
ZeRO-2 (#217)
Updates for ZeRO stage 2 + ZeRO stage 1 w. RS Co-authored-by:Tunji Ruwase <olruwase@microsoft.com> Co-authored-by:
Samyam Rajbhandari <samyamr@microsoft.com> Co-authored-by:
Shaden Smith <ShadenTSmith@gmail.com> Co-authored-by:
Elton Zheng <eltonz@microsoft.com> Co-authored-by:
Shaden Smith <Shaden.Smith@microsoft.com> Co-authored-by:
yuxionghe <yuxhe@microsoft.com> Co-authored-by:
Arash Ashari <arashari@microsoft.com>
Showing
docs/_pages/config-json.md
100644 → 100755
docs/_pages/features.md
100644 → 100755
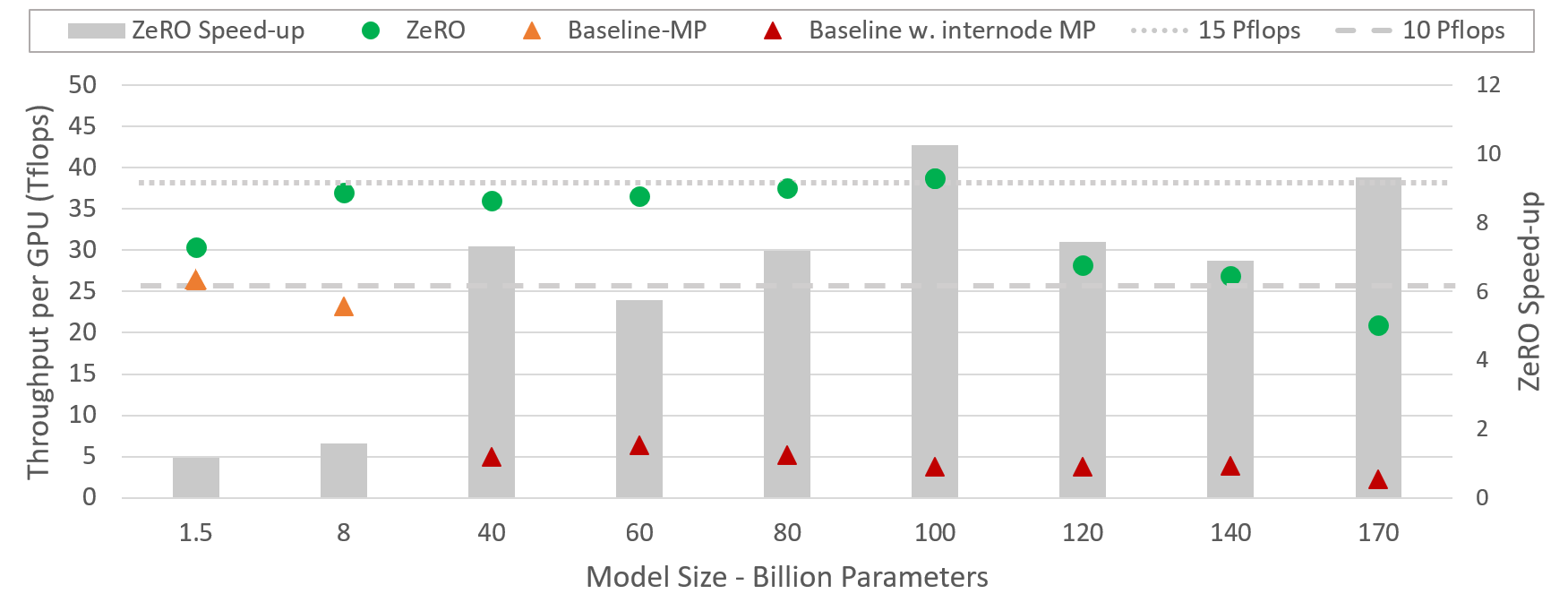
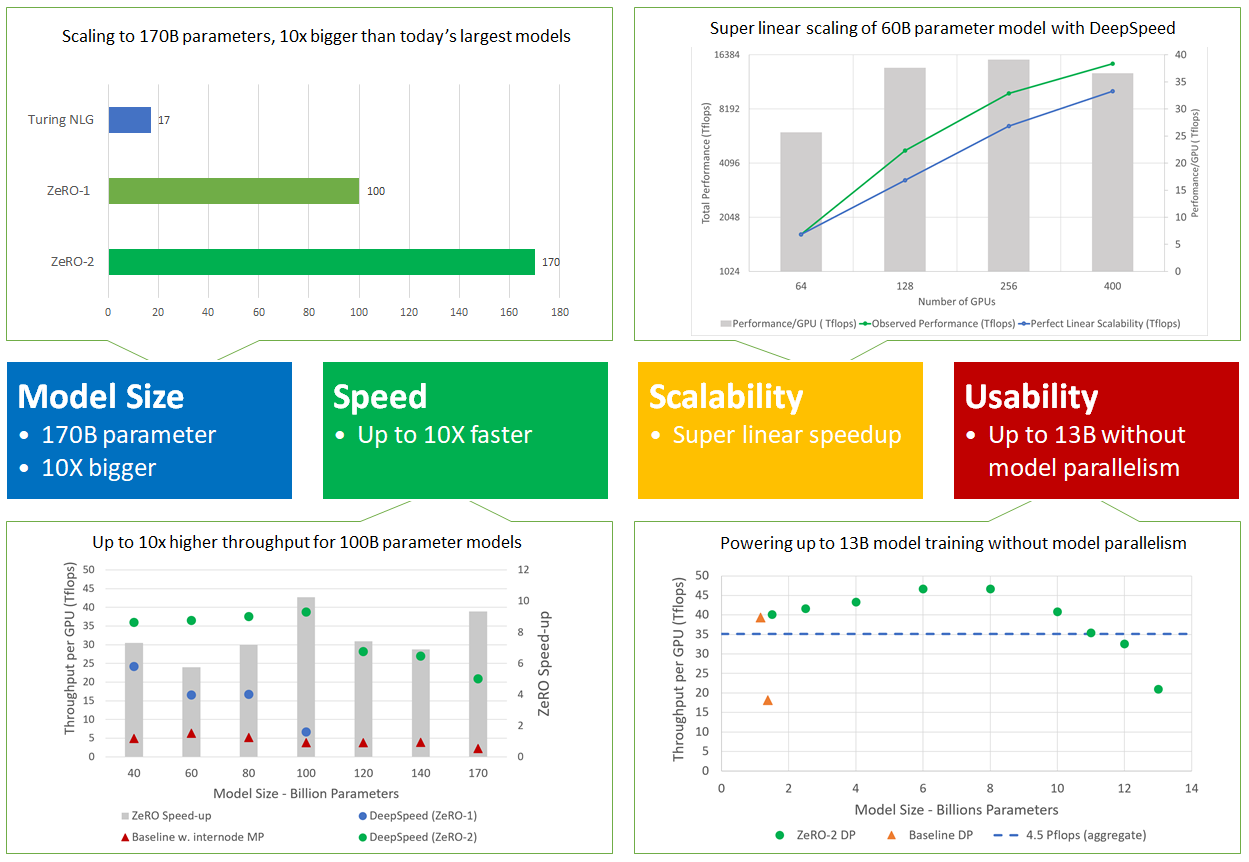
docs/assets/images/DeepSpeed-vs-Megatron.png
100755 → 100644
{kind=link}
File mode changed from 100755 to 100644
{kind=link}
77.6 KB
{kind=link}
File mode changed from 100755 to 100644
{kind=link}
121 KB
docs/code-docs/requirements.local.txt
100644 → 100755
File mode changed from 100644 to 100755