- """
- model_params = self.params.task.model
- with tf.device('cpu:0'):
- images = tf.cast(images, dtype=tf.float32)
-
- # Tensor Specs for map_fn outputs (images, anchor_boxes, and image_info).
- images_spec = tf.TensorSpec(shape=self._input_image_size + [3],
- dtype=tf.float32)
-
- num_anchors = model_params.anchor.num_scales * len(
- model_params.anchor.aspect_ratios) * 4
- anchor_shapes = []
- for level in range(model_params.min_level, model_params.max_level + 1):
- anchor_level_spec = tf.TensorSpec(
- shape=[
- self._input_image_size[0] // 2**level,
- self._input_image_size[1] // 2**level, num_anchors
- ],
- dtype=tf.float32)
- anchor_shapes.append((str(level), anchor_level_spec))
-
- image_info_spec = tf.TensorSpec(shape=[4, 2], dtype=tf.float32)
-
- images, anchor_boxes, image_info = tf.nest.map_structure(
- tf.identity,
- tf.map_fn(
- self._build_inputs,
- elems=images,
- fn_output_signature=(images_spec, dict(anchor_shapes),
- image_info_spec),
- parallel_iterations=32))
-
- return images, anchor_boxes, image_info
-
- def serve(self, images: tf.Tensor):
- """Cast image to float and run inference.
-
- Args:
- images: uint8 Tensor of shape [batch_size, None, None, 3]
- Returns:
- Tensor holding detection output logits.
- """
-
- # Skip image preprocessing when input_type is tflite so it is compatible
- # with TFLite quantization.
- if self._input_type != 'tflite':
- images, anchor_boxes, image_info = self.preprocess(images)
- else:
- with tf.device('cpu:0'):
- anchor_boxes = self._build_anchor_boxes()
- # image_info is a 3D tensor of shape [batch_size, 4, 2]. It is in the
- # format of [[original_height, original_width],
- # [desired_height, desired_width], [y_scale, x_scale],
- # [y_offset, x_offset]]. When input_type is tflite, input image is
- # supposed to be preprocessed already.
- image_info = tf.convert_to_tensor([[
- self._input_image_size, self._input_image_size, [1.0, 1.0], [0, 0]
- ]],
- dtype=tf.float32)
- input_image_shape = image_info[:, 1, :]
-
- # To overcome keras.Model extra limitation to save a model with layers that
- # have multiple inputs, we use `model.call` here to trigger the forward
- # path. Note that, this disables some keras magics happens in `__call__`.
- detections = self.model.call(
- images=images,
- image_shape=input_image_shape,
- anchor_boxes=anchor_boxes,
- training=False)
-
- if self.params.task.model.detection_generator.apply_nms:
- # For RetinaNet model, apply export_config.
- # TODO(huizhongc): Add export_config to fasterrcnn and maskrcnn as needed.
- if isinstance(self.params.task.model, configs.retinanet.RetinaNet):
- export_config = self.params.task.export_config
- # Normalize detection box coordinates to [0, 1].
- if export_config.output_normalized_coordinates:
- detection_boxes = (
- detections['detection_boxes'] /
- tf.tile(image_info[:, 2:3, :], [1, 1, 2]))
- detections['detection_boxes'] = box_ops.normalize_boxes(
- detection_boxes, image_info[:, 0:1, :])
-
- # Cast num_detections and detection_classes to float. This allows the
- # model inference to work on chain (go/chain) as chain requires floating
- # point outputs.
- if export_config.cast_num_detections_to_float:
- detections['num_detections'] = tf.cast(
- detections['num_detections'], dtype=tf.float32)
- if export_config.cast_detection_classes_to_float:
- detections['detection_classes'] = tf.cast(
- detections['detection_classes'], dtype=tf.float32)
-
- final_outputs = {
- 'detection_boxes': detections['detection_boxes'],
- 'detection_scores': detections['detection_scores'],
- 'detection_classes': detections['detection_classes'],
- 'num_detections': detections['num_detections']
- }
- else:
- final_outputs = {
- 'decoded_boxes': detections['decoded_boxes'],
- 'decoded_box_scores': detections['decoded_box_scores']
- }
-
- if 'detection_masks' in detections.keys():
- final_outputs['detection_masks'] = detections['detection_masks']
-
- final_outputs.update({'image_info': image_info})
- return final_outputs
diff --git a/official/vision/beta/serving/detection_test.py b/official/vision/beta/serving/detection_test.py
deleted file mode 100644
index e51a9c2244262e5a6b205725889ad31ca822e1cc..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/detection_test.py
+++ /dev/null
@@ -1,145 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Test for image detection export lib."""
-
-import io
-import os
-
-from absl.testing import parameterized
-import numpy as np
-from PIL import Image
-import tensorflow as tf
-
-from official.common import registry_imports # pylint: disable=unused-import
-from official.core import exp_factory
-from official.vision.beta.serving import detection
-
-
-class DetectionExportTest(tf.test.TestCase, parameterized.TestCase):
-
- def _get_detection_module(self, experiment_name, input_type):
- params = exp_factory.get_exp_config(experiment_name)
- params.task.model.backbone.resnet.model_id = 18
- params.task.model.detection_generator.nms_version = 'batched'
- detection_module = detection.DetectionModule(
- params,
- batch_size=1,
- input_image_size=[640, 640],
- input_type=input_type)
- return detection_module
-
- def _export_from_module(self, module, input_type, save_directory):
- signatures = module.get_inference_signatures(
- {input_type: 'serving_default'})
- tf.saved_model.save(module, save_directory, signatures=signatures)
-
- def _get_dummy_input(self, input_type, batch_size, image_size):
- """Get dummy input for the given input type."""
- h, w = image_size
-
- if input_type == 'image_tensor':
- return tf.zeros((batch_size, h, w, 3), dtype=np.uint8)
- elif input_type == 'image_bytes':
- image = Image.fromarray(np.zeros((h, w, 3), dtype=np.uint8))
- byte_io = io.BytesIO()
- image.save(byte_io, 'PNG')
- return [byte_io.getvalue() for b in range(batch_size)]
- elif input_type == 'tf_example':
- image_tensor = tf.zeros((h, w, 3), dtype=tf.uint8)
- encoded_jpeg = tf.image.encode_jpeg(tf.constant(image_tensor)).numpy()
- example = tf.train.Example(
- features=tf.train.Features(
- feature={
- 'image/encoded':
- tf.train.Feature(
- bytes_list=tf.train.BytesList(value=[encoded_jpeg])),
- })).SerializeToString()
- return [example for b in range(batch_size)]
- elif input_type == 'tflite':
- return tf.zeros((batch_size, h, w, 3), dtype=np.float32)
-
- @parameterized.parameters(
- ('image_tensor', 'fasterrcnn_resnetfpn_coco', [384, 384]),
- ('image_bytes', 'fasterrcnn_resnetfpn_coco', [640, 640]),
- ('tf_example', 'fasterrcnn_resnetfpn_coco', [640, 640]),
- ('tflite', 'fasterrcnn_resnetfpn_coco', [640, 640]),
- ('image_tensor', 'maskrcnn_resnetfpn_coco', [640, 640]),
- ('image_bytes', 'maskrcnn_resnetfpn_coco', [640, 384]),
- ('tf_example', 'maskrcnn_resnetfpn_coco', [640, 640]),
- ('tflite', 'maskrcnn_resnetfpn_coco', [640, 640]),
- ('image_tensor', 'retinanet_resnetfpn_coco', [640, 640]),
- ('image_bytes', 'retinanet_resnetfpn_coco', [640, 640]),
- ('tf_example', 'retinanet_resnetfpn_coco', [384, 640]),
- ('tflite', 'retinanet_resnetfpn_coco', [640, 640]),
- ('image_tensor', 'retinanet_resnetfpn_coco', [384, 384]),
- ('image_bytes', 'retinanet_spinenet_coco', [640, 640]),
- ('tf_example', 'retinanet_spinenet_coco', [640, 384]),
- ('tflite', 'retinanet_spinenet_coco', [640, 640]),
- )
- def test_export(self, input_type, experiment_name, image_size):
- tmp_dir = self.get_temp_dir()
- module = self._get_detection_module(experiment_name, input_type)
-
- self._export_from_module(module, input_type, tmp_dir)
-
- self.assertTrue(os.path.exists(os.path.join(tmp_dir, 'saved_model.pb')))
- self.assertTrue(
- os.path.exists(os.path.join(tmp_dir, 'variables', 'variables.index')))
- self.assertTrue(
- os.path.exists(
- os.path.join(tmp_dir, 'variables',
- 'variables.data-00000-of-00001')))
-
- imported = tf.saved_model.load(tmp_dir)
- detection_fn = imported.signatures['serving_default']
-
- images = self._get_dummy_input(
- input_type, batch_size=1, image_size=image_size)
-
- if input_type == 'tflite':
- processed_images = tf.zeros(image_size + [3], dtype=tf.float32)
- anchor_boxes = module._build_anchor_boxes()
- image_info = tf.convert_to_tensor(
- [image_size, image_size, [1.0, 1.0], [0, 0]], dtype=tf.float32)
- else:
- processed_images, anchor_boxes, image_info = module._build_inputs(
- tf.zeros((224, 224, 3), dtype=tf.uint8))
- image_shape = image_info[1, :]
- image_shape = tf.expand_dims(image_shape, 0)
- processed_images = tf.expand_dims(processed_images, 0)
- for l, l_boxes in anchor_boxes.items():
- anchor_boxes[l] = tf.expand_dims(l_boxes, 0)
-
- expected_outputs = module.model(
- images=processed_images,
- image_shape=image_shape,
- anchor_boxes=anchor_boxes,
- training=False)
- outputs = detection_fn(tf.constant(images))
-
- self.assertAllClose(outputs['num_detections'].numpy(),
- expected_outputs['num_detections'].numpy())
-
- def test_build_model_fail_with_none_batch_size(self):
- params = exp_factory.get_exp_config('retinanet_resnetfpn_coco')
- with self.assertRaisesRegex(
- ValueError, 'batch_size cannot be None for detection models.'):
- detection.DetectionModule(
- params, batch_size=None, input_image_size=[640, 640])
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/serving/export_base.py b/official/vision/beta/serving/export_base.py
deleted file mode 100644
index 1700c82e9dcdde822a02f0f4560b0bb444bae0fd..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/export_base.py
+++ /dev/null
@@ -1,192 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Base class for model export."""
-
-import abc
-from typing import Dict, List, Mapping, Optional, Text
-
-import tensorflow as tf
-from official.core import config_definitions as cfg
-from official.core import export_base
-
-
-class ExportModule(export_base.ExportModule, metaclass=abc.ABCMeta):
- """Base Export Module."""
-
- def __init__(self,
- params: cfg.ExperimentConfig,
- *,
- batch_size: int,
- input_image_size: List[int],
- input_type: str = 'image_tensor',
- num_channels: int = 3,
- model: Optional[tf.keras.Model] = None):
- """Initializes a module for export.
-
- Args:
- params: Experiment params.
- batch_size: The batch size of the model input. Can be `int` or None.
- input_image_size: List or Tuple of size of the input image. For 2D image,
- it is [height, width].
- input_type: The input signature type.
- num_channels: The number of the image channels.
- model: A tf.keras.Model instance to be exported.
- """
- self.params = params
- self._batch_size = batch_size
- self._input_image_size = input_image_size
- self._num_channels = num_channels
- self._input_type = input_type
- if model is None:
- model = self._build_model() # pylint: disable=assignment-from-none
- super().__init__(params=params, model=model)
-
- def _decode_image(self, encoded_image_bytes: str) -> tf.Tensor:
- """Decodes an image bytes to an image tensor.
-
- Use `tf.image.decode_image` to decode an image if input is expected to be 2D
- image; otherwise use `tf.io.decode_raw` to convert the raw bytes to tensor
- and reshape it to desire shape.
-
- Args:
- encoded_image_bytes: An encoded image string to be decoded.
-
- Returns:
- A decoded image tensor.
- """
- if len(self._input_image_size) == 2:
- # Decode an image if 2D input is expected.
- image_tensor = tf.image.decode_image(
- encoded_image_bytes, channels=self._num_channels)
- image_tensor.set_shape((None, None, self._num_channels))
- else:
- # Convert raw bytes into a tensor and reshape it, if not 2D input.
- image_tensor = tf.io.decode_raw(encoded_image_bytes, out_type=tf.uint8)
- image_tensor = tf.reshape(image_tensor,
- self._input_image_size + [self._num_channels])
- return image_tensor
-
- def _decode_tf_example(
- self, tf_example_string_tensor: tf.train.Example) -> tf.Tensor:
- """Decodes a TF Example to an image tensor.
-
- Args:
- tf_example_string_tensor: A tf.train.Example of encoded image and other
- information.
-
- Returns:
- A decoded image tensor.
- """
- keys_to_features = {'image/encoded': tf.io.FixedLenFeature((), tf.string)}
- parsed_tensors = tf.io.parse_single_example(
- serialized=tf_example_string_tensor, features=keys_to_features)
- image_tensor = self._decode_image(parsed_tensors['image/encoded'])
- return image_tensor
-
- def _build_model(self, **kwargs):
- """Returns a model built from the params."""
- return None
-
- @tf.function
- def inference_from_image_tensors(
- self, inputs: tf.Tensor) -> Mapping[str, tf.Tensor]:
- return self.serve(inputs)
-
- @tf.function
- def inference_for_tflite(self, inputs: tf.Tensor) -> Mapping[str, tf.Tensor]:
- return self.serve(inputs)
-
- @tf.function
- def inference_from_image_bytes(self, inputs: tf.Tensor):
- with tf.device('cpu:0'):
- images = tf.nest.map_structure(
- tf.identity,
- tf.map_fn(
- self._decode_image,
- elems=inputs,
- fn_output_signature=tf.TensorSpec(
- shape=[None] * len(self._input_image_size) +
- [self._num_channels],
- dtype=tf.uint8),
- parallel_iterations=32))
- images = tf.stack(images)
- return self.serve(images)
-
- @tf.function
- def inference_from_tf_example(self,
- inputs: tf.Tensor) -> Mapping[str, tf.Tensor]:
- with tf.device('cpu:0'):
- images = tf.nest.map_structure(
- tf.identity,
- tf.map_fn(
- self._decode_tf_example,
- elems=inputs,
- # Height/width of the shape of input images is unspecified (None)
- # at the time of decoding the example, but the shape will
- # be adjusted to conform to the input layer of the model,
- # by _run_inference_on_image_tensors() below.
- fn_output_signature=tf.TensorSpec(
- shape=[None] * len(self._input_image_size) +
- [self._num_channels],
- dtype=tf.uint8),
- dtype=tf.uint8,
- parallel_iterations=32))
- images = tf.stack(images)
- return self.serve(images)
-
- def get_inference_signatures(self, function_keys: Dict[Text, Text]):
- """Gets defined function signatures.
-
- Args:
- function_keys: A dictionary with keys as the function to create signature
- for and values as the signature keys when returns.
-
- Returns:
- A dictionary with key as signature key and value as concrete functions
- that can be used for tf.saved_model.save.
- """
- signatures = {}
- for key, def_name in function_keys.items():
- if key == 'image_tensor':
- input_signature = tf.TensorSpec(
- shape=[self._batch_size] + [None] * len(self._input_image_size) +
- [self._num_channels],
- dtype=tf.uint8)
- signatures[
- def_name] = self.inference_from_image_tensors.get_concrete_function(
- input_signature)
- elif key == 'image_bytes':
- input_signature = tf.TensorSpec(
- shape=[self._batch_size], dtype=tf.string)
- signatures[
- def_name] = self.inference_from_image_bytes.get_concrete_function(
- input_signature)
- elif key == 'serve_examples' or key == 'tf_example':
- input_signature = tf.TensorSpec(
- shape=[self._batch_size], dtype=tf.string)
- signatures[
- def_name] = self.inference_from_tf_example.get_concrete_function(
- input_signature)
- elif key == 'tflite':
- input_signature = tf.TensorSpec(
- shape=[self._batch_size] + self._input_image_size +
- [self._num_channels],
- dtype=tf.float32)
- signatures[def_name] = self.inference_for_tflite.get_concrete_function(
- input_signature)
- else:
- raise ValueError('Unrecognized `input_type`')
- return signatures
diff --git a/official/vision/beta/serving/export_base_v2.py b/official/vision/beta/serving/export_base_v2.py
deleted file mode 100644
index 25469b1bb6ddb4397879f4b00ebc293189d71e50..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/export_base_v2.py
+++ /dev/null
@@ -1,75 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Base class for model export."""
-
-from typing import Dict, Optional, Text, Callable, Any, Union
-
-import tensorflow as tf
-
-from official.core import export_base
-
-
-class ExportModule(export_base.ExportModule):
- """Base Export Module."""
-
- def __init__(self,
- params,
- model: tf.keras.Model,
- input_signature: Union[tf.TensorSpec, Dict[str, tf.TensorSpec]],
- preprocessor: Optional[Callable[..., Any]] = None,
- inference_step: Optional[Callable[..., Any]] = None,
- postprocessor: Optional[Callable[..., Any]] = None):
- """Initializes a module for export.
-
- Args:
- params: A dataclass for parameters to the module.
- model: A tf.keras.Model instance to be exported.
- input_signature: tf.TensorSpec, e.g.
- tf.TensorSpec(shape=[None, 224, 224, 3], dtype=tf.uint8)
- preprocessor: An optional callable to preprocess the inputs.
- inference_step: An optional callable to forward-pass the model.
- postprocessor: An optional callable to postprocess the model outputs.
- """
- super().__init__(
- params,
- model=model,
- preprocessor=preprocessor,
- inference_step=inference_step,
- postprocessor=postprocessor)
- self.input_signature = input_signature
-
- @tf.function
- def serve(self, inputs):
- x = self.preprocessor(inputs=inputs) if self.preprocessor else inputs
- x = self.inference_step(x)
- x = self.postprocessor(x) if self.postprocessor else x
- return x
-
- def get_inference_signatures(self, function_keys: Dict[Text, Text]):
- """Gets defined function signatures.
-
- Args:
- function_keys: A dictionary with keys as the function to create signature
- for and values as the signature keys when returns.
-
- Returns:
- A dictionary with key as signature key and value as concrete functions
- that can be used for tf.saved_model.save.
- """
- signatures = {}
- for _, def_name in function_keys.items():
- signatures[def_name] = self.serve.get_concrete_function(
- self.input_signature)
- return signatures
diff --git a/official/vision/beta/serving/export_base_v2_test.py b/official/vision/beta/serving/export_base_v2_test.py
deleted file mode 100644
index 4d88fe8d6318f4fa315ac7015378097a5695eba0..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/export_base_v2_test.py
+++ /dev/null
@@ -1,89 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for official.core.export_base_v2."""
-import os
-
-import tensorflow as tf
-
-from official.core import export_base
-from official.vision.beta.serving import export_base_v2
-
-
-class TestModel(tf.keras.Model):
-
- def __init__(self):
- super().__init__()
- self._dense = tf.keras.layers.Dense(2)
-
- def call(self, inputs):
- return {'outputs': self._dense(inputs)}
-
-
-class ExportBaseTest(tf.test.TestCase):
-
- def test_preprocessor(self):
- tmp_dir = self.get_temp_dir()
- model = TestModel()
- inputs = tf.ones([2, 4], tf.float32)
-
- preprocess_fn = lambda inputs: 2 * inputs
-
- module = export_base_v2.ExportModule(
- params=None,
- input_signature=tf.TensorSpec(shape=[2, 4]),
- model=model,
- preprocessor=preprocess_fn)
- expected_output = model(preprocess_fn(inputs))
- ckpt_path = tf.train.Checkpoint(model=model).save(
- os.path.join(tmp_dir, 'ckpt'))
- export_dir = export_base.export(
- module, ['serving_default'],
- export_savedmodel_dir=tmp_dir,
- checkpoint_path=ckpt_path,
- timestamped=False)
- imported = tf.saved_model.load(export_dir)
- output = imported.signatures['serving_default'](inputs)
- print('output', output)
- self.assertAllClose(
- output['outputs'].numpy(), expected_output['outputs'].numpy())
-
- def test_postprocessor(self):
- tmp_dir = self.get_temp_dir()
- model = TestModel()
- inputs = tf.ones([2, 4], tf.float32)
-
- postprocess_fn = lambda logits: {'outputs': 2 * logits['outputs']}
-
- module = export_base_v2.ExportModule(
- params=None,
- model=model,
- input_signature=tf.TensorSpec(shape=[2, 4]),
- postprocessor=postprocess_fn)
- expected_output = postprocess_fn(model(inputs))
- ckpt_path = tf.train.Checkpoint(model=model).save(
- os.path.join(tmp_dir, 'ckpt'))
- export_dir = export_base.export(
- module, ['serving_default'],
- export_savedmodel_dir=tmp_dir,
- checkpoint_path=ckpt_path,
- timestamped=False)
- imported = tf.saved_model.load(export_dir)
- output = imported.signatures['serving_default'](inputs)
- self.assertAllClose(
- output['outputs'].numpy(), expected_output['outputs'].numpy())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/serving/export_module_factory.py b/official/vision/beta/serving/export_module_factory.py
deleted file mode 100644
index 73f1abffc8a6f20e57fd0599e8b3dd2804d53b7f..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/export_module_factory.py
+++ /dev/null
@@ -1,89 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Factory for vision export modules."""
-
-from typing import List, Optional
-
-import tensorflow as tf
-
-from official.core import config_definitions as cfg
-from official.vision.beta import configs
-from official.vision.beta.dataloaders import classification_input
-from official.vision.beta.modeling import factory
-from official.vision.beta.serving import export_base_v2 as export_base
-from official.vision.beta.serving import export_utils
-
-
-def create_classification_export_module(params: cfg.ExperimentConfig,
- input_type: str,
- batch_size: int,
- input_image_size: List[int],
- num_channels: int = 3):
- """Creats classification export module."""
- input_signature = export_utils.get_image_input_signatures(
- input_type, batch_size, input_image_size, num_channels)
- input_specs = tf.keras.layers.InputSpec(
- shape=[batch_size] + input_image_size + [num_channels])
-
- model = factory.build_classification_model(
- input_specs=input_specs,
- model_config=params.task.model,
- l2_regularizer=None)
-
- def preprocess_fn(inputs):
- image_tensor = export_utils.parse_image(inputs, input_type,
- input_image_size, num_channels)
- # If input_type is `tflite`, do not apply image preprocessing.
- if input_type == 'tflite':
- return image_tensor
-
- def preprocess_image_fn(inputs):
- return classification_input.Parser.inference_fn(
- inputs, input_image_size, num_channels)
-
- images = tf.map_fn(
- preprocess_image_fn, elems=image_tensor,
- fn_output_signature=tf.TensorSpec(
- shape=input_image_size + [num_channels],
- dtype=tf.float32))
-
- return images
-
- def postprocess_fn(logits):
- probs = tf.nn.softmax(logits)
- return {'logits': logits, 'probs': probs}
-
- export_module = export_base.ExportModule(params,
- model=model,
- input_signature=input_signature,
- preprocessor=preprocess_fn,
- postprocessor=postprocess_fn)
- return export_module
-
-
-def get_export_module(params: cfg.ExperimentConfig,
- input_type: str,
- batch_size: Optional[int],
- input_image_size: List[int],
- num_channels: int = 3) -> export_base.ExportModule:
- """Factory for export modules."""
- if isinstance(params.task,
- configs.image_classification.ImageClassificationTask):
- export_module = create_classification_export_module(
- params, input_type, batch_size, input_image_size, num_channels)
- else:
- raise ValueError('Export module not implemented for {} task.'.format(
- type(params.task)))
- return export_module
diff --git a/official/vision/beta/serving/export_module_factory_test.py b/official/vision/beta/serving/export_module_factory_test.py
deleted file mode 100644
index f3ffed10ffef9603accfb037cb8d60cd505f9f04..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/export_module_factory_test.py
+++ /dev/null
@@ -1,117 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Test for vision modules."""
-
-import io
-import os
-
-from absl.testing import parameterized
-import numpy as np
-from PIL import Image
-import tensorflow as tf
-
-from official.common import registry_imports # pylint: disable=unused-import
-from official.core import exp_factory
-from official.core import export_base
-from official.vision.beta.dataloaders import classification_input
-from official.vision.beta.serving import export_module_factory
-
-
-class ImageClassificationExportTest(tf.test.TestCase, parameterized.TestCase):
-
- def _get_classification_module(self, input_type, input_image_size):
- params = exp_factory.get_exp_config('resnet_imagenet')
- params.task.model.backbone.resnet.model_id = 18
- module = export_module_factory.create_classification_export_module(
- params, input_type, batch_size=1, input_image_size=input_image_size)
- return module
-
- def _get_dummy_input(self, input_type):
- """Get dummy input for the given input type."""
-
- if input_type == 'image_tensor':
- return tf.zeros((1, 32, 32, 3), dtype=np.uint8)
- elif input_type == 'image_bytes':
- image = Image.fromarray(np.zeros((32, 32, 3), dtype=np.uint8))
- byte_io = io.BytesIO()
- image.save(byte_io, 'PNG')
- return [byte_io.getvalue()]
- elif input_type == 'tf_example':
- image_tensor = tf.zeros((32, 32, 3), dtype=tf.uint8)
- encoded_jpeg = tf.image.encode_jpeg(tf.constant(image_tensor)).numpy()
- example = tf.train.Example(
- features=tf.train.Features(
- feature={
- 'image/encoded':
- tf.train.Feature(
- bytes_list=tf.train.BytesList(value=[encoded_jpeg])),
- })).SerializeToString()
- return [example]
-
- @parameterized.parameters(
- {'input_type': 'image_tensor'},
- {'input_type': 'image_bytes'},
- {'input_type': 'tf_example'},
- )
- def test_export(self, input_type='image_tensor'):
- input_image_size = [32, 32]
- tmp_dir = self.get_temp_dir()
- module = self._get_classification_module(input_type, input_image_size)
- # Test that the model restores any attrs that are trackable objects
- # (eg: tables, resource variables, keras models/layers, tf.hub modules).
