Skip to content
GitLab
Menu
Projects
Groups
Snippets
Loading...
Help
Help
Support
Community forum
Keyboard shortcuts
?
Submit feedback
Contribute to GitLab
Sign in / Register
Toggle navigation
Menu
Open sidebar
OpenDAS
OpenPCDet
Commits
63d6540c
Commit
63d6540c
authored
Jul 01, 2020
by
Shaoshuai Shi
Browse files
update README.md
parent
b32fbddb
Changes
8
Show whitespace changes
Inline
Side-by-side
Showing
8 changed files
with
27 additions
and
13 deletions
+27
-13
README.md
README.md
+24
-7
docs/INSTALL.md
docs/INSTALL.md
+1
-1
docs/dataset_vs_model.png
docs/dataset_vs_model.png
+0
-0
docs/model_framework.png
docs/model_framework.png
+0
-0
docs/open_mmlab.png
docs/open_mmlab.png
+0
-0
pcdet/datasets/augmentor/data_augmentor.py
pcdet/datasets/augmentor/data_augmentor.py
+0
-2
pcdet/datasets/processor/data_processor.py
pcdet/datasets/processor/data_processor.py
+1
-2
setup.py
setup.py
+1
-1
No files found.
README.md
View file @
63d6540c
# OpenLidarPerceptron
<img
src=
"docs/open_mmlab.png"
align=
"right"
width=
"30%"
>
# OpenPCDet
## Introduction
`OpenLidarPerceptron`
is an open source project for LiDAR-based 3D scene perception.
As of now, it mainly consists of
`PCDet`
toolbox for 3D object detection from point cloud,
and we are going to support LiDAR segmentation and odometry in the next phase.
`OpenPCDet`
is an open source project for LiDAR-based 3D scene perception.
As of now, it mainly consists of
`PCDet`
