
init
Showing
assets/teaser.gif
0 → 100644
{kind=link}

719 KB
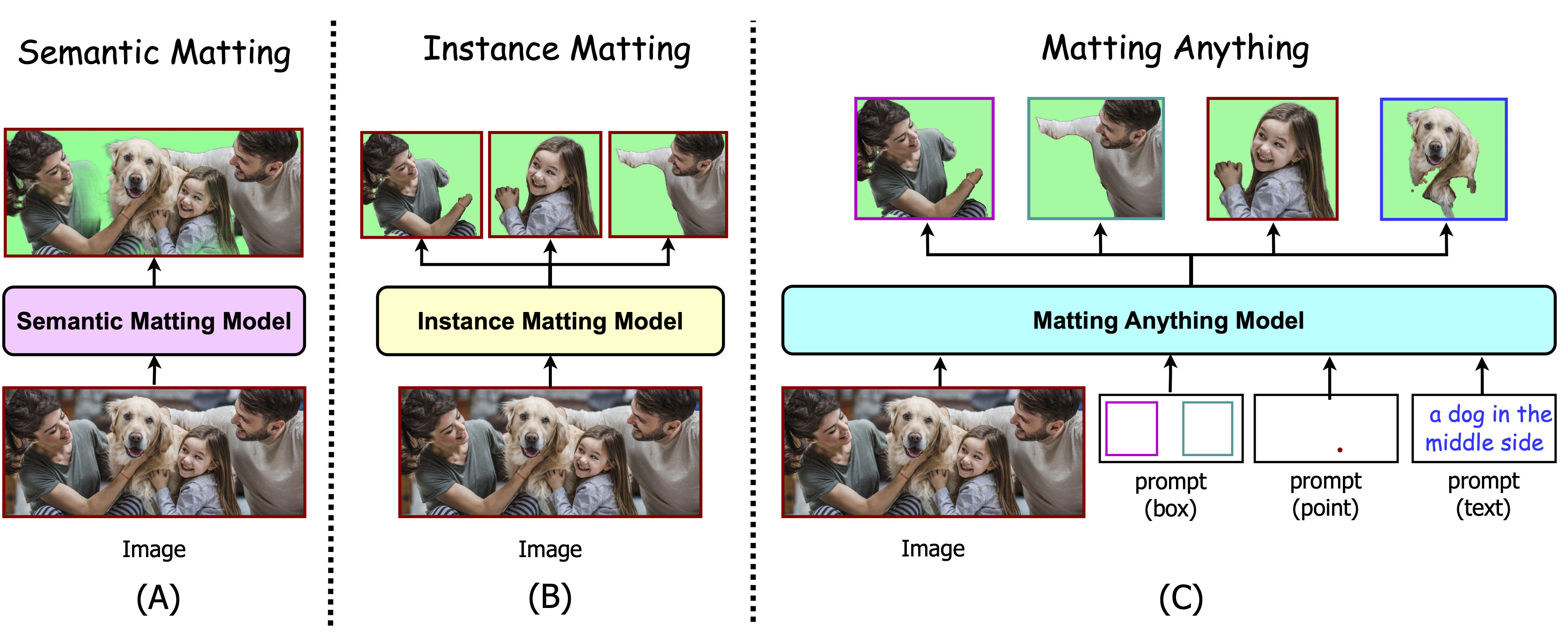
assets/teaser_arxiv_v2.png
0 → 100644
{kind=link}
3.55 MB
config/MAM-ViTB-8gpu.toml
0 → 100644
config/MAM-ViTH-8gpu.toml
0 → 100644
config/MAM-ViTL-8gpu.toml
0 → 100644
dataloader/__init__.py
0 → 100644
dataloader/data_generator.py
0 → 100644
dataloader/image_file.py
0 → 100644
dataloader/prefetcher.py
0 → 100644
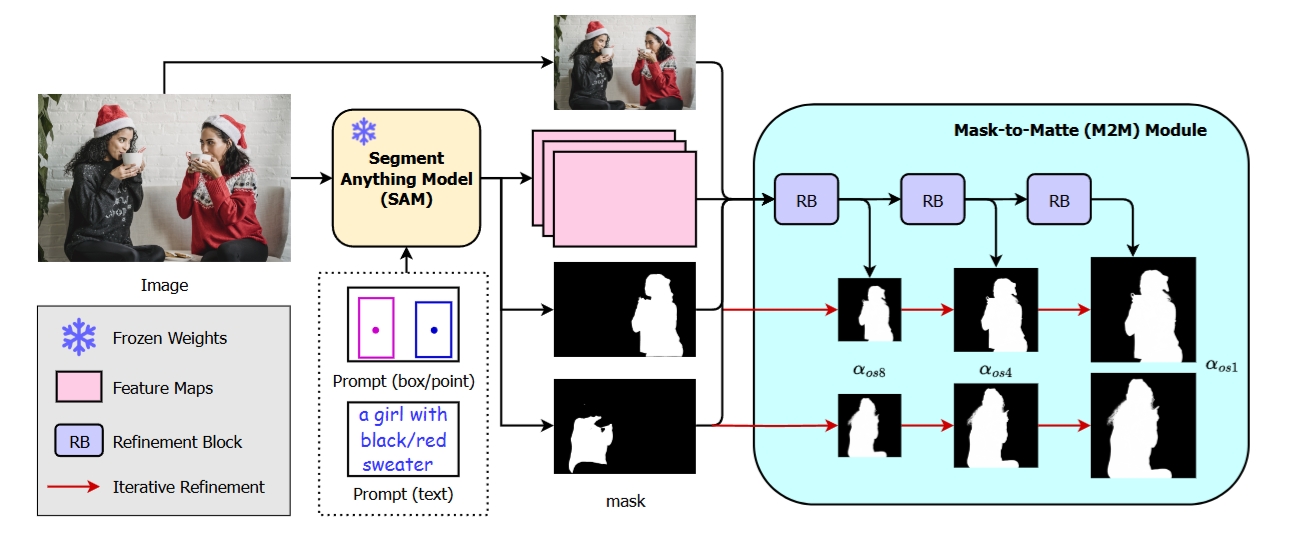
doc/Architecture.png
0 → 100644
{kind=link}
206 KB
doc/demo.jpg
0 → 100644
{kind=link}

