*This model was released on 2021-06-01 and added to Hugging Face Transformers on 2022-05-02.*
# YOLOS
[YOLOS](https://huggingface.co/papers/2106.00666) uses a [Vision Transformer (ViT)](./vit) for object detection with minimal modifications and region priors. It can achieve performance comparable to specialized object detection models and frameworks with knowledge about 2D spatial structures.
You can find all the original YOLOS checkpoints under the [HUST Vision Lab](https://huggingface.co/hustvl/models?search=yolos) organization.
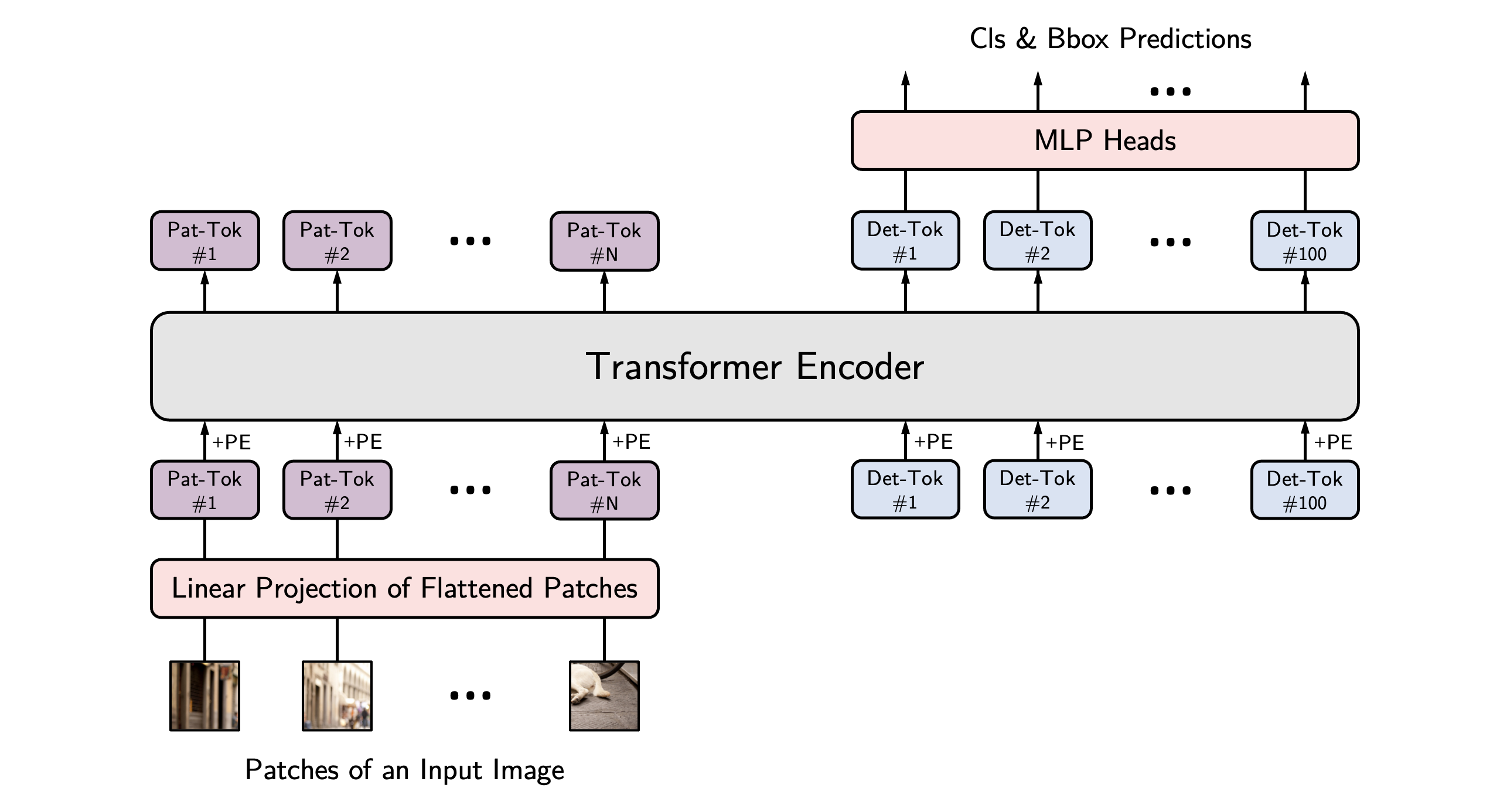 YOLOS architecture. Taken from the original paper.
> [!TIP]
> This model wasa contributed by [nielsr](https://huggingface.co/nielsr).
> Click on the YOLOS models in the right sidebar for more examples of how to apply YOLOS to different object detection tasks.
The example below demonstrates how to detect objects with [`Pipeline`] or the [`AutoModel`] class.