- module.model.test_trackable = tf.keras.layers.InputLayer(input_shape=(4,))
- ckpt_path = tf.train.Checkpoint(model=module.model).save(
- os.path.join(tmp_dir, 'ckpt'))
- export_dir = export_base.export(
- module, [input_type],
- export_savedmodel_dir=tmp_dir,
- checkpoint_path=ckpt_path,
- timestamped=False)
-
- self.assertTrue(os.path.exists(os.path.join(tmp_dir, 'saved_model.pb')))
- self.assertTrue(os.path.exists(
- os.path.join(tmp_dir, 'variables', 'variables.index')))
- self.assertTrue(os.path.exists(
- os.path.join(tmp_dir, 'variables', 'variables.data-00000-of-00001')))
-
- imported = tf.saved_model.load(export_dir)
- classification_fn = imported.signatures['serving_default']
-
- images = self._get_dummy_input(input_type)
-
- def preprocess_image_fn(inputs):
- return classification_input.Parser.inference_fn(
- inputs, input_image_size, num_channels=3)
-
- processed_images = tf.map_fn(
- preprocess_image_fn,
- elems=tf.zeros([1] + input_image_size + [3], dtype=tf.uint8),
- fn_output_signature=tf.TensorSpec(
- shape=input_image_size + [3], dtype=tf.float32))
- expected_logits = module.model(processed_images, training=False)
- expected_prob = tf.nn.softmax(expected_logits)
- out = classification_fn(tf.constant(images))
-
- # The imported model should contain any trackable attrs that the original
- # model had.
- self.assertTrue(hasattr(imported.model, 'test_trackable'))
- self.assertAllClose(
- out['logits'].numpy(), expected_logits.numpy(), rtol=1e-04, atol=1e-04)
- self.assertAllClose(
- out['probs'].numpy(), expected_prob.numpy(), rtol=1e-04, atol=1e-04)
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/serving/export_saved_model.py b/official/vision/beta/serving/export_saved_model.py
deleted file mode 100644
index c1a5336863a34cddc5319a51433f0dc160604603..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/export_saved_model.py
+++ /dev/null
@@ -1,107 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-r"""Vision models export binary for serving/inference.
-
-To export a trained checkpoint in saved_model format (shell script):
-
-EXPERIMENT_TYPE = XX
-CHECKPOINT_PATH = XX
-EXPORT_DIR_PATH = XX
-export_saved_model --experiment=${EXPERIMENT_TYPE} \
- --export_dir=${EXPORT_DIR_PATH}/ \
- --checkpoint_path=${CHECKPOINT_PATH} \
- --batch_size=2 \
- --input_image_size=224,224
-
-To serve (python):
-
-export_dir_path = XX
-input_type = XX
-input_images = XX
-imported = tf.saved_model.load(export_dir_path)
-model_fn = imported.signatures['serving_default']
-output = model_fn(input_images)
-"""
-
-from absl import app
-from absl import flags
-
-from official.common import registry_imports # pylint: disable=unused-import
-from official.core import exp_factory
-from official.modeling import hyperparams
-from official.vision.beta.serving import export_saved_model_lib
-
-FLAGS = flags.FLAGS
-
-
-flags.DEFINE_string(
- 'experiment', None, 'experiment type, e.g. retinanet_resnetfpn_coco')
-flags.DEFINE_string('export_dir', None, 'The export directory.')
-flags.DEFINE_string('checkpoint_path', None, 'Checkpoint path.')
-flags.DEFINE_multi_string(
- 'config_file',
- default=None,
- help='YAML/JSON files which specifies overrides. The override order '
- 'follows the order of args. Note that each file '
- 'can be used as an override template to override the default parameters '
- 'specified in Python. If the same parameter is specified in both '
- '`--config_file` and `--params_override`, `config_file` will be used '
- 'first, followed by params_override.')
-flags.DEFINE_string(
- 'params_override', '',
- 'The JSON/YAML file or string which specifies the parameter to be overriden'
- ' on top of `config_file` template.')
-flags.DEFINE_integer(
- 'batch_size', None, 'The batch size.')
-flags.DEFINE_string(
- 'input_type', 'image_tensor',
- 'One of `image_tensor`, `image_bytes`, `tf_example` and `tflite`.')
-flags.DEFINE_string(
- 'input_image_size', '224,224',
- 'The comma-separated string of two integers representing the height,width '
- 'of the input to the model.')
-flags.DEFINE_string('export_checkpoint_subdir', 'checkpoint',
- 'The subdirectory for checkpoints.')
-flags.DEFINE_string('export_saved_model_subdir', 'saved_model',
- 'The subdirectory for saved model.')
-
-
-def main(_):
-
- params = exp_factory.get_exp_config(FLAGS.experiment)
- for config_file in FLAGS.config_file or []:
- params = hyperparams.override_params_dict(
- params, config_file, is_strict=True)
- if FLAGS.params_override:
- params = hyperparams.override_params_dict(
- params, FLAGS.params_override, is_strict=True)
-
- params.validate()
- params.lock()
-
- export_saved_model_lib.export_inference_graph(
- input_type=FLAGS.input_type,
- batch_size=FLAGS.batch_size,
- input_image_size=[int(x) for x in FLAGS.input_image_size.split(',')],
- params=params,
- checkpoint_path=FLAGS.checkpoint_path,
- export_dir=FLAGS.export_dir,
- export_checkpoint_subdir=FLAGS.export_checkpoint_subdir,
- export_saved_model_subdir=FLAGS.export_saved_model_subdir)
-
-
-if __name__ == '__main__':
- app.run(main)
diff --git a/official/vision/beta/serving/export_saved_model_lib.py b/official/vision/beta/serving/export_saved_model_lib.py
deleted file mode 100644
index 01e0e39f364bce617219de5bc9d80f78f422e97f..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/export_saved_model_lib.py
+++ /dev/null
@@ -1,164 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-r"""Vision models export utility function for serving/inference."""
-
-import os
-from typing import Optional, List
-
-from absl import logging
-import tensorflow as tf
-
-from official.core import config_definitions as cfg
-from official.core import export_base
-from official.core import train_utils
-from official.vision.beta import configs
-from official.vision.beta.serving import detection
-from official.vision.beta.serving import image_classification
-from official.vision.beta.serving import semantic_segmentation
-from official.vision.beta.serving import video_classification
-
-
-def export_inference_graph(
- input_type: str,
- batch_size: Optional[int],
- input_image_size: List[int],
- params: cfg.ExperimentConfig,
- checkpoint_path: str,
- export_dir: str,
- num_channels: Optional[int] = 3,
- export_module: Optional[export_base.ExportModule] = None,
- export_checkpoint_subdir: Optional[str] = None,
- export_saved_model_subdir: Optional[str] = None,
- save_options: Optional[tf.saved_model.SaveOptions] = None,
- log_model_flops_and_params: bool = False):
- """Exports inference graph for the model specified in the exp config.
-
- Saved model is stored at export_dir/saved_model, checkpoint is saved
- at export_dir/checkpoint, and params is saved at export_dir/params.yaml.
-
- Args:
- input_type: One of `image_tensor`, `image_bytes`, `tf_example` or `tflite`.
- batch_size: 'int', or None.
- input_image_size: List or Tuple of height and width.
- params: Experiment params.
- checkpoint_path: Trained checkpoint path or directory.
- export_dir: Export directory path.
- num_channels: The number of input image channels.
- export_module: Optional export module to be used instead of using params
- to create one. If None, the params will be used to create an export
- module.
- export_checkpoint_subdir: Optional subdirectory under export_dir
- to store checkpoint.
- export_saved_model_subdir: Optional subdirectory under export_dir
- to store saved model.
- save_options: `SaveOptions` for `tf.saved_model.save`.
- log_model_flops_and_params: If True, writes model FLOPs to model_flops.txt
- and model parameters to model_params.txt.
- """
-
- if export_checkpoint_subdir:
- output_checkpoint_directory = os.path.join(
- export_dir, export_checkpoint_subdir)
- else:
- output_checkpoint_directory = None
-
- if export_saved_model_subdir:
- output_saved_model_directory = os.path.join(
- export_dir, export_saved_model_subdir)
- else:
- output_saved_model_directory = export_dir
-
- # TODO(arashwan): Offers a direct path to use ExportModule with Task objects.
- if not export_module:
- if isinstance(params.task,
- configs.image_classification.ImageClassificationTask):
- export_module = image_classification.ClassificationModule(
- params=params,
- batch_size=batch_size,
- input_image_size=input_image_size,
- input_type=input_type,
- num_channels=num_channels)
- elif isinstance(params.task, configs.retinanet.RetinaNetTask) or isinstance(
- params.task, configs.maskrcnn.MaskRCNNTask):
- export_module = detection.DetectionModule(
- params=params,
- batch_size=batch_size,
- input_image_size=input_image_size,
- input_type=input_type,
- num_channels=num_channels)
- elif isinstance(params.task,
- configs.semantic_segmentation.SemanticSegmentationTask):
- export_module = semantic_segmentation.SegmentationModule(
- params=params,
- batch_size=batch_size,
- input_image_size=input_image_size,
- input_type=input_type,
- num_channels=num_channels)
- elif isinstance(params.task,
- configs.video_classification.VideoClassificationTask):
- export_module = video_classification.VideoClassificationModule(
- params=params,
- batch_size=batch_size,
- input_image_size=input_image_size,
- input_type=input_type,
- num_channels=num_channels)
- else:
- raise ValueError('Export module not implemented for {} task.'.format(
- type(params.task)))
-
- export_base.export(
- export_module,
- function_keys=[input_type],
- export_savedmodel_dir=output_saved_model_directory,
- checkpoint_path=checkpoint_path,
- timestamped=False,
- save_options=save_options)
-
- if output_checkpoint_directory:
- ckpt = tf.train.Checkpoint(model=export_module.model)
- ckpt.save(os.path.join(output_checkpoint_directory, 'ckpt'))
- train_utils.serialize_config(params, export_dir)
-
- if log_model_flops_and_params:
- inputs_kwargs = None
- if isinstance(
- params.task,
- (configs.retinanet.RetinaNetTask, configs.maskrcnn.MaskRCNNTask)):
- # We need to create inputs_kwargs argument to specify the input shapes for
- # subclass model that overrides model.call to take multiple inputs,
- # e.g., RetinaNet model.
- inputs_kwargs = {
- 'images':
- tf.TensorSpec([1] + input_image_size + [num_channels],
- tf.float32),
- 'image_shape':
- tf.TensorSpec([1, 2], tf.float32)
- }
- dummy_inputs = {
- k: tf.ones(v.shape.as_list(), tf.float32)
- for k, v in inputs_kwargs.items()
- }
- # Must do forward pass to build the model.
- export_module.model(**dummy_inputs)
- else:
- logging.info(
- 'Logging model flops and params not implemented for %s task.',
- type(params.task))
- return
- train_utils.try_count_flops(export_module.model, inputs_kwargs,
- os.path.join(export_dir, 'model_flops.txt'))
- train_utils.write_model_params(export_module.model,
- os.path.join(export_dir, 'model_params.txt'))
diff --git a/official/vision/beta/serving/export_saved_model_lib_test.py b/official/vision/beta/serving/export_saved_model_lib_test.py
deleted file mode 100644
index ff65cf7a1d43878876a2204f8d5e25e212af5b84..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/export_saved_model_lib_test.py
+++ /dev/null
@@ -1,69 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for official.core.export_saved_model_lib."""
-
-import os
-from unittest import mock
-
-import tensorflow as tf
-
-from official.core import export_base
-from official.vision.beta import configs
-from official.vision.beta.serving import export_saved_model_lib
-
-
-class WriteModelFlopsAndParamsTest(tf.test.TestCase):
-
- def setUp(self):
- super().setUp()
- self.tempdir = self.create_tempdir()
- self.enter_context(
- mock.patch.object(export_base, 'export', autospec=True, spec_set=True))
-
- def _export_model_with_log_model_flops_and_params(self, params):
- export_saved_model_lib.export_inference_graph(
- input_type='image_tensor',
- batch_size=1,
- input_image_size=[64, 64],
- params=params,
- checkpoint_path=os.path.join(self.tempdir, 'unused-ckpt'),
- export_dir=self.tempdir,
- log_model_flops_and_params=True)
-
- def assertModelAnalysisFilesExist(self):
- self.assertTrue(
- tf.io.gfile.exists(os.path.join(self.tempdir, 'model_params.txt')))
- self.assertTrue(
- tf.io.gfile.exists(os.path.join(self.tempdir, 'model_flops.txt')))
-
- def test_retinanet_task(self):
- params = configs.retinanet.retinanet_resnetfpn_coco()
- params.task.model.backbone.resnet.model_id = 18
- params.task.model.num_classes = 2
- params.task.model.max_level = 6
- self._export_model_with_log_model_flops_and_params(params)
- self.assertModelAnalysisFilesExist()
-
- def test_maskrcnn_task(self):
- params = configs.maskrcnn.maskrcnn_resnetfpn_coco()
- params.task.model.backbone.resnet.model_id = 18
- params.task.model.num_classes = 2
- params.task.model.max_level = 6
- self._export_model_with_log_model_flops_and_params(params)
- self.assertModelAnalysisFilesExist()
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/serving/export_saved_model_lib_v2.py b/official/vision/beta/serving/export_saved_model_lib_v2.py
deleted file mode 100644
index aa9e227788d967f110343e59fdbbba4df5a08378..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/export_saved_model_lib_v2.py
+++ /dev/null
@@ -1,93 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-r"""Vision models export utility function for serving/inference."""
-
-import os
-from typing import Optional, List
-
-import tensorflow as tf
-
-from official.core import config_definitions as cfg
-from official.core import export_base
-from official.core import train_utils
-from official.vision.beta.serving import export_module_factory
-
-
-def export(
- input_type: str,
- batch_size: Optional[int],
- input_image_size: List[int],
- params: cfg.ExperimentConfig,
- checkpoint_path: str,
- export_dir: str,
- num_channels: Optional[int] = 3,
- export_module: Optional[export_base.ExportModule] = None,
- export_checkpoint_subdir: Optional[str] = None,
- export_saved_model_subdir: Optional[str] = None,
- save_options: Optional[tf.saved_model.SaveOptions] = None):
- """Exports the model specified in the exp config.
-
- Saved model is stored at export_dir/saved_model, checkpoint is saved
- at export_dir/checkpoint, and params is saved at export_dir/params.yaml.
-
- Args:
- input_type: One of `image_tensor`, `image_bytes`, `tf_example`.
- batch_size: 'int', or None.
- input_image_size: List or Tuple of height and width.
- params: Experiment params.
- checkpoint_path: Trained checkpoint path or directory.
- export_dir: Export directory path.
- num_channels: The number of input image channels.
- export_module: Optional export module to be used instead of using params
- to create one. If None, the params will be used to create an export
- module.
- export_checkpoint_subdir: Optional subdirectory under export_dir
- to store checkpoint.
- export_saved_model_subdir: Optional subdirectory under export_dir
- to store saved model.
- save_options: `SaveOptions` for `tf.saved_model.save`.
- """
-
- if export_checkpoint_subdir:
- output_checkpoint_directory = os.path.join(
- export_dir, export_checkpoint_subdir)
- else:
- output_checkpoint_directory = None
-
- if export_saved_model_subdir:
- output_saved_model_directory = os.path.join(
- export_dir, export_saved_model_subdir)
- else:
- output_saved_model_directory = export_dir
-
- export_module = export_module_factory.get_export_module(
- params,
- input_type=input_type,
- batch_size=batch_size,
- input_image_size=input_image_size,
- num_channels=num_channels)
-
- export_base.export(
- export_module,
- function_keys=[input_type],
- export_savedmodel_dir=output_saved_model_directory,
- checkpoint_path=checkpoint_path,
- timestamped=False,
- save_options=save_options)
-
- if output_checkpoint_directory:
- ckpt = tf.train.Checkpoint(model=export_module.model)
- ckpt.save(os.path.join(output_checkpoint_directory, 'ckpt'))
- train_utils.serialize_config(params, export_dir)
diff --git a/official/vision/beta/serving/export_tfhub.py b/official/vision/beta/serving/export_tfhub.py
deleted file mode 100644
index 2b123a922e9a74b9fa1d07d1b546ca1a6fbd90f0..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/export_tfhub.py
+++ /dev/null
@@ -1,105 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""A script to export the image classification as a TF-Hub SavedModel."""
-
-# Import libraries
-from absl import app
-from absl import flags
-
-import tensorflow as tf
-
-from official.common import registry_imports # pylint: disable=unused-import
-from official.core import exp_factory
-from official.modeling import hyperparams
-from official.vision.beta.modeling import factory
-
-
-FLAGS = flags.FLAGS
-
-flags.DEFINE_string(
- 'experiment', None, 'experiment type, e.g. resnet_imagenet')
-flags.DEFINE_string(
- 'checkpoint_path', None, 'Checkpoint path.')
-flags.DEFINE_string(
- 'export_path', None, 'The export directory.')
-flags.DEFINE_multi_string(
- 'config_file',
- None,
- 'A YAML/JSON files which specifies overrides. The override order '
- 'follows the order of args. Note that each file '
- 'can be used as an override template to override the default parameters '
- 'specified in Python. If the same parameter is specified in both '
- '`--config_file` and `--params_override`, `config_file` will be used '
- 'first, followed by params_override.')
-flags.DEFINE_string(
- 'params_override', '',
- 'The JSON/YAML file or string which specifies the parameter to be overriden'
- ' on top of `config_file` template.')
-flags.DEFINE_integer(
- 'batch_size', None, 'The batch size.')
-flags.DEFINE_string(
- 'input_image_size',
- '224,224',
- 'The comma-separated string of two integers representing the height,width '
- 'of the input to the model.')
-flags.DEFINE_boolean(
- 'skip_logits_layer',
- False,
- 'Whether to skip the prediction layer and only output the feature vector.')
-
-
-def export_model_to_tfhub(params,
- batch_size,
- input_image_size,
- skip_logits_layer,
- checkpoint_path,
- export_path):
- """Export an image classification model to TF-Hub."""
- input_specs = tf.keras.layers.InputSpec(shape=[batch_size] +
- input_image_size + [3])
-
- model = factory.build_classification_model(
- input_specs=input_specs,
- model_config=params.task.model,
- l2_regularizer=None,
- skip_logits_layer=skip_logits_layer)
- checkpoint = tf.train.Checkpoint(model=model)
- checkpoint.restore(checkpoint_path).assert_existing_objects_matched()
- model.save(export_path, include_optimizer=False, save_format='tf')
-
-
-def main(_):
- params = exp_factory.get_exp_config(FLAGS.experiment)
- for config_file in FLAGS.config_file or []:
- params = hyperparams.override_params_dict(
- params, config_file, is_strict=True)
- if FLAGS.params_override:
- params = hyperparams.override_params_dict(
- params, FLAGS.params_override, is_strict=True)
- params.validate()
- params.lock()
-
- export_model_to_tfhub(
- params=params,
- batch_size=FLAGS.batch_size,
- input_image_size=[int(x) for x in FLAGS.input_image_size.split(',')],
- skip_logits_layer=FLAGS.skip_logits_layer,
- checkpoint_path=FLAGS.checkpoint_path,
- export_path=FLAGS.export_path)
-
-
-if __name__ == '__main__':
- app.run(main)
diff --git a/official/vision/beta/serving/export_tflite.py b/official/vision/beta/serving/export_tflite.py
deleted file mode 100644
index eb1bfd6903a838b9d32308bd87278ad8097fdefa..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/export_tflite.py
+++ /dev/null
@@ -1,108 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-r"""Binary to convert a saved model to tflite model.
-
-It requires a SavedModel exported using export_saved_model.py with batch size 1
-and input type `tflite`, and using the same config file used for exporting saved
-model. It includes optional post-training quantization. When using integer
-quantization, calibration steps need to be provided to calibrate model input.
-
-To convert a SavedModel to a TFLite model:
-
-EXPERIMENT_TYPE = XX
-TFLITE_PATH = XX
-SAVED_MOODEL_DIR = XX
-CONFIG_FILE = XX
-export_tflite --experiment=${EXPERIMENT_TYPE} \
- --saved_model_dir=${SAVED_MOODEL_DIR} \
- --tflite_path=${TFLITE_PATH} \
- --config_file=${CONFIG_FILE} \
- --quant_type=fp16 \
- --calibration_steps=500
-"""
-from absl import app
-from absl import flags
-from absl import logging
-
-import tensorflow as tf
-from official.common import registry_imports # pylint: disable=unused-import
-from official.core import exp_factory
-from official.modeling import hyperparams
-from official.vision.beta.serving import export_tflite_lib
-
-FLAGS = flags.FLAGS
-
-flags.DEFINE_string(
- 'experiment',
- None,
- 'experiment type, e.g. retinanet_resnetfpn_coco',
- required=True)
-flags.DEFINE_multi_string(
- 'config_file',
- default='',
- help='YAML/JSON files which specifies overrides. The override order '
- 'follows the order of args. Note that each file '
- 'can be used as an override template to override the default parameters '
- 'specified in Python. If the same parameter is specified in both '
- '`--config_file` and `--params_override`, `config_file` will be used '
- 'first, followed by params_override.')
-flags.DEFINE_string(
- 'params_override', '',
- 'The JSON/YAML file or string which specifies the parameter to be overriden'
- ' on top of `config_file` template.')
-flags.DEFINE_string(
- 'saved_model_dir', None, 'The directory to the saved model.', required=True)
-flags.DEFINE_string(
- 'tflite_path', None, 'The path to the output tflite model.', required=True)
-flags.DEFINE_string(
- 'quant_type',
- default=None,
- help='Post training quantization type. Support `int8`, `int8_full`, '
- '`fp16`, and `default`. See '
- 'https://www.tensorflow.org/lite/performance/post_training_quantization '
- 'for more details.')
-flags.DEFINE_integer('calibration_steps', 500,
- 'The number of calibration steps for integer model.')
-
-
-def main(_) -> None:
- params = exp_factory.get_exp_config(FLAGS.experiment)
- if FLAGS.config_file is not None:
- for config_file in FLAGS.config_file:
- params = hyperparams.override_params_dict(
- params, config_file, is_strict=True)
- if FLAGS.params_override:
- params = hyperparams.override_params_dict(
- params, FLAGS.params_override, is_strict=True)
-
- params.validate()
- params.lock()
-
- logging.info('Converting SavedModel from %s to TFLite model...',
- FLAGS.saved_model_dir)
- tflite_model = export_tflite_lib.convert_tflite_model(
- saved_model_dir=FLAGS.saved_model_dir,
- quant_type=FLAGS.quant_type,
- params=params,
- calibration_steps=FLAGS.calibration_steps)
-
- with tf.io.gfile.GFile(FLAGS.tflite_path, 'wb') as fw:
- fw.write(tflite_model)
-
- logging.info('TFLite model converted and saved to %s.', FLAGS.tflite_path)
-
-
-if __name__ == '__main__':
- app.run(main)
diff --git a/official/vision/beta/serving/export_tflite_lib.py b/official/vision/beta/serving/export_tflite_lib.py
deleted file mode 100644
index d5535a924d3fe1ebbef7bc6bc6a9d1517222f1f4..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/export_tflite_lib.py
+++ /dev/null
@@ -1,122 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Library to facilitate TFLite model conversion."""
-import functools
-from typing import Iterator, List, Optional
-
-from absl import logging
-import tensorflow as tf
-
-from official.core import config_definitions as cfg
-from official.vision.beta import configs
-from official.vision.beta import tasks
-
-
-def create_representative_dataset(
- params: cfg.ExperimentConfig) -> tf.data.Dataset:
- """Creates a tf.data.Dataset to load images for representative dataset.
-
- Args:
- params: An ExperimentConfig.
-
- Returns:
- A tf.data.Dataset instance.
-
- Raises:
- ValueError: If task is not supported.
- """
- if isinstance(params.task,
- configs.image_classification.ImageClassificationTask):
-
- task = tasks.image_classification.ImageClassificationTask(params.task)
- elif isinstance(params.task, configs.retinanet.RetinaNetTask):
- task = tasks.retinanet.RetinaNetTask(params.task)
- elif isinstance(params.task, configs.maskrcnn.MaskRCNNTask):
- task = tasks.maskrcnn.MaskRCNNTask(params.task)
- elif isinstance(params.task,
- configs.semantic_segmentation.SemanticSegmentationTask):
- task = tasks.semantic_segmentation.SemanticSegmentationTask(params.task)
- else:
- raise ValueError('Task {} not supported.'.format(type(params.task)))
- # Ensure batch size is 1 for TFLite model.
- params.task.train_data.global_batch_size = 1
- params.task.train_data.dtype = 'float32'
- logging.info('Task config: %s', params.task.as_dict())
- return task.build_inputs(params=params.task.train_data)
-
-
-def representative_dataset(
- params: cfg.ExperimentConfig,
- calibration_steps: int = 2000) -> Iterator[List[tf.Tensor]]:
- """"Creates representative dataset for input calibration.
-
- Args:
- params: An ExperimentConfig.
- calibration_steps: The steps to do calibration.
-
- Yields:
- An input image tensor.
- """
- dataset = create_representative_dataset(params=params)
- for image, _ in dataset.take(calibration_steps):
- # Skip images that do not have 3 channels.
- if image.shape[-1] != 3:
- continue
- yield [image]
-
-
-def convert_tflite_model(saved_model_dir: str,
- quant_type: Optional[str] = None,
- params: Optional[cfg.ExperimentConfig] = None,
- calibration_steps: Optional[int] = 2000) -> bytes:
- """Converts and returns a TFLite model.
