
animatediff
Showing
{kind=link}

127 KB
{kind=link}

123 KB
{kind=link}

108 KB
{kind=link}

12.6 KB
{kind=link}
7.71 KB
{kind=link}

7.97 KB
{kind=link}

8.11 KB
{kind=link}

50 KB
__assets__/docs/gallery.md
0 → 100644
{kind=link}
374 KB
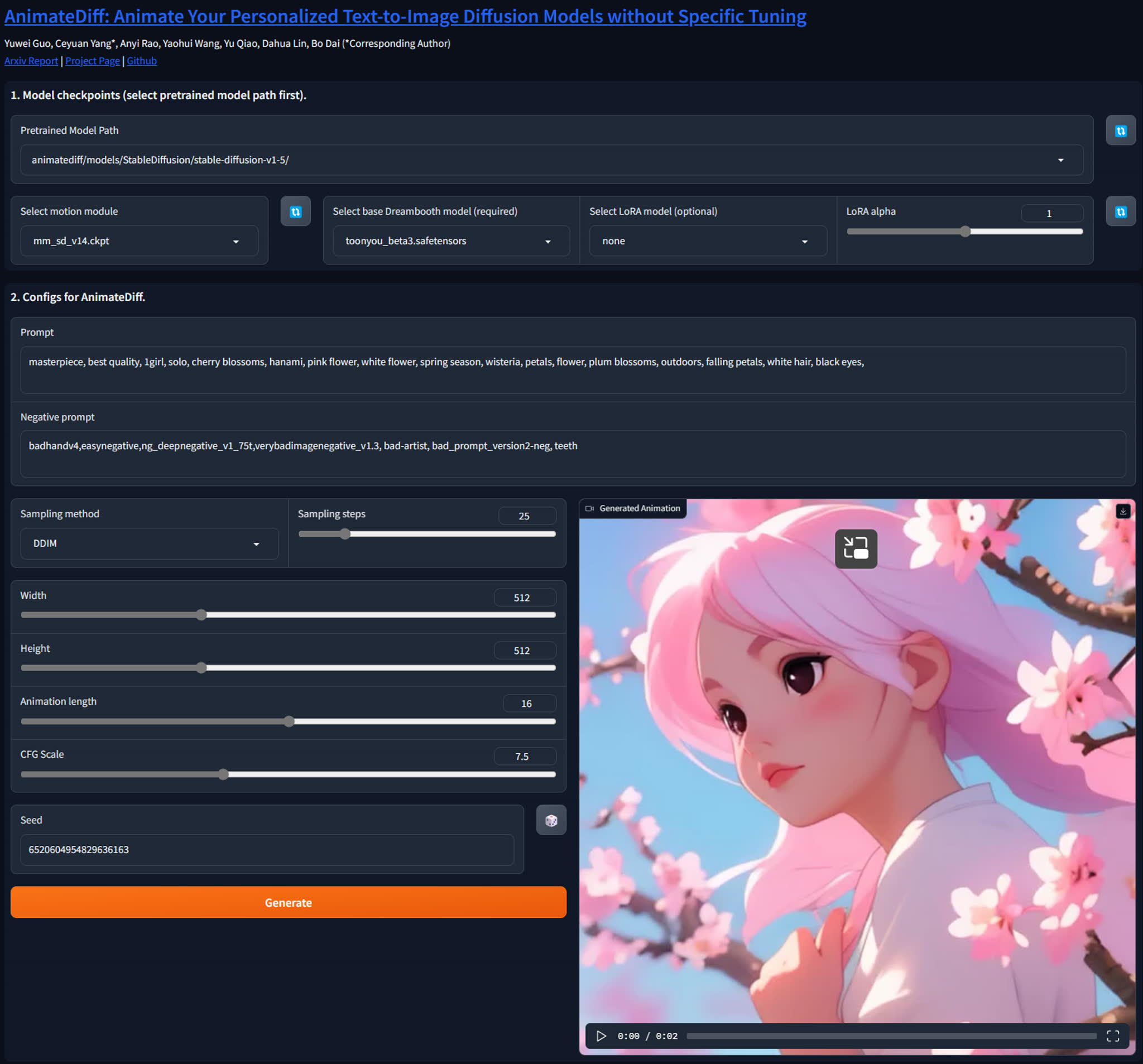
__assets__/figs/gradio.jpg
0 → 100644
{kind=link}
370 KB
animatediff/data/dataset.py
0 → 100644
animatediff/models/resnet.py
0 → 100644
animatediff/models/unet.py
0 → 100644