```py
import torch
from transformers import pipeline
detector = pipeline(
task="object-detection",
model="hustvl/yolos-base",
dtype=torch.float16,
device=0
)
detector("https://huggingface.co/datasets/Narsil/image_dummy/raw/main/parrots.png")
```
```py
import torch
from PIL import Image
import requests
from transformers import AutoImageProcessor, AutoModelForObjectDetection
from accelerate import Accelerator
device = Accelerator().device
processor = AutoImageProcessor.from_pretrained("hustvl/yolos-base")
model = AutoModelForObjectDetection.from_pretrained("hustvl/yolos-base", dtype=torch.float16, attn_implementation="sdpa").to(device)
url = "https://huggingface.co/datasets/Narsil/image_dummy/raw/main/parrots.png"
image = Image.open(requests.get(url, stream=True).raw).convert("RGB")
inputs = processor(images=image, return_tensors="pt").to(model.device)
with torch.no_grad():
outputs = model(**inputs)
logits = outputs.logits.softmax(-1)
scores, labels = logits[..., :-1].max(-1)
boxes = outputs.pred_boxes
threshold = 0.3
keep = scores[0] > threshold
filtered_scores = scores[0][keep]
filtered_labels = labels[0][keep]
filtered_boxes = boxes[0][keep]
width, height = image.size
pixel_boxes = filtered_boxes * torch.tensor([width, height, width, height], device=boxes.device)
for score, label, box in zip(filtered_scores, filtered_labels, pixel_boxes):
x0, y0, x1, y1 = box.tolist()
print(f"Label {model.config.id2label[label.item()]}: {score:.2f} at [{x0:.0f}, {y0:.0f}, {x1:.0f}, {y1:.0f}]")
```
## Notes
- Use [`YolosImageProcessor`] for preparing images (and optional targets) for the model. Contrary to [DETR](./detr), YOLOS doesn't require a `pixel_mask`.
## Resources
- Refer to these [notebooks](https://github.com/NielsRogge/Transformers-Tutorials/tree/master/YOLOS) for inference and fine-tuning with [`YolosForObjectDetection`] on a custom dataset.
## YolosConfig
[[autodoc]] YolosConfig
## YolosImageProcessor
[[autodoc]] YolosImageProcessor
- preprocess
## YolosImageProcessorFast
[[autodoc]] YolosImageProcessorFast
- preprocess
- pad
- post_process_object_detection
## YolosModel
[[autodoc]] YolosModel
- forward
## YolosForObjectDetection
[[autodoc]] YolosForObjectDetection
- forward
YOLOS architecture. Taken from the original paper.
> [!TIP]
> This model wasa contributed by [nielsr](https://huggingface.co/nielsr).
> Click on the YOLOS models in the right sidebar for more examples of how to apply YOLOS to different object detection tasks.
The example below demonstrates how to detect objects with [`Pipeline`] or the [`AutoModel`] class.
```py
import torch
from transformers import pipeline
detector = pipeline(
task="object-detection",
model="hustvl/yolos-base",
dtype=torch.float16,
device=0
)
detector("https://huggingface.co/datasets/Narsil/image_dummy/raw/main/parrots.png")
```
```py
import torch
from PIL import Image
import requests
from transformers import AutoImageProcessor, AutoModelForObjectDetection
from accelerate import Accelerator
device = Accelerator().device
processor = AutoImageProcessor.from_pretrained("hustvl/yolos-base")
model = AutoModelForObjectDetection.from_pretrained("hustvl/yolos-base", dtype=torch.float16, attn_implementation="sdpa").to(device)
url = "https://huggingface.co/datasets/Narsil/image_dummy/raw/main/parrots.png"
image = Image.open(requests.get(url, stream=True).raw).convert("RGB")
inputs = processor(images=image, return_tensors="pt").to(model.device)
with torch.no_grad():
outputs = model(**inputs)
logits = outputs.logits.softmax(-1)
scores, labels = logits[..., :-1].max(-1)
boxes = outputs.pred_boxes
threshold = 0.3
keep = scores[0] > threshold
filtered_scores = scores[0][keep]
filtered_labels = labels[0][keep]
filtered_boxes = boxes[0][keep]
width, height = image.size
pixel_boxes = filtered_boxes * torch.tensor([width, height, width, height], device=boxes.device)
for score, label, box in zip(filtered_scores, filtered_labels, pixel_boxes):
x0, y0, x1, y1 = box.tolist()
print(f"Label {model.config.id2label[label.item()]}: {score:.2f} at [{x0:.0f}, {y0:.0f}, {x1:.0f}, {y1:.0f}]")
```
## Notes
- Use [`YolosImageProcessor`] for preparing images (and optional targets) for the model. Contrary to [DETR](./detr), YOLOS doesn't require a `pixel_mask`.
## Resources
- Refer to these [notebooks](https://github.com/NielsRogge/Transformers-Tutorials/tree/master/YOLOS) for inference and fine-tuning with [`YolosForObjectDetection`] on a custom dataset.
## YolosConfig
[[autodoc]] YolosConfig
## YolosImageProcessor
[[autodoc]] YolosImageProcessor
- preprocess
## YolosImageProcessorFast
[[autodoc]] YolosImageProcessorFast
- preprocess
- pad
- post_process_object_detection
## YolosModel
[[autodoc]] YolosModel
- forward
## YolosForObjectDetection
[[autodoc]] YolosForObjectDetection
- forward