-
- Args:
- saved_model_dir: The directory to the SavedModel.
- quant_type: The post training quantization (PTQ) method. It can be one of
- `default` (dynamic range), `fp16` (float16), `int8` (integer wih float
- fallback), `int8_full` (integer only) and None (no quantization).
- params: An optional ExperimentConfig to load and preprocess input images to
- do calibration for integer quantization.
- calibration_steps: The steps to do calibration.
-
- Returns:
- A converted TFLite model with optional PTQ.
-
- Raises:
- ValueError: If `representative_dataset_path` is not present if integer
- quantization is requested.
- """
- converter = tf.lite.TFLiteConverter.from_saved_model(saved_model_dir)
- if quant_type:
- if quant_type.startswith('int8'):
- converter.optimizations = [tf.lite.Optimize.DEFAULT]
- converter.representative_dataset = functools.partial(
- representative_dataset,
- params=params,
- calibration_steps=calibration_steps)
- if quant_type == 'int8_full':
- converter.target_spec.supported_ops = [
- tf.lite.OpsSet.TFLITE_BUILTINS_INT8
- ]
- converter.inference_input_type = tf.uint8 # or tf.int8
- converter.inference_output_type = tf.uint8 # or tf.int8
- elif quant_type == 'fp16':
- converter.optimizations = [tf.lite.Optimize.DEFAULT]
- converter.target_spec.supported_types = [tf.float16]
- elif quant_type == 'default':
- converter.optimizations = [tf.lite.Optimize.DEFAULT]
-
- return converter.convert()
diff --git a/official/vision/beta/serving/export_tflite_lib_test.py b/official/vision/beta/serving/export_tflite_lib_test.py
deleted file mode 100644
index 72990b6ba16e94dd47575e5c44ccd41e976a7f8c..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/export_tflite_lib_test.py
+++ /dev/null
@@ -1,152 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Tests for export_tflite_lib."""
-import os
-
-from absl.testing import parameterized
-import tensorflow as tf
-
-from tensorflow.python.distribute import combinations
-from official.common import registry_imports # pylint: disable=unused-import
-from official.core import exp_factory
-from official.vision.beta.dataloaders import tfexample_utils
-from official.vision.beta.serving import detection as detection_serving
-from official.vision.beta.serving import export_tflite_lib
-from official.vision.beta.serving import image_classification as image_classification_serving
-from official.vision.beta.serving import semantic_segmentation as semantic_segmentation_serving
-
-
-class ExportTfliteLibTest(tf.test.TestCase, parameterized.TestCase):
-
- def _create_test_tfrecord(self, tfrecord_file, example, num_samples):
- examples = [example] * num_samples
- tfexample_utils.dump_to_tfrecord(
- record_file=tfrecord_file, tf_examples=examples)
-
- def _export_from_module(self, module, input_type, saved_model_dir):
- signatures = module.get_inference_signatures(
- {input_type: 'serving_default'})
- tf.saved_model.save(module, saved_model_dir, signatures=signatures)
-
- @combinations.generate(
- combinations.combine(
- experiment=['mobilenet_imagenet'],
- quant_type=[None, 'default', 'fp16', 'int8', 'int8_full'],
- input_image_size=[[224, 224]]))
- def test_export_tflite_image_classification(self, experiment, quant_type,
- input_image_size):
- test_tfrecord_file = os.path.join(self.get_temp_dir(), 'cls_test.tfrecord')
- example = tf.train.Example.FromString(
- tfexample_utils.create_classification_example(
- image_height=input_image_size[0], image_width=input_image_size[1]))
- self._create_test_tfrecord(
- tfrecord_file=test_tfrecord_file, example=example, num_samples=10)
- params = exp_factory.get_exp_config(experiment)
- params.task.validation_data.input_path = test_tfrecord_file
- params.task.train_data.input_path = test_tfrecord_file
- temp_dir = self.get_temp_dir()
- module = image_classification_serving.ClassificationModule(
- params=params,
- batch_size=1,
- input_image_size=input_image_size,
- input_type='tflite')
- self._export_from_module(
- module=module,
- input_type='tflite',
- saved_model_dir=os.path.join(temp_dir, 'saved_model'))
-
- tflite_model = export_tflite_lib.convert_tflite_model(
- saved_model_dir=os.path.join(temp_dir, 'saved_model'),
- quant_type=quant_type,
- params=params,
- calibration_steps=5)
-
- self.assertIsInstance(tflite_model, bytes)
-
- @combinations.generate(
- combinations.combine(
- experiment=['retinanet_mobile_coco'],
- quant_type=[None, 'default', 'fp16'],
- input_image_size=[[384, 384]]))
- def test_export_tflite_detection(self, experiment, quant_type,
- input_image_size):
- test_tfrecord_file = os.path.join(self.get_temp_dir(), 'det_test.tfrecord')
- example = tfexample_utils.create_detection_test_example(
- image_height=input_image_size[0],
- image_width=input_image_size[1],
- image_channel=3,
- num_instances=10)
- self._create_test_tfrecord(
- tfrecord_file=test_tfrecord_file, example=example, num_samples=10)
- params = exp_factory.get_exp_config(experiment)
- params.task.validation_data.input_path = test_tfrecord_file
- params.task.train_data.input_path = test_tfrecord_file
- temp_dir = self.get_temp_dir()
- module = detection_serving.DetectionModule(
- params=params,
- batch_size=1,
- input_image_size=input_image_size,
- input_type='tflite')
- self._export_from_module(
- module=module,
- input_type='tflite',
- saved_model_dir=os.path.join(temp_dir, 'saved_model'))
-
- tflite_model = export_tflite_lib.convert_tflite_model(
- saved_model_dir=os.path.join(temp_dir, 'saved_model'),
- quant_type=quant_type,
- params=params,
- calibration_steps=5)
-
- self.assertIsInstance(tflite_model, bytes)
-
- @combinations.generate(
- combinations.combine(
- experiment=['mnv2_deeplabv3_pascal'],
- quant_type=[None, 'default', 'fp16', 'int8', 'int8_full'],
- input_image_size=[[512, 512]]))
- def test_export_tflite_semantic_segmentation(self, experiment, quant_type,
- input_image_size):
- test_tfrecord_file = os.path.join(self.get_temp_dir(), 'seg_test.tfrecord')
- example = tfexample_utils.create_segmentation_test_example(
- image_height=input_image_size[0],
- image_width=input_image_size[1],
- image_channel=3)
- self._create_test_tfrecord(
- tfrecord_file=test_tfrecord_file, example=example, num_samples=10)
- params = exp_factory.get_exp_config(experiment)
- params.task.validation_data.input_path = test_tfrecord_file
- params.task.train_data.input_path = test_tfrecord_file
- temp_dir = self.get_temp_dir()
- module = semantic_segmentation_serving.SegmentationModule(
- params=params,
- batch_size=1,
- input_image_size=input_image_size,
- input_type='tflite')
- self._export_from_module(
- module=module,
- input_type='tflite',
- saved_model_dir=os.path.join(temp_dir, 'saved_model'))
-
- tflite_model = export_tflite_lib.convert_tflite_model(
- saved_model_dir=os.path.join(temp_dir, 'saved_model'),
- quant_type=quant_type,
- params=params,
- calibration_steps=5)
-
- self.assertIsInstance(tflite_model, bytes)
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/serving/export_utils.py b/official/vision/beta/serving/export_utils.py
deleted file mode 100644
index 5c9c5ea5e21487b3a7ad284a0033769ae24d0c3b..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/export_utils.py
+++ /dev/null
@@ -1,121 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Helper utils for export library."""
-
-from typing import List, Optional
-import tensorflow as tf
-
-# pylint: disable=g-long-lambda
-
-
-def get_image_input_signatures(input_type: str,
- batch_size: Optional[int],
- input_image_size: List[int],
- num_channels: int = 3):
- """Gets input signatures for an image.
-
- Args:
- input_type: A `str`, can be either tf_example, image_bytes, or image_tensor.
- batch_size: `int` for batch size or None.
- input_image_size: List[int] for the height and width of the input image.
- num_channels: `int` for number of channels in the input image.
- Returns:
- tf.TensorSpec of the input tensor.
- """
- if input_type == 'image_tensor':
- input_signature = tf.TensorSpec(
- shape=[batch_size] + [None] * len(input_image_size) + [num_channels],
- dtype=tf.uint8)
- elif input_type in ['image_bytes', 'serve_examples', 'tf_example']:
- input_signature = tf.TensorSpec(shape=[batch_size], dtype=tf.string)
- elif input_type == 'tflite':
- input_signature = tf.TensorSpec(
- shape=[1] + input_image_size + [num_channels], dtype=tf.float32)
- else:
- raise ValueError('Unrecognized `input_type`')
- return input_signature
-
-
-def decode_image(encoded_image_bytes: str,
- input_image_size: List[int],
- num_channels: int = 3,) -> tf.Tensor:
- """Decodes an image bytes to an image tensor.
-
- Use `tf.image.decode_image` to decode an image if input is expected to be 2D
- image; otherwise use `tf.io.decode_raw` to convert the raw bytes to tensor
- and reshape it to desire shape.
-
- Args:
- encoded_image_bytes: An encoded image string to be decoded.
- input_image_size: List[int] for the desired input size. This will be used to
- infer whether the image is 2d or 3d.
- num_channels: `int` for number of image channels.
-
- Returns:
- A decoded image tensor.
- """
- if len(input_image_size) == 2:
- # Decode an image if 2D input is expected.
- image_tensor = tf.image.decode_image(
- encoded_image_bytes, channels=num_channels)
- else:
- # Convert raw bytes into a tensor and reshape it, if not 2D input.
- image_tensor = tf.io.decode_raw(encoded_image_bytes, out_type=tf.uint8)
- image_tensor.set_shape([None] * len(input_image_size) + [num_channels])
- return image_tensor
-
-
-def decode_image_tf_example(tf_example_string_tensor: tf.train.Example,
- input_image_size: List[int],
- num_channels: int = 3,
- encoded_key: str = 'image/encoded'
- ) -> tf.Tensor:
- """Decodes a TF Example to an image tensor."""
-
- keys_to_features = {
- encoded_key: tf.io.FixedLenFeature((), tf.string, default_value=''),
- }
- parsed_tensors = tf.io.parse_single_example(
- serialized=tf_example_string_tensor, features=keys_to_features)
- image_tensor = decode_image(
- parsed_tensors[encoded_key],
- input_image_size=input_image_size,
- num_channels=num_channels)
- return image_tensor
-
-
-def parse_image(
- inputs, input_type: str, input_image_size: List[int], num_channels: int):
- """Parses image."""
- if input_type in ['tf_example', 'serve_examples']:
- decode_image_tf_example_fn = (
- lambda x: decode_image_tf_example(x, input_image_size, num_channels))
- image_tensor = tf.map_fn(
- decode_image_tf_example_fn,
- elems=inputs,
- fn_output_signature=tf.TensorSpec(
- shape=[None] * len(input_image_size) + [num_channels],
- dtype=tf.uint8),
- )
- elif input_type == 'image_bytes':
- decode_image_fn = lambda x: decode_image(x, input_image_size, num_channels)
- image_tensor = tf.map_fn(
- decode_image_fn, elems=inputs,
- fn_output_signature=tf.TensorSpec(
- shape=[None] * len(input_image_size) + [num_channels],
- dtype=tf.uint8),)
- else:
- image_tensor = inputs
- return image_tensor
diff --git a/official/vision/beta/serving/image_classification.py b/official/vision/beta/serving/image_classification.py
deleted file mode 100644
index 0b289580c4fa134573951c0f4c6202fe8742e33b..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/image_classification.py
+++ /dev/null
@@ -1,84 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Image classification input and model functions for serving/inference."""
-
-import tensorflow as tf
-
-from official.vision.beta.modeling import factory
-from official.vision.beta.ops import preprocess_ops
-from official.vision.beta.serving import export_base
-
-
-MEAN_RGB = (0.485 * 255, 0.456 * 255, 0.406 * 255)
-STDDEV_RGB = (0.229 * 255, 0.224 * 255, 0.225 * 255)
-
-
-class ClassificationModule(export_base.ExportModule):
- """classification Module."""
-
- def _build_model(self):
- input_specs = tf.keras.layers.InputSpec(
- shape=[self._batch_size] + self._input_image_size + [3])
-
- return factory.build_classification_model(
- input_specs=input_specs,
- model_config=self.params.task.model,
- l2_regularizer=None)
-
- def _build_inputs(self, image):
- """Builds classification model inputs for serving."""
- # Center crops and resizes image.
- image = preprocess_ops.center_crop_image(image)
-
- image = tf.image.resize(
- image, self._input_image_size, method=tf.image.ResizeMethod.BILINEAR)
-
- image = tf.reshape(
- image, [self._input_image_size[0], self._input_image_size[1], 3])
-
- # Normalizes image with mean and std pixel values.
- image = preprocess_ops.normalize_image(image,
- offset=MEAN_RGB,
- scale=STDDEV_RGB)
- return image
-
- def serve(self, images):
- """Cast image to float and run inference.
-
- Args:
- images: uint8 Tensor of shape [batch_size, None, None, 3]
- Returns:
- Tensor holding classification output logits.
- """
- # Skip image preprocessing when input_type is tflite so it is compatible
- # with TFLite quantization.
- if self._input_type != 'tflite':
- with tf.device('cpu:0'):
- images = tf.cast(images, dtype=tf.float32)
-
- images = tf.nest.map_structure(
- tf.identity,
- tf.map_fn(
- self._build_inputs,
- elems=images,
- fn_output_signature=tf.TensorSpec(
- shape=self._input_image_size + [3], dtype=tf.float32),
- parallel_iterations=32))
-
- logits = self.inference_step(images)
- probs = tf.nn.softmax(logits)
-
- return {'logits': logits, 'probs': probs}
diff --git a/official/vision/beta/serving/image_classification_test.py b/official/vision/beta/serving/image_classification_test.py
deleted file mode 100644
index 38218d7a74ad7612075f895246d88993b76afe8d..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/image_classification_test.py
+++ /dev/null
@@ -1,121 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Test for image classification export lib."""
-
-import io
-import os
-
-from absl.testing import parameterized
-import numpy as np
-from PIL import Image
-import tensorflow as tf
-
-from official.common import registry_imports # pylint: disable=unused-import
-from official.core import exp_factory
-from official.vision.beta.serving import image_classification
-
-
-class ImageClassificationExportTest(tf.test.TestCase, parameterized.TestCase):
-
- def _get_classification_module(self, input_type):
- params = exp_factory.get_exp_config('resnet_imagenet')
- params.task.model.backbone.resnet.model_id = 18
- classification_module = image_classification.ClassificationModule(
- params,
- batch_size=1,
- input_image_size=[224, 224],
- input_type=input_type)
- return classification_module
-
- def _export_from_module(self, module, input_type, save_directory):
- signatures = module.get_inference_signatures(
- {input_type: 'serving_default'})
- tf.saved_model.save(module,
- save_directory,
- signatures=signatures)
-
- def _get_dummy_input(self, input_type):
- """Get dummy input for the given input type."""
-
- if input_type == 'image_tensor':
- return tf.zeros((1, 224, 224, 3), dtype=np.uint8)
- elif input_type == 'image_bytes':
- image = Image.fromarray(np.zeros((224, 224, 3), dtype=np.uint8))
- byte_io = io.BytesIO()
- image.save(byte_io, 'PNG')
- return [byte_io.getvalue()]
- elif input_type == 'tf_example':
- image_tensor = tf.zeros((224, 224, 3), dtype=tf.uint8)
- encoded_jpeg = tf.image.encode_jpeg(tf.constant(image_tensor)).numpy()
- example = tf.train.Example(
- features=tf.train.Features(
- feature={
- 'image/encoded':
- tf.train.Feature(
- bytes_list=tf.train.BytesList(value=[encoded_jpeg])),
- })).SerializeToString()
- return [example]
- elif input_type == 'tflite':
- return tf.zeros((1, 224, 224, 3), dtype=np.float32)
-
- @parameterized.parameters(
- {'input_type': 'image_tensor'},
- {'input_type': 'image_bytes'},
- {'input_type': 'tf_example'},
- {'input_type': 'tflite'},
- )
- def test_export(self, input_type='image_tensor'):
- tmp_dir = self.get_temp_dir()
- module = self._get_classification_module(input_type)
- # Test that the model restores any attrs that are trackable objects
- # (eg: tables, resource variables, keras models/layers, tf.hub modules).
- module.model.test_trackable = tf.keras.layers.InputLayer(input_shape=(4,))
-
- self._export_from_module(module, input_type, tmp_dir)
-
- self.assertTrue(os.path.exists(os.path.join(tmp_dir, 'saved_model.pb')))
- self.assertTrue(os.path.exists(
- os.path.join(tmp_dir, 'variables', 'variables.index')))
- self.assertTrue(os.path.exists(
- os.path.join(tmp_dir, 'variables', 'variables.data-00000-of-00001')))
-
- imported = tf.saved_model.load(tmp_dir)
- classification_fn = imported.signatures['serving_default']
-
- images = self._get_dummy_input(input_type)
- if input_type != 'tflite':
- processed_images = tf.nest.map_structure(
- tf.stop_gradient,
- tf.map_fn(
- module._build_inputs,
- elems=tf.zeros((1, 224, 224, 3), dtype=tf.uint8),
- fn_output_signature=tf.TensorSpec(
- shape=[224, 224, 3], dtype=tf.float32)))
- else:
- processed_images = images
- expected_logits = module.model(processed_images, training=False)
- expected_prob = tf.nn.softmax(expected_logits)
- out = classification_fn(tf.constant(images))
-
- # The imported model should contain any trackable attrs that the original
- # model had.
- self.assertTrue(hasattr(imported.model, 'test_trackable'))
- self.assertAllClose(out['logits'].numpy(), expected_logits.numpy())
- self.assertAllClose(out['probs'].numpy(), expected_prob.numpy())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/serving/semantic_segmentation.py b/official/vision/beta/serving/semantic_segmentation.py
deleted file mode 100644
index bf923f967c0d32fc32ba0b49ee656c7ff30ae9f7..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/semantic_segmentation.py
+++ /dev/null
@@ -1,90 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Semantic segmentation input and model functions for serving/inference."""
-
-import tensorflow as tf
-
-from official.vision.beta.modeling import factory
-from official.vision.beta.ops import preprocess_ops
-from official.vision.beta.serving import export_base
-
-
-MEAN_RGB = (0.485 * 255, 0.456 * 255, 0.406 * 255)
-STDDEV_RGB = (0.229 * 255, 0.224 * 255, 0.225 * 255)
-
-
-class SegmentationModule(export_base.ExportModule):
- """Segmentation Module."""
-
- def _build_model(self):
- input_specs = tf.keras.layers.InputSpec(
- shape=[self._batch_size] + self._input_image_size + [3])
-
- return factory.build_segmentation_model(
- input_specs=input_specs,
- model_config=self.params.task.model,
- l2_regularizer=None)
-
- def _build_inputs(self, image):
- """Builds classification model inputs for serving."""
-
- # Normalizes image with mean and std pixel values.
- image = preprocess_ops.normalize_image(image,
- offset=MEAN_RGB,
- scale=STDDEV_RGB)
-
- image, image_info = preprocess_ops.resize_and_crop_image(
- image,
- self._input_image_size,
- padded_size=self._input_image_size,
- aug_scale_min=1.0,
- aug_scale_max=1.0)
- return image, image_info
-
- def serve(self, images):
- """Cast image to float and run inference.
-
- Args:
- images: uint8 Tensor of shape [batch_size, None, None, 3]
- Returns:
- Tensor holding classification output logits.
- """
- # Skip image preprocessing when input_type is tflite so it is compatible
- # with TFLite quantization.
- image_info = None
- if self._input_type != 'tflite':
- with tf.device('cpu:0'):
- images = tf.cast(images, dtype=tf.float32)
- images_spec = tf.TensorSpec(
- shape=self._input_image_size + [3], dtype=tf.float32)
- image_info_spec = tf.TensorSpec(shape=[4, 2], dtype=tf.float32)
-
- images, image_info = tf.nest.map_structure(
- tf.identity,
- tf.map_fn(
- self._build_inputs,
- elems=images,
- fn_output_signature=(images_spec, image_info_spec),
- parallel_iterations=32))
-
- outputs = self.inference_step(images)
- outputs['logits'] = tf.image.resize(
- outputs['logits'], self._input_image_size, method='bilinear')
-
- if image_info is not None:
- outputs.update({'image_info': image_info})
-
- return outputs
diff --git a/official/vision/beta/serving/semantic_segmentation_test.py b/official/vision/beta/serving/semantic_segmentation_test.py
deleted file mode 100644
index 73c302ace4b4423a1afdcf51af147fd503f7347a..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/semantic_segmentation_test.py
+++ /dev/null
@@ -1,115 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Test for semantic segmentation export lib."""
-
-import io
-import os
-
-from absl.testing import parameterized
-import numpy as np
-from PIL import Image
-import tensorflow as tf
-
-from official.common import registry_imports # pylint: disable=unused-import
-from official.core import exp_factory
-from official.vision.beta.serving import semantic_segmentation
-
-
-class SemanticSegmentationExportTest(tf.test.TestCase, parameterized.TestCase):
-
- def _get_segmentation_module(self, input_type):
- params = exp_factory.get_exp_config('mnv2_deeplabv3_pascal')
- segmentation_module = semantic_segmentation.SegmentationModule(
- params,
- batch_size=1,
- input_image_size=[112, 112],
- input_type=input_type)
- return segmentation_module
-
- def _export_from_module(self, module, input_type, save_directory):
- signatures = module.get_inference_signatures(
- {input_type: 'serving_default'})
- tf.saved_model.save(module, save_directory, signatures=signatures)
-
- def _get_dummy_input(self, input_type):
- """Get dummy input for the given input type."""
-
- if input_type == 'image_tensor':
- return tf.zeros((1, 112, 112, 3), dtype=np.uint8)
- elif input_type == 'image_bytes':
- image = Image.fromarray(np.zeros((112, 112, 3), dtype=np.uint8))
- byte_io = io.BytesIO()
- image.save(byte_io, 'PNG')
- return [byte_io.getvalue()]
- elif input_type == 'tf_example':
- image_tensor = tf.zeros((112, 112, 3), dtype=tf.uint8)
- encoded_jpeg = tf.image.encode_jpeg(tf.constant(image_tensor)).numpy()
- example = tf.train.Example(
- features=tf.train.Features(
- feature={
- 'image/encoded':
- tf.train.Feature(
- bytes_list=tf.train.BytesList(value=[encoded_jpeg])),
- })).SerializeToString()
- return [example]
- elif input_type == 'tflite':
- return tf.zeros((1, 112, 112, 3), dtype=np.float32)
-
- @parameterized.parameters(
- {'input_type': 'image_tensor'},
- {'input_type': 'image_bytes'},
- {'input_type': 'tf_example'},
- {'input_type': 'tflite'},
- )
- def test_export(self, input_type='image_tensor'):
- tmp_dir = self.get_temp_dir()
- module = self._get_segmentation_module(input_type)
-
- self._export_from_module(module, input_type, tmp_dir)
-
- self.assertTrue(os.path.exists(os.path.join(tmp_dir, 'saved_model.pb')))
- self.assertTrue(
- os.path.exists(os.path.join(tmp_dir, 'variables', 'variables.index')))
- self.assertTrue(
- os.path.exists(
- os.path.join(tmp_dir, 'variables',
- 'variables.data-00000-of-00001')))
-
- imported = tf.saved_model.load(tmp_dir)
- segmentation_fn = imported.signatures['serving_default']
-
- images = self._get_dummy_input(input_type)
- if input_type != 'tflite':
- processed_images, _ = tf.nest.map_structure(
- tf.stop_gradient,
- tf.map_fn(
- module._build_inputs,
- elems=tf.zeros((1, 112, 112, 3), dtype=tf.uint8),
- fn_output_signature=(tf.TensorSpec(
- shape=[112, 112, 3], dtype=tf.float32),
- tf.TensorSpec(
- shape=[4, 2], dtype=tf.float32))))
- else:
- processed_images = images
- expected_output = tf.image.resize(
- module.model(processed_images, training=False)['logits'], [112, 112],
- method='bilinear')
- out = segmentation_fn(tf.constant(images))
- self.assertAllClose(out['logits'].numpy(), expected_output.numpy())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/serving/video_classification.py b/official/vision/beta/serving/video_classification.py
deleted file mode 100644
index 2de5b9a3e4e9f0c510755c5b08d4d4ff6623175c..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/video_classification.py
+++ /dev/null
@@ -1,191 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Video classification input and model functions for serving/inference."""
-from typing import Mapping, Dict, Text
-
-import tensorflow as tf
-
-from official.vision.beta.dataloaders import video_input
-from official.vision.beta.serving import export_base
-from official.vision.beta.tasks import video_classification
-
-MEAN_RGB = (0.485 * 255, 0.456 * 255, 0.406 * 255)
-STDDEV_RGB = (0.229 * 255, 0.224 * 255, 0.225 * 255)
-
-
-class VideoClassificationModule(export_base.ExportModule):
- """Video classification Module."""
-
- def _build_model(self):
- input_params = self.params.task.train_data
- self._num_frames = input_params.feature_shape[0]
- self._stride = input_params.temporal_stride
- self._min_resize = input_params.min_image_size
- self._crop_size = input_params.feature_shape[1]
-
- self._output_audio = input_params.output_audio
- task = video_classification.VideoClassificationTask(self.params.task)
- return task.build_model()
-
- def _decode_tf_example(self, encoded_inputs: tf.Tensor):
- sequence_description = {
- # Each image is a string encoding JPEG.
