
First commit
Showing
docs/INSTALL.md
0 → 100644
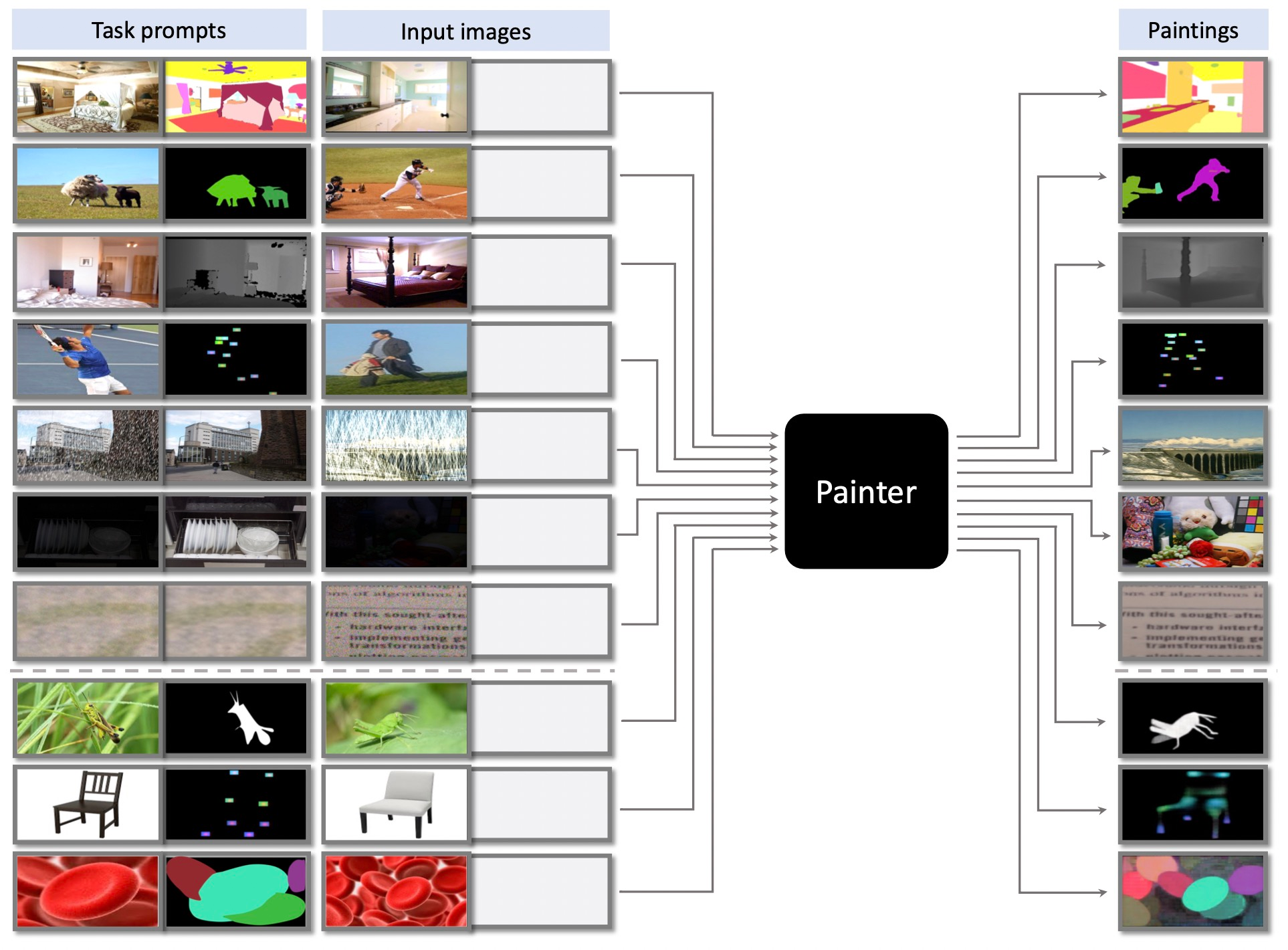
docs/teaser.jpg
0 → 100644
{kind=link}
1.93 MB
engine_train.py
0 → 100644
eval/ade20k_semantic/eval.sh
0 → 100644
eval/coco_panoptic/eval.sh
0 → 100644