
v1.0
Showing
Too many changes to show.
To preserve performance only 508 of 508+ files are displayed.
examples/MMPT/setup.py
0 → 100644
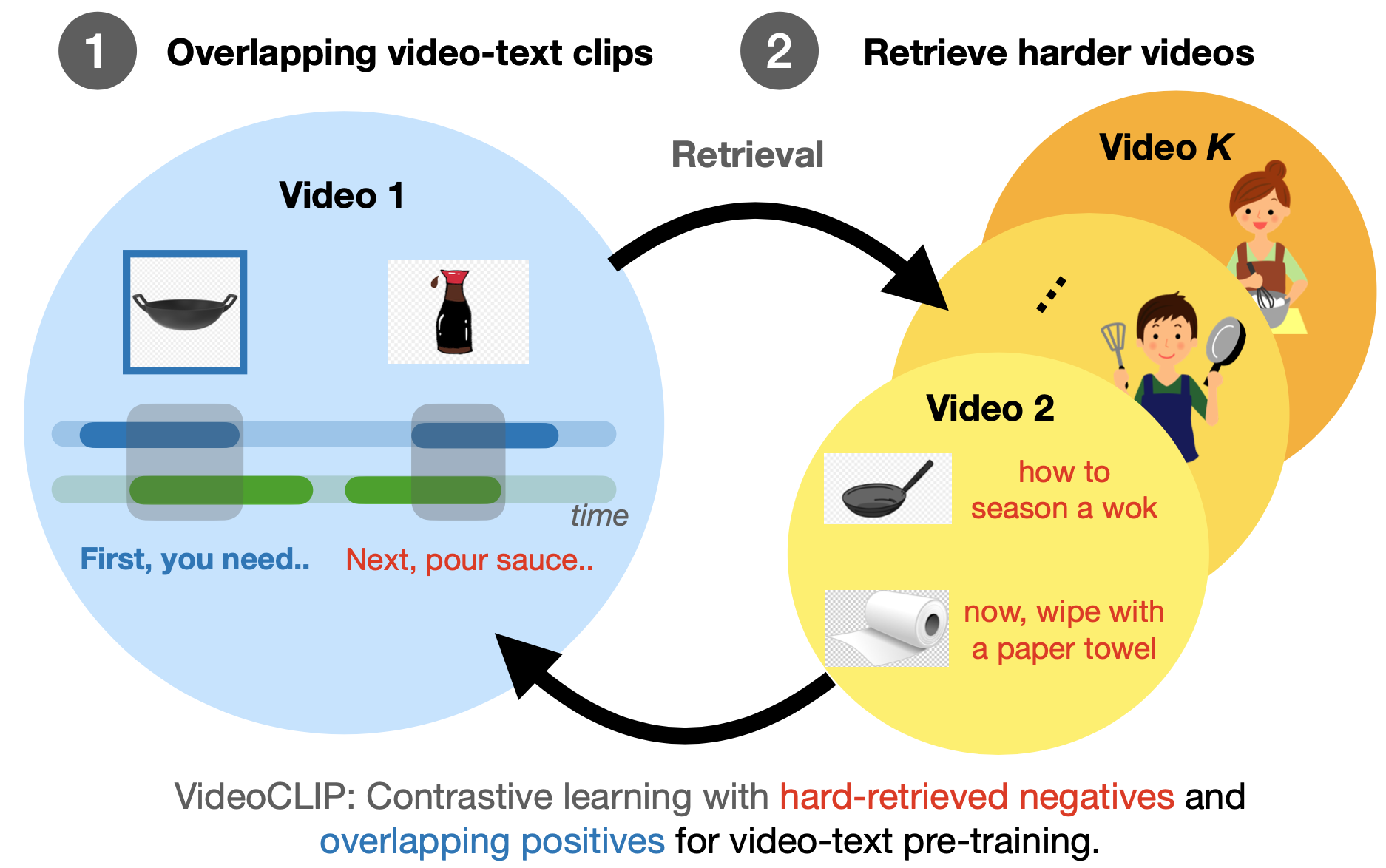