toolbox for 3D object detection from point cloud.
### What does `PCDet` toolbox do?
...
...
@@ -22,9 +23,21 @@ It is also the official code release of [`[Part-A^2 net]`](https://arxiv.org/abs
We are actively updating this repo currently, and more datasets and models will be supported soon.
Contributions are also welcomed.
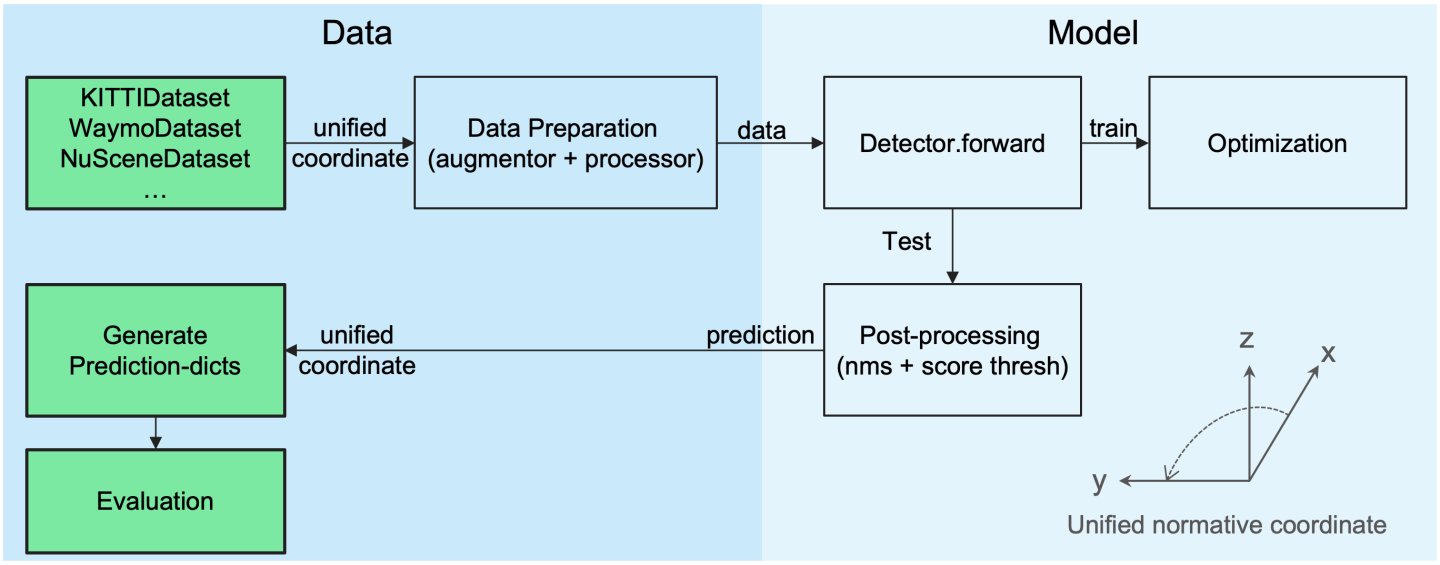
### `PCDet` design pattern
*
Data-Model separation with unified point cloud coordinate for easily extending to custom datasets:
<p
align=
"center"
>
<img
src=
"docs/dataset_vs_model.png"
width=
"95%"
height=
"320"
>
</p>
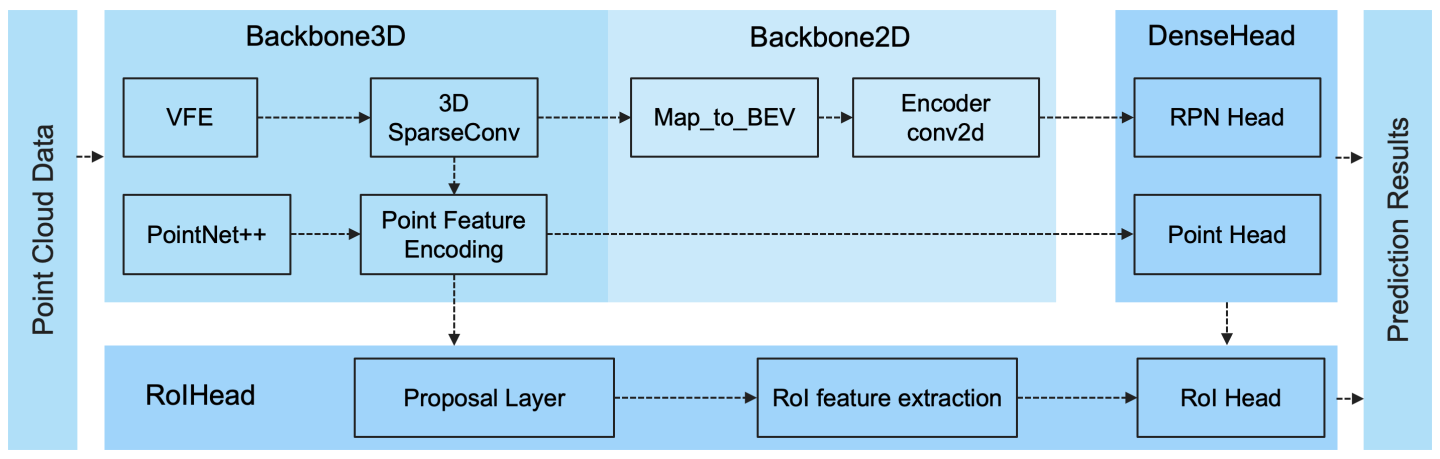
*
Flexible and clear model structure to easily support various 3D detection models:
<p
align=
"center"
>
<img
src=
"docs/model_framework.png"
width=
"95%"
>
</p>
### Currently Supported Features
-
[x] Unified point cloud coordinate and clear code structure and for supporting lots of datasets and approaches
-
[x] Support both one-stage and two-stage 3D object detection frameworks
-
[x] Support distributed training & testing with multiple GPUs and multiple machines
-
[x] Support multiple heads on different scales to detect different classes
...
...
@@ -33,6 +46,7 @@ Contributions are also welcomed.
-
[x] Support RoI-aware point cloud pooling & RoI-grid point cloud pooling
-
[x] Support GPU version 3D IoU calculation and rotated NMS
## Model Zoo
### KITTI 3D Object Detection Baselines
...