174 KB
doc/matte.png
0 → 100644
{kind=link}

542 KB
doc/result.png
0 → 100644
{kind=link}

1.03 MB
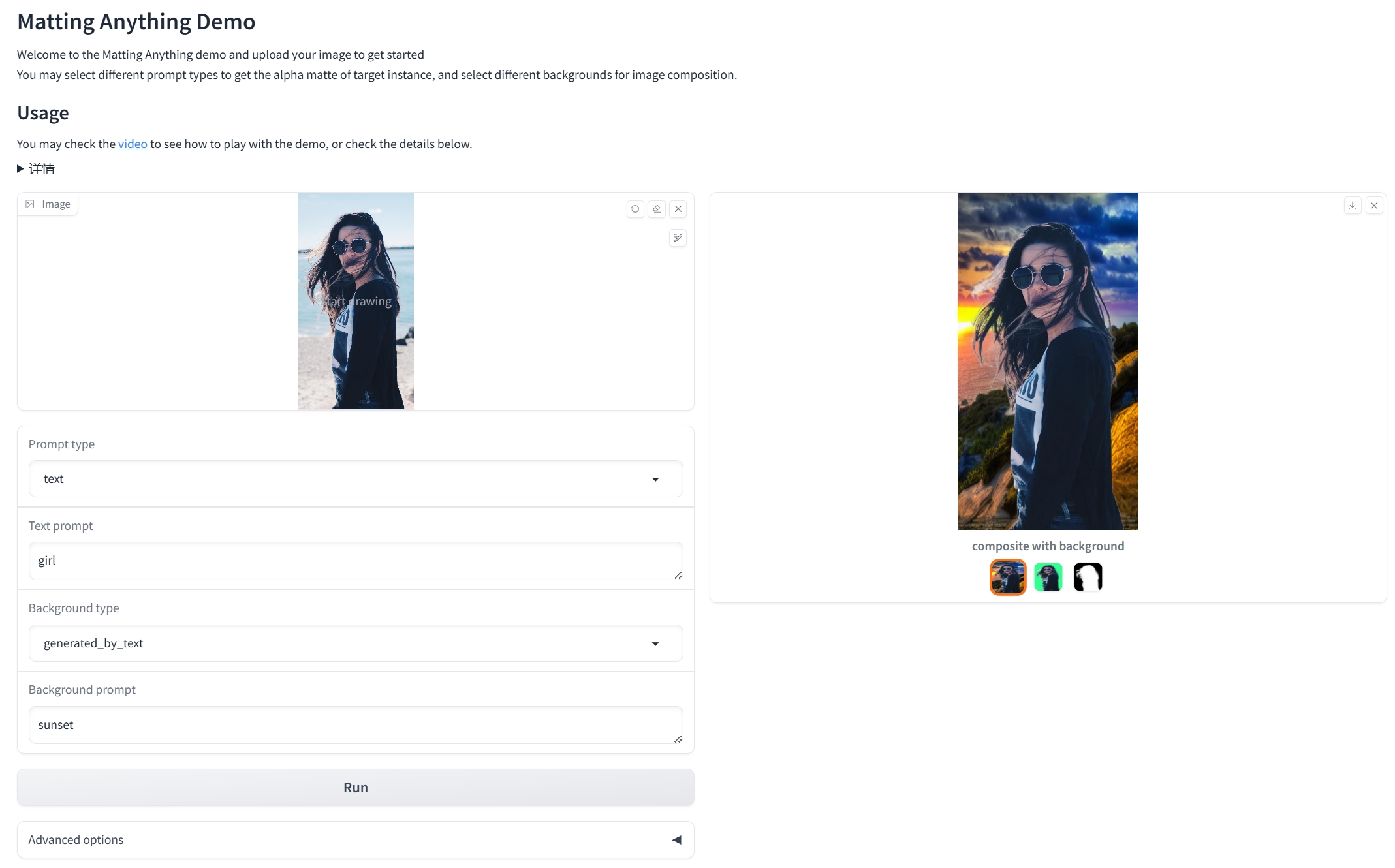
doc/webui.png
0 → 100644
{kind=link}

250 KB
doc/webui_result.png
0 → 100644
{kind=link}
384 KB
docker/Dockerfile
0 → 100644
evaluation/IMQ.py
0 → 100755
evaluation/IMQ_quick_rwp.py
0 → 100755