
hyi2v
Showing
hyvideo/utils/file_utils.py
0 → 100644
hyvideo/utils/helpers.py
0 → 100644
hyvideo/utils/lora_utils.py
0 → 100644
hyvideo/utils/train_utils.py
0 → 100644
hyvideo/vae/__init__.py
0 → 100644
hyvideo/vae/vae.py
0 → 100644
icon.png
0 → 100644
{kind=link}
70.5 KB
model.properties
0 → 100644
modified/config.py
0 → 100644
modified/envs.py
0 → 100644
modified/fix.sh
0 → 100644
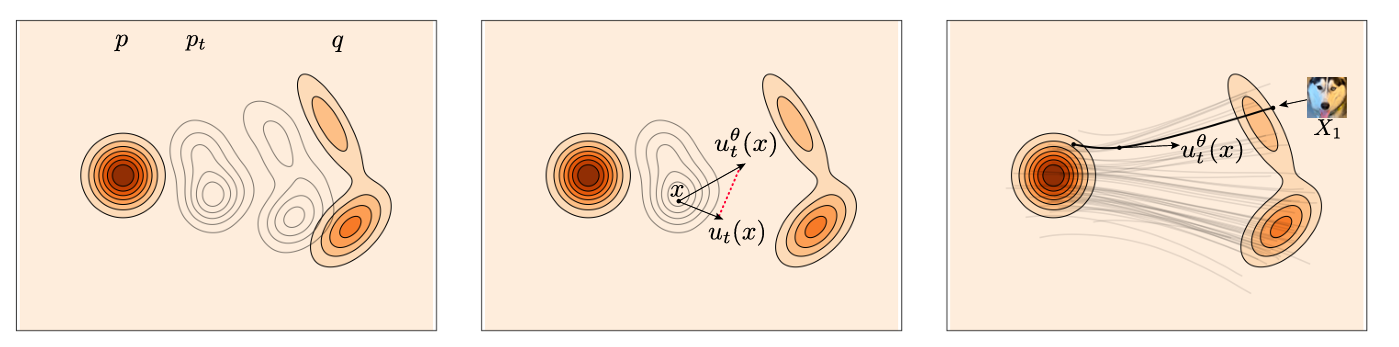
readme_imgs/alg.png
0 → 100644
{kind=link}
189 KB
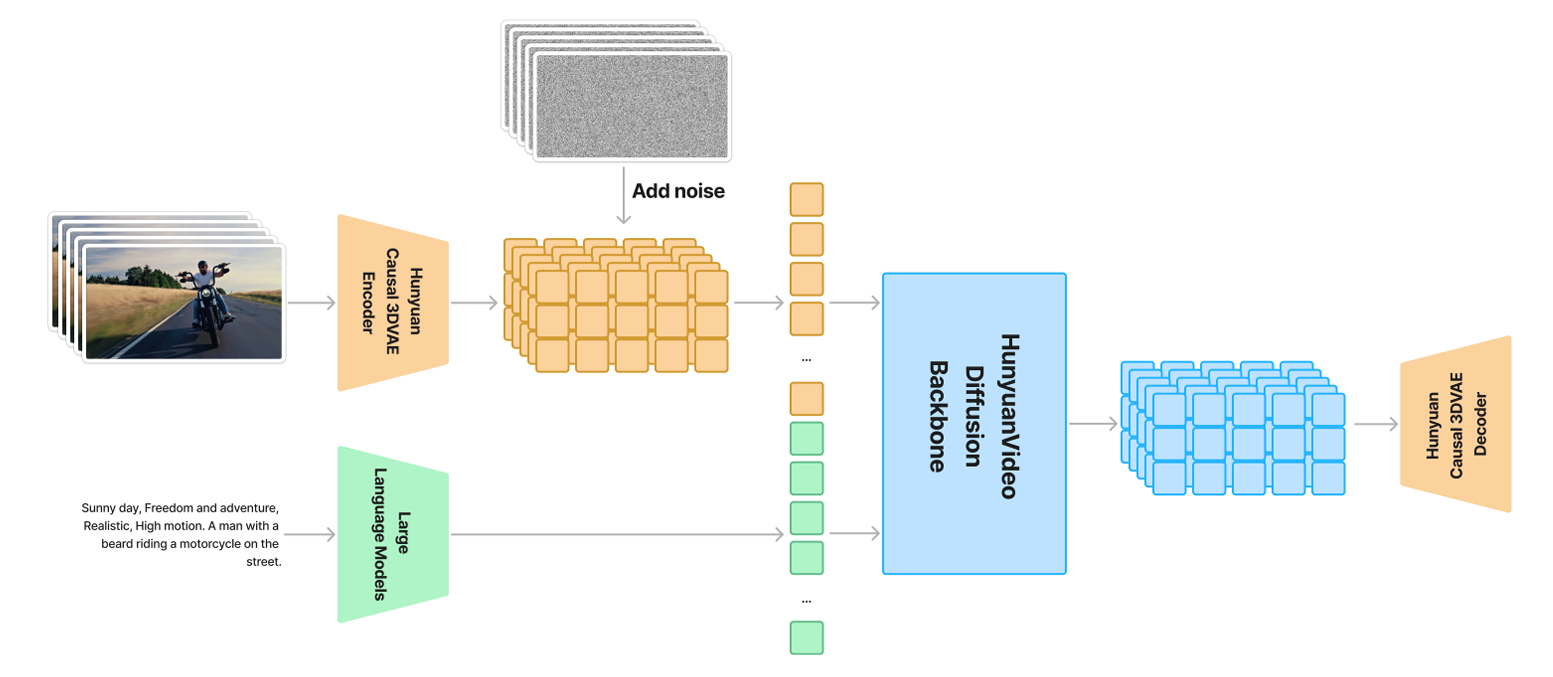
readme_imgs/arch.png
0 → 100644
{kind=link}
247 KB
readme_imgs/hy_i2v.gif
0 → 100644
{kind=link}
This image diff could not be displayed because it is too large. You can view the blob instead.
requirements.txt
0 → 100644
| opencv-python==4.9.0.80 | ||
| diffusers==0.31.0 | ||
| accelerate==1.1.1 | ||
| pandas==2.0.3 | ||
| # numpy==1.24.4 | ||
| einops==0.7.0 | ||
| tqdm==4.66.2 | ||
| loguru==0.7.2 | ||
| imageio==2.34.0 | ||
| imageio-ffmpeg==0.5.1 | ||
| safetensors==0.4.3 | ||
| peft==0.13.2 | ||
| transformers==4.39.3 | ||
| tokenizers==0.15.0 | ||
| # deepspeed==0.15.1 | ||
| pyarrow==14.0.1 | ||
| tensorboard==2.19.0 | ||
| # git+https://github.com/openai/CLIP.git |
sample_image2video.py
0 → 100644