...
@@ -48,6 +62,9 @@ All models are trained with 8 GPUs and are available for download.
|
[
SECOND-MultiHead
](
tools/cfgs/kitti_models/second_multihead.yaml
)
| 32 | - | - | - | ongoing |
| PointRCNN | 32 | - | - | - | ongoing|
### Other datasets
More datasets are on the way.
## Installation
Please refer to
[
INSTALL.md
](
docs/INSTALL.md
)
for installation and dataset preparation.
...
...
@@ -59,10 +76,10 @@ Please refer to [GETTING_STARTED.md](docs/GETTING_STARTED.md) to learn more usag
## License
`Open
LidarPerceptron
`
is released under the
[
Apache 2.0 license
](
LICENSE
)
.
`Open
PCDet
`
is released under the
[
Apache 2.0 license
](
LICENSE
)
.
## Acknowledgement
`Open
LidarPerceptron
`
is an open source project for LiDAR-based 3D scene perception that supports multiple
`Open
PCDet
`
is an open source project for LiDAR-based 3D scene perception that supports multiple
LiDAR-based perception models as shown above. Some parts of
`PCDet`
are learned from the official released codes of the above supported methods.
We would like to thank for their proposed methods and the official implementation.
...
...
docs/INSTALL.md
View file @
63d6540c
...
...
@@ -14,7 +14,7 @@ NOTE: Please re-install `pcdet v0.2` by running `python setup.py develop` if you
a. Clone this repository.
```
shell
git clone https://github.com/open-mmlab/Open
LidarPerceptron
.git
git clone https://github.com/open-mmlab/Open
PCDet
.git
```
b. Install the dependent libraries as follows:
...
...
docs/dataset_vs_model.png
0 → 100644
View file @
63d6540c
123 KB
docs/model_framework.png
0 → 100644
View file @
63d6540c
102 KB
docs/open_mmlab.png
0 → 100644
View file @
63d6540c
256 KB
pcdet/datasets/augmentor/data_augmentor.py
View file @
63d6540c
...
...
@@ -46,7 +46,6 @@ class DataAugmentor(object):
data_dict
[
'points'
]
=
points
return
data_dict
def
random_world_rotation
(
self
,
data_dict
=
None
,
config
=
None
):
if
data_dict
is
None
:
return
partial
(
self
.
random_world_rotation
,
config
=
config
)
...
...
@@ -61,7 +60,6 @@ class DataAugmentor(object):
data_dict
[
'points'
]
=
points
return
data_dict
def
random_world_scaling
(
self
,
data_dict
=
None
,
config
=
None
):
if
data_dict
is
None
:
return
partial
(
self
.
random_world_scaling
,
config
=
config
)
...
...
pcdet/datasets/processor/data_processor.py
View file @
63d6540c
...
...
@@ -14,7 +14,6 @@ class DataProcessor(object):
cur_processor
=
getattr
(
self
,
cur_cfg
.
NAME
)(
config
=
cur_cfg
)
self
.
data_processor_queue
.
append
(
cur_processor
)
def
mask_points_and_boxes_outside_range
(
self
,
data_dict
=
None
,
config
=
None
):
if
data_dict
is
None
:
return
partial
(
self
.
mask_points_and_boxes_outside_range
,
config
=
config
)
...
...
setup.py
View file @
63d6540c
...
...
@@ -33,7 +33,7 @@ if __name__ == '__main__':
setup
(
name
=
'pcdet'
,
version
=
version
,
description
=
'PCDet is a general codebase for 3D object detection from point cloud'
,
description
=
'
Open
PCDet is a general codebase for 3D object detection from point cloud'
,
install_requires
=
[
'numpy'
,
'torch>=1.1'
,
...
...
Write
Preview
Markdown
is supported
0%
Try again
or
attach a new file
.
Attach a file
Cancel
You are about to add
0
people
to the discussion. Proceed with caution.
Finish editing this message first!
Cancel
Please
register
or
sign in
to comment

{kind=link}
{kind=link}
{kind=link}
