
Initial commit
parents
Showing
docs/img/spot_texw.png
0 → 100644
{kind=link}

13.3 KB
docs/img/spot_tri.png
0 → 100644
{kind=link}

24.7 KB
docs/img/spot_uv.png
0 → 100644
{kind=link}
37.9 KB
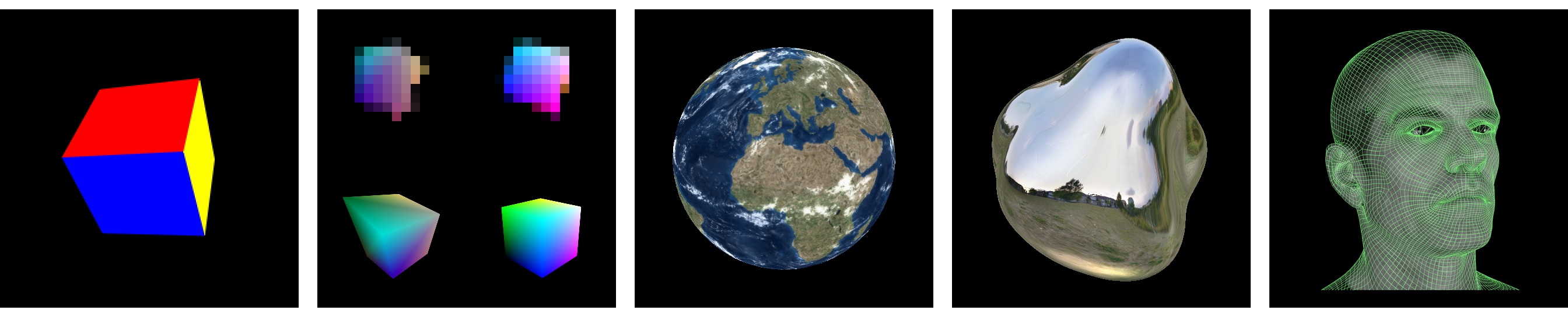
docs/img/teaser.png
0 → 100644
{kind=link}
730 KB
docs/img/teaser1.png
0 → 100644
{kind=link}
19 KB
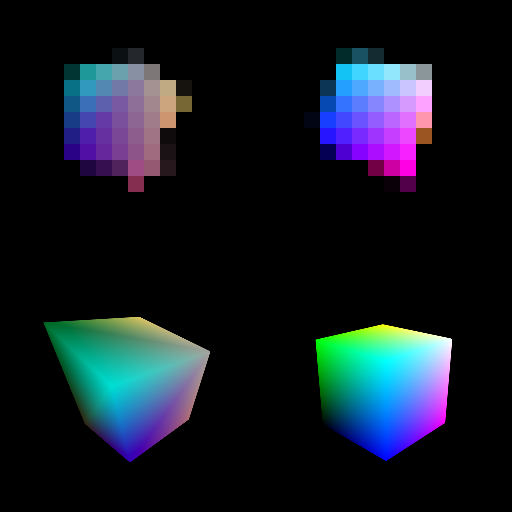
docs/img/teaser2.png
0 → 100644
{kind=link}

230 KB
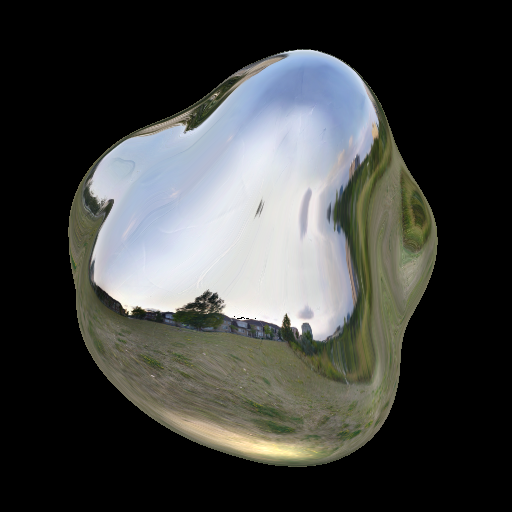
docs/img/teaser3.png
0 → 100644
{kind=link}
176 KB
docs/img/teaser4.png
0 → 100644
{kind=link}
3.9 KB
docs/img/teaser5.png
0 → 100644
{kind=link}
263 KB
docs/img/tri.png
0 → 100644
{kind=link}
2.37 KB
docs/index.html
0 → 100644
nvdiffrast/__init__.py
0 → 100644
nvdiffrast/common/common.cpp
0 → 100644
nvdiffrast/common/common.h
0 → 100644
nvdiffrast/common/glutil.inl
0 → 100644