
Initial commit
Showing
.DS_Store
0 → 100644
File added
.gitignore
0 → 100644
.idea/.gitignore
0 → 100644
.idea/misc.xml
0 → 100644
.idea/modules.xml
0 → 100644
Dockerfile
0 → 100644
EfficientSAM_example.py
0 → 100644
EfficientSAM_onnx_example.py
0 → 100644
LICENSE
0 → 100644
README.md
0 → 100644
{kind=link}
347 KB
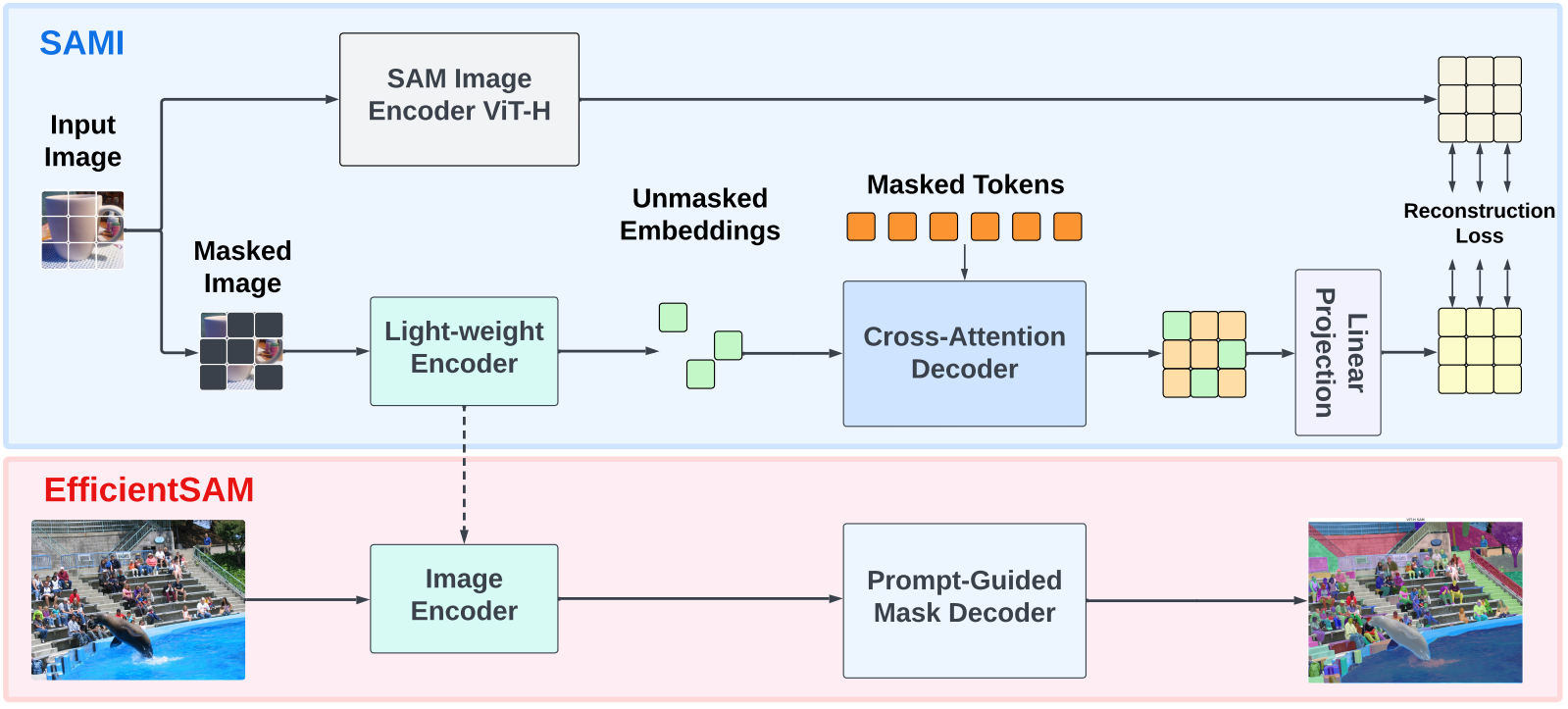
doc/The overview.png
0 → 100644
{kind=link}
171 KB
efficient_sam/__init__.py
0 → 100644
efficient_sam/mlp.py
0 → 100644