- video_input.IMAGE_KEY:
- tf.io.FixedLenSequenceFeature((), tf.string),
- }
- if self._output_audio:
- sequence_description[self._params.task.validation_data.audio_feature] = (
- tf.io.VarLenFeature(dtype=tf.float32))
- _, decoded_tensors = tf.io.parse_single_sequence_example(
- encoded_inputs, {}, sequence_description)
- for key, value in decoded_tensors.items():
- if isinstance(value, tf.SparseTensor):
- decoded_tensors[key] = tf.sparse.to_dense(value)
- return decoded_tensors
-
- def _preprocess_image(self, image):
- image = video_input.process_image(
- image=image,
- is_training=False,
- num_frames=self._num_frames,
- stride=self._stride,
- num_test_clips=1,
- min_resize=self._min_resize,
- crop_size=self._crop_size,
- num_crops=1)
- image = tf.cast(image, tf.float32) # Use config.
- features = {'image': image}
- return features
-
- def _preprocess_audio(self, audio):
- features = {}
- audio = tf.cast(audio, dtype=tf.float32) # Use config.
- audio = video_input.preprocess_ops_3d.sample_sequence(
- audio, 20, random=False, stride=1)
- audio = tf.ensure_shape(
- audio, self._params.task.validation_data.audio_feature_shape)
- features['audio'] = audio
- return features
-
- @tf.function
- def inference_from_tf_example(
- self, encoded_inputs: tf.Tensor) -> Mapping[str, tf.Tensor]:
- with tf.device('cpu:0'):
- if self._output_audio:
- inputs = tf.map_fn(
- self._decode_tf_example, (encoded_inputs),
- fn_output_signature={
- video_input.IMAGE_KEY: tf.string,
- self._params.task.validation_data.audio_feature: tf.float32
- })
- return self.serve(inputs['image'], inputs['audio'])
- else:
- inputs = tf.map_fn(
- self._decode_tf_example, (encoded_inputs),
- fn_output_signature={
- video_input.IMAGE_KEY: tf.string,
- })
- return self.serve(inputs[video_input.IMAGE_KEY], tf.zeros([1, 1]))
-
- @tf.function
- def inference_from_image_tensors(
- self, input_frames: tf.Tensor) -> Mapping[str, tf.Tensor]:
- return self.serve(input_frames, tf.zeros([1, 1]))
-
- @tf.function
- def inference_from_image_audio_tensors(
- self, input_frames: tf.Tensor,
- input_audio: tf.Tensor) -> Mapping[str, tf.Tensor]:
- return self.serve(input_frames, input_audio)
-
- @tf.function
- def inference_from_image_bytes(self, inputs: tf.Tensor):
- raise NotImplementedError(
- 'Video classification do not support image bytes input.')
-
- def serve(self, input_frames: tf.Tensor, input_audio: tf.Tensor):
- """Cast image to float and run inference.
-
- Args:
- input_frames: uint8 Tensor of shape [batch_size, None, None, 3]
- input_audio: float32
-
- Returns:
- Tensor holding classification output logits.
- """
- with tf.device('cpu:0'):
- inputs = tf.map_fn(
- self._preprocess_image, (input_frames),
- fn_output_signature={
- 'image': tf.float32,
- })
- if self._output_audio:
- inputs.update(
- tf.map_fn(
- self._preprocess_audio, (input_audio),
- fn_output_signature={'audio': tf.float32}))
- logits = self.inference_step(inputs)
- if self.params.task.train_data.is_multilabel:
- probs = tf.math.sigmoid(logits)
- else:
- probs = tf.nn.softmax(logits)
- return {'logits': logits, 'probs': probs}
-
- def get_inference_signatures(self, function_keys: Dict[Text, Text]):
- """Gets defined function signatures.
-
- Args:
- function_keys: A dictionary with keys as the function to create signature
- for and values as the signature keys when returns.
-
- Returns:
- A dictionary with key as signature key and value as concrete functions
- that can be used for tf.saved_model.save.
- """
- signatures = {}
- for key, def_name in function_keys.items():
- if key == 'image_tensor':
- input_signature = tf.TensorSpec(
- shape=[self._batch_size] + self._input_image_size + [3],
- dtype=tf.uint8,
- name='INPUT_FRAMES')
- signatures[
- def_name] = self.inference_from_image_tensors.get_concrete_function(
- input_signature)
- elif key == 'frames_audio':
- input_signature = [
- tf.TensorSpec(
- shape=[self._batch_size] + self._input_image_size + [3],
- dtype=tf.uint8,
- name='INPUT_FRAMES'),
- tf.TensorSpec(
- shape=[self._batch_size] +
- self.params.task.train_data.audio_feature_shape,
- dtype=tf.float32,
- name='INPUT_AUDIO')
- ]
- signatures[
- def_name] = self.inference_from_image_audio_tensors.get_concrete_function(
- input_signature)
- elif key == 'serve_examples' or key == 'tf_example':
- input_signature = tf.TensorSpec(
- shape=[self._batch_size], dtype=tf.string)
- signatures[
- def_name] = self.inference_from_tf_example.get_concrete_function(
- input_signature)
- else:
- raise ValueError('Unrecognized `input_type`')
- return signatures
diff --git a/official/vision/beta/serving/video_classification_test.py b/official/vision/beta/serving/video_classification_test.py
deleted file mode 100644
index 4acb73f89a762c2b56982d79d9f83ebe0f8c915c..0000000000000000000000000000000000000000
--- a/official/vision/beta/serving/video_classification_test.py
+++ /dev/null
@@ -1,114 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-
-# import io
-import os
-import random
-
-from absl.testing import parameterized
-import numpy as np
-import tensorflow as tf
-
-from official.common import registry_imports # pylint: disable=unused-import
-from official.core import exp_factory
-from official.vision.beta.dataloaders import tfexample_utils
-from official.vision.beta.serving import video_classification
-
-
-class VideoClassificationTest(tf.test.TestCase, parameterized.TestCase):
-
- def _get_classification_module(self):
- params = exp_factory.get_exp_config('video_classification_ucf101')
- params.task.train_data.feature_shape = (8, 64, 64, 3)
- params.task.validation_data.feature_shape = (8, 64, 64, 3)
- params.task.model.backbone.resnet_3d.model_id = 50
- classification_module = video_classification.VideoClassificationModule(
- params, batch_size=1, input_image_size=[8, 64, 64])
- return classification_module
-
- def _export_from_module(self, module, input_type, save_directory):
- signatures = module.get_inference_signatures(
- {input_type: 'serving_default'})
- tf.saved_model.save(module, save_directory, signatures=signatures)
-
- def _get_dummy_input(self, input_type, module=None):
- """Get dummy input for the given input type."""
-
- if input_type == 'image_tensor':
- images = np.random.randint(
- low=0, high=255, size=(1, 8, 64, 64, 3), dtype=np.uint8)
- # images = np.zeros((1, 8, 64, 64, 3), dtype=np.uint8)
- return images, images
- elif input_type == 'tf_example':
- example = tfexample_utils.make_video_test_example(
- image_shape=(64, 64, 3),
- audio_shape=(20, 128),
- label=random.randint(0, 100)).SerializeToString()
- images = tf.nest.map_structure(
- tf.stop_gradient,
- tf.map_fn(
- module._decode_tf_example,
- elems=tf.constant([example]),
- fn_output_signature={
- video_classification.video_input.IMAGE_KEY: tf.string,
- }))
- images = images[video_classification.video_input.IMAGE_KEY]
- return [example], images
- else:
- raise ValueError(f'{input_type}')
-
- @parameterized.parameters(
- {'input_type': 'image_tensor'},
- {'input_type': 'tf_example'},
- )
- def test_export(self, input_type):
- tmp_dir = self.get_temp_dir()
- module = self._get_classification_module()
-
- self._export_from_module(module, input_type, tmp_dir)
-
- self.assertTrue(os.path.exists(os.path.join(tmp_dir, 'saved_model.pb')))
- self.assertTrue(
- os.path.exists(os.path.join(tmp_dir, 'variables', 'variables.index')))
- self.assertTrue(
- os.path.exists(
- os.path.join(tmp_dir, 'variables',
- 'variables.data-00000-of-00001')))
-
- imported = tf.saved_model.load(tmp_dir)
- classification_fn = imported.signatures['serving_default']
-
- images, images_tensor = self._get_dummy_input(input_type, module)
- processed_images = tf.nest.map_structure(
- tf.stop_gradient,
- tf.map_fn(
- module._preprocess_image,
- elems=images_tensor,
- fn_output_signature={
- 'image': tf.float32,
- }))
- expected_logits = module.model(processed_images, training=False)
- expected_prob = tf.nn.softmax(expected_logits)
- out = classification_fn(tf.constant(images))
-
- # The imported model should contain any trackable attrs that the original
- # model had.
- self.assertAllClose(out['logits'].numpy(), expected_logits.numpy())
- self.assertAllClose(out['probs'].numpy(), expected_prob.numpy())
-
-
-if __name__ == '__main__':
- tf.test.main()
diff --git a/official/vision/beta/tasks/__init__.py b/official/vision/beta/tasks/__init__.py
deleted file mode 100644
index ce1239217be8c28da640b261c817b1c06fd1f0d7..0000000000000000000000000000000000000000
--- a/official/vision/beta/tasks/__init__.py
+++ /dev/null
@@ -1,22 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""Tasks package definition."""
-
-from official.vision.beta.tasks import image_classification
-from official.vision.beta.tasks import maskrcnn
-from official.vision.beta.tasks import retinanet
-from official.vision.beta.tasks import semantic_segmentation
-from official.vision.beta.tasks import video_classification
diff --git a/official/vision/beta/tasks/image_classification.py b/official/vision/beta/tasks/image_classification.py
deleted file mode 100644
index 748e9ab0484122b921c828853248b2528567fcf9..0000000000000000000000000000000000000000
--- a/official/vision/beta/tasks/image_classification.py
+++ /dev/null
@@ -1,312 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Image classification task definition."""
-from typing import Any, Optional, List, Tuple
-from absl import logging
-import tensorflow as tf
-
-from official.common import dataset_fn
-from official.core import base_task
-from official.core import task_factory
-from official.modeling import tf_utils
-from official.vision.beta.configs import image_classification as exp_cfg
-from official.vision.beta.dataloaders import classification_input
-from official.vision.beta.dataloaders import input_reader_factory
-from official.vision.beta.dataloaders import tfds_factory
-from official.vision.beta.modeling import factory
-from official.vision.beta.ops import augment
-
-
-@task_factory.register_task_cls(exp_cfg.ImageClassificationTask)
-class ImageClassificationTask(base_task.Task):
- """A task for image classification."""
-
- def build_model(self):
- """Builds classification model."""
- input_specs = tf.keras.layers.InputSpec(
- shape=[None] + self.task_config.model.input_size)
-
- l2_weight_decay = self.task_config.losses.l2_weight_decay
- # Divide weight decay by 2.0 to match the implementation of tf.nn.l2_loss.
- # (https://www.tensorflow.org/api_docs/python/tf/keras/regularizers/l2)
- # (https://www.tensorflow.org/api_docs/python/tf/nn/l2_loss)
- l2_regularizer = (tf.keras.regularizers.l2(
- l2_weight_decay / 2.0) if l2_weight_decay else None)
-
- model = factory.build_classification_model(
- input_specs=input_specs,
- model_config=self.task_config.model,
- l2_regularizer=l2_regularizer)
- return model
-
- def initialize(self, model: tf.keras.Model):
- """Loads pretrained checkpoint."""
- if not self.task_config.init_checkpoint:
- return
-
- ckpt_dir_or_file = self.task_config.init_checkpoint
- if tf.io.gfile.isdir(ckpt_dir_or_file):
- ckpt_dir_or_file = tf.train.latest_checkpoint(ckpt_dir_or_file)
-
- # Restoring checkpoint.
- if self.task_config.init_checkpoint_modules == 'all':
- ckpt = tf.train.Checkpoint(model=model)
- status = ckpt.read(ckpt_dir_or_file)
- status.expect_partial().assert_existing_objects_matched()
- elif self.task_config.init_checkpoint_modules == 'backbone':
- ckpt = tf.train.Checkpoint(backbone=model.backbone)
- status = ckpt.read(ckpt_dir_or_file)
- status.expect_partial().assert_existing_objects_matched()
- else:
- raise ValueError(
- "Only 'all' or 'backbone' can be used to initialize the model.")
-
- logging.info('Finished loading pretrained checkpoint from %s',
- ckpt_dir_or_file)
-
- def build_inputs(
- self,
- params: exp_cfg.DataConfig,
- input_context: Optional[tf.distribute.InputContext] = None
- ) -> tf.data.Dataset:
- """Builds classification input."""
-
- num_classes = self.task_config.model.num_classes
- input_size = self.task_config.model.input_size
- image_field_key = self.task_config.train_data.image_field_key
- label_field_key = self.task_config.train_data.label_field_key
- is_multilabel = self.task_config.train_data.is_multilabel
-
- if params.tfds_name:
- decoder = tfds_factory.get_classification_decoder(params.tfds_name)
- else:
- decoder = classification_input.Decoder(
- image_field_key=image_field_key, label_field_key=label_field_key,
- is_multilabel=is_multilabel)
-
- parser = classification_input.Parser(
- output_size=input_size[:2],
- num_classes=num_classes,
- image_field_key=image_field_key,
- label_field_key=label_field_key,
- decode_jpeg_only=params.decode_jpeg_only,
- aug_rand_hflip=params.aug_rand_hflip,
- aug_type=params.aug_type,
- color_jitter=params.color_jitter,
- random_erasing=params.random_erasing,
- is_multilabel=is_multilabel,
- dtype=params.dtype)
-
- postprocess_fn = None
- if params.mixup_and_cutmix:
- postprocess_fn = augment.MixupAndCutmix(
- mixup_alpha=params.mixup_and_cutmix.mixup_alpha,
- cutmix_alpha=params.mixup_and_cutmix.cutmix_alpha,
- prob=params.mixup_and_cutmix.prob,
- label_smoothing=params.mixup_and_cutmix.label_smoothing,
- num_classes=num_classes)
-
- reader = input_reader_factory.input_reader_generator(
- params,
- dataset_fn=dataset_fn.pick_dataset_fn(params.file_type),
- decoder_fn=decoder.decode,
- parser_fn=parser.parse_fn(params.is_training),
- postprocess_fn=postprocess_fn)
-
- dataset = reader.read(input_context=input_context)
-
- return dataset
-
- def build_losses(self,
- labels: tf.Tensor,
- model_outputs: tf.Tensor,
- aux_losses: Optional[Any] = None) -> tf.Tensor:
- """Builds sparse categorical cross entropy loss.
-
- Args:
- labels: Input groundtruth labels.
- model_outputs: Output logits of the classifier.
- aux_losses: The auxiliarly loss tensors, i.e. `losses` in tf.keras.Model.
-
- Returns:
- The total loss tensor.
- """
- losses_config = self.task_config.losses
- is_multilabel = self.task_config.train_data.is_multilabel
-
- if not is_multilabel:
- if losses_config.one_hot:
- total_loss = tf.keras.losses.categorical_crossentropy(
- labels,
- model_outputs,
- from_logits=True,
- label_smoothing=losses_config.label_smoothing)
- elif losses_config.soft_labels:
- total_loss = tf.nn.softmax_cross_entropy_with_logits(
- labels, model_outputs)
- else:
- total_loss = tf.keras.losses.sparse_categorical_crossentropy(
- labels, model_outputs, from_logits=True)
- else:
- # Multi-label weighted binary cross entropy loss.
- total_loss = tf.nn.sigmoid_cross_entropy_with_logits(
- labels=labels, logits=model_outputs)
- total_loss = tf.reduce_sum(total_loss, axis=-1)
-
- total_loss = tf_utils.safe_mean(total_loss)
- if aux_losses:
- total_loss += tf.add_n(aux_losses)
-
- total_loss = losses_config.loss_weight * total_loss
- return total_loss
-
- def build_metrics(self,
- training: bool = True) -> List[tf.keras.metrics.Metric]:
- """Gets streaming metrics for training/validation."""
- is_multilabel = self.task_config.train_data.is_multilabel
- if not is_multilabel:
- k = self.task_config.evaluation.top_k
- if (self.task_config.losses.one_hot or
- self.task_config.losses.soft_labels):
- metrics = [
- tf.keras.metrics.CategoricalAccuracy(name='accuracy'),
- tf.keras.metrics.TopKCategoricalAccuracy(
- k=k, name='top_{}_accuracy'.format(k))]
- else:
- metrics = [
- tf.keras.metrics.SparseCategoricalAccuracy(name='accuracy'),
- tf.keras.metrics.SparseTopKCategoricalAccuracy(
- k=k, name='top_{}_accuracy'.format(k))]
- else:
- metrics = []
- # These metrics destablize the training if included in training. The jobs
- # fail due to OOM.
- # TODO(arashwan): Investigate adding following metric to train.
- if not training:
- metrics = [
- tf.keras.metrics.AUC(
- name='globalPR-AUC',
- curve='PR',
- multi_label=False,
- from_logits=True),
- tf.keras.metrics.AUC(
- name='meanPR-AUC',
- curve='PR',
- multi_label=True,
- num_labels=self.task_config.model.num_classes,
- from_logits=True),
- ]
- return metrics
-
- def train_step(self,
- inputs: Tuple[Any, Any],
- model: tf.keras.Model,
- optimizer: tf.keras.optimizers.Optimizer,
- metrics: Optional[List[Any]] = None):
- """Does forward and backward.
-
- Args:
- inputs: A tuple of of input tensors of (features, labels).
- model: A tf.keras.Model instance.
- optimizer: The optimizer for this training step.
- metrics: A nested structure of metrics objects.
-
- Returns:
- A dictionary of logs.
- """
- features, labels = inputs
- is_multilabel = self.task_config.train_data.is_multilabel
- if self.task_config.losses.one_hot and not is_multilabel:
- labels = tf.one_hot(labels, self.task_config.model.num_classes)
-
- num_replicas = tf.distribute.get_strategy().num_replicas_in_sync
- with tf.GradientTape() as tape:
- outputs = model(features, training=True)
- # Casting output layer as float32 is necessary when mixed_precision is
- # mixed_float16 or mixed_bfloat16 to ensure output is casted as float32.
- outputs = tf.nest.map_structure(
- lambda x: tf.cast(x, tf.float32), outputs)
-
- # Computes per-replica loss.
- loss = self.build_losses(
- model_outputs=outputs,
- labels=labels,
- aux_losses=model.losses)
- # Scales loss as the default gradients allreduce performs sum inside the
- # optimizer.
- scaled_loss = loss / num_replicas
-
- # For mixed_precision policy, when LossScaleOptimizer is used, loss is
- # scaled for numerical stability.
- if isinstance(
- optimizer, tf.keras.mixed_precision.LossScaleOptimizer):
- scaled_loss = optimizer.get_scaled_loss(scaled_loss)
-
- tvars = model.trainable_variables
- grads = tape.gradient(scaled_loss, tvars)
- # Scales back gradient before apply_gradients when LossScaleOptimizer is
- # used.
- if isinstance(
- optimizer, tf.keras.mixed_precision.LossScaleOptimizer):
- grads = optimizer.get_unscaled_gradients(grads)
- optimizer.apply_gradients(list(zip(grads, tvars)))
-
- logs = {self.loss: loss}
- if metrics:
- self.process_metrics(metrics, labels, outputs)
- elif model.compiled_metrics:
- self.process_compiled_metrics(model.compiled_metrics, labels, outputs)
- logs.update({m.name: m.result() for m in model.metrics})
- return logs
-
- def validation_step(self,
- inputs: Tuple[Any, Any],
- model: tf.keras.Model,
- metrics: Optional[List[Any]] = None):
- """Runs validatation step.
-
- Args:
- inputs: A tuple of of input tensors of (features, labels).
- model: A tf.keras.Model instance.
- metrics: A nested structure of metrics objects.
-
- Returns:
- A dictionary of logs.
- """
- features, labels = inputs
- one_hot = self.task_config.losses.one_hot
- soft_labels = self.task_config.losses.soft_labels
- is_multilabel = self.task_config.train_data.is_multilabel
- if (one_hot or soft_labels) and not is_multilabel:
- labels = tf.one_hot(labels, self.task_config.model.num_classes)
-
- outputs = self.inference_step(features, model)
- outputs = tf.nest.map_structure(lambda x: tf.cast(x, tf.float32), outputs)
- loss = self.build_losses(
- model_outputs=outputs,
- labels=labels,
- aux_losses=model.losses)
-
- logs = {self.loss: loss}
- if metrics:
- self.process_metrics(metrics, labels, outputs)
- elif model.compiled_metrics:
- self.process_compiled_metrics(model.compiled_metrics, labels, outputs)
- logs.update({m.name: m.result() for m in model.metrics})
- return logs
-
- def inference_step(self, inputs: tf.Tensor, model: tf.keras.Model):
- """Performs the forward step."""
- return model(inputs, training=False)
diff --git a/official/vision/beta/tasks/maskrcnn.py b/official/vision/beta/tasks/maskrcnn.py
deleted file mode 100644
index 5ded06de3e8b80e9e73450a5fa2ff8450bfb9dd5..0000000000000000000000000000000000000000
--- a/official/vision/beta/tasks/maskrcnn.py
+++ /dev/null
@@ -1,455 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""MaskRCNN task definition."""
-import os
-from typing import Any, Optional, List, Tuple, Mapping
-
-from absl import logging
-import tensorflow as tf
-from official.common import dataset_fn
-from official.core import base_task
-from official.core import task_factory
-from official.vision.beta.configs import maskrcnn as exp_cfg
-from official.vision.beta.dataloaders import input_reader_factory
-from official.vision.beta.dataloaders import maskrcnn_input
-from official.vision.beta.dataloaders import tf_example_decoder
-from official.vision.beta.dataloaders import tf_example_label_map_decoder
-from official.vision.beta.evaluation import coco_evaluator
-from official.vision.beta.evaluation import coco_utils
-from official.vision.beta.losses import maskrcnn_losses
-from official.vision.beta.modeling import factory
-
-
-def zero_out_disallowed_class_ids(batch_class_ids: tf.Tensor,
- allowed_class_ids: List[int]):
- """Zero out IDs of classes not in allowed_class_ids.
-
- Args:
- batch_class_ids: A [batch_size, num_instances] int tensor of input
- class IDs.
- allowed_class_ids: A python list of class IDs which we want to allow.
-
- Returns:
- filtered_class_ids: A [batch_size, num_instances] int tensor with any
- class ID not in allowed_class_ids set to 0.
- """
-
- allowed_class_ids = tf.constant(allowed_class_ids,
- dtype=batch_class_ids.dtype)
-
- match_ids = (batch_class_ids[:, :, tf.newaxis] ==
- allowed_class_ids[tf.newaxis, tf.newaxis, :])
-
- match_ids = tf.reduce_any(match_ids, axis=2)
- return tf.where(match_ids, batch_class_ids, tf.zeros_like(batch_class_ids))
-
-
-@task_factory.register_task_cls(exp_cfg.MaskRCNNTask)
-class MaskRCNNTask(base_task.Task):
- """A single-replica view of training procedure.
-
- Mask R-CNN task provides artifacts for training/evalution procedures,
- including loading/iterating over Datasets, initializing the model, calculating
- the loss, post-processing, and customized metrics with reduction.
- """
-
- def build_model(self):
- """Build Mask R-CNN model."""
-
- input_specs = tf.keras.layers.InputSpec(
- shape=[None] + self.task_config.model.input_size)
-
- l2_weight_decay = self.task_config.losses.l2_weight_decay
- # Divide weight decay by 2.0 to match the implementation of tf.nn.l2_loss.
- # (https://www.tensorflow.org/api_docs/python/tf/keras/regularizers/l2)
- # (https://www.tensorflow.org/api_docs/python/tf/nn/l2_loss)
- l2_regularizer = (tf.keras.regularizers.l2(
- l2_weight_decay / 2.0) if l2_weight_decay else None)
-
- model = factory.build_maskrcnn(
- input_specs=input_specs,
- model_config=self.task_config.model,
- l2_regularizer=l2_regularizer)
- return model
-
- def initialize(self, model: tf.keras.Model):
- """Loading pretrained checkpoint."""
- if not self.task_config.init_checkpoint:
- return
-
- ckpt_dir_or_file = self.task_config.init_checkpoint
- if tf.io.gfile.isdir(ckpt_dir_or_file):
- ckpt_dir_or_file = tf.train.latest_checkpoint(ckpt_dir_or_file)
-
- # Restoring checkpoint.
- if self.task_config.init_checkpoint_modules == 'all':
- ckpt = tf.train.Checkpoint(**model.checkpoint_items)
- status = ckpt.read(ckpt_dir_or_file)
- status.expect_partial().assert_existing_objects_matched()
- else:
- ckpt_items = {}
- if 'backbone' in self.task_config.init_checkpoint_modules:
- ckpt_items.update(backbone=model.backbone)
- if 'decoder' in self.task_config.init_checkpoint_modules:
- ckpt_items.update(decoder=model.decoder)
-
- ckpt = tf.train.Checkpoint(**ckpt_items)
- status = ckpt.read(ckpt_dir_or_file)
- status.expect_partial().assert_existing_objects_matched()
-
- logging.info('Finished loading pretrained checkpoint from %s',
- ckpt_dir_or_file)
-
- def build_inputs(self,
- params: exp_cfg.DataConfig,
- input_context: Optional[tf.distribute.InputContext] = None):
- """Build input dataset."""
