
hunyuandit
parents
Showing
hydit/modules/embedders.py
0 → 100644
hydit/modules/models.py
0 → 100644
hydit/modules/norm_layers.py
0 → 100644
hydit/modules/poolers.py
0 → 100644
hydit/modules/trt/engine.py
0 → 100644
hydit/utils/tools.py
0 → 100644
model.properties
0 → 100644
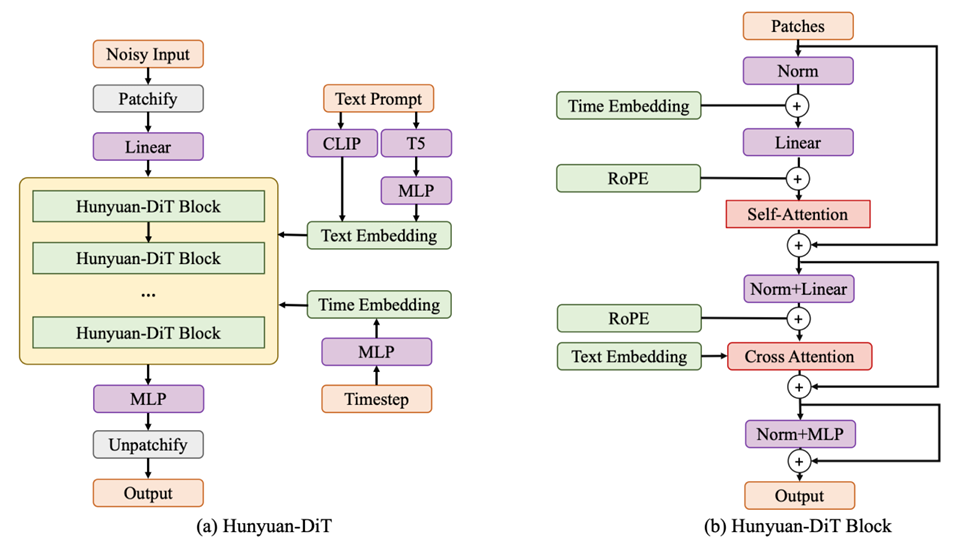
readme_imgs/alg.png
0 → 100644
{kind=link}
76.1 KB
{kind=link}
135 KB
readme_imgs/result_1.png
0 → 100644
{kind=link}

2.12 MB
readme_imgs/result_2.png
0 → 100644
{kind=link}

2.33 MB
readme_imgs/result_3.png
0 → 100644
{kind=link}

1.95 MB
readme_imgs/result_4.png
0 → 100644
{kind=link}

351 KB
requirements.txt
0 → 100644
| # --extra-index-url https://pypi.ngc.nvidia.com | ||
| # timm==0.9.5 | ||
| diffusers==0.21.2 | ||
| peft==0.10.0 | ||
| protobuf==3.19.0 | ||
| # torchvision==0.14.1 | ||
| transformers==4.37.2 | ||
| accelerate==0.29.3 | ||
| loguru==0.7.2 | ||
| einops==0.7.0 | ||
| sentencepiece==0.1.99 | ||
| # cuda-python==11.7.1 | ||
| # onnxruntime==1.12.1 | ||
| # onnx==1.12.0 | ||
| # nvidia-pyindex==1.0.9 | ||
| # onnx-graphsurgeon==0.3.27 | ||
| # polygraphy==0.47.1 | ||
| pandas==2.0.3 | ||
| gradio==3.50.2 | ||
| loguru | ||
| \ No newline at end of file |
sample_t2i.py
0 → 100644
trt/build_engine.sh
0 → 100644
trt/export_onnx.py
0 → 100644