
magic-animate
Showing
magicanimate/utils/util.py
0 → 100644
model.properties
0 → 100644
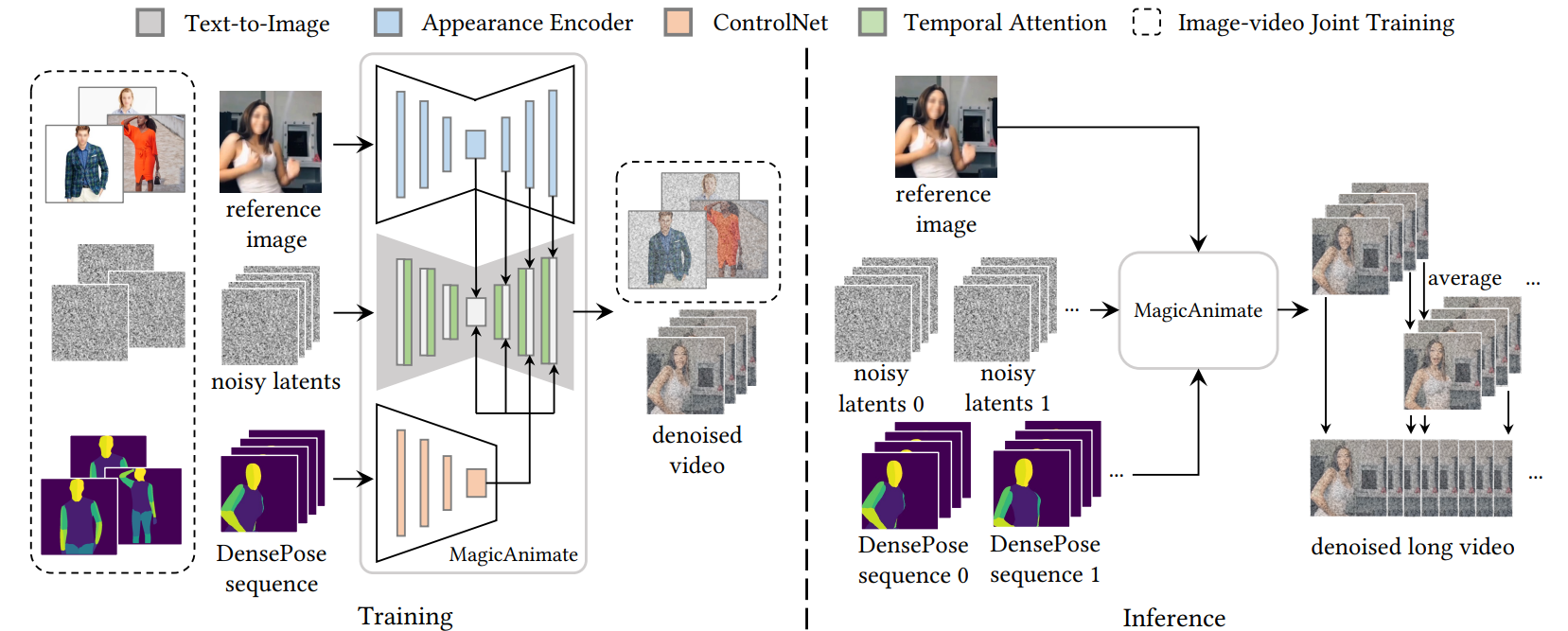
readme_images/image-1.png
0 → 100644
{kind=link}
484 KB
readme_images/image-5.png
0 → 100644
{kind=link}

102 KB
readme_images/m.gif
0 → 100644
{kind=link}
638 KB
requirements.txt
0 → 100644
scripts/animate.sh
0 → 100644
scripts/animate_dist.sh
0 → 100644