- decoder_cfg = params.decoder.get()
- if params.decoder.type == 'simple_decoder':
- decoder = tf_example_decoder.TfExampleDecoder(
- include_mask=self._task_config.model.include_mask,
- regenerate_source_id=decoder_cfg.regenerate_source_id,
- mask_binarize_threshold=decoder_cfg.mask_binarize_threshold)
- elif params.decoder.type == 'label_map_decoder':
- decoder = tf_example_label_map_decoder.TfExampleDecoderLabelMap(
- label_map=decoder_cfg.label_map,
- include_mask=self._task_config.model.include_mask,
- regenerate_source_id=decoder_cfg.regenerate_source_id,
- mask_binarize_threshold=decoder_cfg.mask_binarize_threshold)
- else:
- raise ValueError('Unknown decoder type: {}!'.format(params.decoder.type))
-
- parser = maskrcnn_input.Parser(
- output_size=self.task_config.model.input_size[:2],
- min_level=self.task_config.model.min_level,
- max_level=self.task_config.model.max_level,
- num_scales=self.task_config.model.anchor.num_scales,
- aspect_ratios=self.task_config.model.anchor.aspect_ratios,
- anchor_size=self.task_config.model.anchor.anchor_size,
- dtype=params.dtype,
- rpn_match_threshold=params.parser.rpn_match_threshold,
- rpn_unmatched_threshold=params.parser.rpn_unmatched_threshold,
- rpn_batch_size_per_im=params.parser.rpn_batch_size_per_im,
- rpn_fg_fraction=params.parser.rpn_fg_fraction,
- aug_rand_hflip=params.parser.aug_rand_hflip,
- aug_scale_min=params.parser.aug_scale_min,
- aug_scale_max=params.parser.aug_scale_max,
- skip_crowd_during_training=params.parser.skip_crowd_during_training,
- max_num_instances=params.parser.max_num_instances,
- include_mask=self._task_config.model.include_mask,
- mask_crop_size=params.parser.mask_crop_size)
-
- reader = input_reader_factory.input_reader_generator(
- params,
- dataset_fn=dataset_fn.pick_dataset_fn(params.file_type),
- decoder_fn=decoder.decode,
- parser_fn=parser.parse_fn(params.is_training))
- dataset = reader.read(input_context=input_context)
-
- return dataset
-
- def build_losses(self,
- outputs: Mapping[str, Any],
- labels: Mapping[str, Any],
- aux_losses: Optional[Any] = None):
- """Build Mask R-CNN losses."""
- params = self.task_config
- cascade_ious = params.model.roi_sampler.cascade_iou_thresholds
-
- rpn_score_loss_fn = maskrcnn_losses.RpnScoreLoss(
- tf.shape(outputs['box_outputs'])[1])
- rpn_box_loss_fn = maskrcnn_losses.RpnBoxLoss(
- params.losses.rpn_huber_loss_delta)
- rpn_score_loss = tf.reduce_mean(
- rpn_score_loss_fn(
- outputs['rpn_scores'], labels['rpn_score_targets']))
- rpn_box_loss = tf.reduce_mean(
- rpn_box_loss_fn(
- outputs['rpn_boxes'], labels['rpn_box_targets']))
-
- frcnn_cls_loss_fn = maskrcnn_losses.FastrcnnClassLoss()
- frcnn_box_loss_fn = maskrcnn_losses.FastrcnnBoxLoss(
- params.losses.frcnn_huber_loss_delta,
- params.model.detection_head.class_agnostic_bbox_pred)
-
- # Final cls/box losses are computed as an average of all detection heads.
- frcnn_cls_loss = 0.0
- frcnn_box_loss = 0.0
- num_det_heads = 1 if cascade_ious is None else 1 + len(cascade_ious)
- for cas_num in range(num_det_heads):
- frcnn_cls_loss_i = tf.reduce_mean(
- frcnn_cls_loss_fn(
- outputs['class_outputs_{}'
- .format(cas_num) if cas_num else 'class_outputs'],
- outputs['class_targets_{}'
- .format(cas_num) if cas_num else 'class_targets']))
- frcnn_box_loss_i = tf.reduce_mean(
- frcnn_box_loss_fn(
- outputs['box_outputs_{}'.format(cas_num
- ) if cas_num else 'box_outputs'],
- outputs['class_targets_{}'
- .format(cas_num) if cas_num else 'class_targets'],
- outputs['box_targets_{}'.format(cas_num
- ) if cas_num else 'box_targets']))
- frcnn_cls_loss += frcnn_cls_loss_i
- frcnn_box_loss += frcnn_box_loss_i
- frcnn_cls_loss /= num_det_heads
- frcnn_box_loss /= num_det_heads
-
- if params.model.include_mask:
- mask_loss_fn = maskrcnn_losses.MaskrcnnLoss()
- mask_class_targets = outputs['mask_class_targets']
- if self._task_config.allowed_mask_class_ids is not None:
- # Classes with ID=0 are ignored by mask_loss_fn in loss computation.
- mask_class_targets = zero_out_disallowed_class_ids(
- mask_class_targets, self._task_config.allowed_mask_class_ids)
-
- mask_loss = tf.reduce_mean(
- mask_loss_fn(
- outputs['mask_outputs'],
- outputs['mask_targets'],
- mask_class_targets))
- else:
- mask_loss = 0.0
-
- model_loss = (
- params.losses.rpn_score_weight * rpn_score_loss +
- params.losses.rpn_box_weight * rpn_box_loss +
- params.losses.frcnn_class_weight * frcnn_cls_loss +
- params.losses.frcnn_box_weight * frcnn_box_loss +
- params.losses.mask_weight * mask_loss)
-
- total_loss = model_loss
- if aux_losses:
- reg_loss = tf.reduce_sum(aux_losses)
- total_loss = model_loss + reg_loss
-
- total_loss = params.losses.loss_weight * total_loss
- losses = {
- 'total_loss': total_loss,
- 'rpn_score_loss': rpn_score_loss,
- 'rpn_box_loss': rpn_box_loss,
- 'frcnn_cls_loss': frcnn_cls_loss,
- 'frcnn_box_loss': frcnn_box_loss,
- 'mask_loss': mask_loss,
- 'model_loss': model_loss,
- }
- return losses
-
- def _build_coco_metrics(self):
- """Build COCO metrics evaluator."""
- if (not self._task_config.model.include_mask
- ) or self._task_config.annotation_file:
- self.coco_metric = coco_evaluator.COCOEvaluator(
- annotation_file=self._task_config.annotation_file,
- include_mask=self._task_config.model.include_mask,
- per_category_metrics=self._task_config.per_category_metrics)
- else:
- # Builds COCO-style annotation file if include_mask is True, and
- # annotation_file isn't provided.
- annotation_path = os.path.join(self._logging_dir, 'annotation.json')
- if tf.io.gfile.exists(annotation_path):
- logging.info(
- 'annotation.json file exists, skipping creating the annotation'
- ' file.')
- else:
- if self._task_config.validation_data.num_examples <= 0:
- logging.info('validation_data.num_examples needs to be > 0')
- if not self._task_config.validation_data.input_path:
- logging.info('Can not create annotation file for tfds.')
- logging.info(
- 'Creating coco-style annotation file: %s', annotation_path)
- coco_utils.scan_and_generator_annotation_file(
- self._task_config.validation_data.input_path,
- self._task_config.validation_data.file_type,
- self._task_config.validation_data.num_examples,
- self.task_config.model.include_mask, annotation_path,
- regenerate_source_id=self._task_config.validation_data.decoder
- .simple_decoder.regenerate_source_id)
- self.coco_metric = coco_evaluator.COCOEvaluator(
- annotation_file=annotation_path,
- include_mask=self._task_config.model.include_mask,
- per_category_metrics=self._task_config.per_category_metrics)
-
- def build_metrics(self, training: bool = True):
- """Build detection metrics."""
- metrics = []
- if training:
- metric_names = [
- 'total_loss',
- 'rpn_score_loss',
- 'rpn_box_loss',
- 'frcnn_cls_loss',
- 'frcnn_box_loss',
- 'mask_loss',
- 'model_loss'
- ]
- for name in metric_names:
- metrics.append(tf.keras.metrics.Mean(name, dtype=tf.float32))
-
- else:
- if self._task_config.use_coco_metrics:
- self._build_coco_metrics()
- if self._task_config.use_wod_metrics:
- # To use Waymo open dataset metrics, please install one of the pip
- # package `waymo-open-dataset-tf-*` from
- # https://github.com/waymo-research/waymo-open-dataset/blob/master/docs/quick_start.md#use-pre-compiled-pippip3-packages-for-linux
- # Note that the package is built with specific tensorflow version and
- # will produce error if it does not match the tf version that is
- # currently used.
- try:
- from official.vision.beta.evaluation import wod_detection_evaluator # pylint: disable=g-import-not-at-top
- except ModuleNotFoundError:
- logging.error('waymo-open-dataset should be installed to enable Waymo'
- ' evaluator.')
- raise
- self.wod_metric = wod_detection_evaluator.WOD2dDetectionEvaluator()
-
- return metrics
-
- def train_step(self,
- inputs: Tuple[Any, Any],
- model: tf.keras.Model,
- optimizer: tf.keras.optimizers.Optimizer,
- metrics: Optional[List[Any]] = None):
- """Does forward and backward.
-
- Args:
- inputs: a dictionary of input tensors.
- model: the model, forward pass definition.
- optimizer: the optimizer for this training step.
- metrics: a nested structure of metrics objects.
-
- Returns:
- A dictionary of logs.
- """
- images, labels = inputs
- num_replicas = tf.distribute.get_strategy().num_replicas_in_sync
- with tf.GradientTape() as tape:
- outputs = model(
- images,
- image_shape=labels['image_info'][:, 1, :],
- anchor_boxes=labels['anchor_boxes'],
- gt_boxes=labels['gt_boxes'],
- gt_classes=labels['gt_classes'],
- gt_masks=(labels['gt_masks'] if self.task_config.model.include_mask
- else None),
- training=True)
- outputs = tf.nest.map_structure(
- lambda x: tf.cast(x, tf.float32), outputs)
-
- # Computes per-replica loss.
- losses = self.build_losses(
- outputs=outputs, labels=labels, aux_losses=model.losses)
- scaled_loss = losses['total_loss'] / num_replicas
-
- # For mixed_precision policy, when LossScaleOptimizer is used, loss is
- # scaled for numerical stability.
- if isinstance(optimizer, tf.keras.mixed_precision.LossScaleOptimizer):
- scaled_loss = optimizer.get_scaled_loss(scaled_loss)
-
- tvars = model.trainable_variables
- grads = tape.gradient(scaled_loss, tvars)
- # Scales back gradient when LossScaleOptimizer is used.
- if isinstance(optimizer, tf.keras.mixed_precision.LossScaleOptimizer):
- grads = optimizer.get_unscaled_gradients(grads)
- optimizer.apply_gradients(list(zip(grads, tvars)))
-
- logs = {self.loss: losses['total_loss']}
-
- if metrics:
- for m in metrics:
- m.update_state(losses[m.name])
-
- return logs
-
- def validation_step(self,
- inputs: Tuple[Any, Any],
- model: tf.keras.Model,
- metrics: Optional[List[Any]] = None):
- """Validatation step.
-
- Args:
- inputs: a dictionary of input tensors.
- model: the keras.Model.
- metrics: a nested structure of metrics objects.
-
- Returns:
- A dictionary of logs.
- """
- images, labels = inputs
-
- outputs = model(
- images,
- anchor_boxes=labels['anchor_boxes'],
- image_shape=labels['image_info'][:, 1, :],
- training=False)
-
- logs = {self.loss: 0}
- if self._task_config.use_coco_metrics:
- coco_model_outputs = {
- 'detection_boxes': outputs['detection_boxes'],
- 'detection_scores': outputs['detection_scores'],
- 'detection_classes': outputs['detection_classes'],
- 'num_detections': outputs['num_detections'],
- 'source_id': labels['groundtruths']['source_id'],
- 'image_info': labels['image_info']
- }
- if self.task_config.model.include_mask:
- coco_model_outputs.update({
- 'detection_masks': outputs['detection_masks'],
- })
- logs.update(
- {self.coco_metric.name: (labels['groundtruths'], coco_model_outputs)})
-
- if self.task_config.use_wod_metrics:
- wod_model_outputs = {
- 'detection_boxes': outputs['detection_boxes'],
- 'detection_scores': outputs['detection_scores'],
- 'detection_classes': outputs['detection_classes'],
- 'num_detections': outputs['num_detections'],
- 'source_id': labels['groundtruths']['source_id'],
- 'image_info': labels['image_info']
- }
- logs.update(
- {self.wod_metric.name: (labels['groundtruths'], wod_model_outputs)})
- return logs
-
- def aggregate_logs(self, state=None, step_outputs=None):
- if self._task_config.use_coco_metrics:
- if state is None:
- self.coco_metric.reset_states()
- self.coco_metric.update_state(
- step_outputs[self.coco_metric.name][0],
- step_outputs[self.coco_metric.name][1])
- if self._task_config.use_wod_metrics:
- if state is None:
- self.wod_metric.reset_states()
- self.wod_metric.update_state(
- step_outputs[self.wod_metric.name][0],
- step_outputs[self.wod_metric.name][1])
- if state is None:
- # Create an arbitrary state to indicate it's not the first step in the
- # following calls to this function.
- state = True
- return state
-
- def reduce_aggregated_logs(self, aggregated_logs, global_step=None):
- logs = {}
- if self._task_config.use_coco_metrics:
- logs.update(self.coco_metric.result())
- if self._task_config.use_wod_metrics:
- logs.update(self.wod_metric.result())
- return logs
diff --git a/official/vision/beta/tasks/retinanet.py b/official/vision/beta/tasks/retinanet.py
deleted file mode 100644
index e1f28e7795dcf88b6e3d3f3d78fed045fd7bc088..0000000000000000000000000000000000000000
--- a/official/vision/beta/tasks/retinanet.py
+++ /dev/null
@@ -1,358 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""RetinaNet task definition."""
-from typing import Any, List, Mapping, Optional, Tuple
-
-from absl import logging
-import tensorflow as tf
-
-from official.common import dataset_fn
-from official.core import base_task
-from official.core import task_factory
-from official.vision.beta.configs import retinanet as exp_cfg
-from official.vision.beta.dataloaders import input_reader_factory
-from official.vision.beta.dataloaders import retinanet_input
-from official.vision.beta.dataloaders import tf_example_decoder
-from official.vision.beta.dataloaders import tfds_factory
-from official.vision.beta.dataloaders import tf_example_label_map_decoder
-from official.vision.beta.evaluation import coco_evaluator
-from official.vision.beta.losses import focal_loss
-from official.vision.beta.losses import loss_utils
-from official.vision.beta.modeling import factory
-
-
-@task_factory.register_task_cls(exp_cfg.RetinaNetTask)
-class RetinaNetTask(base_task.Task):
- """A single-replica view of training procedure.
-
- RetinaNet task provides artifacts for training/evalution procedures, including
- loading/iterating over Datasets, initializing the model, calculating the loss,
- post-processing, and customized metrics with reduction.
- """
-
- def build_model(self):
- """Build RetinaNet model."""
-
- input_specs = tf.keras.layers.InputSpec(
- shape=[None] + self.task_config.model.input_size)
-
- l2_weight_decay = self.task_config.losses.l2_weight_decay
- # Divide weight decay by 2.0 to match the implementation of tf.nn.l2_loss.
- # (https://www.tensorflow.org/api_docs/python/tf/keras/regularizers/l2)
- # (https://www.tensorflow.org/api_docs/python/tf/nn/l2_loss)
- l2_regularizer = (tf.keras.regularizers.l2(
- l2_weight_decay / 2.0) if l2_weight_decay else None)
-
- model = factory.build_retinanet(
- input_specs=input_specs,
- model_config=self.task_config.model,
- l2_regularizer=l2_regularizer)
- return model
-
- def initialize(self, model: tf.keras.Model):
- """Loading pretrained checkpoint."""
- if not self.task_config.init_checkpoint:
- return
-
- ckpt_dir_or_file = self.task_config.init_checkpoint
- if tf.io.gfile.isdir(ckpt_dir_or_file):
- ckpt_dir_or_file = tf.train.latest_checkpoint(ckpt_dir_or_file)
-
- # Restoring checkpoint.
- if self.task_config.init_checkpoint_modules == 'all':
- ckpt = tf.train.Checkpoint(**model.checkpoint_items)
- status = ckpt.read(ckpt_dir_or_file)
- status.expect_partial().assert_existing_objects_matched()
- else:
- ckpt_items = {}
- if 'backbone' in self.task_config.init_checkpoint_modules:
- ckpt_items.update(backbone=model.backbone)
- if 'decoder' in self.task_config.init_checkpoint_modules:
- ckpt_items.update(decoder=model.decoder)
-
- ckpt = tf.train.Checkpoint(**ckpt_items)
- status = ckpt.read(ckpt_dir_or_file)
- status.expect_partial().assert_existing_objects_matched()
-
- logging.info('Finished loading pretrained checkpoint from %s',
- ckpt_dir_or_file)
-
- def build_inputs(self,
- params: exp_cfg.DataConfig,
- input_context: Optional[tf.distribute.InputContext] = None):
- """Build input dataset."""
-
- if params.tfds_name:
- decoder = tfds_factory.get_detection_decoder(params.tfds_name)
- else:
- decoder_cfg = params.decoder.get()
- if params.decoder.type == 'simple_decoder':
- decoder = tf_example_decoder.TfExampleDecoder(
- regenerate_source_id=decoder_cfg.regenerate_source_id)
- elif params.decoder.type == 'label_map_decoder':
- decoder = tf_example_label_map_decoder.TfExampleDecoderLabelMap(
- label_map=decoder_cfg.label_map,
- regenerate_source_id=decoder_cfg.regenerate_source_id)
- else:
- raise ValueError('Unknown decoder type: {}!'.format(
- params.decoder.type))
-
- parser = retinanet_input.Parser(
- output_size=self.task_config.model.input_size[:2],
- min_level=self.task_config.model.min_level,
- max_level=self.task_config.model.max_level,
- num_scales=self.task_config.model.anchor.num_scales,
- aspect_ratios=self.task_config.model.anchor.aspect_ratios,
- anchor_size=self.task_config.model.anchor.anchor_size,
- dtype=params.dtype,
- match_threshold=params.parser.match_threshold,
- unmatched_threshold=params.parser.unmatched_threshold,
- aug_type=params.parser.aug_type,
- aug_rand_hflip=params.parser.aug_rand_hflip,
- aug_scale_min=params.parser.aug_scale_min,
- aug_scale_max=params.parser.aug_scale_max,
- skip_crowd_during_training=params.parser.skip_crowd_during_training,
- max_num_instances=params.parser.max_num_instances)
-
- reader = input_reader_factory.input_reader_generator(
- params,
- dataset_fn=dataset_fn.pick_dataset_fn(params.file_type),
- decoder_fn=decoder.decode,
- parser_fn=parser.parse_fn(params.is_training))
- dataset = reader.read(input_context=input_context)
-
- return dataset
-
- def build_attribute_loss(self,
- attribute_heads: List[exp_cfg.AttributeHead],
- outputs: Mapping[str, Any],
- labels: Mapping[str, Any],
- box_sample_weight: tf.Tensor) -> float:
- """Computes attribute loss.
-
- Args:
- attribute_heads: a list of attribute head configs.
- outputs: RetinaNet model outputs.
- labels: RetinaNet labels.
- box_sample_weight: normalized bounding box sample weights.
-
- Returns:
- Attribute loss of all attribute heads.
- """
- attribute_loss = 0.0
- for head in attribute_heads:
- if head.name not in labels['attribute_targets']:
- raise ValueError(f'Attribute {head.name} not found in label targets.')
- if head.name not in outputs['attribute_outputs']:
- raise ValueError(f'Attribute {head.name} not found in model outputs.')
-
- y_true_att = loss_utils.multi_level_flatten(
- labels['attribute_targets'][head.name], last_dim=head.size)
- y_pred_att = loss_utils.multi_level_flatten(
- outputs['attribute_outputs'][head.name], last_dim=head.size)
- if head.type == 'regression':
- att_loss_fn = tf.keras.losses.Huber(
- 1.0, reduction=tf.keras.losses.Reduction.SUM)
- att_loss = att_loss_fn(
- y_true=y_true_att,
- y_pred=y_pred_att,
- sample_weight=box_sample_weight)
- else:
- raise ValueError(f'Attribute type {head.type} not supported.')
- attribute_loss += att_loss
-
- return attribute_loss
-
- def build_losses(self,
- outputs: Mapping[str, Any],
- labels: Mapping[str, Any],
- aux_losses: Optional[Any] = None):
- """Build RetinaNet losses."""
- params = self.task_config
- attribute_heads = self.task_config.model.head.attribute_heads
-
- cls_loss_fn = focal_loss.FocalLoss(
- alpha=params.losses.focal_loss_alpha,
- gamma=params.losses.focal_loss_gamma,
- reduction=tf.keras.losses.Reduction.SUM)
- box_loss_fn = tf.keras.losses.Huber(
- params.losses.huber_loss_delta, reduction=tf.keras.losses.Reduction.SUM)
-
- # Sums all positives in a batch for normalization and avoids zero
- # num_positives_sum, which would lead to inf loss during training
- cls_sample_weight = labels['cls_weights']
- box_sample_weight = labels['box_weights']
- num_positives = tf.reduce_sum(box_sample_weight) + 1.0
- cls_sample_weight = cls_sample_weight / num_positives
- box_sample_weight = box_sample_weight / num_positives
- y_true_cls = loss_utils.multi_level_flatten(
- labels['cls_targets'], last_dim=None)
- y_true_cls = tf.one_hot(y_true_cls, params.model.num_classes)
- y_pred_cls = loss_utils.multi_level_flatten(
- outputs['cls_outputs'], last_dim=params.model.num_classes)
- y_true_box = loss_utils.multi_level_flatten(
- labels['box_targets'], last_dim=4)
- y_pred_box = loss_utils.multi_level_flatten(
- outputs['box_outputs'], last_dim=4)
-
- cls_loss = cls_loss_fn(
- y_true=y_true_cls, y_pred=y_pred_cls, sample_weight=cls_sample_weight)
- box_loss = box_loss_fn(
- y_true=y_true_box, y_pred=y_pred_box, sample_weight=box_sample_weight)
-
- model_loss = cls_loss + params.losses.box_loss_weight * box_loss
-
- if attribute_heads:
- model_loss += self.build_attribute_loss(attribute_heads, outputs, labels,
- box_sample_weight)
-
- total_loss = model_loss
- if aux_losses:
- reg_loss = tf.reduce_sum(aux_losses)
- total_loss = model_loss + reg_loss
-
- total_loss = params.losses.loss_weight * total_loss
-
- return total_loss, cls_loss, box_loss, model_loss
-
- def build_metrics(self, training: bool = True):
- """Build detection metrics."""
- metrics = []
- metric_names = ['total_loss', 'cls_loss', 'box_loss', 'model_loss']
- for name in metric_names:
- metrics.append(tf.keras.metrics.Mean(name, dtype=tf.float32))
-
- if not training:
- if self.task_config.validation_data.tfds_name and self.task_config.annotation_file:
- raise ValueError(
- "Can't evaluate using annotation file when TFDS is used.")
- self.coco_metric = coco_evaluator.COCOEvaluator(
- annotation_file=self.task_config.annotation_file,
- include_mask=False,
- per_category_metrics=self.task_config.per_category_metrics)
-
- return metrics
-
- def train_step(self,
- inputs: Tuple[Any, Any],
- model: tf.keras.Model,
- optimizer: tf.keras.optimizers.Optimizer,
- metrics: Optional[List[Any]] = None):
- """Does forward and backward.
-
- Args:
- inputs: a dictionary of input tensors.
- model: the model, forward pass definition.
- optimizer: the optimizer for this training step.
- metrics: a nested structure of metrics objects.
-
- Returns:
- A dictionary of logs.
- """
- features, labels = inputs
- num_replicas = tf.distribute.get_strategy().num_replicas_in_sync
- with tf.GradientTape() as tape:
- outputs = model(features, training=True)
- outputs = tf.nest.map_structure(
- lambda x: tf.cast(x, tf.float32), outputs)
-
- # Computes per-replica loss.
- loss, cls_loss, box_loss, model_loss = self.build_losses(
- outputs=outputs, labels=labels, aux_losses=model.losses)
- scaled_loss = loss / num_replicas
-
- # For mixed_precision policy, when LossScaleOptimizer is used, loss is
- # scaled for numerical stability.
- if isinstance(optimizer, tf.keras.mixed_precision.LossScaleOptimizer):
- scaled_loss = optimizer.get_scaled_loss(scaled_loss)
-
- tvars = model.trainable_variables
- grads = tape.gradient(scaled_loss, tvars)
- # Scales back gradient when LossScaleOptimizer is used.
- if isinstance(optimizer, tf.keras.mixed_precision.LossScaleOptimizer):
- grads = optimizer.get_unscaled_gradients(grads)
- optimizer.apply_gradients(list(zip(grads, tvars)))
-
- logs = {self.loss: loss}
-
- all_losses = {
- 'total_loss': loss,
- 'cls_loss': cls_loss,
- 'box_loss': box_loss,
- 'model_loss': model_loss,
- }
- if metrics:
- for m in metrics:
- m.update_state(all_losses[m.name])
- logs.update({m.name: m.result()})
-
- return logs
-
- def validation_step(self,
- inputs: Tuple[Any, Any],
- model: tf.keras.Model,
- metrics: Optional[List[Any]] = None):
- """Validatation step.
-
- Args:
- inputs: a dictionary of input tensors.
- model: the keras.Model.
- metrics: a nested structure of metrics objects.
-
- Returns:
- A dictionary of logs.