examples/MMPT/videoclip.png
0 → 100644
{kind=link}
377 KB
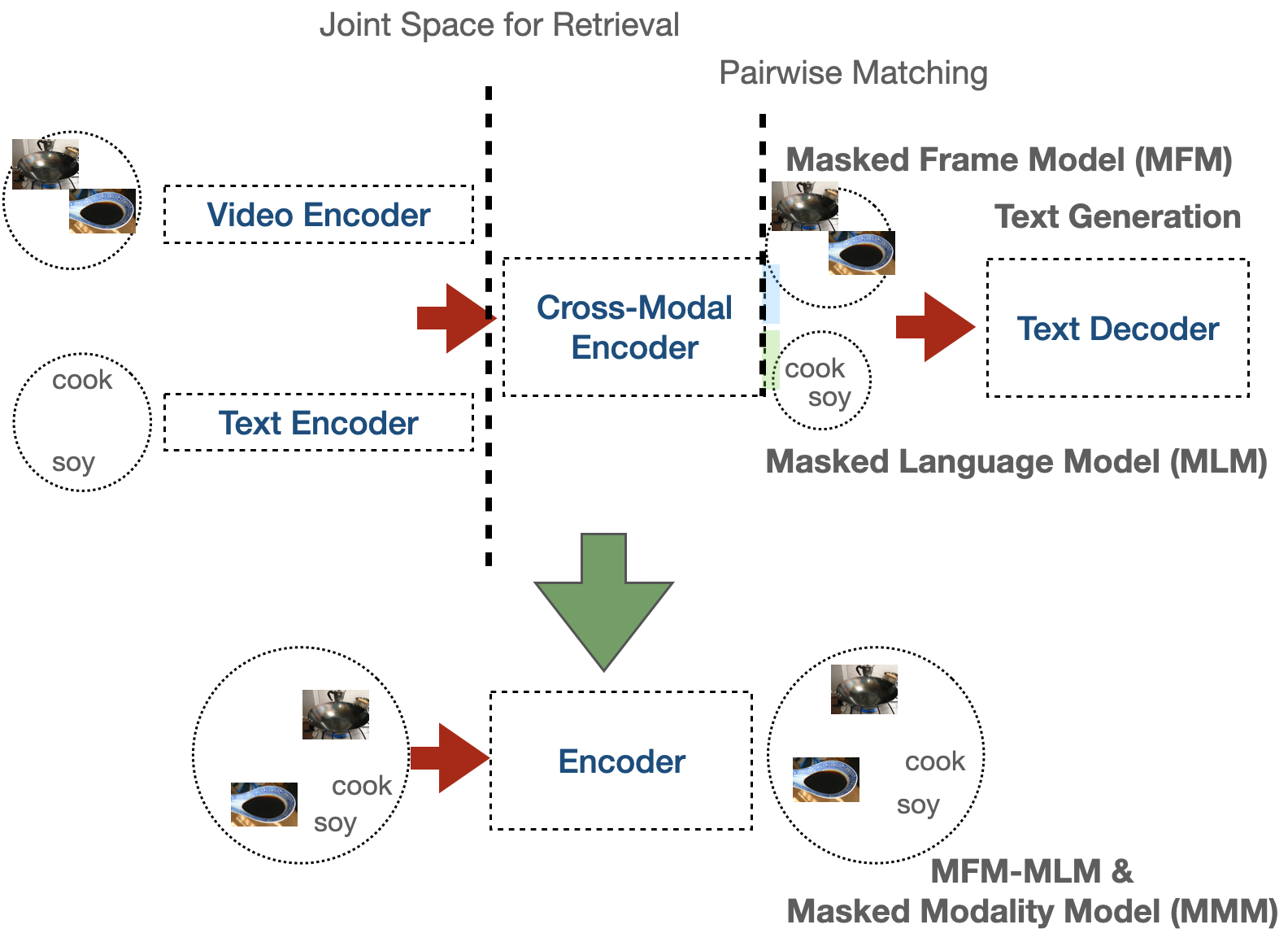
examples/MMPT/vlm.png
0 → 100644
{kind=link}
409 KB
examples/__init__.py
0 → 100644