
v1.0
Showing
sam/app/requirements.txt
0 → 100644
sam/app/utils/__init__.py
0 → 100644
sam/app/utils/tools.py
0 → 100644
sam/assets/logo2.png
0 → 100644
{kind=link}
131 KB
sam/assets/mask_box.jpg
0 → 100644
{kind=link}

125 KB
{kind=link}
184 KB
sam/assets/mask_point.jpg
0 → 100644
{kind=link}
149 KB
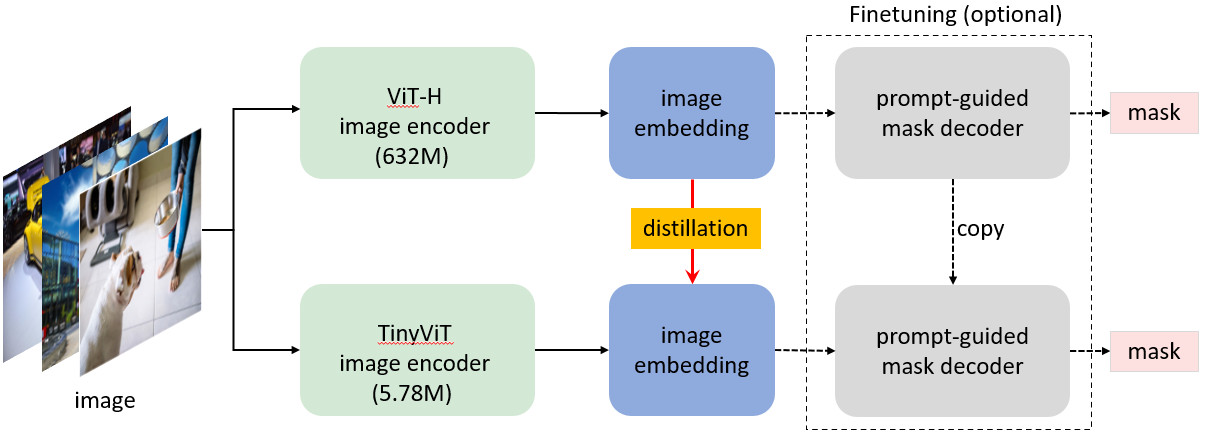
sam/assets/model_diagram.jpg
0 → 100644
{kind=link}
85 KB
sam/assets/notebook1.png
0 → 100644
{kind=link}

1.05 MB
sam/assets/notebook2.png
0 → 100644
{kind=link}

1.06 MB
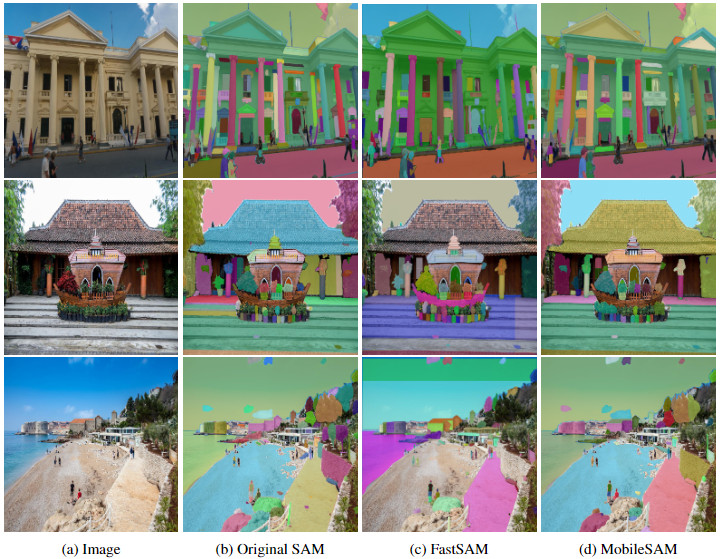
sam/figures/comparison.png
0 → 100644
{kind=link}

403 KB
sam/linter.sh
0 → 100644
This source diff could not be displayed because it is too large. You can view the blob instead.
{kind=link}

280 KB
{kind=link}

228 KB
This source diff could not be displayed because it is too large. You can view the blob instead.
sam/repvit_sam/__init__.py
0 → 100644