- """
- features, labels = inputs
-
- outputs = model(features, anchor_boxes=labels['anchor_boxes'],
- image_shape=labels['image_info'][:, 1, :],
- training=False)
- loss, cls_loss, box_loss, model_loss = self.build_losses(
- outputs=outputs, labels=labels, aux_losses=model.losses)
- logs = {self.loss: loss}
-
- all_losses = {
- 'total_loss': loss,
- 'cls_loss': cls_loss,
- 'box_loss': box_loss,
- 'model_loss': model_loss,
- }
-
- coco_model_outputs = {
- 'detection_boxes': outputs['detection_boxes'],
- 'detection_scores': outputs['detection_scores'],
- 'detection_classes': outputs['detection_classes'],
- 'num_detections': outputs['num_detections'],
- 'source_id': labels['groundtruths']['source_id'],
- 'image_info': labels['image_info']
- }
- logs.update({self.coco_metric.name: (labels['groundtruths'],
- coco_model_outputs)})
- if metrics:
- for m in metrics:
- m.update_state(all_losses[m.name])
- logs.update({m.name: m.result()})
- return logs
-
- def aggregate_logs(self, state=None, step_outputs=None):
- if state is None:
- self.coco_metric.reset_states()
- state = self.coco_metric
- self.coco_metric.update_state(step_outputs[self.coco_metric.name][0],
- step_outputs[self.coco_metric.name][1])
- return state
-
- def reduce_aggregated_logs(self, aggregated_logs, global_step=None):
- return self.coco_metric.result()
diff --git a/official/vision/beta/tasks/semantic_segmentation.py b/official/vision/beta/tasks/semantic_segmentation.py
deleted file mode 100644
index 70d7ce1927ee465eafad33a812204be2be0f12a7..0000000000000000000000000000000000000000
--- a/official/vision/beta/tasks/semantic_segmentation.py
+++ /dev/null
@@ -1,337 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Image segmentation task definition."""
-from typing import Any, Optional, List, Tuple, Mapping, Union
-
-from absl import logging
-import tensorflow as tf
-from official.common import dataset_fn
-from official.core import base_task
-from official.core import task_factory
-from official.vision.beta.configs import semantic_segmentation as exp_cfg
-from official.vision.beta.dataloaders import input_reader_factory
-from official.vision.beta.dataloaders import segmentation_input
-from official.vision.beta.dataloaders import tfds_factory
-from official.vision.beta.evaluation import segmentation_metrics
-from official.vision.beta.losses import segmentation_losses
-from official.vision.beta.modeling import factory
-
-
-@task_factory.register_task_cls(exp_cfg.SemanticSegmentationTask)
-class SemanticSegmentationTask(base_task.Task):
- """A task for semantic segmentation."""
-
- def build_model(self):
- """Builds segmentation model."""
- input_specs = tf.keras.layers.InputSpec(
- shape=[None] + self.task_config.model.input_size)
-
- l2_weight_decay = self.task_config.losses.l2_weight_decay
- # Divide weight decay by 2.0 to match the implementation of tf.nn.l2_loss.
- # (https://www.tensorflow.org/api_docs/python/tf/keras/regularizers/l2)
- # (https://www.tensorflow.org/api_docs/python/tf/nn/l2_loss)
- l2_regularizer = (tf.keras.regularizers.l2(
- l2_weight_decay / 2.0) if l2_weight_decay else None)
-
- model = factory.build_segmentation_model(
- input_specs=input_specs,
- model_config=self.task_config.model,
- l2_regularizer=l2_regularizer)
- return model
-
- def initialize(self, model: tf.keras.Model):
- """Loads pretrained checkpoint."""
- if not self.task_config.init_checkpoint:
- return
-
- ckpt_dir_or_file = self.task_config.init_checkpoint
- if tf.io.gfile.isdir(ckpt_dir_or_file):
- ckpt_dir_or_file = tf.train.latest_checkpoint(ckpt_dir_or_file)
-
- # Restoring checkpoint.
- if 'all' in self.task_config.init_checkpoint_modules:
- ckpt = tf.train.Checkpoint(**model.checkpoint_items)
- status = ckpt.read(ckpt_dir_or_file)
- status.expect_partial().assert_existing_objects_matched()
- else:
- ckpt_items = {}
- if 'backbone' in self.task_config.init_checkpoint_modules:
- ckpt_items.update(backbone=model.backbone)
- if 'decoder' in self.task_config.init_checkpoint_modules:
- ckpt_items.update(decoder=model.decoder)
-
- ckpt = tf.train.Checkpoint(**ckpt_items)
- status = ckpt.read(ckpt_dir_or_file)
- status.expect_partial().assert_existing_objects_matched()
-
- logging.info('Finished loading pretrained checkpoint from %s',
- ckpt_dir_or_file)
-
- def build_inputs(self,
- params: exp_cfg.DataConfig,
- input_context: Optional[tf.distribute.InputContext] = None):
- """Builds classification input."""
-
- ignore_label = self.task_config.losses.ignore_label
-
- if params.tfds_name:
- decoder = tfds_factory.get_segmentation_decoder(params.tfds_name)
- else:
- decoder = segmentation_input.Decoder()
-
- parser = segmentation_input.Parser(
- output_size=params.output_size,
- crop_size=params.crop_size,
- ignore_label=ignore_label,
- resize_eval_groundtruth=params.resize_eval_groundtruth,
- groundtruth_padded_size=params.groundtruth_padded_size,
- aug_scale_min=params.aug_scale_min,
- aug_scale_max=params.aug_scale_max,
- aug_rand_hflip=params.aug_rand_hflip,
- preserve_aspect_ratio=params.preserve_aspect_ratio,
- dtype=params.dtype)
-
- reader = input_reader_factory.input_reader_generator(
- params,
- dataset_fn=dataset_fn.pick_dataset_fn(params.file_type),
- decoder_fn=decoder.decode,
- parser_fn=parser.parse_fn(params.is_training))
-
- dataset = reader.read(input_context=input_context)
-
- return dataset
-
- def build_losses(self,
- labels: Mapping[str, tf.Tensor],
- model_outputs: Union[Mapping[str, tf.Tensor], tf.Tensor],
- aux_losses: Optional[Any] = None):
- """Segmentation loss.
-
- Args:
- labels: labels.
- model_outputs: Output logits of the classifier.
- aux_losses: auxiliarly loss tensors, i.e. `losses` in keras.Model.
-
- Returns:
- The total loss tensor.
- """
- loss_params = self._task_config.losses
- segmentation_loss_fn = segmentation_losses.SegmentationLoss(
- loss_params.label_smoothing,
- loss_params.class_weights,
- loss_params.ignore_label,
- use_groundtruth_dimension=loss_params.use_groundtruth_dimension,
- top_k_percent_pixels=loss_params.top_k_percent_pixels)
-
- total_loss = segmentation_loss_fn(model_outputs['logits'], labels['masks'])
-
- if 'mask_scores' in model_outputs:
- mask_scoring_loss_fn = segmentation_losses.MaskScoringLoss(
- loss_params.ignore_label)
- total_loss += mask_scoring_loss_fn(
- model_outputs['mask_scores'],
- model_outputs['logits'],
- labels['masks'])
-
- if aux_losses:
- total_loss += tf.add_n(aux_losses)
-
- total_loss = loss_params.loss_weight * total_loss
-
- return total_loss
-
- def process_metrics(self, metrics, labels, model_outputs, **kwargs):
- """Process and update metrics.
-
- Called when using custom training loop API.
-
- Args:
- metrics: a nested structure of metrics objects. The return of function
- self.build_metrics.
- labels: a tensor or a nested structure of tensors.
- model_outputs: a tensor or a nested structure of tensors. For example,
- output of the keras model built by self.build_model.
- **kwargs: other args.
- """
- for metric in metrics:
- if 'mask_scores_mse' is metric.name:
- actual_mask_scores = segmentation_losses.get_actual_mask_scores(
- model_outputs['logits'], labels['masks'],
- self.task_config.losses.ignore_label)
- metric.update_state(actual_mask_scores, model_outputs['mask_scores'])
- else:
- metric.update_state(labels, model_outputs['logits'])
-
- def build_metrics(self, training: bool = True):
- """Gets streaming metrics for training/validation."""
- metrics = []
- if training and self.task_config.evaluation.report_train_mean_iou:
- metrics.append(segmentation_metrics.MeanIoU(
- name='mean_iou',
- num_classes=self.task_config.model.num_classes,
- rescale_predictions=False,
- dtype=tf.float32))
- if self.task_config.model.get('mask_scoring_head'):
- metrics.append(
- tf.keras.metrics.MeanSquaredError(name='mask_scores_mse'))
- else:
- self.iou_metric = segmentation_metrics.PerClassIoU(
- name='per_class_iou',
- num_classes=self.task_config.model.num_classes,
- rescale_predictions=not self.task_config.validation_data
- .resize_eval_groundtruth,
- dtype=tf.float32)
- if self.task_config.validation_data.resize_eval_groundtruth and self.task_config.model.get('mask_scoring_head'): # pylint: disable=line-too-long
- # Masks scores metric can only be computed if labels are scaled to match
- # preticted mask scores.
- metrics.append(
- tf.keras.metrics.MeanSquaredError(name='mask_scores_mse'))
-
- # Update state on CPU if TPUStrategy due to dynamic resizing.
- self._process_iou_metric_on_cpu = isinstance(
- tf.distribute.get_strategy(), tf.distribute.TPUStrategy)
-
- return metrics
-
- def train_step(self,
- inputs: Tuple[Any, Any],
- model: tf.keras.Model,
- optimizer: tf.keras.optimizers.Optimizer,
- metrics: Optional[List[Any]] = None):
- """Does forward and backward.
-
- Args:
- inputs: a dictionary of input tensors.
- model: the model, forward pass definition.
- optimizer: the optimizer for this training step.
- metrics: a nested structure of metrics objects.
-
- Returns:
- A dictionary of logs.
- """
- features, labels = inputs
-
- input_partition_dims = self.task_config.train_input_partition_dims
- if input_partition_dims:
- strategy = tf.distribute.get_strategy()
- features = strategy.experimental_split_to_logical_devices(
- features, input_partition_dims)
-
- num_replicas = tf.distribute.get_strategy().num_replicas_in_sync
- with tf.GradientTape() as tape:
- outputs = model(features, training=True)
- if isinstance(outputs, tf.Tensor):
- outputs = {'logits': outputs}
- # Casting output layer as float32 is necessary when mixed_precision is
- # mixed_float16 or mixed_bfloat16 to ensure output is casted as float32.
- outputs = tf.nest.map_structure(
- lambda x: tf.cast(x, tf.float32), outputs)
-
- # Computes per-replica loss.
- loss = self.build_losses(
- model_outputs=outputs, labels=labels, aux_losses=model.losses)
- # Scales loss as the default gradients allreduce performs sum inside the
- # optimizer.
- scaled_loss = loss / num_replicas
-
- # For mixed_precision policy, when LossScaleOptimizer is used, loss is
- # scaled for numerical stability.
- if isinstance(optimizer, tf.keras.mixed_precision.LossScaleOptimizer):
- scaled_loss = optimizer.get_scaled_loss(scaled_loss)
-
- tvars = model.trainable_variables
- grads = tape.gradient(scaled_loss, tvars)
- # Scales back gradient before apply_gradients when LossScaleOptimizer is
- # used.
- if isinstance(optimizer, tf.keras.mixed_precision.LossScaleOptimizer):
- grads = optimizer.get_unscaled_gradients(grads)
- optimizer.apply_gradients(list(zip(grads, tvars)))
-
- logs = {self.loss: loss}
- if metrics:
- self.process_metrics(metrics, labels, outputs)
- logs.update({m.name: m.result() for m in metrics})
-
- return logs
-
- def validation_step(self,
- inputs: Tuple[Any, Any],
- model: tf.keras.Model,
- metrics: Optional[List[Any]] = None):
- """Validatation step.
-
- Args:
- inputs: a dictionary of input tensors.
- model: the keras.Model.
- metrics: a nested structure of metrics objects.
-
- Returns:
- A dictionary of logs.
- """
- features, labels = inputs
-
- input_partition_dims = self.task_config.eval_input_partition_dims
- if input_partition_dims:
- strategy = tf.distribute.get_strategy()
- features = strategy.experimental_split_to_logical_devices(
- features, input_partition_dims)
-
- outputs = self.inference_step(features, model)
- if isinstance(outputs, tf.Tensor):
- outputs = {'logits': outputs}
- outputs = tf.nest.map_structure(lambda x: tf.cast(x, tf.float32), outputs)
-
- if self.task_config.validation_data.resize_eval_groundtruth:
- loss = self.build_losses(model_outputs=outputs, labels=labels,
- aux_losses=model.losses)
- else:
- loss = 0
-
- logs = {self.loss: loss}
-
- if self._process_iou_metric_on_cpu:
- logs.update({self.iou_metric.name: (labels, outputs['logits'])})
- else:
- self.iou_metric.update_state(labels, outputs['logits'])
-
- if metrics:
- self.process_metrics(metrics, labels, outputs)
- logs.update({m.name: m.result() for m in metrics})
-
- return logs
-
- def inference_step(self, inputs: tf.Tensor, model: tf.keras.Model):
- """Performs the forward step."""
- return model(inputs, training=False)
-
- def aggregate_logs(self, state=None, step_outputs=None):
- if state is None:
- self.iou_metric.reset_states()
- state = self.iou_metric
- if self._process_iou_metric_on_cpu:
- self.iou_metric.update_state(step_outputs[self.iou_metric.name][0],
- step_outputs[self.iou_metric.name][1])
- return state
-
- def reduce_aggregated_logs(self, aggregated_logs, global_step=None):
- result = {}
- ious = self.iou_metric.result()
- # TODO(arashwan): support loading class name from a label map file.
- if self.task_config.evaluation.report_per_class_iou:
- for i, value in enumerate(ious.numpy()):
- result.update({'iou/{}'.format(i): value})
- # Computes mean IoU
- result.update({'mean_iou': tf.reduce_mean(ious).numpy()})
- return result
diff --git a/official/vision/beta/tasks/video_classification.py b/official/vision/beta/tasks/video_classification.py
deleted file mode 100644
index 599a5ee905ec1a8f591a616bea50ffef9d26d75b..0000000000000000000000000000000000000000
--- a/official/vision/beta/tasks/video_classification.py
+++ /dev/null
@@ -1,353 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Video classification task definition."""
-from typing import Any, Optional, List, Tuple
-
-from absl import logging
-import tensorflow as tf
-from official.core import base_task
-from official.core import task_factory
-from official.modeling import tf_utils
-from official.vision.beta.configs import video_classification as exp_cfg
-from official.vision.beta.dataloaders import input_reader_factory
-from official.vision.beta.dataloaders import video_input
-from official.vision.beta.modeling import factory_3d
-
-
-@task_factory.register_task_cls(exp_cfg.VideoClassificationTask)
-class VideoClassificationTask(base_task.Task):
- """A task for video classification."""
-
- def _get_num_classes(self):
- """Gets the number of classes."""
- return self.task_config.train_data.num_classes
-
- def _get_feature_shape(self):
- """Get the common feature shape for train and eval."""
- return [
- d1 if d1 == d2 else None
- for d1, d2 in zip(self.task_config.train_data.feature_shape,
- self.task_config.validation_data.feature_shape)
- ]
-
- def _get_num_test_views(self):
- """Gets number of views for test."""
- num_test_clips = self.task_config.validation_data.num_test_clips
- num_test_crops = self.task_config.validation_data.num_test_crops
- num_test_views = num_test_clips * num_test_crops
- return num_test_views
-
- def _is_multilabel(self):
- """If the label is multi-labels."""
- return self.task_config.train_data.is_multilabel
-
- def build_model(self):
- """Builds video classification model."""
- common_input_shape = self._get_feature_shape()
- input_specs = tf.keras.layers.InputSpec(shape=[None] + common_input_shape)
- logging.info('Build model input %r', common_input_shape)
-
- l2_weight_decay = self.task_config.losses.l2_weight_decay
- # Divide weight decay by 2.0 to match the implementation of tf.nn.l2_loss.
- # (https://www.tensorflow.org/api_docs/python/tf/keras/regularizers/l2)
- # (https://www.tensorflow.org/api_docs/python/tf/nn/l2_loss)
- l2_regularizer = (tf.keras.regularizers.l2(
- l2_weight_decay / 2.0) if l2_weight_decay else None)
-
- model = factory_3d.build_model(
- self.task_config.model.model_type,
- input_specs=input_specs,
- model_config=self.task_config.model,
- num_classes=self._get_num_classes(),
- l2_regularizer=l2_regularizer)
- return model
-
- def initialize(self, model: tf.keras.Model):
- """Loads pretrained checkpoint."""
- if not self.task_config.init_checkpoint:
- return
-
- ckpt_dir_or_file = self.task_config.init_checkpoint
- if tf.io.gfile.isdir(ckpt_dir_or_file):
- ckpt_dir_or_file = tf.train.latest_checkpoint(ckpt_dir_or_file)
-
- # Restoring checkpoint.
- if self.task_config.init_checkpoint_modules == 'all':
- ckpt = tf.train.Checkpoint(**model.checkpoint_items)
- status = ckpt.read(ckpt_dir_or_file)
- status.expect_partial().assert_existing_objects_matched()
- elif self.task_config.init_checkpoint_modules == 'backbone':
- ckpt = tf.train.Checkpoint(backbone=model.backbone)
- status = ckpt.read(ckpt_dir_or_file)
- status.expect_partial().assert_existing_objects_matched()
- else:
- raise ValueError(
- "Only 'all' or 'backbone' can be used to initialize the model.")
-
- logging.info('Finished loading pretrained checkpoint from %s',
- ckpt_dir_or_file)
-
- def _get_dataset_fn(self, params):
- if params.file_type == 'tfrecord':
- return tf.data.TFRecordDataset
- else:
- raise ValueError('Unknown input file type {!r}'.format(params.file_type))
-
- def _get_decoder_fn(self, params):
- if params.tfds_name:
- decoder = video_input.VideoTfdsDecoder(
- image_key=params.image_field_key, label_key=params.label_field_key)
- else:
- decoder = video_input.Decoder(
- image_key=params.image_field_key, label_key=params.label_field_key)
- if self.task_config.train_data.output_audio:
- assert self.task_config.train_data.audio_feature, 'audio feature is empty'
- decoder.add_feature(self.task_config.train_data.audio_feature,
- tf.io.VarLenFeature(dtype=tf.float32))
- return decoder.decode
-
- def build_inputs(self,
- params: exp_cfg.DataConfig,
- input_context: Optional[tf.distribute.InputContext] = None):
- """Builds classification input."""
-
- parser = video_input.Parser(
- input_params=params,
- image_key=params.image_field_key,
- label_key=params.label_field_key)
- postprocess_fn = video_input.PostBatchProcessor(params)
-
- reader = input_reader_factory.input_reader_generator(
- params,
- dataset_fn=self._get_dataset_fn(params),
- decoder_fn=self._get_decoder_fn(params),
- parser_fn=parser.parse_fn(params.is_training),
- postprocess_fn=postprocess_fn)
-
- dataset = reader.read(input_context=input_context)
-
- return dataset
-
- def build_losses(self,
- labels: Any,
- model_outputs: Any,
- aux_losses: Optional[Any] = None):
- """Sparse categorical cross entropy loss.
-
- Args:
- labels: labels.
- model_outputs: Output logits of the classifier.
- aux_losses: auxiliarly loss tensors, i.e. `losses` in keras.Model.
-
- Returns:
- The total loss tensor.
- """
- all_losses = {}
- losses_config = self.task_config.losses
- total_loss = None
- if self._is_multilabel():
- entropy = -tf.reduce_mean(
- tf.reduce_sum(model_outputs * tf.math.log(model_outputs + 1e-8), -1))
- total_loss = tf.keras.losses.binary_crossentropy(
- labels, model_outputs, from_logits=False)
- all_losses.update({
- 'class_loss': total_loss,
- 'entropy': entropy,
- })
- else:
- if losses_config.one_hot:
- total_loss = tf.keras.losses.categorical_crossentropy(
- labels,
- model_outputs,
- from_logits=False,
- label_smoothing=losses_config.label_smoothing)
- else:
- total_loss = tf.keras.losses.sparse_categorical_crossentropy(
- labels, model_outputs, from_logits=False)
-
- total_loss = tf_utils.safe_mean(total_loss)
- all_losses.update({
- 'class_loss': total_loss,
- })
- if aux_losses:
- all_losses.update({
- 'reg_loss': aux_losses,
- })
- total_loss += tf.add_n(aux_losses)
- all_losses[self.loss] = total_loss
-
- return all_losses
-
- def build_metrics(self, training: bool = True):
- """Gets streaming metrics for training/validation."""
- if self.task_config.losses.one_hot:
- metrics = [
- tf.keras.metrics.CategoricalAccuracy(name='accuracy'),
- tf.keras.metrics.TopKCategoricalAccuracy(k=1, name='top_1_accuracy'),
- tf.keras.metrics.TopKCategoricalAccuracy(k=5, name='top_5_accuracy')
- ]
- if self._is_multilabel():
- metrics.append(
- tf.keras.metrics.AUC(
- curve='ROC', multi_label=self._is_multilabel(), name='ROC-AUC'))
- metrics.append(
- tf.keras.metrics.RecallAtPrecision(
- 0.95, name='RecallAtPrecision95'))
- metrics.append(
- tf.keras.metrics.AUC(
- curve='PR', multi_label=self._is_multilabel(), name='PR-AUC'))
- if self.task_config.metrics.use_per_class_recall:
- for i in range(self._get_num_classes()):
- metrics.append(
- tf.keras.metrics.Recall(class_id=i, name=f'recall-{i}'))
- else:
- metrics = [
- tf.keras.metrics.SparseCategoricalAccuracy(name='accuracy'),
- tf.keras.metrics.SparseTopKCategoricalAccuracy(
- k=1, name='top_1_accuracy'),
- tf.keras.metrics.SparseTopKCategoricalAccuracy(
- k=5, name='top_5_accuracy')
- ]
- return metrics
-
- def process_metrics(self, metrics: List[Any], labels: Any,
- model_outputs: Any):
- """Process and update metrics.
-
- Called when using custom training loop API.
-
- Args:
- metrics: a nested structure of metrics objects. The return of function
- self.build_metrics.
- labels: a tensor or a nested structure of tensors.
- model_outputs: a tensor or a nested structure of tensors. For example,
- output of the keras model built by self.build_model.
- """
- for metric in metrics:
- metric.update_state(labels, model_outputs)
-
- def train_step(self,
- inputs: Tuple[Any, Any],
- model: tf.keras.Model,
- optimizer: tf.keras.optimizers.Optimizer,
- metrics: Optional[List[Any]] = None):
- """Does forward and backward.
-
- Args:
- inputs: a dictionary of input tensors.
- model: the model, forward pass definition.
- optimizer: the optimizer for this training step.
- metrics: a nested structure of metrics objects.
-
- Returns:
- A dictionary of logs.
- """
- features, labels = inputs
- input_partition_dims = self.task_config.train_input_partition_dims
- if input_partition_dims:
- strategy = tf.distribute.get_strategy()
- features['image'] = strategy.experimental_split_to_logical_devices(
- features['image'], input_partition_dims)
-
- num_replicas = tf.distribute.get_strategy().num_replicas_in_sync
- with tf.GradientTape() as tape:
- outputs = model(features, training=True)
- # Casting output layer as float32 is necessary when mixed_precision is
- # mixed_float16 or mixed_bfloat16 to ensure output is casted as float32.
- outputs = tf.nest.map_structure(
- lambda x: tf.cast(x, tf.float32), outputs)
-
- # Computes per-replica loss.
- if self._is_multilabel():
- outputs = tf.math.sigmoid(outputs)
- else:
- outputs = tf.math.softmax(outputs)
- all_losses = self.build_losses(
- model_outputs=outputs, labels=labels, aux_losses=model.losses)
- loss = all_losses[self.loss]
- # Scales loss as the default gradients allreduce performs sum inside the
- # optimizer.
- scaled_loss = loss / num_replicas
-
- # For mixed_precision policy, when LossScaleOptimizer is used, loss is
- # scaled for numerical stability.
- if isinstance(
- optimizer, tf.keras.mixed_precision.LossScaleOptimizer):
- scaled_loss = optimizer.get_scaled_loss(scaled_loss)
-
- tvars = model.trainable_variables
- grads = tape.gradient(scaled_loss, tvars)
- # Scales back gradient before apply_gradients when LossScaleOptimizer is
- # used.
- if isinstance(optimizer, tf.keras.mixed_precision.LossScaleOptimizer):
- grads = optimizer.get_unscaled_gradients(grads)
- optimizer.apply_gradients(list(zip(grads, tvars)))
-
- logs = all_losses
- if metrics:
- self.process_metrics(metrics, labels, outputs)
- logs.update({m.name: m.result() for m in metrics})
- elif model.compiled_metrics:
- self.process_compiled_metrics(model.compiled_metrics, labels, outputs)
- logs.update({m.name: m.result() for m in model.metrics})
- return logs
-
- def validation_step(self,
- inputs: Tuple[Any, Any],
- model: tf.keras.Model,
- metrics: Optional[List[Any]] = None):
- """Validatation step.
-
- Args:
- inputs: a dictionary of input tensors.
- model: the keras.Model.
- metrics: a nested structure of metrics objects.
-
- Returns:
- A dictionary of logs.
- """
- features, labels = inputs
- input_partition_dims = self.task_config.eval_input_partition_dims
- if input_partition_dims:
- strategy = tf.distribute.get_strategy()
- features['image'] = strategy.experimental_split_to_logical_devices(
- features['image'], input_partition_dims)
-
- outputs = self.inference_step(features, model)
- outputs = tf.nest.map_structure(lambda x: tf.cast(x, tf.float32), outputs)
- logs = self.build_losses(model_outputs=outputs, labels=labels,
- aux_losses=model.losses)
-
- if metrics:
- self.process_metrics(metrics, labels, outputs)
- logs.update({m.name: m.result() for m in metrics})
- elif model.compiled_metrics:
- self.process_compiled_metrics(model.compiled_metrics, labels, outputs)
- logs.update({m.name: m.result() for m in model.metrics})
- return logs
-
- def inference_step(self, features: tf.Tensor, model: tf.keras.Model):
- """Performs the forward step."""
- outputs = model(features, training=False)
- if self._is_multilabel():
- outputs = tf.math.sigmoid(outputs)
- else:
- outputs = tf.math.softmax(outputs)
- num_test_views = self._get_num_test_views()
- if num_test_views > 1:
- # Averaging output probabilities across multiples views.
- outputs = tf.reshape(outputs, [-1, num_test_views, outputs.shape[-1]])
- outputs = tf.reduce_mean(outputs, axis=1)
- return outputs
diff --git a/official/vision/beta/train_spatial_partitioning.py b/official/vision/beta/train_spatial_partitioning.py
deleted file mode 100644
index 4e4caccc7a2d5757fc5cd3bd0a3df851a669dcc7..0000000000000000000000000000000000000000
--- a/official/vision/beta/train_spatial_partitioning.py
+++ /dev/null
@@ -1,152 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-# Lint as: python3
-"""TensorFlow Model Garden Vision training driver with spatial partitioning."""
-from typing import Sequence
-
-from absl import app
-from absl import flags
-import gin
-import numpy as np
-import tensorflow as tf
-
-from official.common import registry_imports # pylint: disable=unused-import
-from official.common import distribute_utils
-from official.common import flags as tfm_flags
-from official.core import task_factory
-from official.core import train_lib
-from official.core import train_utils
-from official.modeling import performance
-
-
-FLAGS = flags.FLAGS
-
-
-def get_computation_shape_for_model_parallelism(
- input_partition_dims: Sequence[int]) -> Sequence[int]:
- """Returns computation shape to be used for TPUStrategy spatial partition.
-
- Args:
- input_partition_dims: The number of partitions along each dimension.
-
- Returns:
- A list of integers specifying the computation shape.
-
- Raises:
- ValueError: If the number of logical devices is not supported.
- """
- num_logical_devices = np.prod(input_partition_dims)
- if num_logical_devices == 1:
- return [1, 1, 1, 1]
- elif num_logical_devices == 2:
- return [1, 1, 1, 2]
- elif num_logical_devices == 4:
- return [1, 2, 1, 2]
- elif num_logical_devices == 8:
- return [2, 2, 1, 2]
- elif num_logical_devices == 16:
- return [4, 2, 1, 2]
- else:
- raise ValueError(
- 'The number of logical devices %d is not supported. Supported numbers '
- 'are 1, 2, 4, 8, 16' % num_logical_devices)
-
-
-def create_distribution_strategy(distribution_strategy,
- tpu_address,
- input_partition_dims=None,
- num_gpus=None):
- """Creates distribution strategy to use for computation."""
-
- if input_partition_dims is not None:
- if distribution_strategy != 'tpu':
- raise ValueError('Spatial partitioning is only supported '
- 'for TPUStrategy.')
-
- # When `input_partition_dims` is specified create custom TPUStrategy
- # instance with computation shape for model parallelism.
- resolver = tf.distribute.cluster_resolver.TPUClusterResolver(
- tpu=tpu_address)
- if tpu_address not in ('', 'local'):
- tf.config.experimental_connect_to_cluster(resolver)
-
- topology = tf.tpu.experimental.initialize_tpu_system(resolver)
- num_replicas = resolver.get_tpu_system_metadata().num_cores // np.prod(
- input_partition_dims)
- device_assignment = tf.tpu.experimental.DeviceAssignment.build(
- topology,
- num_replicas=num_replicas,
- computation_shape=input_partition_dims)
- return tf.distribute.TPUStrategy(
- resolver, experimental_device_assignment=device_assignment)
-
- return distribute_utils.get_distribution_strategy(
- distribution_strategy=distribution_strategy,
- tpu_address=tpu_address,
- num_gpus=num_gpus)
-
-
-def main(_):
- gin.parse_config_files_and_bindings(FLAGS.gin_file, FLAGS.gin_params)
- params = train_utils.parse_configuration(FLAGS)
- model_dir = FLAGS.model_dir
- if 'train' in FLAGS.mode:
- # Pure eval modes do not output yaml files. Otherwise continuous eval job
- # may race against the train job for writing the same file.
- train_utils.serialize_config(params, model_dir)
-
- # Sets mixed_precision policy. Using 'mixed_float16' or 'mixed_bfloat16'
- # can have significant impact on model speeds by utilizing float16 in case of
- # GPUs, and bfloat16 in the case of TPUs. loss_scale takes effect only when
- # dtype is float16
- if params.runtime.mixed_precision_dtype:
- performance.set_mixed_precision_policy(params.runtime.mixed_precision_dtype)
-
- input_partition_dims = None
- if FLAGS.mode == 'train_and_eval':
- if np.prod(params.task.train_input_partition_dims) != np.prod(
- params.task.eval_input_partition_dims):
- raise ValueError('Train and eval input partition dims can not be'
- 'partitioned on the same node')
- else:
- input_partition_dims = get_computation_shape_for_model_parallelism(
- params.task.train_input_partition_dims)
- elif FLAGS.mode == 'train':
- if params.task.train_input_partition_dims:
- input_partition_dims = get_computation_shape_for_model_parallelism(
- params.task.train_input_partition_dims)
- elif FLAGS.mode == 'eval' or FLAGS.mode == 'continuous_eval':
- if params.task.eval_input_partition_dims:
- input_partition_dims = get_computation_shape_for_model_parallelism(
- params.task.eval_input_partition_dims)
-
- distribution_strategy = create_distribution_strategy(
- distribution_strategy=params.runtime.distribution_strategy,
- num_gpus=params.runtime.num_gpus,
- input_partition_dims=input_partition_dims,
- tpu_address=params.runtime.tpu)
- with distribution_strategy.scope():
- task = task_factory.get_task(params.task, logging_dir=model_dir)
-
- train_lib.run_experiment(
- distribution_strategy=distribution_strategy,
- task=task,
- mode=FLAGS.mode,
- params=params,
- model_dir=model_dir)
-
-if __name__ == '__main__':
- tfm_flags.define_flags()
- app.run(main)
diff --git a/official/vision/configs/__init__.py b/official/vision/configs/__init__.py
index e840e5e12cc57fd741a9380c8a337e70ef73e8f2..7ba5793215cc202e07d4221d9b273fba61cb9c03 100644
--- a/official/vision/configs/__init__.py
+++ b/official/vision/configs/__init__.py
@@ -12,9 +12,11 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Configs package definition."""
+from official.vision.configs import backbones
+from official.vision.configs import backbones_3d
+from official.vision.configs import common
from official.vision.configs import image_classification
from official.vision.configs import maskrcnn
from official.vision.configs import retinanet
diff --git a/official/vision/configs/backbones.py b/official/vision/configs/backbones.py
index a782ec707d79ff4187caa9bdde28ccac4505a51a..337844c4b1dbff51b461313f6eef3884125ca3e5 100644
--- a/official/vision/configs/backbones.py
+++ b/official/vision/configs/backbones.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Backbones configurations."""
import dataclasses
from typing import Optional, List
diff --git a/official/vision/configs/backbones_3d.py b/official/vision/configs/backbones_3d.py
index 3f6a0020ab984a6fc662f6d3923986082215f93e..436a3b1be667e04742f7cf106c3430e5a84bfa10 100644
--- a/official/vision/configs/backbones_3d.py
+++ b/official/vision/configs/backbones_3d.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""3D Backbones configurations."""
from typing import Optional, Tuple
diff --git a/official/vision/configs/common.py b/official/vision/configs/common.py
index a171e0fa088a11fce9b65b9615804e1b81962d64..6731715bc508e8e781725bae2cc34bc739b1ab53 100644
--- a/official/vision/configs/common.py
+++ b/official/vision/configs/common.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Common configurations."""
import dataclasses
diff --git a/official/vision/configs/decoders.py b/official/vision/configs/decoders.py
index 23733a277f78c0afefe6040d62400cd32314b460..4081d429ecd015e1dc3c15cedd5c12ebf0567fc6 100644
--- a/official/vision/configs/decoders.py
+++ b/official/vision/configs/decoders.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Decoders configurations."""
import dataclasses
from typing import List, Optional
diff --git a/official/vision/configs/image_classification.py b/official/vision/configs/image_classification.py
index 50c25ff5be37e2b5fb3993cd1136a71d9573f69d..ab4bdb56a296ecbab86934d1a1b356148ea9020b 100644
--- a/official/vision/configs/image_classification.py
+++ b/official/vision/configs/image_classification.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Image classification configuration definition."""
import dataclasses
import os
diff --git a/official/vision/configs/image_classification_test.py b/official/vision/configs/image_classification_test.py
index 554209f6a8ae59c3cda687938b3ed08cc6df322c..3c58c0553984e58bd7a1f8b38cb4cf8d1d071f29 100644
--- a/official/vision/configs/image_classification_test.py
+++ b/official/vision/configs/image_classification_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for image_classification."""
# pylint: disable=unused-import
from absl.testing import parameterized
diff --git a/official/vision/configs/maskrcnn.py b/official/vision/configs/maskrcnn.py
index 03bca9fdc76e6058cff7c2f6991d5a5a7dde491a..768d871210b2211863dcc1183314944d2579444d 100644
--- a/official/vision/configs/maskrcnn.py
+++ b/official/vision/configs/maskrcnn.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""R-CNN(-RS) configuration definition."""
import dataclasses
@@ -215,6 +214,10 @@ class MaskRCNNTask(cfg.TaskConfig):
# If set, the Waymo Open Dataset evaluator would be used.
use_wod_metrics: bool = False
+ # If set, freezes the backbone during training.
+ # TODO(crisnv) Add paper link when available.
+ freeze_backbone: bool = False
+
COCO_INPUT_PATH_BASE = 'coco'
diff --git a/official/vision/configs/retinanet.py b/official/vision/configs/retinanet.py
index 542a36a85b115cfb7753f1182388f91ddc9d57f8..8846e38dca103f084cf4c10f216be8ddc3c8ecec 100644
--- a/official/vision/configs/retinanet.py
+++ b/official/vision/configs/retinanet.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""RetinaNet configuration definition."""
import dataclasses
diff --git a/official/vision/configs/semantic_segmentation.py b/official/vision/configs/semantic_segmentation.py
index f9de2710a918dd6d683509224fda5444b3e451b2..1449c133b35e2286df8b73bd360afc890aa78773 100644
--- a/official/vision/configs/semantic_segmentation.py
+++ b/official/vision/configs/semantic_segmentation.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Semantic segmentation configuration definition."""
import dataclasses
import os
diff --git a/official/vision/configs/semantic_segmentation_test.py b/official/vision/configs/semantic_segmentation_test.py
index 58fbda7d6c62331d1b48434dbe8a2051d968ef95..fb25dbdc8990aa9289a51fb3d97643d5d152d3f8 100644
--- a/official/vision/configs/semantic_segmentation_test.py
+++ b/official/vision/configs/semantic_segmentation_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for semantic_segmentation."""
# pylint: disable=unused-import
diff --git a/official/vision/configs/video_classification.py b/official/vision/configs/video_classification.py
index 6f3c0d71987327ed23f8954ed741828f12f4429d..d896f0f562244a25f64fb54a8463890134230125 100644
--- a/official/vision/configs/video_classification.py
+++ b/official/vision/configs/video_classification.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Video classification configuration definition."""
import dataclasses
from typing import Optional, Tuple
diff --git a/official/vision/configs/video_classification_test.py b/official/vision/configs/video_classification_test.py
index 794e83666d92896681bb16e0eaecef54d57c2277..6c8053e14e37d38feb5c44947e4c6ff2d212988c 100644
--- a/official/vision/configs/video_classification_test.py
+++ b/official/vision/configs/video_classification_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for video_classification."""
# pylint: disable=unused-import
diff --git a/official/vision/dataloaders/input_reader.py b/official/vision/dataloaders/input_reader.py
index a7cd220f127d5b9eddaf2ddc6115ffb132c54d69..fba7dc2772fda09b482ad76f73437604541e379b 100644
--- a/official/vision/dataloaders/input_reader.py
+++ b/official/vision/dataloaders/input_reader.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Dataset reader for vision model garden."""
from typing import Any, Callable, Optional, Tuple
diff --git a/official/vision/dataloaders/input_reader_factory.py b/official/vision/dataloaders/input_reader_factory.py
index c27839db56b01189332f2a75f782f27c9f365c33..6af7c1b14912549e61ec42bba67b54b1f1de113f 100644
--- a/official/vision/dataloaders/input_reader_factory.py
+++ b/official/vision/dataloaders/input_reader_factory.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Factory for getting TF-Vision input readers."""
from official.common import dataset_fn as dataset_fn_util
diff --git a/official/vision/dataloaders/tfexample_utils.py b/official/vision/dataloaders/tfexample_utils.py
index 5c2a19e456e4428c6dc7769f6c32121a0ce72ab9..0064785152140d21be73f7e18136c3d6aa89d37b 100644
--- a/official/vision/dataloaders/tfexample_utils.py
+++ b/official/vision/dataloaders/tfexample_utils.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Utility functions to create tf.Example and tf.SequnceExample for test.
Example:video classification end-to-end test
diff --git a/official/vision/dataloaders/video_input.py b/official/vision/dataloaders/video_input.py
index e8a1d557bb492a6c8aeb94500fff1f3be6c6e2ab..ba3160ee4a1b35502712ca3d0fea7ae6e5ce5259 100644
--- a/official/vision/dataloaders/video_input.py
+++ b/official/vision/dataloaders/video_input.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Parser for video and label datasets."""
from typing import Dict, Optional, Tuple, Union
diff --git a/official/vision/dataloaders/video_input_test.py b/official/vision/dataloaders/video_input_test.py
index cf945a28daf2df291500199ea4aaeb4505054c4b..2f58e642117ef1fc8e7ee13bf8c4580a6b3d0ac3 100644
--- a/official/vision/dataloaders/video_input_test.py
+++ b/official/vision/dataloaders/video_input_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
import io
diff --git a/official/vision/detection/README.md b/official/vision/detection/README.md
deleted file mode 100644
index 61e793397db7e3d9402a3bb1a1098e8d472c1a4a..0000000000000000000000000000000000000000
--- a/official/vision/detection/README.md
+++ /dev/null
@@ -1,6 +0,0 @@
-# Object Detection Models on TensorFlow 2
-
-This repository is deprecated and replaced by the solid
-implementations inside vision/beta/. All the content has been moved to
-[official/legacy/detection](https://github.com/tensorflow/models/tree/master/official/legacy/detection).
-
diff --git a/official/vision/detection/__init__.py b/official/vision/detection/__init__.py
deleted file mode 100644
index 8362beb564c820abd5169f6fac017022d1cf84e2..0000000000000000000000000000000000000000
--- a/official/vision/detection/__init__.py
+++ /dev/null
@@ -1,16 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Deprecating the vision/detection folder."""
-raise ImportError('This module has been moved to official/legacy/detection')
diff --git a/official/vision/image_classification/README.md b/official/vision/image_classification/README.md
deleted file mode 100644
index c34b48a4f847613132a7b36fa4f1ccd110882143..0000000000000000000000000000000000000000
--- a/official/vision/image_classification/README.md
+++ /dev/null
@@ -1,3 +0,0 @@
-This repository is deprecated and replaced by the solid
-implementations inside vision/beta/. All the content has been moved to
-[official/legacy/image_classification](https://github.com/tensorflow/models/tree/master/official/legacy/image_classification).
diff --git a/official/vision/image_classification/__init__.py b/official/vision/image_classification/__init__.py
deleted file mode 100644
index b35cc0cfaad6bbc5029f8939ab93e85cdbf3fd09..0000000000000000000000000000000000000000
--- a/official/vision/image_classification/__init__.py
+++ /dev/null
@@ -1,17 +0,0 @@
-# Copyright 2022 The TensorFlow Authors. All Rights Reserved.
-#
-# Licensed under the Apache License, Version 2.0 (the "License");
-# you may not use this file except in compliance with the License.
-# You may obtain a copy of the License at
-#
-# http://www.apache.org/licenses/LICENSE-2.0
-#
-# Unless required by applicable law or agreed to in writing, software
-# distributed under the License is distributed on an "AS IS" BASIS,
-# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-# See the License for the specific language governing permissions and
-# limitations under the License.
-
-"""Deprecating the vision/detection folder."""
-raise ImportError(
- 'This module has been moved to official/legacy/image_classification')
diff --git a/official/vision/modeling/__init__.py b/official/vision/modeling/__init__.py
index 800e88f245dc1515fc726ab3bd18efb2b1df3d45..a4229ff65e7b295fb3ce18a2831b64cbc4c8cee4 100644
--- a/official/vision/modeling/__init__.py
+++ b/official/vision/modeling/__init__.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Modeling package definition."""
from official.vision.modeling import backbones
diff --git a/official/vision/modeling/backbones/__init__.py b/official/vision/modeling/backbones/__init__.py
index fb2185d0fbe690486945af345427a46eb6cf9a93..d2093893a15ec18cbcac58b717b085600c93de93 100644
--- a/official/vision/modeling/backbones/__init__.py
+++ b/official/vision/modeling/backbones/__init__.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Backbones package definition."""
from official.vision.modeling.backbones.efficientnet import EfficientNet
diff --git a/official/vision/modeling/backbones/efficientnet_test.py b/official/vision/modeling/backbones/efficientnet_test.py
index 19bcc06ec8507a0779c59f854b15f6ff4a3b2f4d..95cea19d73847dcd72c9e868b8cb8ae7e62a4fc6 100644
--- a/official/vision/modeling/backbones/efficientnet_test.py
+++ b/official/vision/modeling/backbones/efficientnet_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for EfficientNet."""
# Import libraries
diff --git a/official/vision/modeling/backbones/factory.py b/official/vision/modeling/backbones/factory.py
index 1f695413f915d6b264327dce3c9973eeafb60ab1..8421250aee7d9651e83b9fb4381ead9d0b19f810 100644
--- a/official/vision/modeling/backbones/factory.py
+++ b/official/vision/modeling/backbones/factory.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Backbone registers and factory method.
One can regitered a new backbone model by the following two steps:
diff --git a/official/vision/modeling/backbones/factory_test.py b/official/vision/modeling/backbones/factory_test.py
index 1b38eacd7d35ca1f646d9012289757a8466fbd5c..552b79cca659d490a65a8c661fec8bb58e4b6683 100644
--- a/official/vision/modeling/backbones/factory_test.py
+++ b/official/vision/modeling/backbones/factory_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for factory functions."""
# Import libraries
from absl.testing import parameterized
diff --git a/official/vision/modeling/backbones/mobilenet_test.py b/official/vision/modeling/backbones/mobilenet_test.py
index 55dbc81679135674cb440d5f25ea46c1a1e2a2cf..71281d30bd7270d983f929219046aabae6169573 100644
--- a/official/vision/modeling/backbones/mobilenet_test.py
+++ b/official/vision/modeling/backbones/mobilenet_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for MobileNet."""
import itertools
diff --git a/official/vision/modeling/backbones/resnet_3d.py b/official/vision/modeling/backbones/resnet_3d.py
index fe90a2157e2f8677291ebf778feeeeb2c02229bd..6fffb901a4466812260e3537159b8846ade2b42d 100644
--- a/official/vision/modeling/backbones/resnet_3d.py
+++ b/official/vision/modeling/backbones/resnet_3d.py
@@ -153,19 +153,76 @@ class ResNet3D(tf.keras.Model):
self._kernel_regularizer = kernel_regularizer
self._bias_regularizer = bias_regularizer
if tf.keras.backend.image_data_format() == 'channels_last':
- bn_axis = -1
+ self._bn_axis = -1
else:
- bn_axis = 1
+ self._bn_axis = 1
# Build ResNet3D backbone.
inputs = tf.keras.Input(shape=input_specs.shape[1:])
+ endpoints = self._build_model(inputs)
+ self._output_specs = {l: endpoints[l].get_shape() for l in endpoints}
+
+ super(ResNet3D, self).__init__(inputs=inputs, outputs=endpoints, **kwargs)
+
+ def _build_model(self, inputs):
+ """Builds model architecture.
+
+ Args:
+ inputs: the keras input spec.
+
+ Returns:
+ endpoints: A dictionary of backbone endpoint features.
+ """
+ # Build stem.
+ x = self._build_stem(inputs, stem_type=self._stem_type)
+
+ temporal_kernel_size = 1 if self._stem_pool_temporal_stride == 1 else 3
+ x = layers.MaxPool3D(
+ pool_size=[temporal_kernel_size, 3, 3],
+ strides=[self._stem_pool_temporal_stride, 2, 2],
+ padding='same')(x)
+
+ # Build intermediate blocks and endpoints.
+ resnet_specs = RESNET_SPECS[self._model_id]
+ if len(self._temporal_strides) != len(resnet_specs) or len(
+ self._temporal_kernel_sizes) != len(resnet_specs):
+ raise ValueError(
+ 'Number of blocks in temporal specs should equal to resnet_specs.')
+
+ endpoints = {}
+ for i, resnet_spec in enumerate(resnet_specs):
+ if resnet_spec[0] == 'bottleneck3d':
+ block_fn = nn_blocks_3d.BottleneckBlock3D
+ else:
+ raise ValueError('Block fn `{}` is not supported.'.format(
+ resnet_spec[0]))
+
+ use_self_gating = (
+ self._use_self_gating[i] if self._use_self_gating else False)
+ x = self._block_group(
+ inputs=x,
+ filters=resnet_spec[1],
+ temporal_kernel_sizes=self._temporal_kernel_sizes[i],
+ temporal_strides=self._temporal_strides[i],
+ spatial_strides=(1 if i == 0 else 2),
+ block_fn=block_fn,
+ block_repeats=resnet_spec[2],
+ stochastic_depth_drop_rate=nn_layers.get_stochastic_depth_rate(
+ self._init_stochastic_depth_rate, i + 2, 5),
+ use_self_gating=use_self_gating,
+ name='block_group_l{}'.format(i + 2))
+ endpoints[str(i + 2)] = x
+
+ return endpoints
+ def _build_stem(self, inputs, stem_type):
+ """Builds stem layer."""
# Build stem.
if stem_type == 'v0':
x = layers.Conv3D(
filters=64,
- kernel_size=[stem_conv_temporal_kernel_size, 7, 7],
- strides=[stem_conv_temporal_stride, 2, 2],
+ kernel_size=[self._stem_conv_temporal_kernel_size, 7, 7],
+ strides=[self._stem_conv_temporal_stride, 2, 2],
use_bias=False,
padding='same',
kernel_initializer=self._kernel_initializer,
@@ -173,14 +230,15 @@ class ResNet3D(tf.keras.Model):
bias_regularizer=self._bias_regularizer)(
inputs)
x = self._norm(
- axis=bn_axis, momentum=norm_momentum, epsilon=norm_epsilon)(
- x)
- x = tf_utils.get_activation(activation)(x)
+ axis=self._bn_axis,
+ momentum=self._norm_momentum,
+ epsilon=self._norm_epsilon)(x)
+ x = tf_utils.get_activation(self._activation)(x)
elif stem_type == 'v1':
x = layers.Conv3D(
filters=32,
- kernel_size=[stem_conv_temporal_kernel_size, 3, 3],
- strides=[stem_conv_temporal_stride, 2, 2],
+ kernel_size=[self._stem_conv_temporal_kernel_size, 3, 3],
+ strides=[self._stem_conv_temporal_stride, 2, 2],
use_bias=False,
padding='same',
kernel_initializer=self._kernel_initializer,
@@ -188,9 +246,10 @@ class ResNet3D(tf.keras.Model):
bias_regularizer=self._bias_regularizer)(
inputs)
x = self._norm(
- axis=bn_axis, momentum=norm_momentum, epsilon=norm_epsilon)(
- x)
- x = tf_utils.get_activation(activation)(x)
+ axis=self._bn_axis,
+ momentum=self._norm_momentum,
+ epsilon=self._norm_epsilon)(x)
+ x = tf_utils.get_activation(self._activation)(x)
x = layers.Conv3D(
filters=32,
kernel_size=[1, 3, 3],
@@ -202,9 +261,10 @@ class ResNet3D(tf.keras.Model):
bias_regularizer=self._bias_regularizer)(
x)
x = self._norm(
- axis=bn_axis, momentum=norm_momentum, epsilon=norm_epsilon)(
- x)
- x = tf_utils.get_activation(activation)(x)
+ axis=self._bn_axis,
+ momentum=self._norm_momentum,
+ epsilon=self._norm_epsilon)(x)
+ x = tf_utils.get_activation(self._activation)(x)
x = layers.Conv3D(
filters=64,
kernel_size=[1, 3, 3],
@@ -216,51 +276,14 @@ class ResNet3D(tf.keras.Model):
bias_regularizer=self._bias_regularizer)(
x)
x = self._norm(
- axis=bn_axis, momentum=norm_momentum, epsilon=norm_epsilon)(
- x)
- x = tf_utils.get_activation(activation)(x)
+ axis=self._bn_axis,
+ momentum=self._norm_momentum,
+ epsilon=self._norm_epsilon)(x)
+ x = tf_utils.get_activation(self._activation)(x)
else:
raise ValueError(f'Stem type {stem_type} not supported.')
- temporal_kernel_size = 1 if stem_pool_temporal_stride == 1 else 3
- x = layers.MaxPool3D(
- pool_size=[temporal_kernel_size, 3, 3],
- strides=[stem_pool_temporal_stride, 2, 2],
- padding='same')(
- x)
-
- # Build intermediate blocks and endpoints.
- resnet_specs = RESNET_SPECS[model_id]
- if len(temporal_strides) != len(resnet_specs) or len(
- temporal_kernel_sizes) != len(resnet_specs):
- raise ValueError(
- 'Number of blocks in temporal specs should equal to resnet_specs.')
-
- endpoints = {}
- for i, resnet_spec in enumerate(resnet_specs):
- if resnet_spec[0] == 'bottleneck3d':
- block_fn = nn_blocks_3d.BottleneckBlock3D
- else:
- raise ValueError('Block fn `{}` is not supported.'.format(
- resnet_spec[0]))
-
- x = self._block_group(
- inputs=x,
- filters=resnet_spec[1],
- temporal_kernel_sizes=temporal_kernel_sizes[i],
- temporal_strides=temporal_strides[i],
- spatial_strides=(1 if i == 0 else 2),
- block_fn=block_fn,
- block_repeats=resnet_spec[2],
- stochastic_depth_drop_rate=nn_layers.get_stochastic_depth_rate(
- self._init_stochastic_depth_rate, i + 2, 5),
- use_self_gating=use_self_gating[i] if use_self_gating else False,
- name='block_group_l{}'.format(i + 2))
- endpoints[str(i + 2)] = x
-
- self._output_specs = {l: endpoints[l].get_shape() for l in endpoints}
-
- super(ResNet3D, self).__init__(inputs=inputs, outputs=endpoints, **kwargs)
+ return x
def _block_group(self,
inputs: tf.Tensor,
diff --git a/official/vision/modeling/backbones/resnet_3d_test.py b/official/vision/modeling/backbones/resnet_3d_test.py
index 0f8d1c4fc4962f72ee21495524deab3210667446..8ee8a98389274978eebff9de9573a1352c0efb60 100644
--- a/official/vision/modeling/backbones/resnet_3d_test.py
+++ b/official/vision/modeling/backbones/resnet_3d_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for resnet."""
# Import libraries
diff --git a/official/vision/modeling/backbones/resnet_deeplab_test.py b/official/vision/modeling/backbones/resnet_deeplab_test.py
index b271461061d1e18975b8770016043e219bcc0d74..c09396ff61b4d07f53fda2cc78f0a83bd260de38 100644
--- a/official/vision/modeling/backbones/resnet_deeplab_test.py
+++ b/official/vision/modeling/backbones/resnet_deeplab_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for resnet_deeplab models."""
# Import libraries
diff --git a/official/vision/modeling/backbones/resnet_test.py b/official/vision/modeling/backbones/resnet_test.py
index b89bb526e81afe49c5de9d36deee020652fdaa75..f4af789e670f0db8b87b14538304d2aab2a33ade 100644
--- a/official/vision/modeling/backbones/resnet_test.py
+++ b/official/vision/modeling/backbones/resnet_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for resnet."""
# Import libraries
diff --git a/official/vision/modeling/backbones/revnet.py b/official/vision/modeling/backbones/revnet.py
index 04de0dca848201c67d8201fbd690fc0d3f4916c9..aecaded31658a727f7353474df6e77ad389649ec 100644
--- a/official/vision/modeling/backbones/revnet.py
+++ b/official/vision/modeling/backbones/revnet.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Contains definitions of RevNet."""
from typing import Any, Callable, Dict, Optional
@@ -208,7 +207,7 @@ class RevNet(tf.keras.Model):
@property
def output_specs(self) -> Dict[int, tf.TensorShape]:
"""A dict of {level: TensorShape} pairs for the model output."""
- return self._output_specs
+ return self._output_specs # pytype: disable=bad-return-type # trace-all-classes
@factory.register_backbone_builder('revnet')
diff --git a/official/vision/modeling/backbones/revnet_test.py b/official/vision/modeling/backbones/revnet_test.py
index 58b5b715cc5135782dcd06935f3e0bae7f01d894..d3aad349e486ec59e3175641b741ea36a9adfd1b 100644
--- a/official/vision/modeling/backbones/revnet_test.py
+++ b/official/vision/modeling/backbones/revnet_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for RevNet."""
# Import libraries
diff --git a/official/vision/modeling/backbones/spinenet_mobile.py b/official/vision/modeling/backbones/spinenet_mobile.py
index bed2b2dc72765e9fcbf6b0bd1cb515669db5aab1..221aef388cd79bde0ceb6c76e5d89cccba9ef1d7 100644
--- a/official/vision/modeling/backbones/spinenet_mobile.py
+++ b/official/vision/modeling/backbones/spinenet_mobile.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
# Copyright 2020 The TensorFlow Authors. All Rights Reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
diff --git a/official/vision/modeling/backbones/spinenet_mobile_test.py b/official/vision/modeling/backbones/spinenet_mobile_test.py
index cd3226d3e27c12ebc4298ade678bbc2a29df9953..cc0604154372334f72ada548570550ad4c28b5aa 100644
--- a/official/vision/modeling/backbones/spinenet_mobile_test.py
+++ b/official/vision/modeling/backbones/spinenet_mobile_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
# Copyright 2020 The TensorFlow Authors. All Rights Reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
diff --git a/official/vision/modeling/backbones/spinenet_test.py b/official/vision/modeling/backbones/spinenet_test.py
index 8a4d382cb7f087f8a40d78411123fa441f834f51..7d6c3db0d62725455ba7324d3bdb89b04b12374e 100644
--- a/official/vision/modeling/backbones/spinenet_test.py
+++ b/official/vision/modeling/backbones/spinenet_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for SpineNet."""
# Import libraries
from absl.testing import parameterized
diff --git a/official/vision/modeling/classification_model_test.py b/official/vision/modeling/classification_model_test.py
index 7d7fa32476000fb6c0ceb073f5121418ba572704..d630c12de0cf44812ad6b70c437d9e08b24bbeeb 100644
--- a/official/vision/modeling/classification_model_test.py
+++ b/official/vision/modeling/classification_model_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for classification network."""
# Import libraries
diff --git a/official/vision/modeling/decoders/__init__.py b/official/vision/modeling/decoders/__init__.py
index 95fbea29d5f345085e2bbc90464bd2c24c41520c..7efea1543a4631f823a7b2d1dc837ed7859ba41b 100644
--- a/official/vision/modeling/decoders/__init__.py
+++ b/official/vision/modeling/decoders/__init__.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Decoders package definition."""
from official.vision.modeling.decoders.aspp import ASPP
diff --git a/official/vision/modeling/decoders/aspp.py b/official/vision/modeling/decoders/aspp.py
index a15b36beec40b0a806dc54012ab80f2334737e9e..946a5750dae00d4a7e068a9114693ee8c24399f4 100644
--- a/official/vision/modeling/decoders/aspp.py
+++ b/official/vision/modeling/decoders/aspp.py
@@ -103,7 +103,7 @@ class ASPP(tf.keras.layers.Layer):
if self._config_dict['pool_kernel_size']:
pool_kernel_size = [
int(p_size // 2**self._config_dict['level'])
- for p_size in self._config_dict['pool_kernel_size']
+ for p_size in self._config_dict['pool_kernel_size'] # pytype: disable=attribute-error # trace-all-classes
]
self.aspp = self._aspp_layer(
diff --git a/official/vision/modeling/decoders/aspp_test.py b/official/vision/modeling/decoders/aspp_test.py
index 7ff1ea1c7bb81f6efe54e327b95c47aa3a5b3aa3..11398ea8acdc0d9842f709c69b032d636120c96f 100644
--- a/official/vision/modeling/decoders/aspp_test.py
+++ b/official/vision/modeling/decoders/aspp_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for aspp."""
# Import libraries
diff --git a/official/vision/modeling/decoders/fpn_test.py b/official/vision/modeling/decoders/fpn_test.py
index 343d004958de24a516004cef08e940784041c4b8..d6ea7a3ac7ccfac991a4366969885f264f5da4b5 100644
--- a/official/vision/modeling/decoders/fpn_test.py
+++ b/official/vision/modeling/decoders/fpn_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for FPN."""
# Import libraries
diff --git a/official/vision/modeling/decoders/nasfpn_test.py b/official/vision/modeling/decoders/nasfpn_test.py
index 0ad6f56917d8cd5e8cfc992abb16d209bb79f4dc..75c07195188f3cbea13a9107572c6f0acba8658e 100644
--- a/official/vision/modeling/decoders/nasfpn_test.py
+++ b/official/vision/modeling/decoders/nasfpn_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for NAS-FPN."""
# Import libraries
diff --git a/official/vision/modeling/factory.py b/official/vision/modeling/factory.py
index 927adefa95d45e7ccc14b281b81abe2f7ffdb94a..b90a768556e4adeb3c29af95668f3422ccfec14c 100644
--- a/official/vision/modeling/factory.py
+++ b/official/vision/modeling/factory.py
@@ -180,7 +180,7 @@ def build_maskrcnn(input_specs: tf.keras.layers.InputSpec,
background_iou_low_threshold=(
roi_sampler_config.background_iou_low_threshold))
roi_sampler_cascade.append(roi_sampler_obj)
- # Initialize addtional roi simplers for cascade heads.
+ # Initialize additional roi simplers for cascade heads.
if roi_sampler_config.cascade_iou_thresholds:
for iou in roi_sampler_config.cascade_iou_thresholds:
roi_sampler_obj = roi_sampler.ROISampler(
diff --git a/official/vision/modeling/factory_test.py b/official/vision/modeling/factory_test.py
index 4923ef0c4eae652e7be0424d84d79fc72bd475f4..c7b1395542e702160ad7786ce1978422f60a6c09 100644
--- a/official/vision/modeling/factory_test.py
+++ b/official/vision/modeling/factory_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for factory.py."""
# Import libraries
diff --git a/official/vision/modeling/heads/__init__.py b/official/vision/modeling/heads/__init__.py
index 9b93f010cf589d21b8ed6cbef2b9456e5d71c062..1b5746dae9766775dfb51210a3fc676f8d630a6d 100644
--- a/official/vision/modeling/heads/__init__.py
+++ b/official/vision/modeling/heads/__init__.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Heads package definition."""
from official.vision.modeling.heads.dense_prediction_heads import RetinaNetHead
diff --git a/official/vision/modeling/heads/dense_prediction_heads_test.py b/official/vision/modeling/heads/dense_prediction_heads_test.py
index 81c67d7ab0249925aecc7df850d39b1488051037..8c987aaaaa5bce61c4fed491190cd790bf8f7192 100644
--- a/official/vision/modeling/heads/dense_prediction_heads_test.py
+++ b/official/vision/modeling/heads/dense_prediction_heads_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for dense_prediction_heads.py."""
# Import libraries
diff --git a/official/vision/modeling/heads/instance_heads_test.py b/official/vision/modeling/heads/instance_heads_test.py
index da4d6ec4199faa383991efad977def4c773a8006..4be5f15c321ebcd438dc6bcfacfd7d5989181d44 100644
--- a/official/vision/modeling/heads/instance_heads_test.py
+++ b/official/vision/modeling/heads/instance_heads_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for instance_heads.py."""
# Import libraries
diff --git a/official/vision/modeling/heads/segmentation_heads_test.py b/official/vision/modeling/heads/segmentation_heads_test.py
index 13f4f79dc3c5b20dbf2432d592cabb9cbd8bc0a6..fd7e9a7d14592282861d0f89f2024c811ad2ac8c 100644
--- a/official/vision/modeling/heads/segmentation_heads_test.py
+++ b/official/vision/modeling/heads/segmentation_heads_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for segmentation_heads.py."""
# Import libraries
diff --git a/official/vision/modeling/layers/__init__.py b/official/vision/modeling/layers/__init__.py
index 5b356a23d52b1b1dec75a5b63816c748a4726801..bdba7c60bb30251b227b7c0f9a0361ae46363073 100644
--- a/official/vision/modeling/layers/__init__.py
+++ b/official/vision/modeling/layers/__init__.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Layers package definition."""
from official.vision.modeling.layers.box_sampler import BoxSampler
diff --git a/official/vision/modeling/layers/nn_blocks_3d_test.py b/official/vision/modeling/layers/nn_blocks_3d_test.py
index bcdc3cd812b235b0ae9fbfba99407272b5752e31..9f88d4be716dde430df8d70e2ad6df8115994c28 100644
--- a/official/vision/modeling/layers/nn_blocks_3d_test.py
+++ b/official/vision/modeling/layers/nn_blocks_3d_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for resnet."""
# Import libraries
diff --git a/official/vision/modeling/layers/nn_blocks_test.py b/official/vision/modeling/layers/nn_blocks_test.py
index e60c5fcafd522becc03fd300667c7f83f2ee6818..3c5a1dedc775f3c31c3df936d3be1f77d65f46e3 100644
--- a/official/vision/modeling/layers/nn_blocks_test.py
+++ b/official/vision/modeling/layers/nn_blocks_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for nn_blocks."""
from typing import Any, Iterable, Tuple
diff --git a/official/vision/modeling/layers/nn_layers_test.py b/official/vision/modeling/layers/nn_layers_test.py
index a23c785865601f8438501d7b031708192f42645b..fad37a73cc67b52c58e66b6e834b05bbf93895e2 100644
--- a/official/vision/modeling/layers/nn_layers_test.py
+++ b/official/vision/modeling/layers/nn_layers_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for nn_layers."""
# Import libraries
diff --git a/official/vision/modeling/maskrcnn_model_test.py b/official/vision/modeling/maskrcnn_model_test.py
index 471b0c28cd59ff84278ae53e143cae6fdce6edc1..96ea3a2efd4483d8a2113c2e7914eb919bcea186 100644
--- a/official/vision/modeling/maskrcnn_model_test.py
+++ b/official/vision/modeling/maskrcnn_model_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for maskrcnn_model.py."""
import os
diff --git a/official/vision/modeling/retinanet_model_test.py b/official/vision/modeling/retinanet_model_test.py
index 27523423fc998f715722d9bee89bc627dc37dde6..80ee55aff93171f5825d724c9d374c889c69bb61 100644
--- a/official/vision/modeling/retinanet_model_test.py
+++ b/official/vision/modeling/retinanet_model_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for RetinaNet models."""
# Import libraries
diff --git a/official/vision/modeling/segmentation_model_test.py b/official/vision/modeling/segmentation_model_test.py
index 34b97c48be02ba428a24b1e9d529217592f1c250..b1a2f8076bae46b8ba28192c0eadea4942292621 100644
--- a/official/vision/modeling/segmentation_model_test.py
+++ b/official/vision/modeling/segmentation_model_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for segmentation network."""
from absl.testing import parameterized
diff --git a/official/vision/modeling/video_classification_model_test.py b/official/vision/modeling/video_classification_model_test.py
index 6752dafdef36ab47649af21af1c9726fcecc873f..cd4b4a3559407b28c9ef9ded43070b19b2d6c53f 100644
--- a/official/vision/modeling/video_classification_model_test.py
+++ b/official/vision/modeling/video_classification_model_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tests for video classification network."""
# Import libraries
diff --git a/official/vision/ops/preprocess_ops_3d.py b/official/vision/ops/preprocess_ops_3d.py
index 16ab2dd6e0dfb6223a746b70484d106d049de69b..25f680169212a18f95928711c3a8ac0320635a32 100644
--- a/official/vision/ops/preprocess_ops_3d.py
+++ b/official/vision/ops/preprocess_ops_3d.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Utils for processing video dataset features."""
from typing import Optional, Tuple
diff --git a/official/vision/ops/preprocess_ops_3d_test.py b/official/vision/ops/preprocess_ops_3d_test.py
index 546c3ab14fd948f07b8bfc55a39a96c4840feb71..e438f5a7dec72b34e7257885a2d19ca37479c1f4 100644
--- a/official/vision/ops/preprocess_ops_3d_test.py
+++ b/official/vision/ops/preprocess_ops_3d_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
import io
import itertools
diff --git a/official/vision/serving/detection.py b/official/vision/serving/detection.py
index e6c1ba4cd8f0bddba45e6e92837f2c3ac2862369..fce06497246688ec93d6aacfcad94d93d608468e 100644
--- a/official/vision/serving/detection.py
+++ b/official/vision/serving/detection.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Detection input and model functions for serving/inference."""
from typing import Mapping, Text
diff --git a/official/vision/serving/detection_test.py b/official/vision/serving/detection_test.py
index 0b77f42825b4ea7e1afe4ed0daad77536dd1c109..08b26180b79a8db8bb5fbdded4f5251dbdcf0fb4 100644
--- a/official/vision/serving/detection_test.py
+++ b/official/vision/serving/detection_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Test for image detection export lib."""
import io
diff --git a/official/vision/serving/export_base.py b/official/vision/serving/export_base.py
index 1700c82e9dcdde822a02f0f4560b0bb444bae0fd..d7dcd61eaa8a7c2076c750f57287f6045ebbb5d5 100644
--- a/official/vision/serving/export_base.py
+++ b/official/vision/serving/export_base.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Base class for model export."""
import abc
diff --git a/official/vision/serving/export_saved_model.py b/official/vision/serving/export_saved_model.py
index 2c360e083375966051b0101f665a8b6df61a45dd..b2fe3a60ac4420e05ce33188ce39dc7ef573ce21 100644
--- a/official/vision/serving/export_saved_model.py
+++ b/official/vision/serving/export_saved_model.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
r"""Vision models export binary for serving/inference.
To export a trained checkpoint in saved_model format (shell script):
@@ -46,9 +45,8 @@ from official.vision.serving import export_saved_model_lib
FLAGS = flags.FLAGS
-
-flags.DEFINE_string(
- 'experiment', None, 'experiment type, e.g. retinanet_resnetfpn_coco')
+flags.DEFINE_string('experiment', None,
+ 'experiment type, e.g. retinanet_resnetfpn_coco')
flags.DEFINE_string('export_dir', None, 'The export directory.')
flags.DEFINE_string('checkpoint_path', None, 'Checkpoint path.')
flags.DEFINE_multi_string(
@@ -64,8 +62,7 @@ flags.DEFINE_string(
'params_override', '',
'The JSON/YAML file or string which specifies the parameter to be overriden'
' on top of `config_file` template.')
-flags.DEFINE_integer(
- 'batch_size', None, 'The batch size.')
+flags.DEFINE_integer('batch_size', None, 'The batch size.')
flags.DEFINE_string(
'input_type', 'image_tensor',
'One of `image_tensor`, `image_bytes`, `tf_example` and `tflite`.')
@@ -77,6 +74,8 @@ flags.DEFINE_string('export_checkpoint_subdir', 'checkpoint',
'The subdirectory for checkpoints.')
flags.DEFINE_string('export_saved_model_subdir', 'saved_model',
'The subdirectory for saved model.')
+flags.DEFINE_bool('log_model_flops_and_params', False,
+ 'If true, logs model flops and parameters.')
def main(_):
@@ -100,7 +99,8 @@ def main(_):
checkpoint_path=FLAGS.checkpoint_path,
export_dir=FLAGS.export_dir,
export_checkpoint_subdir=FLAGS.export_checkpoint_subdir,
- export_saved_model_subdir=FLAGS.export_saved_model_subdir)
+ export_saved_model_subdir=FLAGS.export_saved_model_subdir,
+ log_model_flops_and_params=FLAGS.log_model_flops_and_params)
if __name__ == '__main__':
diff --git a/official/vision/serving/export_saved_model_lib.py b/official/vision/serving/export_saved_model_lib.py
index 2559aab06f5cf35b3d642f3af6bb785bc93553c0..ddca8da91ed2469eea8db5f17149f21e0ba1ed0f 100644
--- a/official/vision/serving/export_saved_model_lib.py
+++ b/official/vision/serving/export_saved_model_lib.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
r"""Vision models export utility function for serving/inference."""
import os
@@ -43,7 +42,8 @@ def export_inference_graph(
export_checkpoint_subdir: Optional[str] = None,
export_saved_model_subdir: Optional[str] = None,
save_options: Optional[tf.saved_model.SaveOptions] = None,
- log_model_flops_and_params: bool = False):
+ log_model_flops_and_params: bool = False,
+ checkpoint: Optional[tf.train.Checkpoint] = None):
"""Exports inference graph for the model specified in the exp config.
Saved model is stored at export_dir/saved_model, checkpoint is saved
@@ -67,6 +67,8 @@ def export_inference_graph(
save_options: `SaveOptions` for `tf.saved_model.save`.
log_model_flops_and_params: If True, writes model FLOPs to model_flops.txt
and model parameters to model_params.txt.
+ checkpoint: An optional tf.train.Checkpoint. If provided, the export module
+ will use it to read the weights.
"""
if export_checkpoint_subdir:
@@ -123,6 +125,7 @@ def export_inference_graph(
export_module,
function_keys=[input_type],
export_savedmodel_dir=output_saved_model_directory,
+ checkpoint=checkpoint,
checkpoint_path=checkpoint_path,
timestamped=False,
save_options=save_options)
diff --git a/official/vision/serving/export_tfhub.py b/official/vision/serving/export_tfhub.py
index 6b211c3e6752e8251c93679fcaa173834e260ca1..b6e939f25719f33912d523359e02e1df31d8ca4c 100644
--- a/official/vision/serving/export_tfhub.py
+++ b/official/vision/serving/export_tfhub.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""A script to export the image classification as a TF-Hub SavedModel."""
# Import libraries
diff --git a/official/vision/serving/image_classification.py b/official/vision/serving/image_classification.py
index 505a51ac0f3d19cb15b811bba33b73fa9761da0d..1f870d9870a37d91ecd467c7bb56c18afe37d188 100644
--- a/official/vision/serving/image_classification.py
+++ b/official/vision/serving/image_classification.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Image classification input and model functions for serving/inference."""
import tensorflow as tf
diff --git a/official/vision/serving/image_classification_test.py b/official/vision/serving/image_classification_test.py
index e75b785602d7e1d7a519d514e7333e11278389f1..cc859d9e77d18629fe87c5c7b70771c42983b2dd 100644
--- a/official/vision/serving/image_classification_test.py
+++ b/official/vision/serving/image_classification_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Test for image classification export lib."""
import io
diff --git a/official/vision/serving/semantic_segmentation.py b/official/vision/serving/semantic_segmentation.py
index 8397a4edc9844ae960a63c24c20751a04ea17bb4..265abe0979ad58fc97c58ee2d890e991c4b382b2 100644
--- a/official/vision/serving/semantic_segmentation.py
+++ b/official/vision/serving/semantic_segmentation.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Semantic segmentation input and model functions for serving/inference."""
import tensorflow as tf
diff --git a/official/vision/serving/semantic_segmentation_test.py b/official/vision/serving/semantic_segmentation_test.py
index 7392678d5fbf6243d59d46ee993bc144f4cfa4b0..2c175ee046a2e124371ef748120503f07a7bb25c 100644
--- a/official/vision/serving/semantic_segmentation_test.py
+++ b/official/vision/serving/semantic_segmentation_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Test for semantic segmentation export lib."""
import io
diff --git a/official/vision/serving/video_classification.py b/official/vision/serving/video_classification.py
index ba4b79fbe5d22a70b6ec6f1eb6630c5ab60138c3..2564c015ca80a12cb662fb13812c00e0769b0ec5 100644
--- a/official/vision/serving/video_classification.py
+++ b/official/vision/serving/video_classification.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Video classification input and model functions for serving/inference."""
from typing import Mapping, Dict, Text
diff --git a/official/vision/serving/video_classification_test.py b/official/vision/serving/video_classification_test.py
index 1432a69f3f971deb3e700c8a5378e3fbcea71fc6..18fc38fe6dd41faf178d5412c1d52ab4aee4cbfd 100644
--- a/official/vision/serving/video_classification_test.py
+++ b/official/vision/serving/video_classification_test.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
# import io
import os
diff --git a/official/vision/tasks/__init__.py b/official/vision/tasks/__init__.py
index 8b164573b2d54e0796e789e54262fdb5c7375673..c274fc5cd35e15897f3007828da93f872d2c865e 100644
--- a/official/vision/tasks/__init__.py
+++ b/official/vision/tasks/__init__.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""Tasks package definition."""
from official.vision.tasks import image_classification
diff --git a/official/vision/tasks/maskrcnn.py b/official/vision/tasks/maskrcnn.py
index c7169c4a3e17fc783e6f72c0b72a14e556c796ab..3aed673639cb17fc4693e3f630e5ff15bc6ae331 100644
--- a/official/vision/tasks/maskrcnn.py
+++ b/official/vision/tasks/maskrcnn.py
@@ -82,10 +82,15 @@ class MaskRCNNTask(base_task.Task):
input_specs=input_specs,
model_config=self.task_config.model,
l2_regularizer=l2_regularizer)
+
+ if self.task_config.freeze_backbone:
+ model.backbone.trainable = False
+
return model
def initialize(self, model: tf.keras.Model):
"""Loading pretrained checkpoint."""
+
if not self.task_config.init_checkpoint:
return
diff --git a/official/vision/train.py b/official/vision/train.py
index 46ed592ffa21d0a48d8b607c7016298d578a5516..cb0a3cb58c42a99b83d0c4519dbe5e5ce0924f01 100644
--- a/official/vision/train.py
+++ b/official/vision/train.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""TensorFlow Model Garden Vision training driver."""
from absl import app
diff --git a/official/vision/train_spatial_partitioning.py b/official/vision/train_spatial_partitioning.py
index 4cba1a585c862267c16bc15fdc3a02a98cbb17db..bb0f5ec972385c5cf3d65d2f5bdc3bc4b803cb46 100644
--- a/official/vision/train_spatial_partitioning.py
+++ b/official/vision/train_spatial_partitioning.py
@@ -12,7 +12,6 @@
# See the License for the specific language governing permissions and
# limitations under the License.
-# Lint as: python3
"""TensorFlow Model Garden Vision training driver with spatial partitioning."""
from typing import Sequence